快速移动
开始之前
1、确保机器已上电
2、确保机器连接正常、通信正常
3、确保机器处于零位状态
4、机器服务端已开启
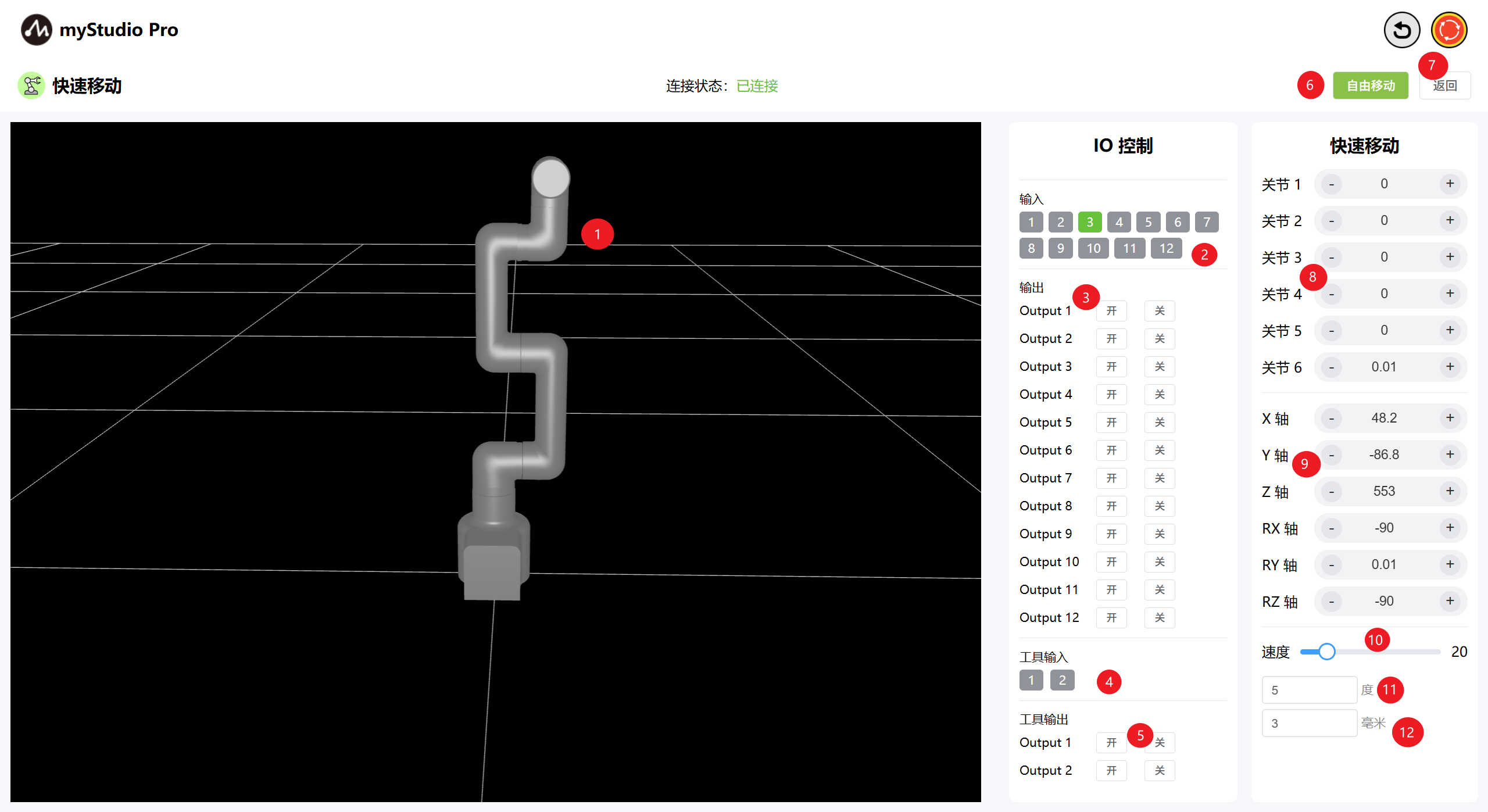
1 界面介绍
| 序号 | 说明 |
|---|---|
| 1 | MyCobotPro450 3D仿真模型 |
