夹爪的使用
开始之前
1、确保机器已上电
2、确保机器连接正常
3、服务端已开启
本章介绍如何使用blockly控制连接机械臂的Pro力控夹爪。
API display
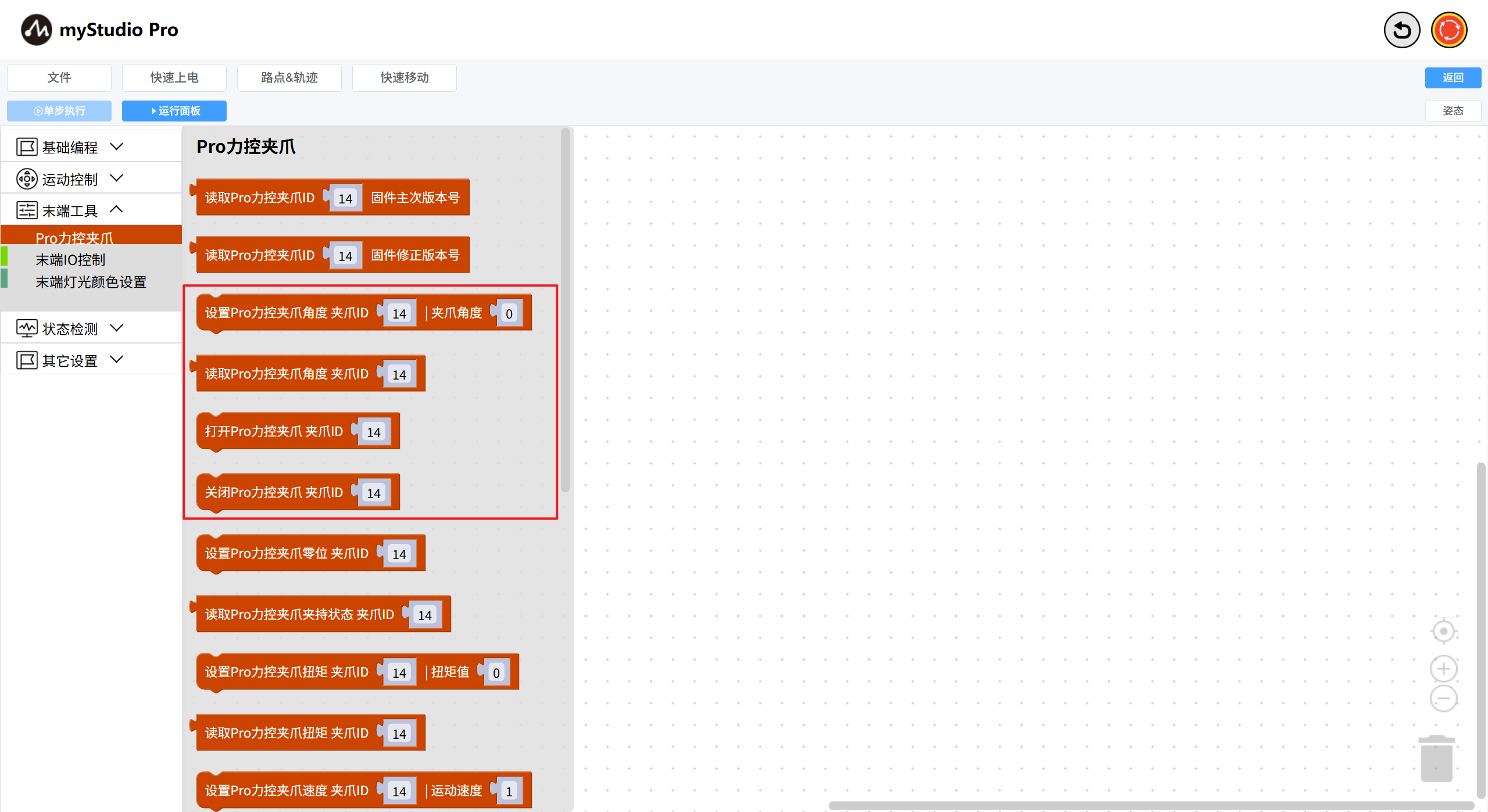
我们将用到以下积木块
1: 设置Pro力控夹爪角度:使夹爪以指定的角度进入指定的状态(张开或闭合)
参数介绍:
该积木块有两个可以调整的参数:
- 夹爪ID参数:默认14
- 夹爪角度参数:表示需要设置的角度,取值范围0~100
2: 读取Pro力控夹爪角度:读取当前夹爪的角度值
该积木块有一个可以调整的参数:
- 夹爪ID参数:默认14
