全息投影套件

1 套件硬件介绍
1.1 MyCobot Pro630机械臂
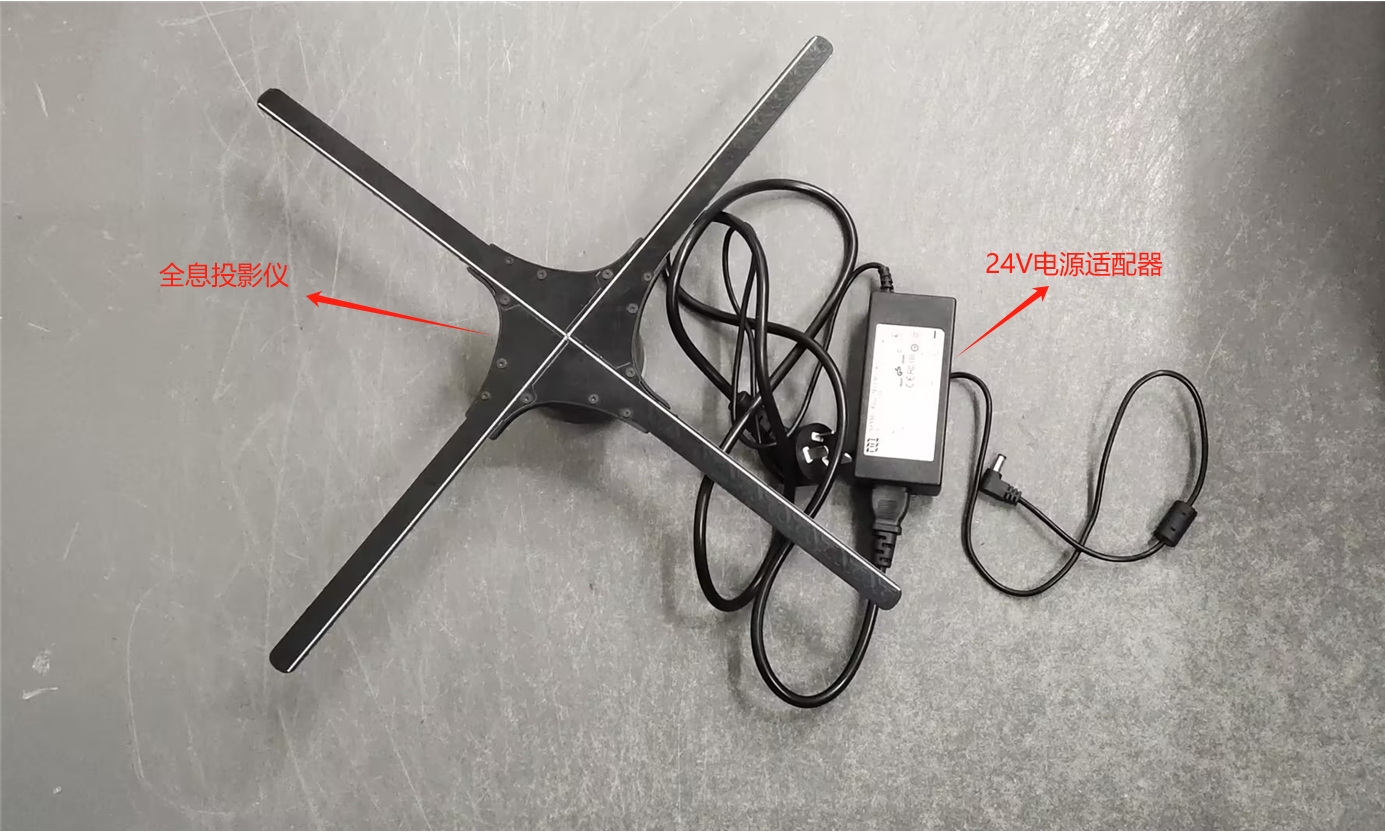
1.2 全息投影仪
1.3 末端连接件

2 套件搭建
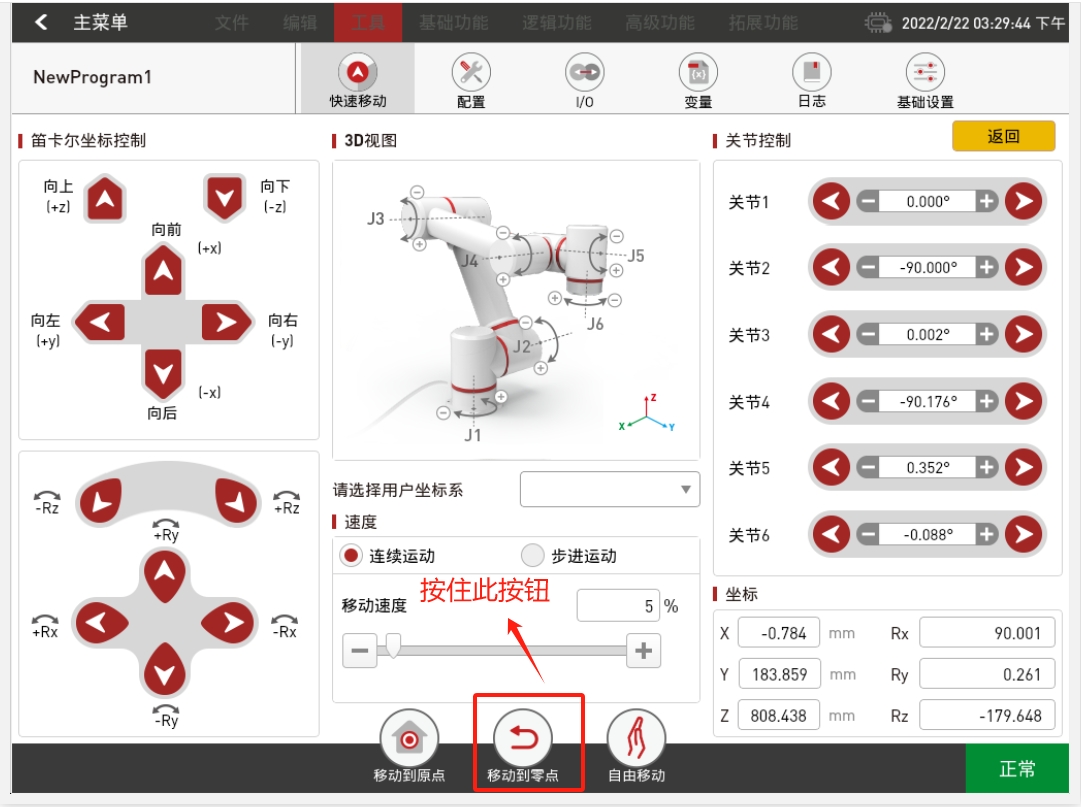
2.1 机器人姿态调整
