复合机器人案例
Ranger Mini V3.0:

设备环境
Ranger mini V3.0、myCobot Pro 630、Jetson Orin nano开发板、Realsense D435i相机、2D N10P雷达
Ranger mini 3.0电气接口说明
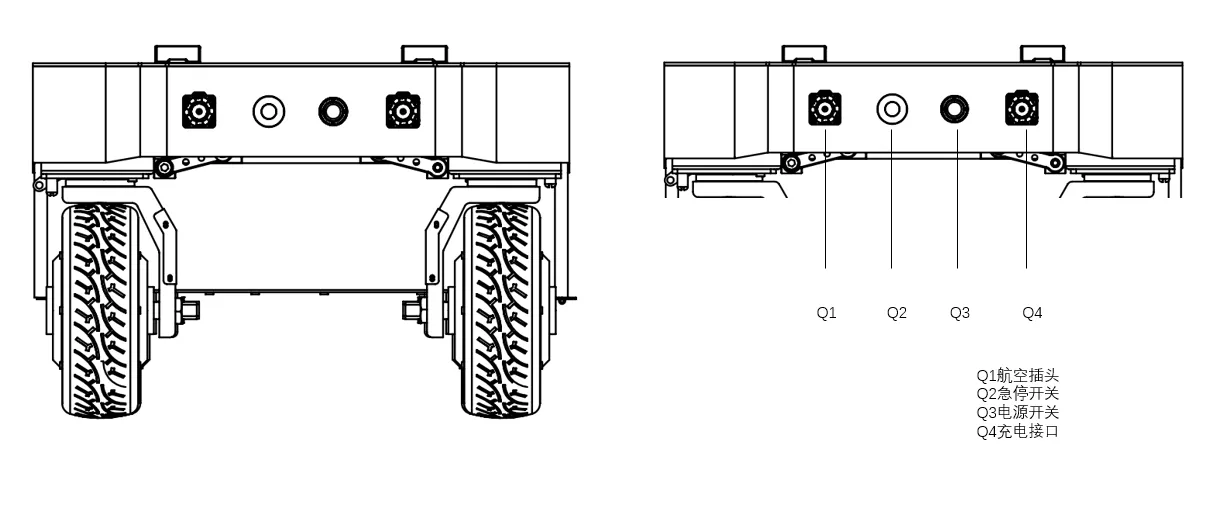
RANGER MINI 3.0 底盘尾部配置有一个航空扩展接口,航空扩展接口配置了一组电源以及一组CAN通讯接口。便于使用者给扩展设备提供电源(负载电流不能超过15A,电压范围46~50V),以及通讯使用。其具体引脚定义如下图所示。需要注意的是,这里的扩展电源受内部控制,当电池电压低于安全电压会主动切断供电,所以用户需要注意,在达到临界电压前RANGER MINI 3.0 底盘平台会通过前灯闪烁通知,用户在使用过程中注意充电。
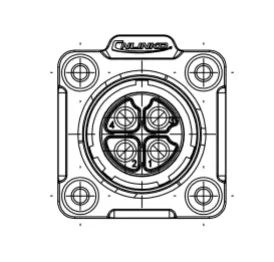
| 引脚编号 | 引脚类型 | 功能及定义 | 备注 |
|---|---|---|---|
| 1 | 电源 | VCC | 电源正,电压范围46~50V, 负载电流不能超过15A |
| 2 | 电源 | GND | 电源负 |
| 3 | CAN | CAN_H | CAN总线高 |
| 4 | CAN | CAN_L | CAN总线低 |
小车遥控功能说明
使⽤遥控器可以轻松控制RANGER MINI V3.0通⽤机器⼈底盘移动,其定义及其功能如下:

按键功能定义
SWB为控制模式选择拨杆,拨至最上方为指令控制模式,拨至中间或下方为遥控控制模式;SWA为灯光控制开关,拨到下方为关闭灯光(需SWB先进入遥控模式);SWC拨到下方为驻车模式,此时四轮四转向呈X形锁止;
SWD为底盘运动模式设置开关:SWD拨到上为①前后阿克曼和②自旋模式 ①左摇杆控制速度,右摇杆控制转角;②左摇杆不动,右摇杆左右方向控制自旋;
SWD拨到下为斜移模式: 左摇杆控制速度,右摇杆控制转角(最大角度90°即为横移);
电压/电流驱动模式切换: 需要先把 SWC 拨到下方进入驻车状态,然后SWB拨到最下,SWC再拨到最上退出驻车状态就可以切换完成
