SDK 开发指南
- 1 基于 python API 开发使用 python API是大象协作型机器人给外部设备做交互控制的接口,提供了有坐标控制、角度控制、io控制、轨迹录制、夹爪控制等功能
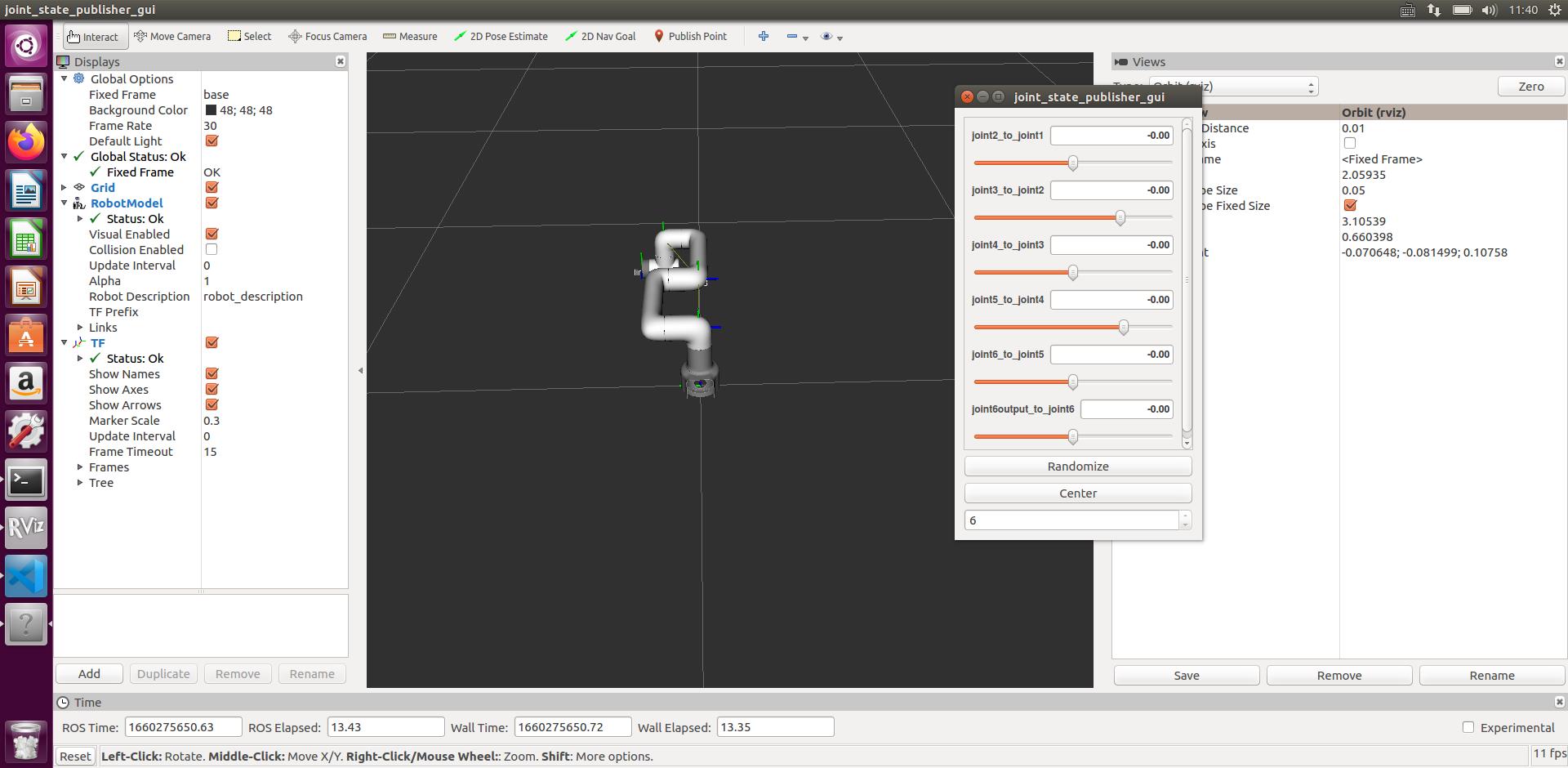
2 基于 ROS 开发使用 ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。myCobot_Pro_630自带的系统是不支持ROS的,但我们可以通过在PC端使用虚拟机中的Ubuntu系统的Socket连接使用ROS,用户在PC端安装ROS开发环境后,即可查看使用案例和moveit的使用。