开机检测指南
1. 首次使用自查
注意: 在开箱后,用户取出机器臂后请水平放置在承重至少大于机械臂自重 3 倍的桌面上,机器臂的正确姿态如下:

2. 结构安装和固定
在 机械臂 的运动过程中,如果不将 myCobot 的底面与桌面或其他底面相连,仍然会造成 myCobot 的 摇晃或倾覆。
1.在开始组装之前,请清理工作台,并准备好需要用到的工具。
工作环境:水平放置在承重至少大于机械臂自重 3 倍的桌面上且不小于机械臂的工作范围,并有足够的安装、使用、维护和修理空间。 工具清单:mycobot pro 450 机械臂主体、产品配件包、产品使用指南等。
2.把机器臂平放在桌面上并正向放到桌面边,用G型夹固定。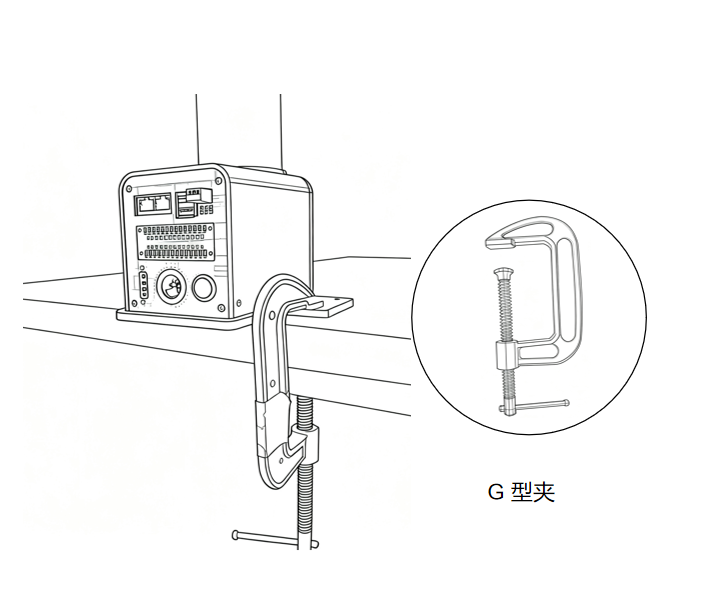
3.机器臂发货到用户手里是已经安装完底板的,如用户需要拆卸或更换其他底板,可参考以下视频进行操作:
注意:myCobot 底座的螺丝孔位连接
需要将机器人固定在牢固机座上才可以正常使用。机座要求:固定式机座或移动式机座。
请确定固定底座上有对应螺纹孔位,再进行安装。
正式进行安装前,请确认:
- 待安装环境符合以上《工作环境与条件》表格的要求。
- 安装位置不小于机器人工作范围,且留有足够大的安装、使用、维护、维修的空间。
- 将机座放置到合适位置。
- 安装相关工具已准备好,如螺丝、扳手等。 确认以上内容后,请将机器人搬运至机座安装台面上,调整机器人位置,将机器人基座固定孔位与机座安装台面上的孔位对准。对准孔位后,将螺丝对准孔位,拧紧即可。
**注意:在机座安装台面上调整机器人位置时,请尽量避免在机座安装台面上直接推拉机器人,以免产生划痕。人工移动机器人时请尽量避免对机器人本体脆弱部分施加外力,以免造成机器人不必要的损伤。
4.结构安装完成后,方可进行下一步的电源连接。
3. 外部线缆连接
准备工具:已安装好底座安装台的mycobot pro 450 机械臂、DC24V 直流电源、急停按钮等。
注意:
- 请确认您已完成上述的结构安装,并将机械臂底座固定在桌面上,以确保操作安全。
- 请按照下列图示流程,将电源适配器与机械臂上对应的接口进行连接:
步骤 1: 将直流电源(请确保使用官方适配器,或者DC24V15A 以上供电能力的直流电源)与mycobot pro 450 机械臂上对应的DC 圆形接口相连,适配器另一端链接110-220V电源插座。

