AGVPRO自动回充导航功能使用手册
1.概述
AGVPRO的自动回充功能采用远距离NAV2导航+近距离基于红外线收发传感器的串口控制实现AGVPRO自动导航至充电桩目标点并对接入充电桩充电口实现充电。
2.充电桩位置管理,NAV2导航相对位置设置
- 充电桩位置管理:充电桩位置保存至软件包目录的
config/charger_position.json文件中,位置更新通过订阅/charger_position_update话题实现。
json文件中保存的位置信息为充电桩位置,最新的charger位置会持续发布到/goal_marker话题中并可视化,位置信息采用四元数表示如下:
{
"p_x": -0.04373347759246826,
"p_y": -4.024151802062988,
"orien_z": 0.09378381732290733,
"orien_w": 0.9955925851513477
}
NAV2导航位置设置:可以调整nav2导航的目标点相对于充电桩的位置及姿态,使小车到达目标位置及姿态后再转为串口控制。
导航点与充电桩的相对位置参数设置可以在config/nav_goal_params.yaml文件中进行配置,默认值如下:
# 导航参数配置
forward_distance: 1 # 距离充电桩前方1米
yaw_offset_deg: 10.0 # 顺时针旋转10度
3.功能使用
- 1.打开第一个终端,运行如下指令启动小车底盘驱动
ros2 launch agv_pro_bringup agv_pro_bringup.launch.py
- 2.打开第二个终端,运行如下指令驱动3D激光雷达
ros2 launch unitree_lidar_ros2 launch.py
- 3.打开第三个终端,运行如下指令转雷达点云信息为nav2导航所需的/laser_scan