先用VNC进入机器人系统,再先利用RoboFlow软件将机器人各关节回零点。更多机器人操作可到官方帮助文档查看机器人使用帮助文档
2.2 末端连接件安装
先用M6内六角扳手将4颗螺丝固定在机械臂末端法兰上
 用M6内六角扳手将2颗螺丝固定金属件上
用M6内六角扳手将2颗螺丝固定金属件上

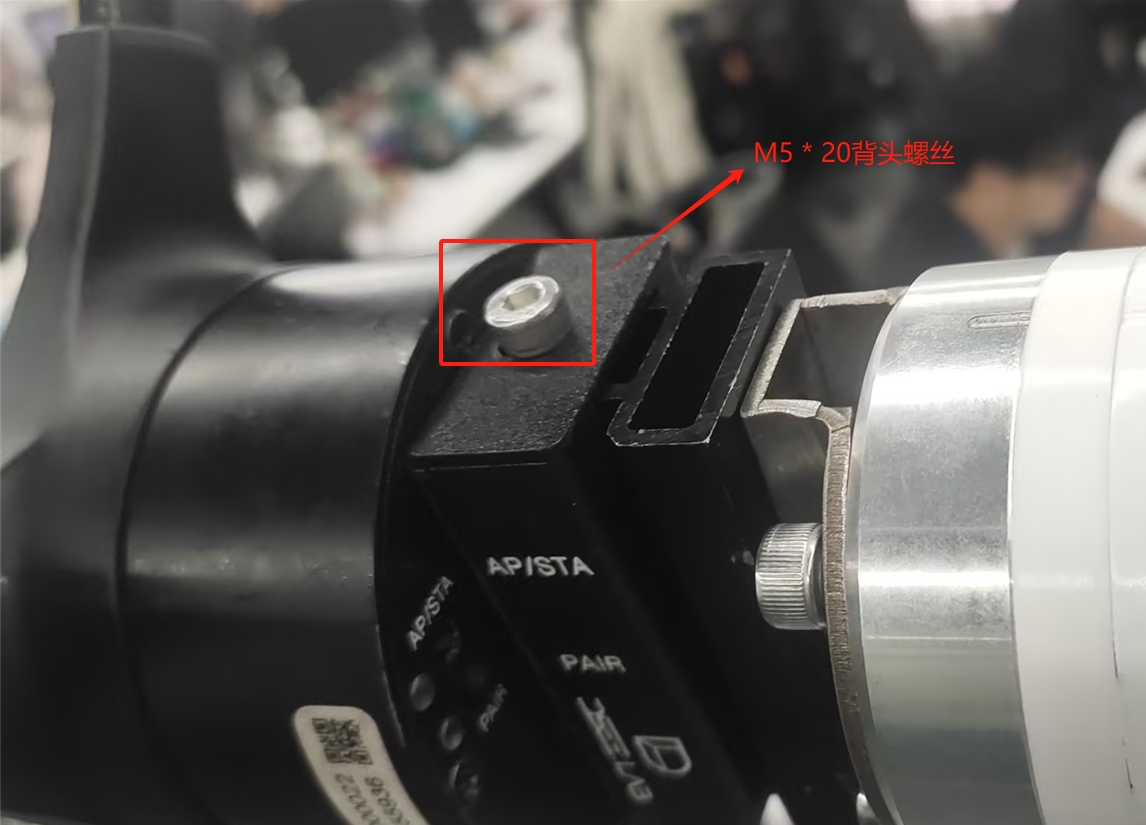