步骤 2: 将急停按钮与mycobot pro 450 机械臂上对应的接口相连。

步骤 3: 将mycobot pro 450机械臂上对应的LAN1接口与上位机相连。

注意:
- mycobot pro 450必须使用外部电源供电,以提供足够的电力
- 额定电压:24V
- 额定电流:10A
- 插头类型: DC24V MIC4(NEUTRIK XLR NC4FX equivalent)
4. 开机状态展示
首先,我们最后确认一下,所有必要的线缆都已经插好,并且接口是紧固的。
确认无误后,现在请您按下这个【电源开关】。

开机后,您会看到几个正常的现象:
电源按钮会亮起一圈绿色的灯光,表示供电正常。

LAN1接口会闪烁黄色的光,表示网络在初始化。

同时,这个小屏幕会先展示我们的Logo,大约3秒钟,然后就会自动跳到显示各个关节角度的主页面。

5. MiniRobot介绍
主界面功能说明
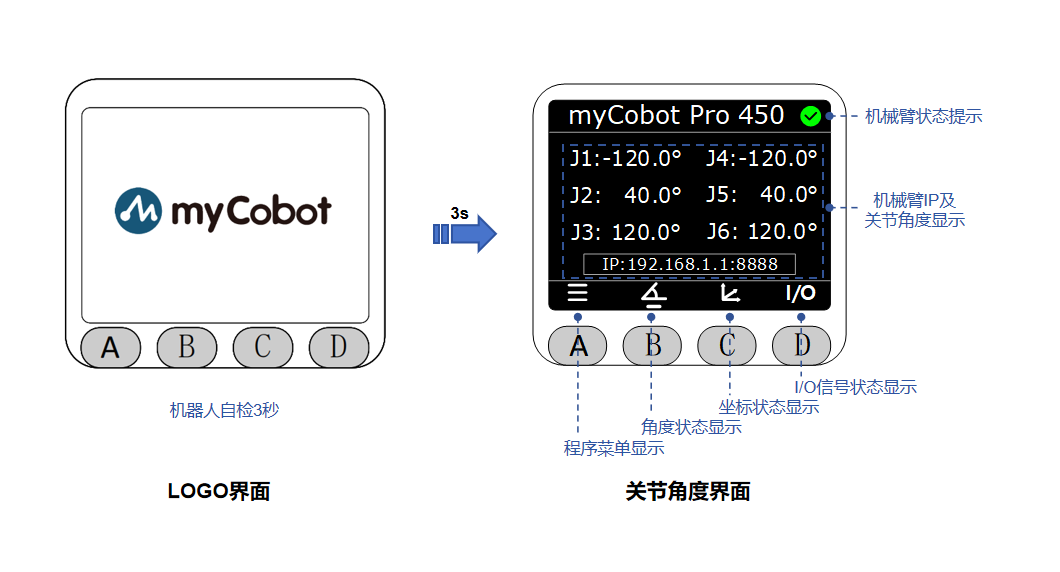
按键说明:开机后机器人会自检3秒且默认进入主界面,可实时查看机械臂坐标;通过下方按键可切换至其他功能界面。界面下方横线标识当前所在界面。
菜单界面功能说明
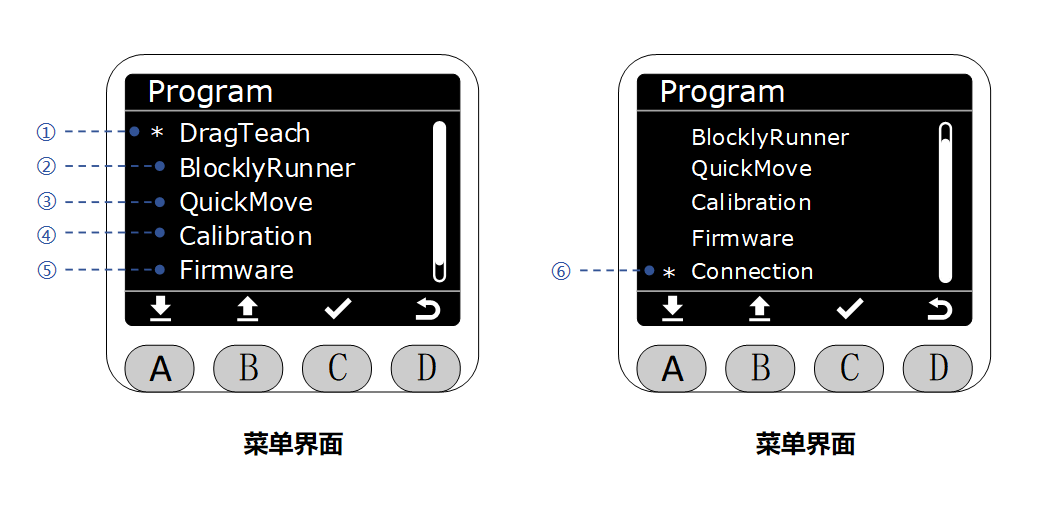
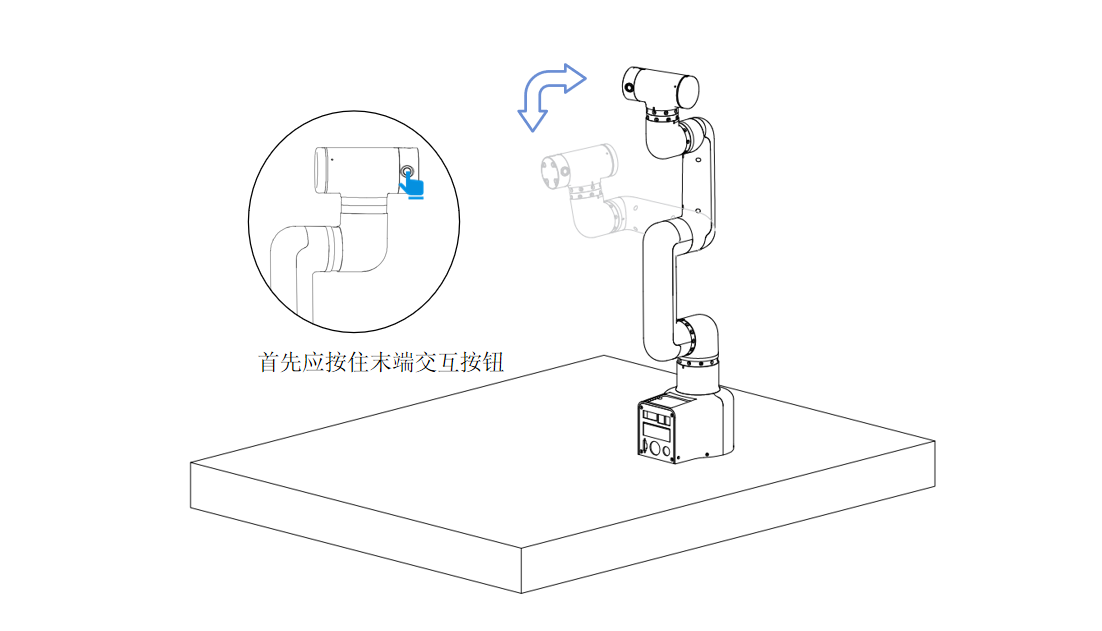
- ①拖拽示教:按住末端交互按钮即可自由拖动机械臂,支持轨迹记录与回放。
- ②Blockly运行器:可选择播放已保存的路点文件。
- ③快速移动:提供自由移动与点动移动两种快速移动模式。
- ④校准:提供逐关节自动校准和逐关节手动校准两种模式。
- ⑤固件信息:可查看机器人ID、屏幕驱动、固件系统版本。
- ⑥连接:支持查看LAN1、LAN2、WLAN三种接口配置信息。
6. 基础功能检测
记录轨迹