ros2 launch pointcloud_to_laserscan pointcloud_to_laserscan.launch.py
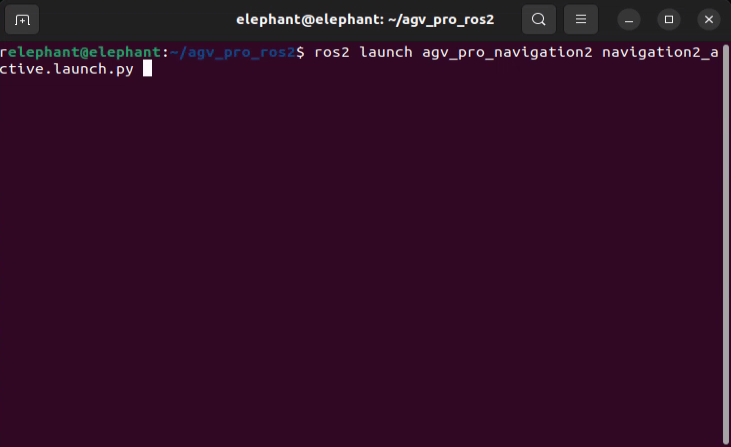
- 4.打开第四个终端,运行如下指令启动导航节点
ros2 launch agv_pro_navigation2 navigation2_active.launch.py
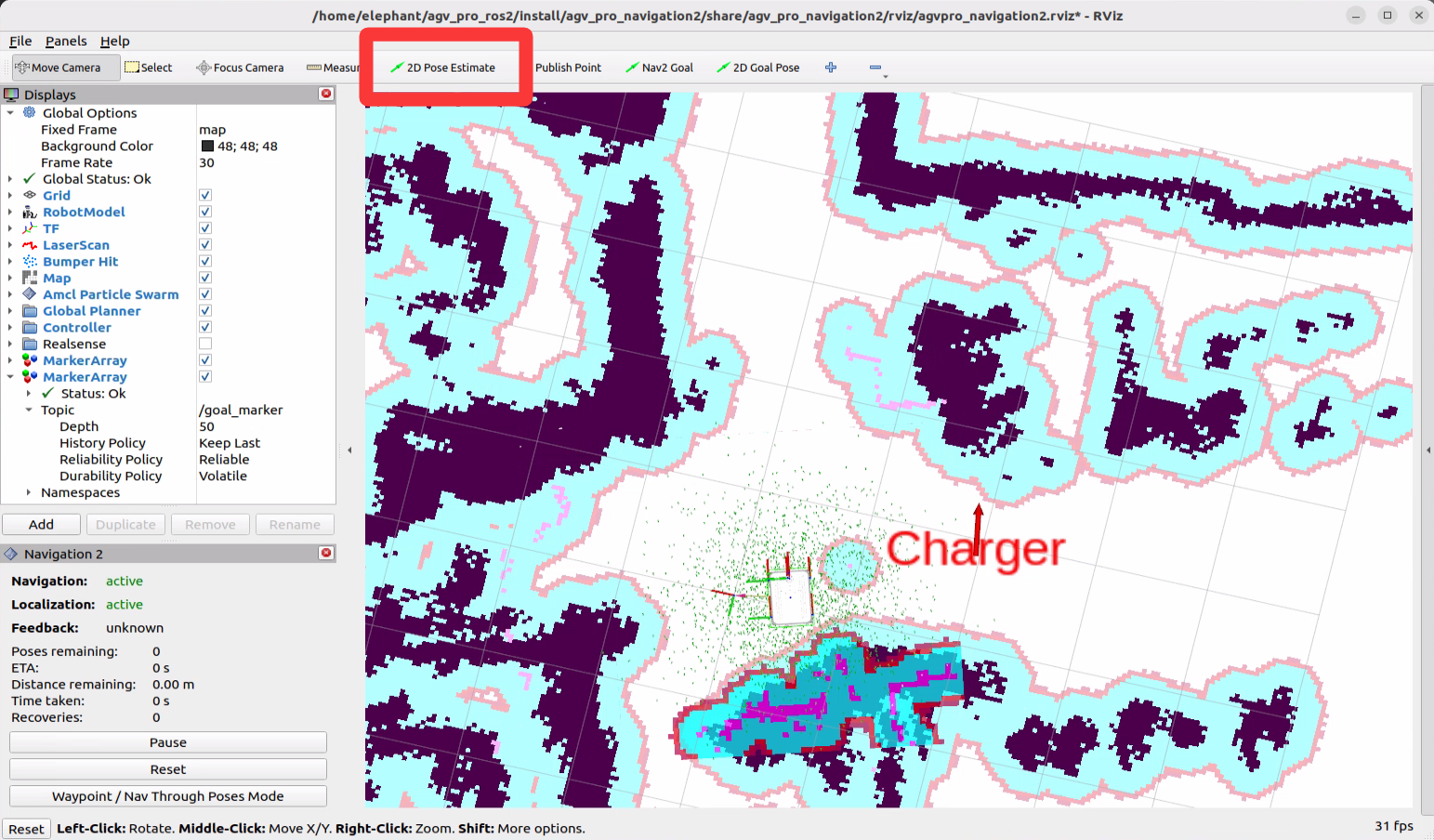
