使用前准备
在使用 Python API 之前,请先确认以下硬件和环境准备齐全:
硬件设备
- MyCobot Pro 450 机械臂
- 网线(用于连接机械臂与电脑)
- 电源适配器
- 急停开关(确保安全操作)
软件与环境
- 已安装 Python 3.6 及以上版本
- 已安装
pymycobot库(通过pip install pymycobot终端命令安装) - 确保 MyCobot Pro 450 已正确接通电源,并处于待机状态
- 注意:Pro 450 服务端会在设备上电后自动启动,无需手动操作
网络配置
- MyCobot Pro 450 默认 IP 地址:
192.168.0.232 - 默认端口号:
4500 - 注意:PC 端需要将本机网卡 IP 设置为 同一网段(例如
192.168.0.xxx,xxx为 2~254 之间的任意数,且不能与机械臂冲突)。 - 具体配置方式请查看 静态IP配置 章节内容。
示例:
- 机械臂 IP:
192.168.0.232 - PC IP:
192.168.0.100 - 子网掩码:
255.255.255.0 - DNS服务器:
114.114.114.114
- 机械臂 IP:
验证:完成网络配置后,可在 PC 终端执行以下命令,若能成功返回数据包,则说明网络连接正常:
ping 192.168.0.232
- MyCobot Pro 450 默认 IP 地址:
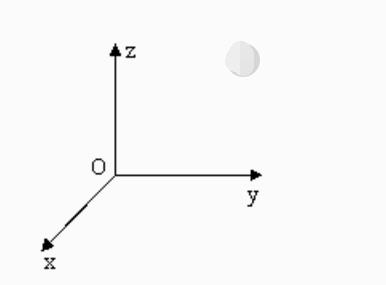
坐标控制
主要用于实现智能规划路线让机械臂从一个位置到另一个指定位置。分为[x,y,z,rx,ry,rz],其中[x,y,z]表示的是机械臂头部在空间中的位置(该坐标系为直角坐标系),[rx,ry,rz]表示的是机械臂头部在该点的姿态(该坐标系为欧拉坐标)。算法的实现以及欧拉坐标的表示需要一定的学术知识,这里不对其过多的讲解,我们只要懂得直角坐标系就可以很好的使用这个函数了。
注意: 在设置坐标时,不同系列的机械臂关节构造有所不同,同一组坐标,不同系列的机械臂会展示不同的姿态。
案例使用
import time
from pymycobot import Pro450Client
pro450 = Pro450Client('192.168.0.232', 4500) # 客户端连接通信
if pro450.is_power_on() !=1:
pro450.power_on() # 上电
print(pro450.get_coords()) # 读取坐标姿态信息
pro450.send_angles([0, -10, -123, 45, 0, 0], 50) # 发送角运动到某一姿态以进行坐标控制,速度为 50
time.sleep(3)
pro450.send_coord(1, 200, 50) # 发送单坐标控制,速度为50,使X轴运动到200mm的位置
time.sleep(2)
pro450.send_coords([300, 86.8, 256.9, -178.0, 0.0, -90.0], 50) # 发送多坐标控制,速度为50
time.sleep(3)