注意: 存入 RAM 为临时保存,断电后数据将会丢失;存入 Flash 可长期保存,断电数据不会丢失。
拖动机器臂
在记录轨迹步骤3中,用户可以自由拖动机械臂形成任意姿态(不可超过机械臂关节范围)并记录轨迹,下图为举例示范:
播放轨迹
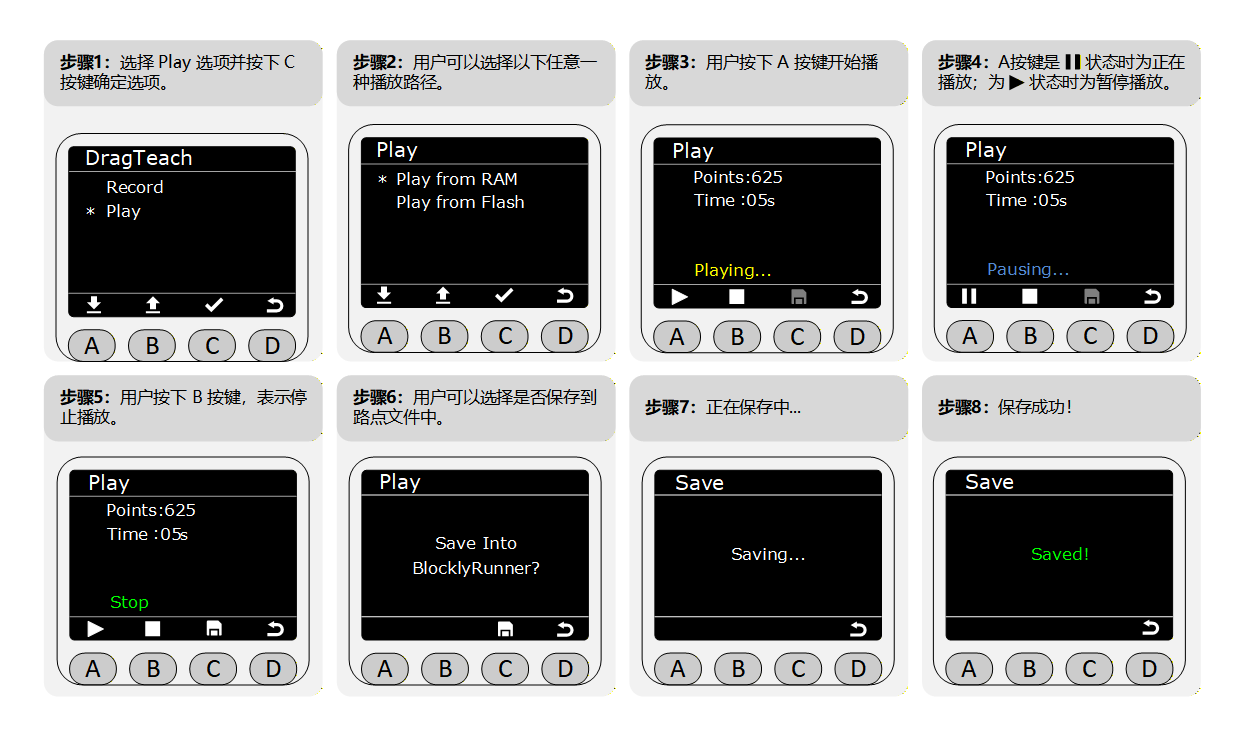
注意: 若在点击轨迹播放操作之前并未进行记录轨迹操作时,可能会出现如下图的警告界面,用户只需返回到菜单页面并进行上述记录轨迹操作步骤即可。

7. 夹爪安装及使用
以myCobot Pro 450机器臂为例,以下是机器臂与夹爪的安装及小案例的教学视频。
注意:
!连接夹爪时不支持热插拔,操作前需确保机械臂已关闭动力电源并掉使能,避免因带电操作导致设备损坏或安全隐患。
请尽可能详细描述下使用细节,如果方便的话请提供一个操作视频,这将会有助于快速分析定位问题,提前感谢!