运行此指令会打开rviz2,首先使用2D Pose Estimate调整小车rviz2中的初始位置至实际位置。
- 5.打开第五个终端,运行如下指令自动回充控制节点
ros2 run agv_pro_autocharge combined_auto_recharger
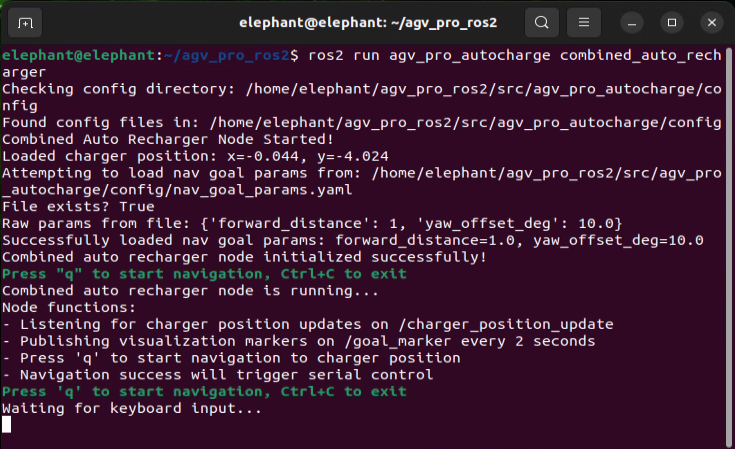
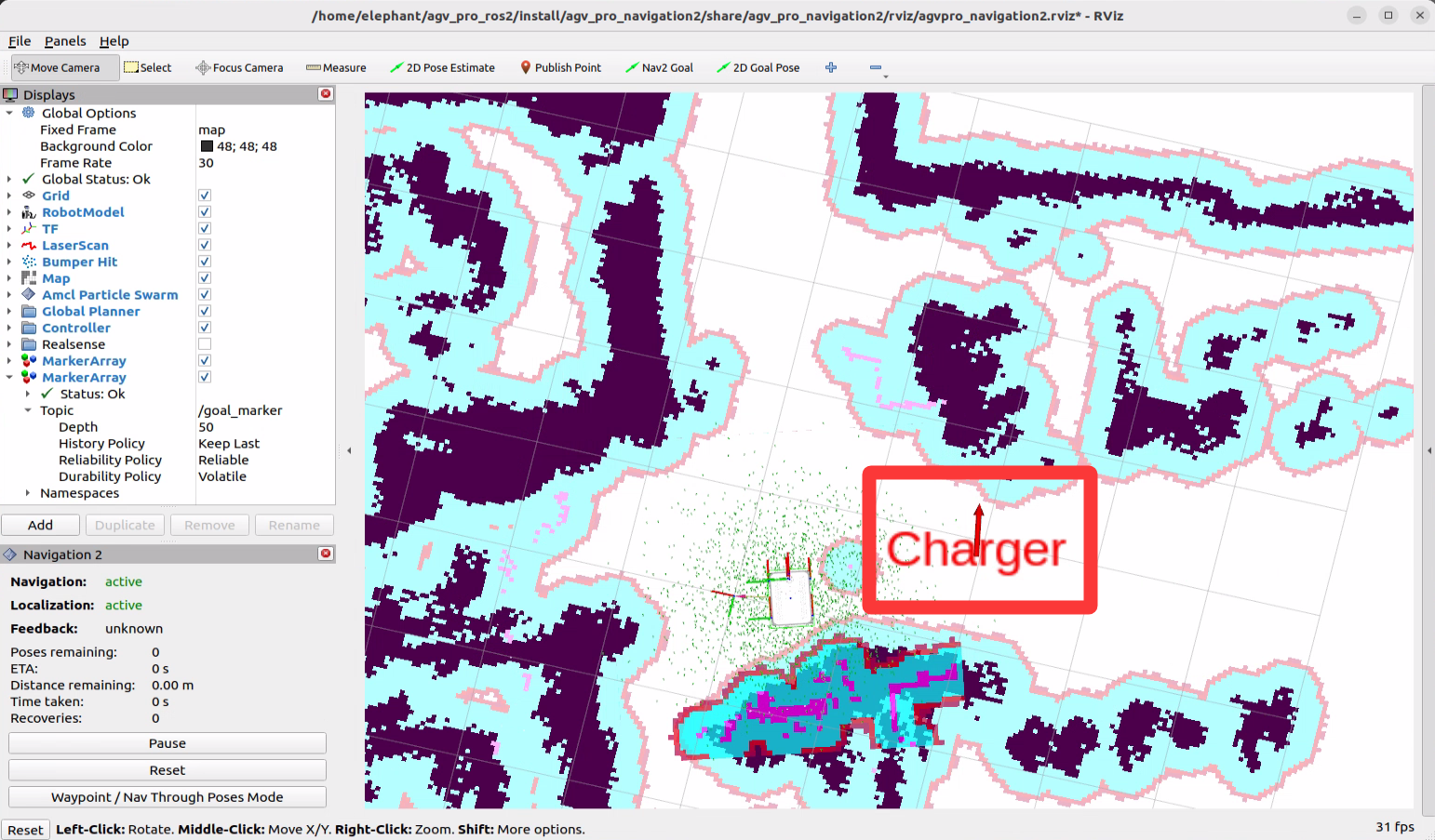
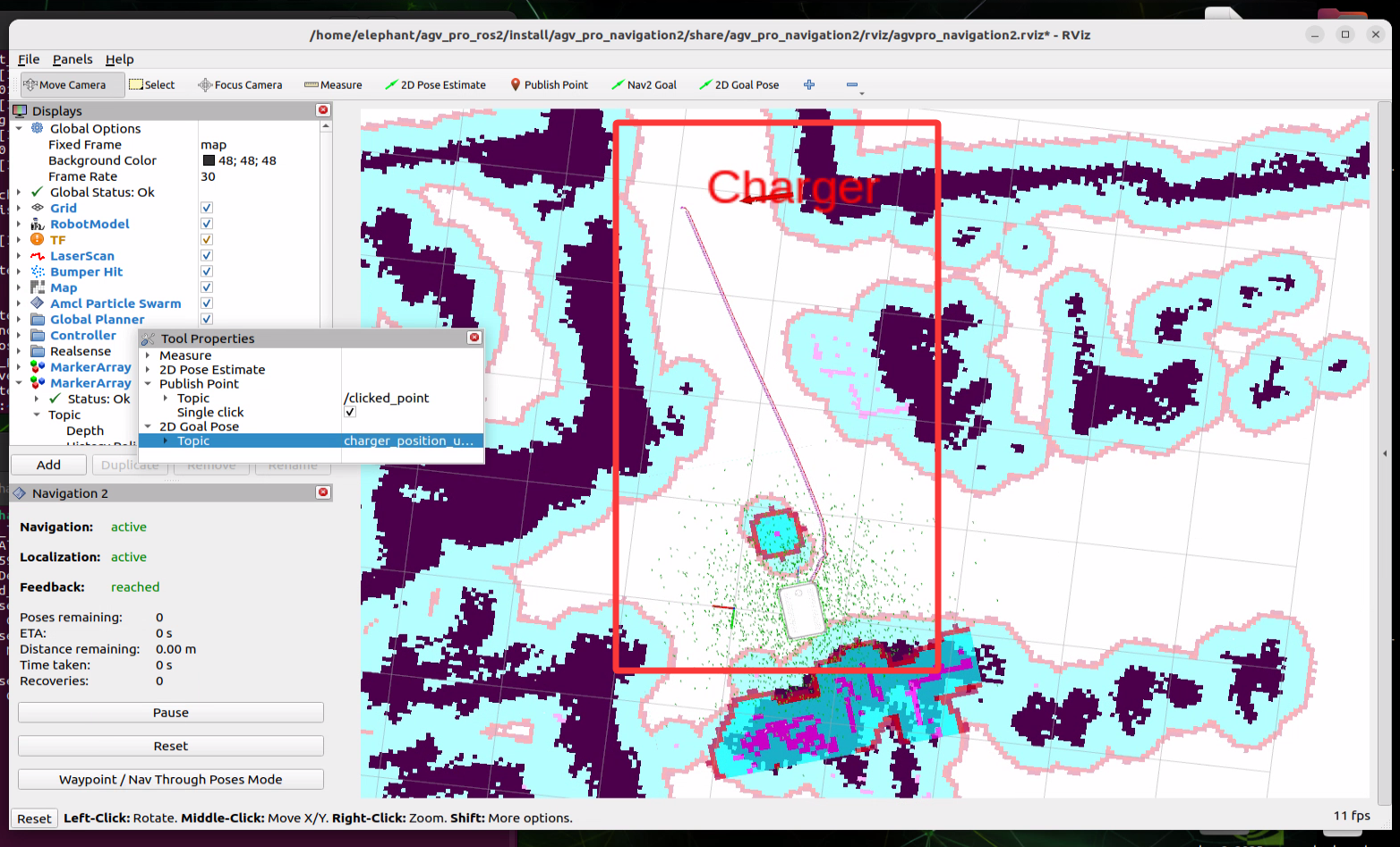