2.3 全息投影仪与连接件安装
用M5内六角扳手将全息投影仪与连接件拼接起来
3 全息投影使用
3.1 WiFi连接
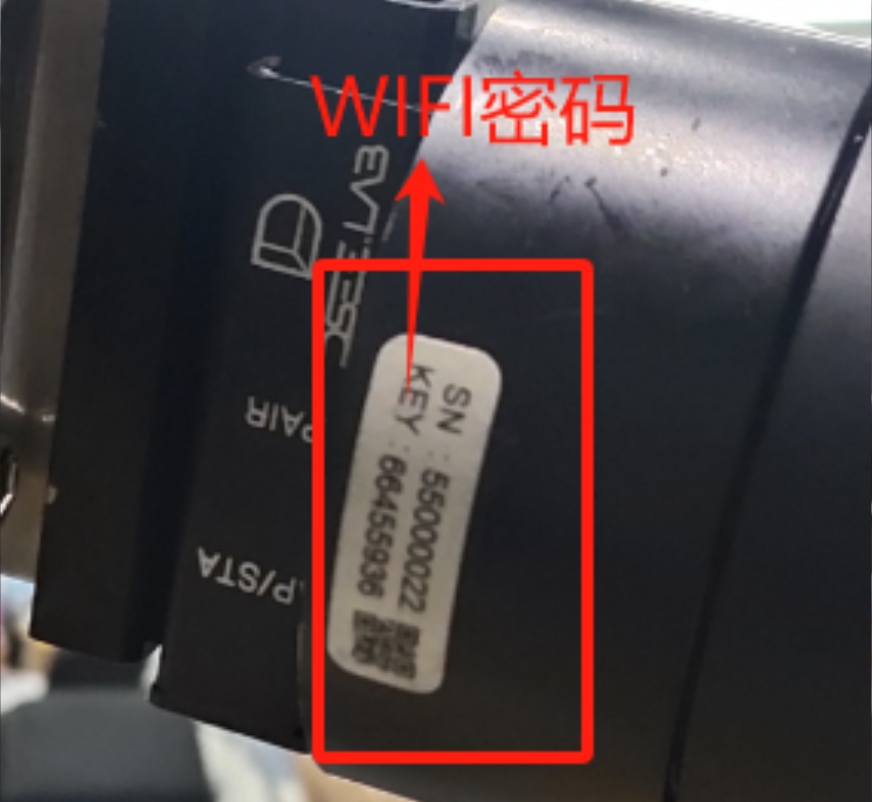
给全息投影插上24V电源适配器,利用电脑搜寻投影的wifi,wifi的密码贴在投影傍边。然后使用全息投影的软件进行连接。