零点校准: 首先将 SWA 拨杆打到最下面;SWB 打到最上面;SWD 打到最下面; 左摇杆四个方位代表指定对应四个位置的转向电机(例如:右上指右上角转向电机,左上指的是左上角转向电机),右摇杆左右方向调节转角,左滚轮可两个方向位置累加调节SWC为调节灵敏度:DOWN→粗调MID→中间挡 UP→微调,Key1设定当前位置为零点。
任何情况下按下KEY1 = 强制清除底盘所有错误 注意!!仅在确保安全的特殊情况下可使用
POWER为电源按钮,同时按住即可开机 。
遥控控制基本操作流程
启动之前需要确保 RANGERMINI 的轮子和底盘平行朝着正前方,正常启动RANGERMINI 3.0 移动机器人底盘后(尾部有电源开关按钮,按下打开电源启动小车),启动遥控器,将SWB切换为遥控控制模式,即可通过遥控器控制RANGERMINI平台运动。
注意:使用遥控器摇杆进行操作时,需缓慢轻推摇杆,避免速度过快。当小车顶部有载重时,速度过快容易出现重心不稳,影响运动控制的平稳性。
硬件连接
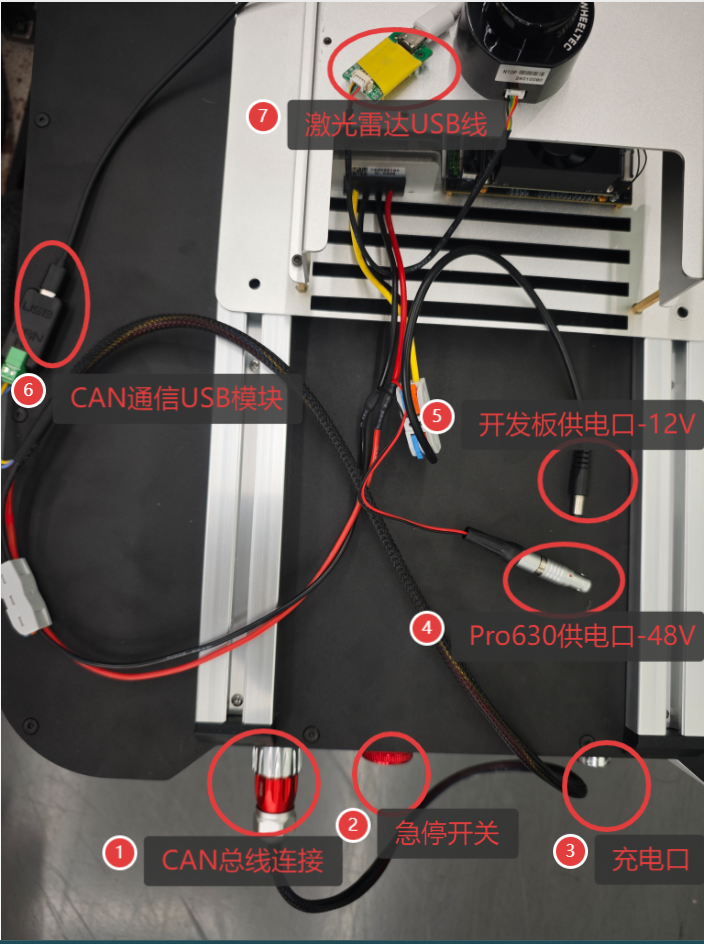
小车CAN总线连接
- 将顶部航空插头或者尾部插头CAN线引出,将CAN线中的CAN_H和CAN_L分别与CAN_TO_USB适配器相连;
- 打开移动机器人底盘旋钮开关,检查来两侧的急停开关是否释放;
- 将CAN_TO_USB连接至笔记本的usb口。连接示意如图所示。

整体连接说明
安装依赖包
sudo apt-get update
sudo apt-get install build-essential git cmake libasio-dev libpcap-dev libboost-all-dev
sudo apt install ros-noetic-joint-state-publisher-gui -y
sudo apt install ros-noetic-ros-controllers -y
sudo apt install ros-noetic-gmapping -y
sudo apt install ros-noetic-map-server -y
sudo apt install ros-noetic-navigation -y
下载程序代码
cd ~/catkin_ws/src
git clone -b ranger_mini3.0 https://github.com/elephantrobotics/mc_embodied_kit_ros.git
cd ..