运行此指令后会看到充电桩的默认位置已经可视化到rviz2中。
注意:rviz2中会显示默认的充电桩位置,需要根据实际情况调整rviz2中的充电桩位置。具体操作方法如下:
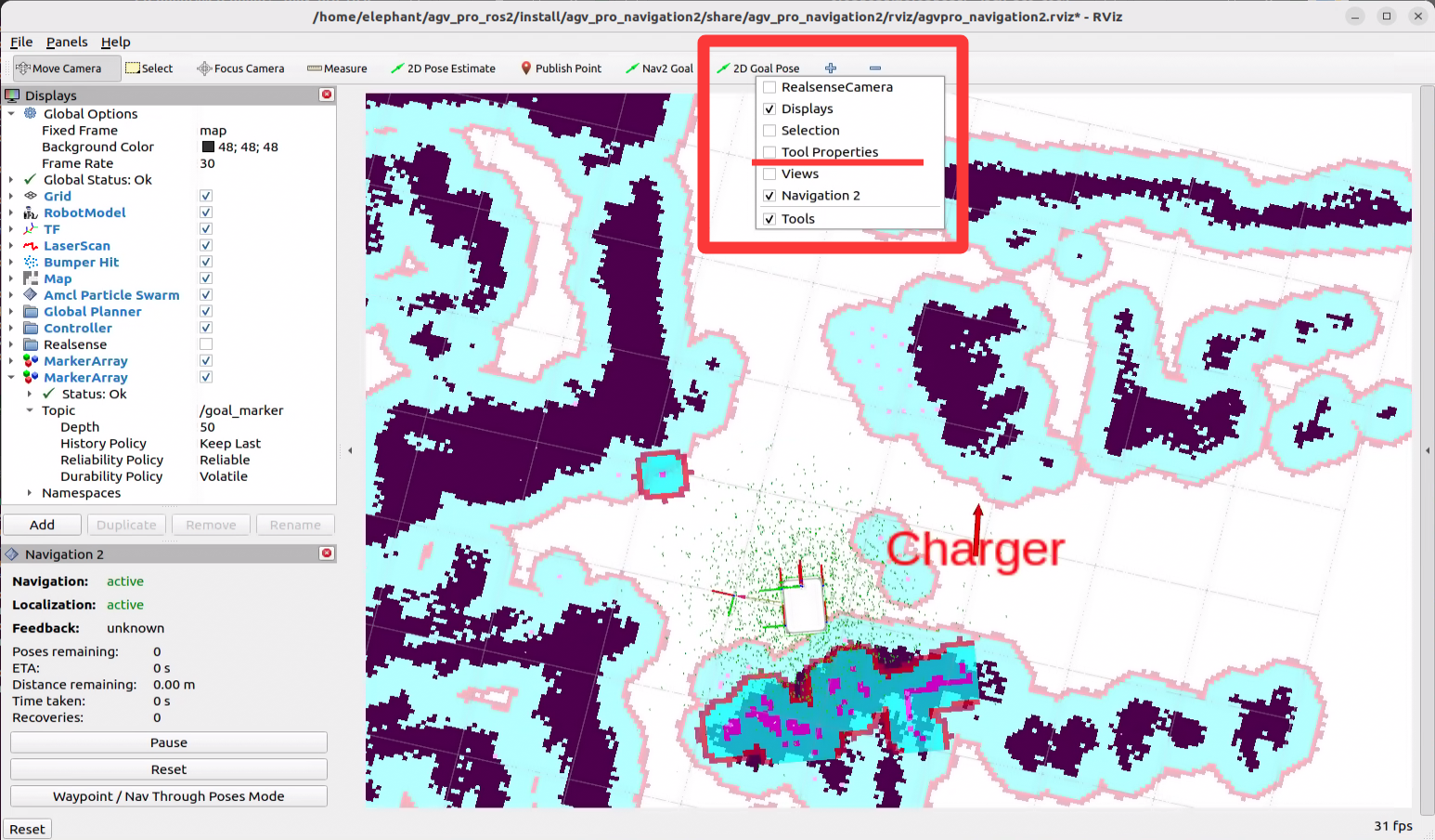
首先在rviz2菜单栏找到2D Goal Pose工具,鼠标右键打开下拉菜单,选择Tool Properties打开自定义界面
在打开的自定义界面下,找到2D Goal Pose发布的Topic,默认发布话题为/goal_pose
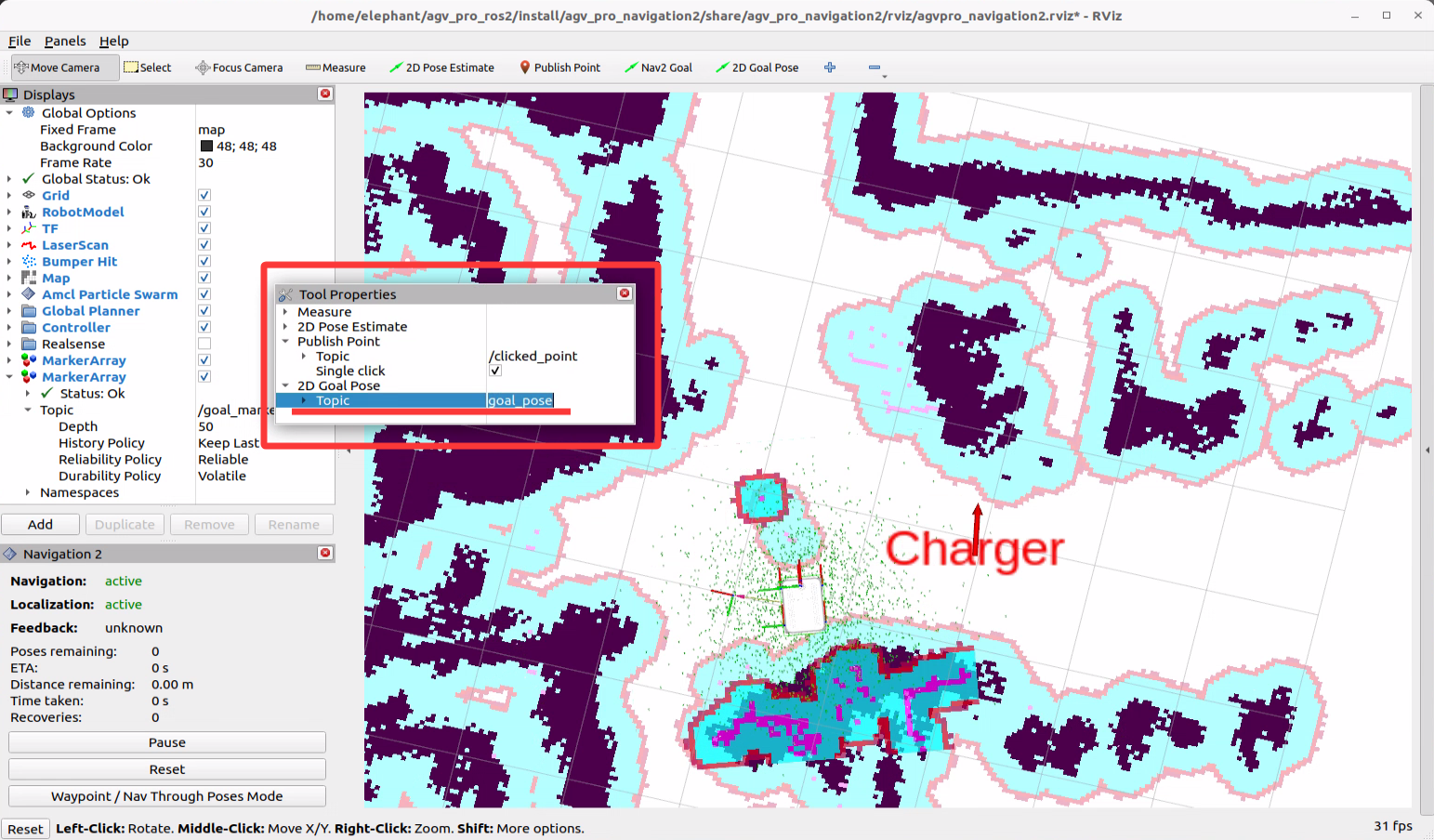