小案例
图形代码如下:
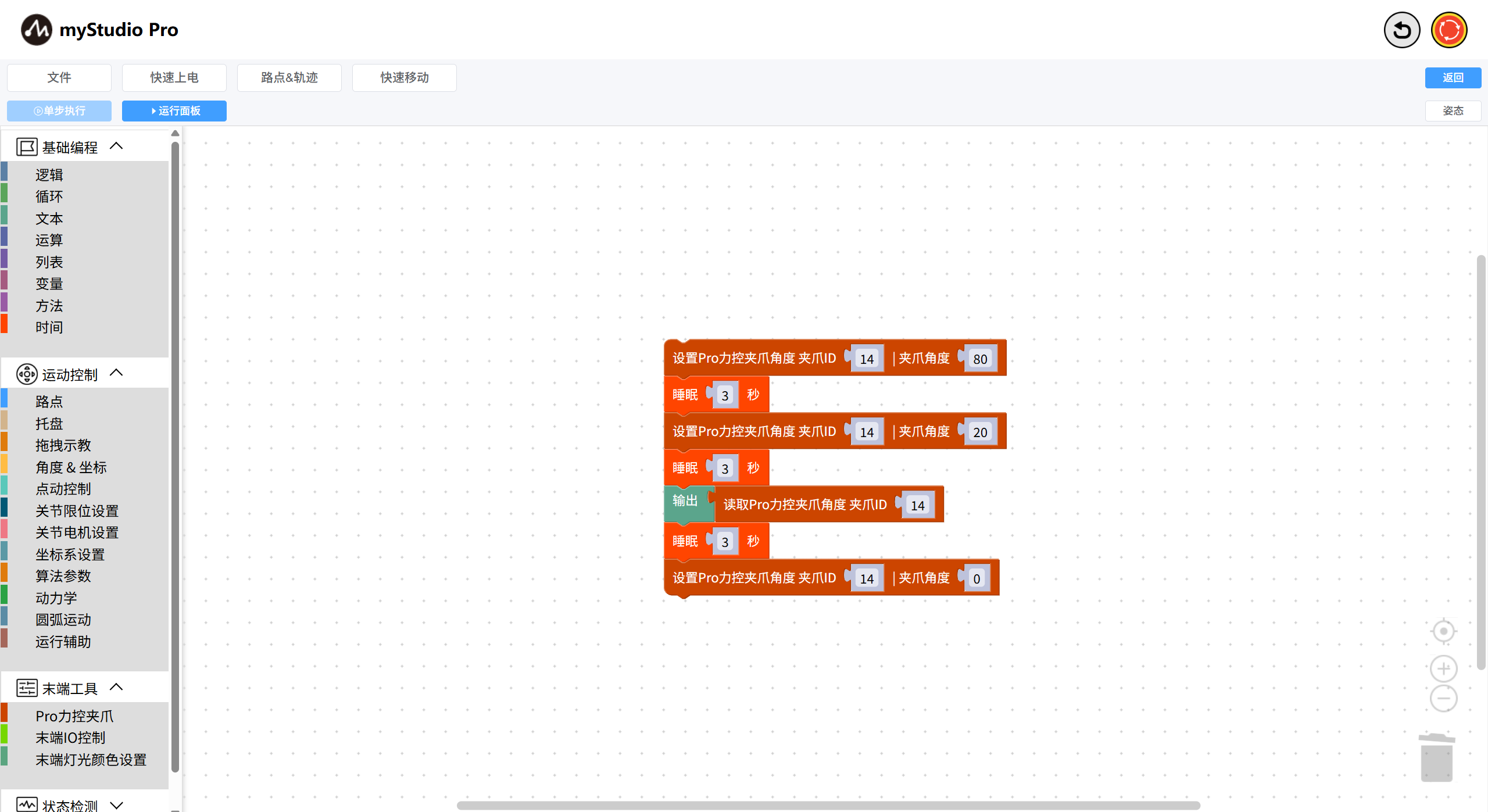
- 代码的执行效果:
- 控制Pro力控夹爪到达值为
80的位置
- 控制Pro力控夹爪到达值为
- 等待 3 秒
- 控制Pro力控夹爪到达值为
20的位置
- 控制Pro力控夹爪到达值为
- 等待 3 秒
- 读取当前Pro力控夹爪的角度值
- 等待 3 秒
- 控制Pro力控夹爪到达值为
0的位置
- 控制Pro力控夹爪到达值为
注意:
如果您无法从以上的示例中控制夹爪,请确保您的Pro力控夹爪通信方式是modbus协议控制。
设置完成后,然后再次运行小案例代码。