第一步:給全息投影仪上电
 第二步:找到设备WIFI
第二步:找到设备WIFI
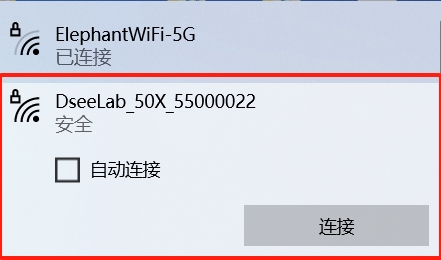 第三步:输入设备WIFI密码
第三步:输入设备WIFI密码
3.2影片上传
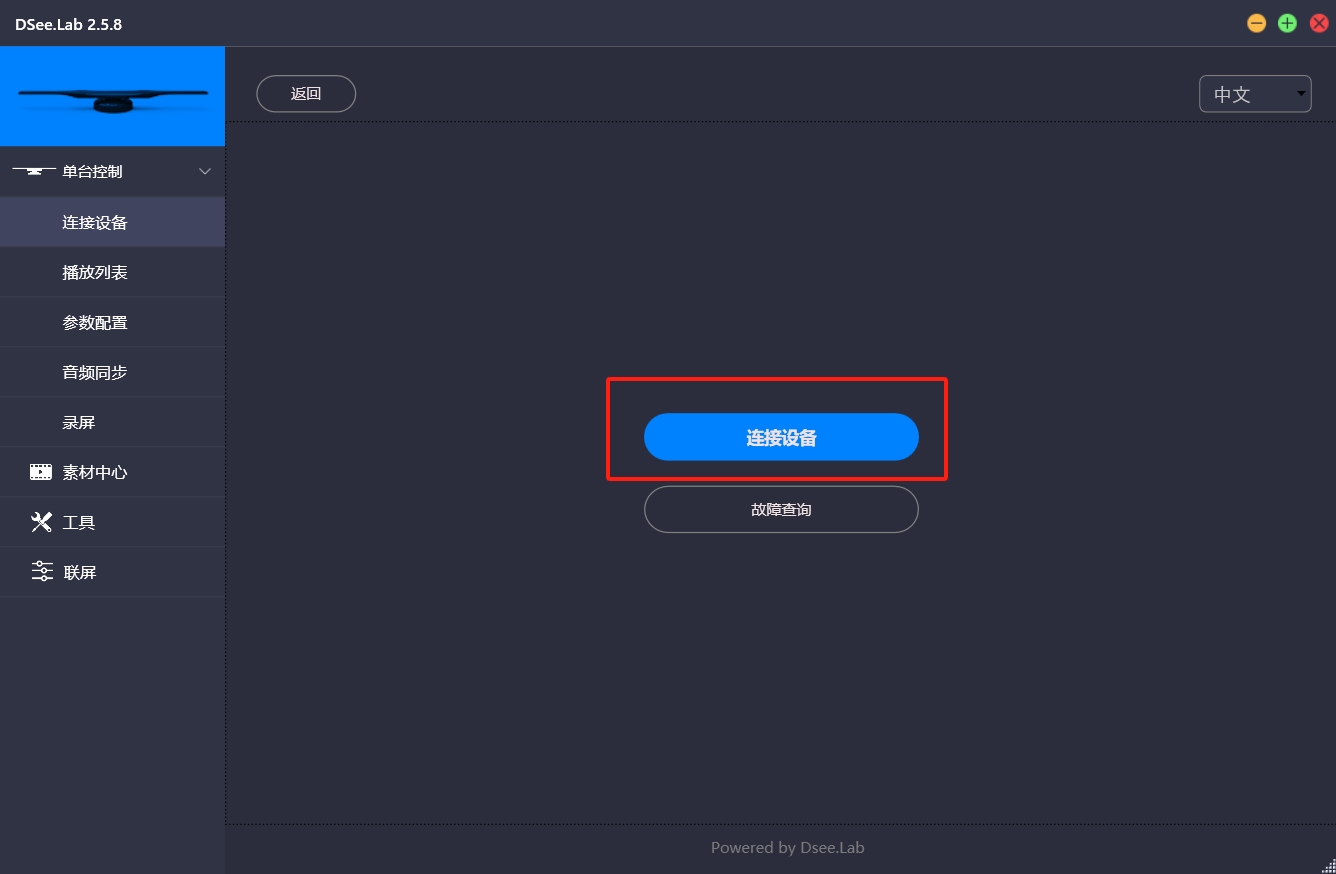