catkin_make
soure devel/setup.bash
雷达串口映射
cd ~/catkin_ws/src/mc_embodied_kit_ros
sudo chmod +x wheeltec_udev.sh
sudo ./wheeltec_udev.sh
执行执行成功之后,重新拔插设备,输入下面命令验证:
ls -l /dev/wheeltec_lidar
若提示没有该设备名称,则查看 /etc/udev/rules.d/目录下是否有相对应的规则文件(wheeltec_lidar*.rules)
测试CAN通信
- 为确保CAN总线使能,每次打开电源、系统重启都需要运行此命令:
cd ~/catkin_ws && source devel/setup.bash
rosrun ranger_bringup setup_can2usb.bash
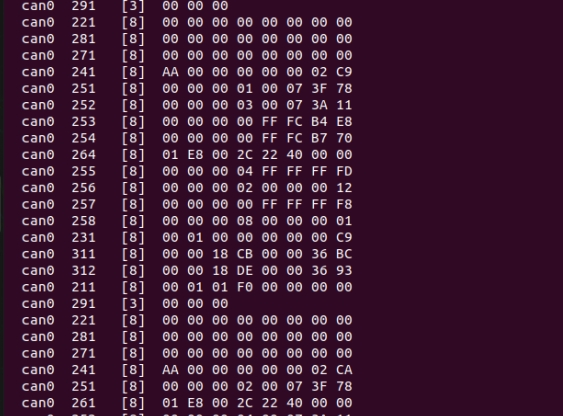
- 如果已经将can-to-usb连接到小车,并且小车已经开机、CAN总线已经使能、使用以下命令监控TRACER底盘的数据:
candump can0
若底盘数据正常,终端会一直输出如下数据:
雷达建图导航
1 CAN总线使能
为确保CAN总线使能,每次打开电源、系统重启都需要运行此命令:
cd ~/catkin_ws && source devel/setup.bash
rosrun ranger_bringup setup_can2usb.bash
2 启动小车底层通信
启动小车底层节点和雷达通信,打开一个终端,运行以下命令:
cd ~/catkin_ws && source devel/setup.bash
roslaunch ranger_odometry ranger_active.launch
注意: 启动底盘节点前需确保CAN总线已经使能,系统重启或者重新拔插CAN总线,都需要执行使能指令: rosrun ranger_bringup setup_can2usb.bash
3 运行建图程序
打开一个终端,运行以下命令:
cd ~/catkin_ws && source devel/setup.bash
roslaunch ranger_navigation mapping.launch
3 开始建图
现在,底盘小车可以在手柄的遥控下移动了。同时,您可以在 Rviz 空间中观察到,随着小车的移动,我们的地图也在逐渐构建。
注意:为了获得更好的地图绘制效果,建议在操作手柄遥控器时缓慢推动摇杆并以低速行驶,因为较低的速度往往会产生更好的地图绘制效果。
4 保存构建地图
打开另一个新的终端控制台,在命令行中输入以下命令,保存 ranger 扫描的地图:
cd ~/catkin_ws/src/mc_embodied_kit_ros/ranger_navigation/map
rosrun map_server map_saver
执行成功后,将在当前路径(~/catkin_ws/src/mc_embodied_kit_ros/ranger_navigation/map)下生成两个默认地图参数文件,即map.pgm和map.yaml。
5 地图导航+PRO630运动
注意:开始导航之前,建议将小车的初始位置放在绘制地图时小车所在的起点位置。
在此之前,我们已经成功创建了空间地图,并获得了一组地图文件,即位于 ~/catkin_ws/src/mc_embodied_kit_ros/ranger_navigation/map 目录下的 map.pgm 和 map.yaml。
5.1 启动小车底层通信
注意:若已启动,请忽略此操作
启动小车底层节点和雷达通信,打开一个终端,运行以下命令:
cd ~/catkin_ws && source devel/setup.bash
roslaunch ranger_odometry ranger_active.launch
5.2 启动导航程序
打开一个终端,输入以下命令运行:
cd ~/catkin_ws && source devel/setup.bash
roslaunch ranger_navigation navigation_active.launch
程序启动成功之后,可以在rviz界面进行导航操作,小车从A点移动到B点,myCobot Pro 630执行相关动作,效果demo如下:
Realsense 3D相机使用
依赖库安装
注册服务器的公钥:
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE将服务器添加到存储库列表中:
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u安装SDK:
sudo apt-get install librealsense2-utils librealsense2-dev
验证使用
打开控制台终端,输入以下命令:
realsense-viewer
更多使用详情请参考:Jetson Installation Guide