Hardware question
Q: How many volts are the base IO and end IO outputs of the robot?
- A: 24V
Q: What type are the base IO and end IO outputs of the robot?
- A: PNP type, high level valid
Q: What type are the base IO and end IO inputs of the robot?
- A: NPN type, low level valid
Q: What is the maximum current of the base IO and end IO outputs of the robot?
- A: 200mA
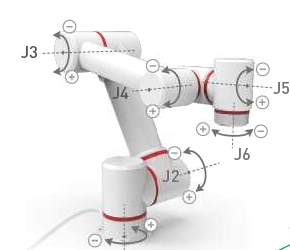
Q: The position of the robot arm is suddenly inaccurate?
- A: Use Roboflow to restore the robot arm to the joint zero position and check whether each joint is aligned with the zero position scale line. If the scale line of a joint is incorrect, it is necessary to re-calibrate the zero position
Q: The Cartesian motion of the robot arm is abnormal, and the joint motion is normal?
- A: The robot arm will have singular points when performing Cartesian motion, so it is necessary to use joint motion to adjust the robot arm to the following posture