第一步:打开全息投影仪软件
 第二步:连接设备
第二步:连接设备
 第三步:默认选择设备为一般模式
第三步:默认选择设备为一般模式

第四步:添加影片
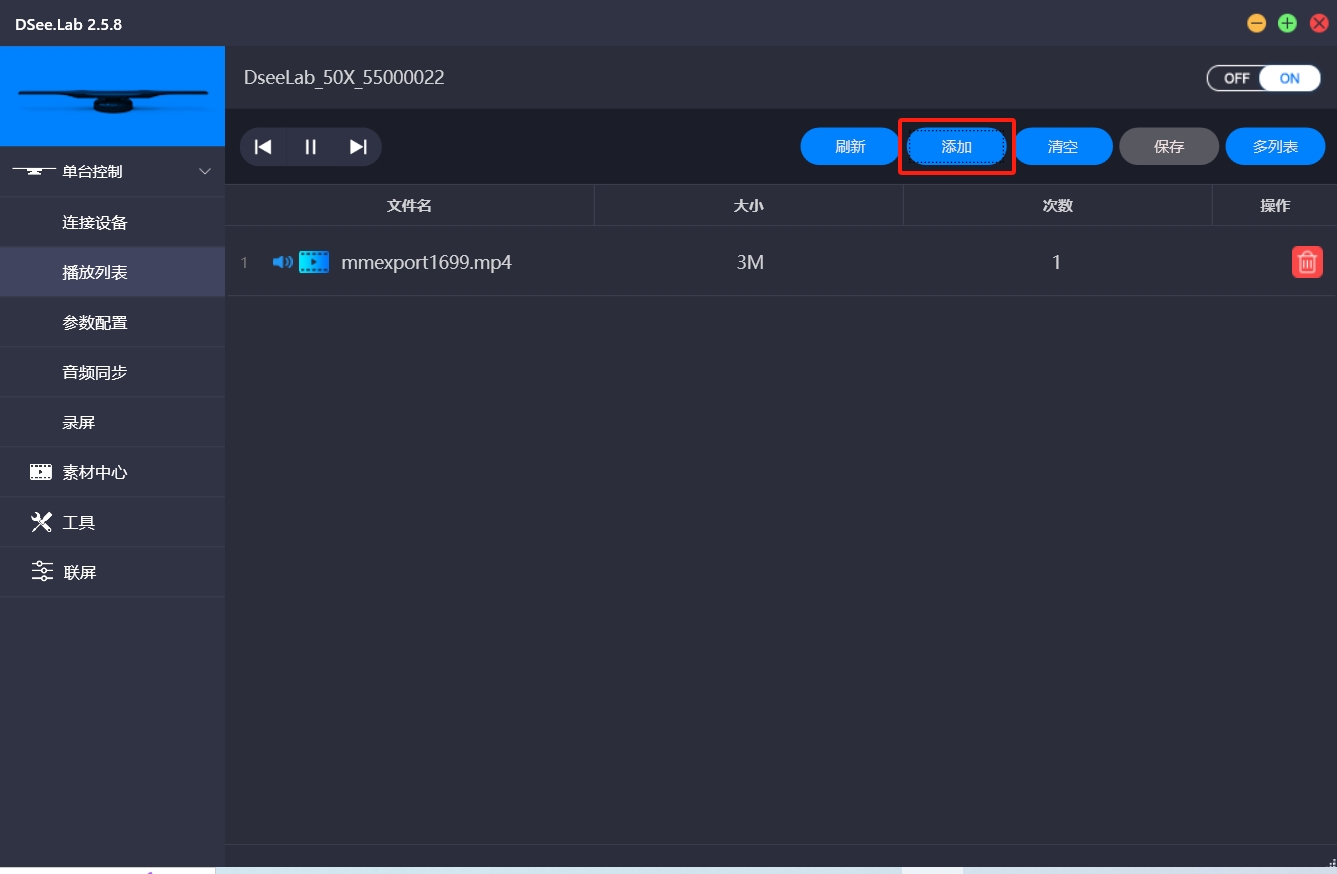 第五步:上传要放映的影片
第五步:上传要放映的影片