- 通过修改此话题,手动输入
/charger_position_update,再在rviz2地图中按2D Goal Pose布置箭头来发布话题(方法同2D Pose Estimate更新小车初始位置类似),这样便可以更新充电桩位置。
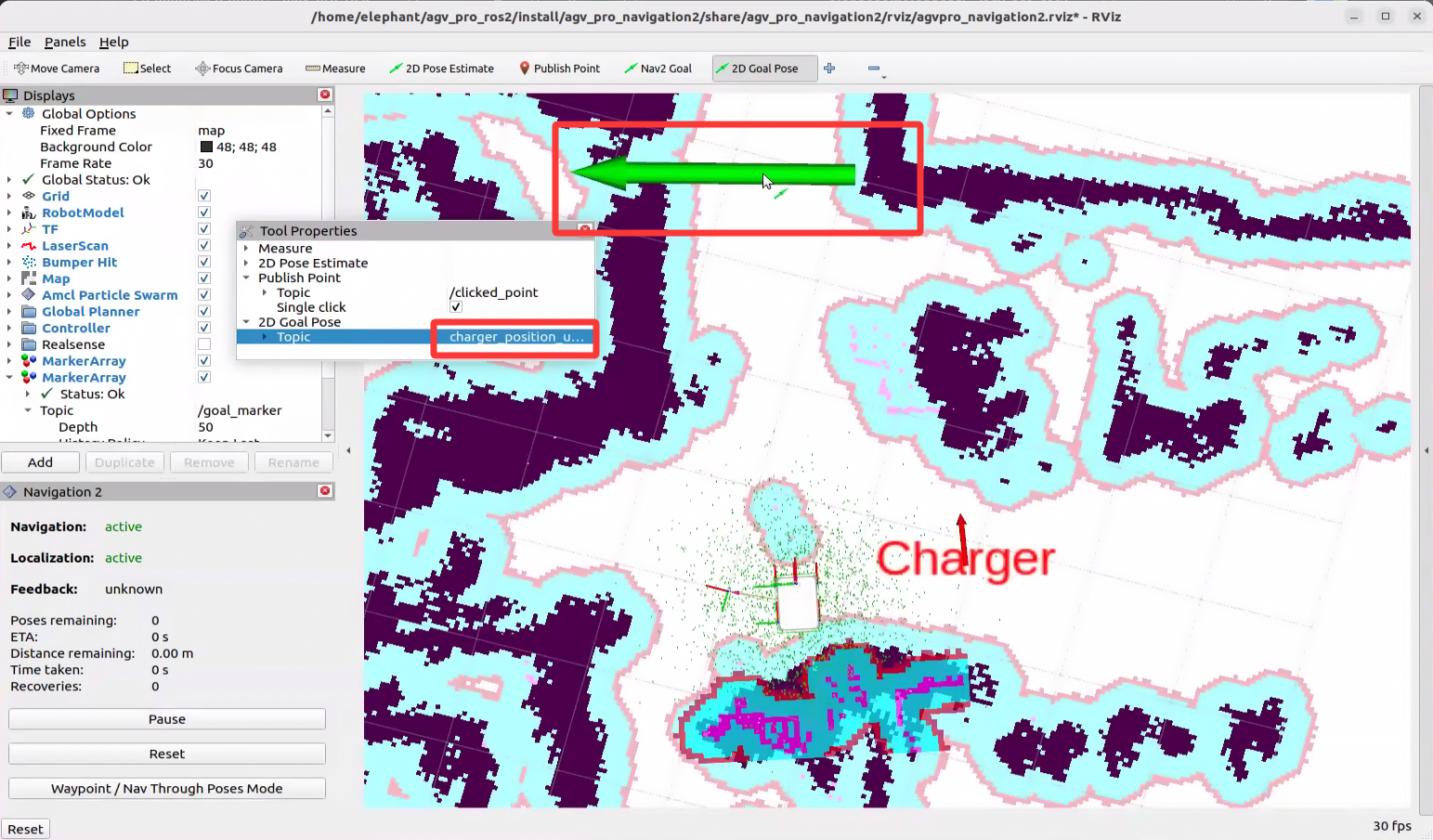
- 之后
charger位置会更新至2D Goal Pose发布的位置,最新的充电桩位置charger会持续发布到/goal_marker话题中,rviz2会自动更新显示。