| 2 | 底部IO引脚号1-12,输入,属于安全模块检测项 |
| 3 | 底部IO引脚号1-12,输出,可以点击开关按钮进行设置输出 |
| 4 | 末端IO引脚号1、2,输入 |
| 5 | 末端IO引脚号1、2,输出,可用于控制Pro力控夹爪 |
| 6 | 打开自由移动模式 |
| 7 | 退出快速移动界面 |
| 8 | 角度控制,通过点击 + - 按钮,对机械臂进行关节角度控制,数值代表当前机械臂的关节角度信息,也可以直接修改数值进行关节控制 |
| 9 | 坐标控制,通过点击+ -按钮,对机械臂进行坐标控制,数值代表当前机械臂的坐标姿态信息,也可以直接修改数值进行坐标控制 |
| 10 | 设置机械臂的运动速度,默认 10 mm/s |
| 11 | 角度步长,调整角度时每次增加或减小的角度值 |
| 12 | 坐标步长,调整坐标姿态时每次增加或减小的坐标值 |
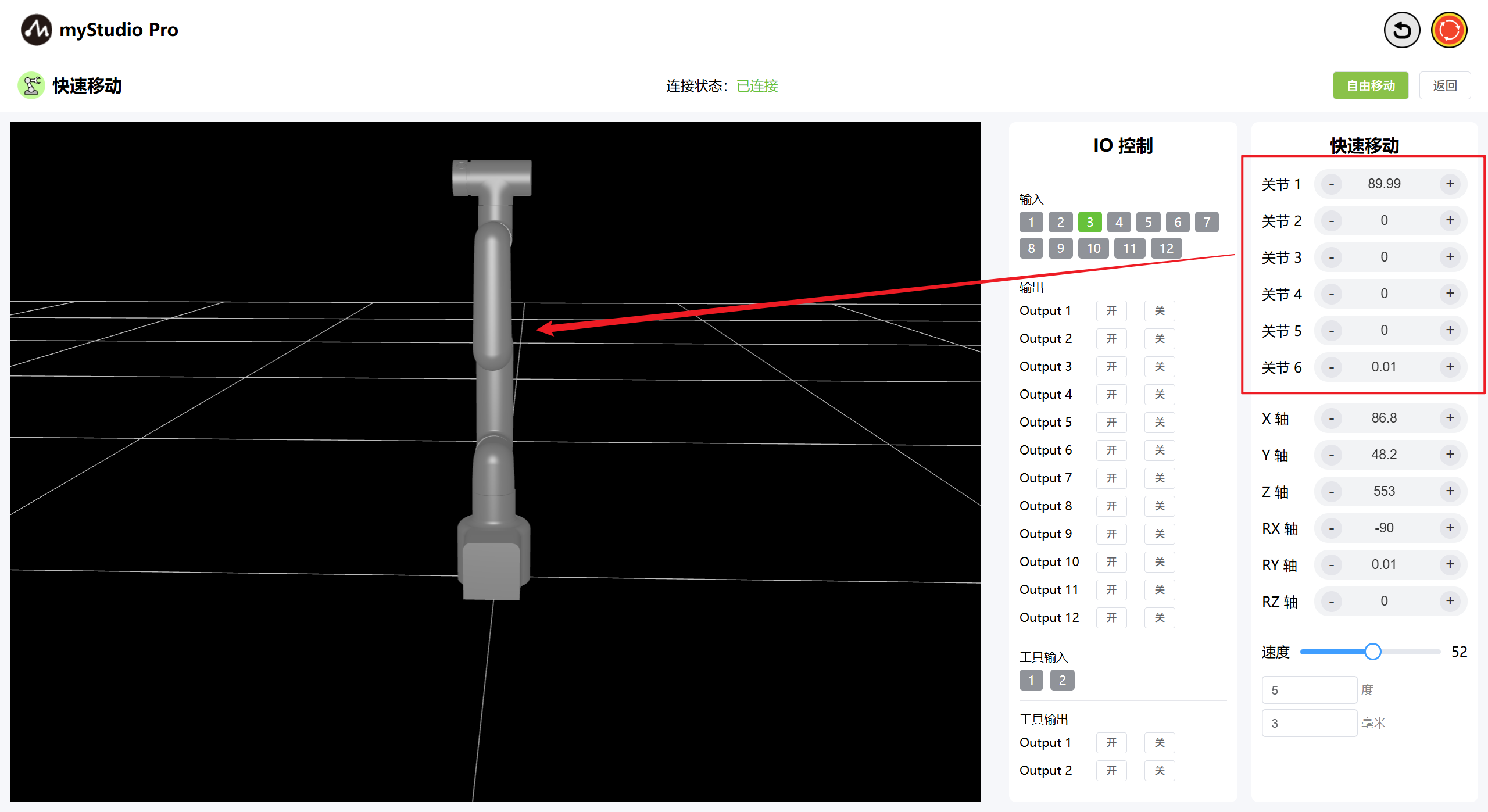
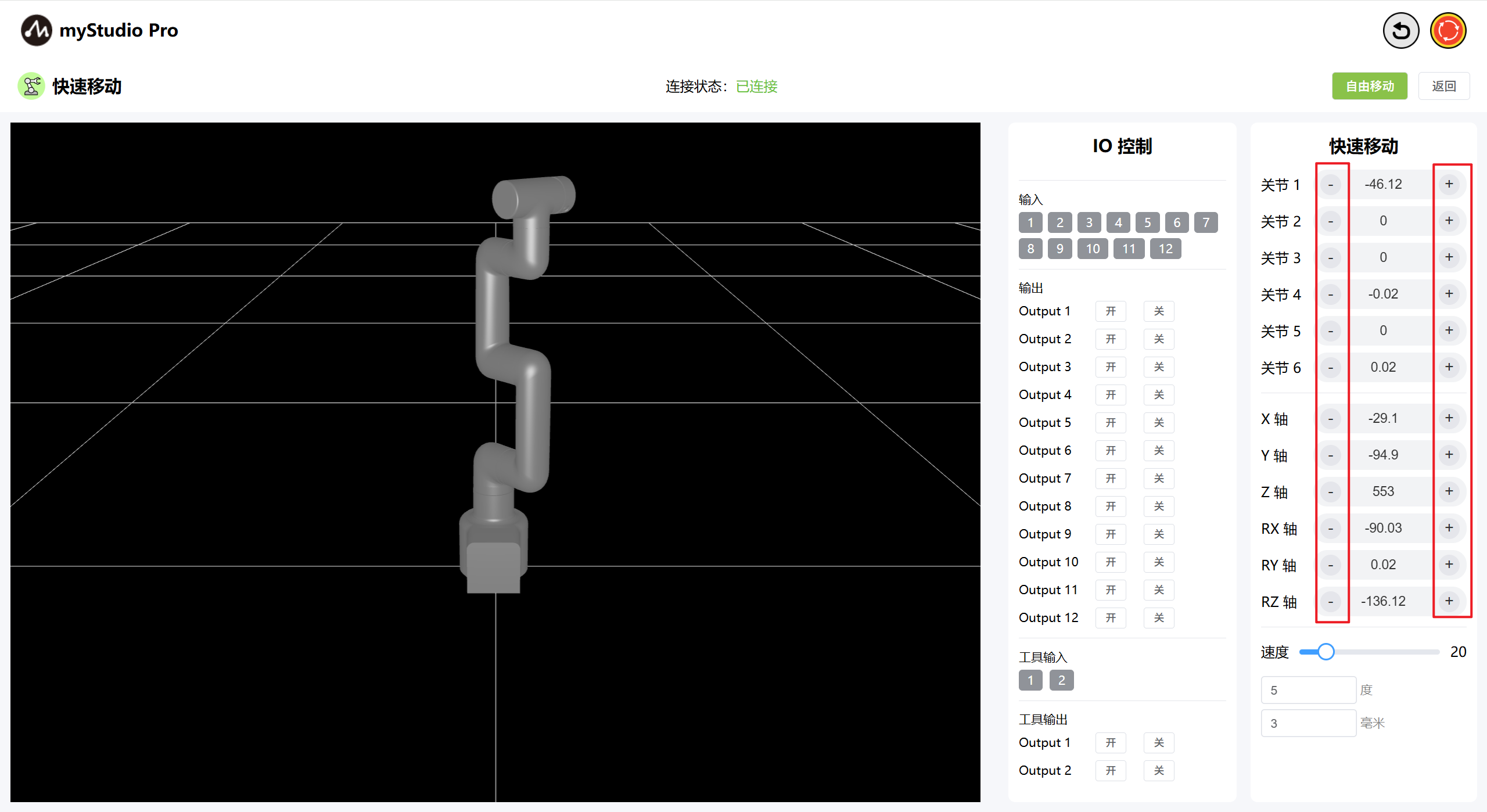
2 角度控制