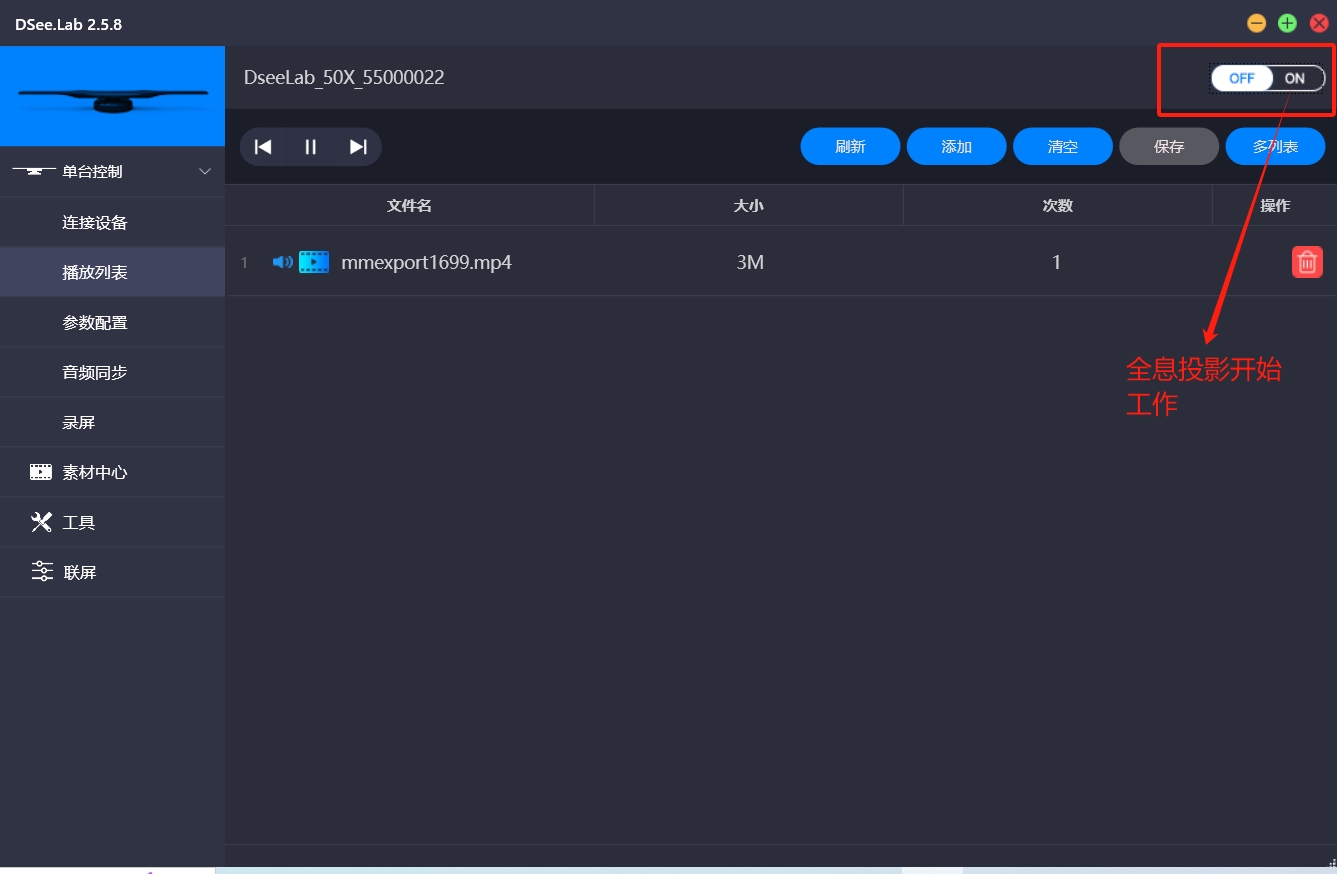
3.3 影片放映

4 注意事项
用户可以自己设置机器人点位,机械臂末端姿态统一调到下图的推荐姿态。让机械臂一边运动一边播放影片。全息投影在运行时,会高速旋转,不要随意变换机械臂末端姿态,避免机械臂本体与投影仪发生碰撞。建议在全息投影工作时,机器人周围2米内不要站人,布置上安全围栏。