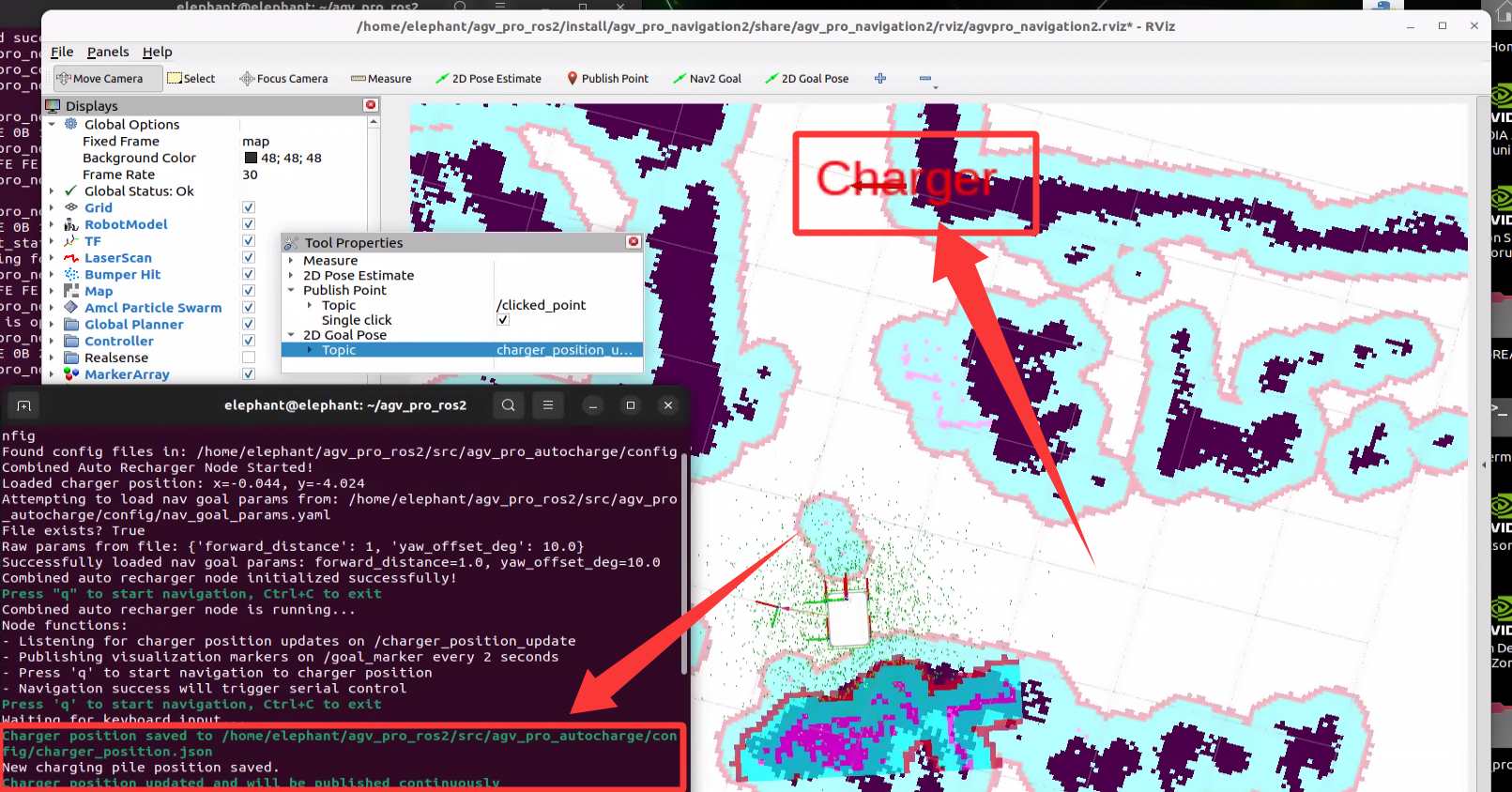
- 最新的充电桩位置会自动保存至json文件下,下次运行此程序会默认加载最后一次设置的位置。
再确定好充电桩位置及需要导航的相对位置后,就可以按下q开始自动回充。按下q键后小车会开始导航。
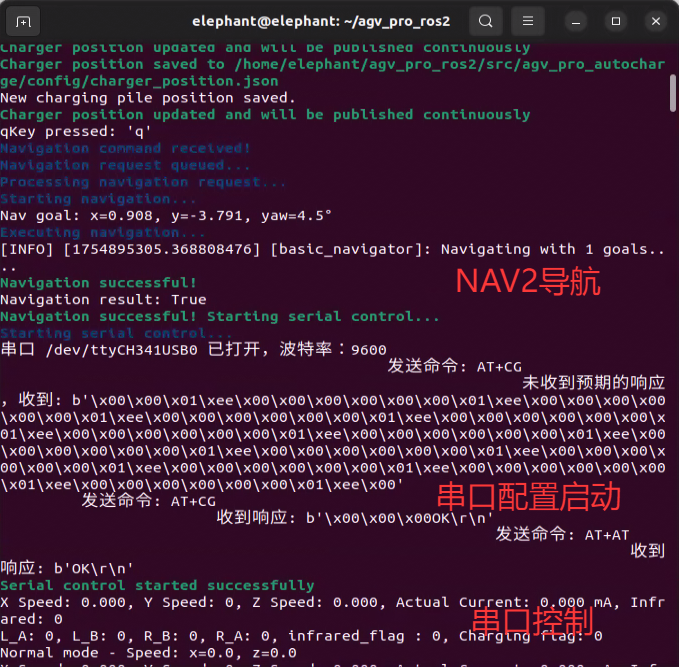
自动回充会经历两个过程:
- 导航到充电桩位置。
- 到达充电桩位置后,切换到串口控制对接充电桩。
同时终端输出如下:
小车完成自动回充,即车后方充电口与充电桩对接成功后,回充程序会自动退出。