在角度控制区域中,通过点击+ -按钮,对机械臂进行关节角度控制,数值代表当前机械臂的关节角度信息,也可以直接修改数值进行关节控制。
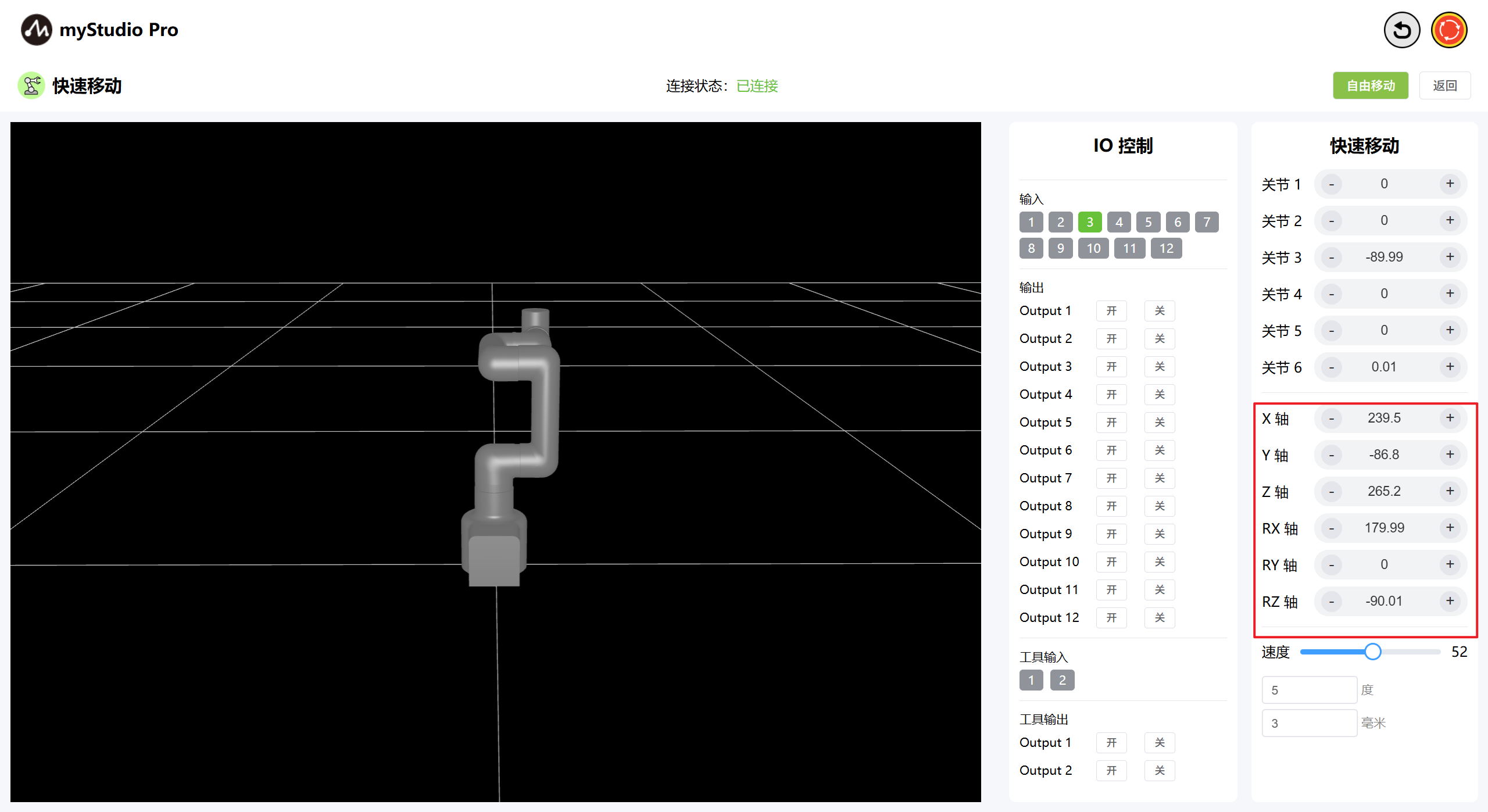
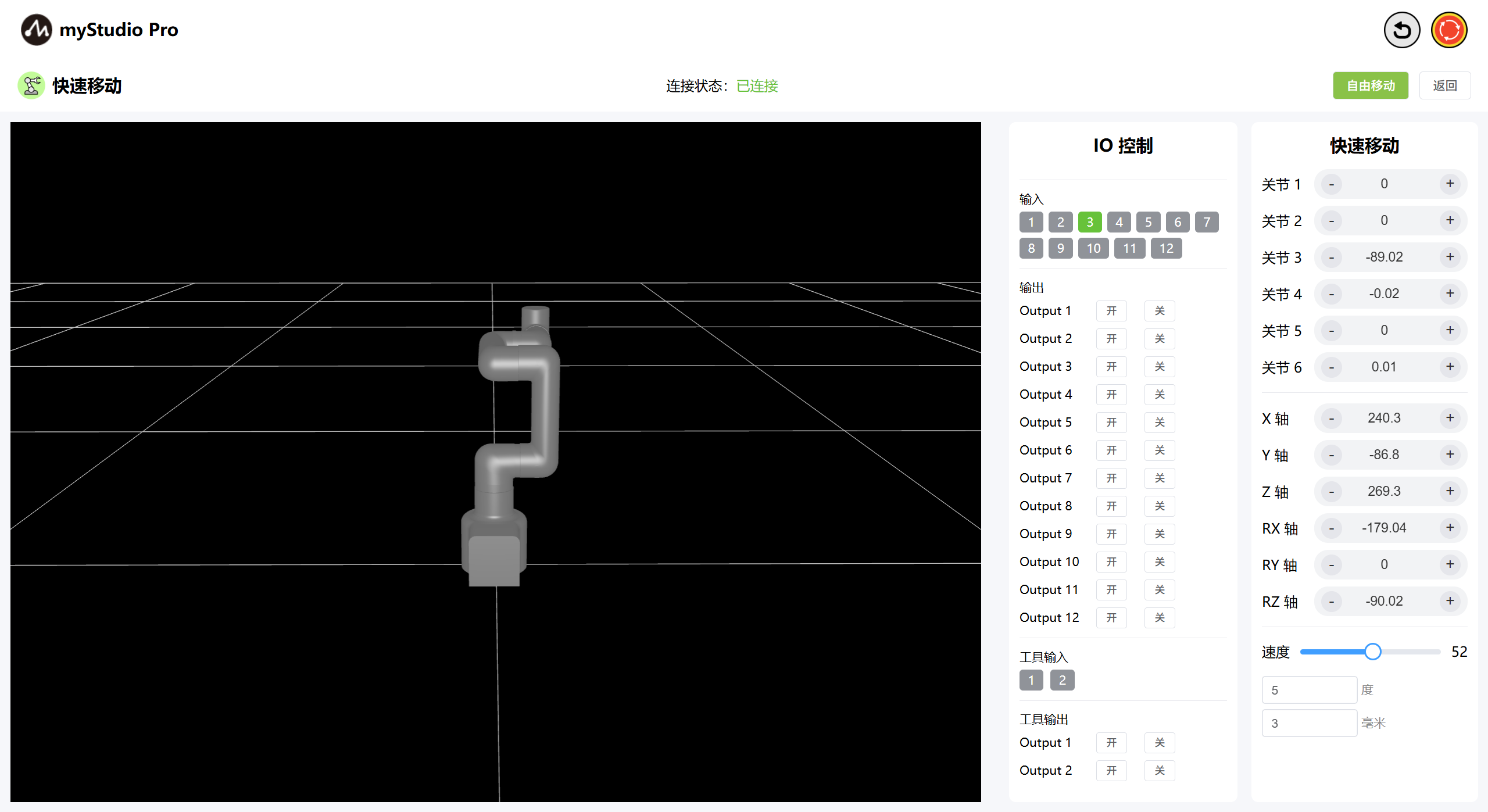
3 坐标控制
在使用坐标控制之前,需要将 关节3 移动到-90左右的角度位置。
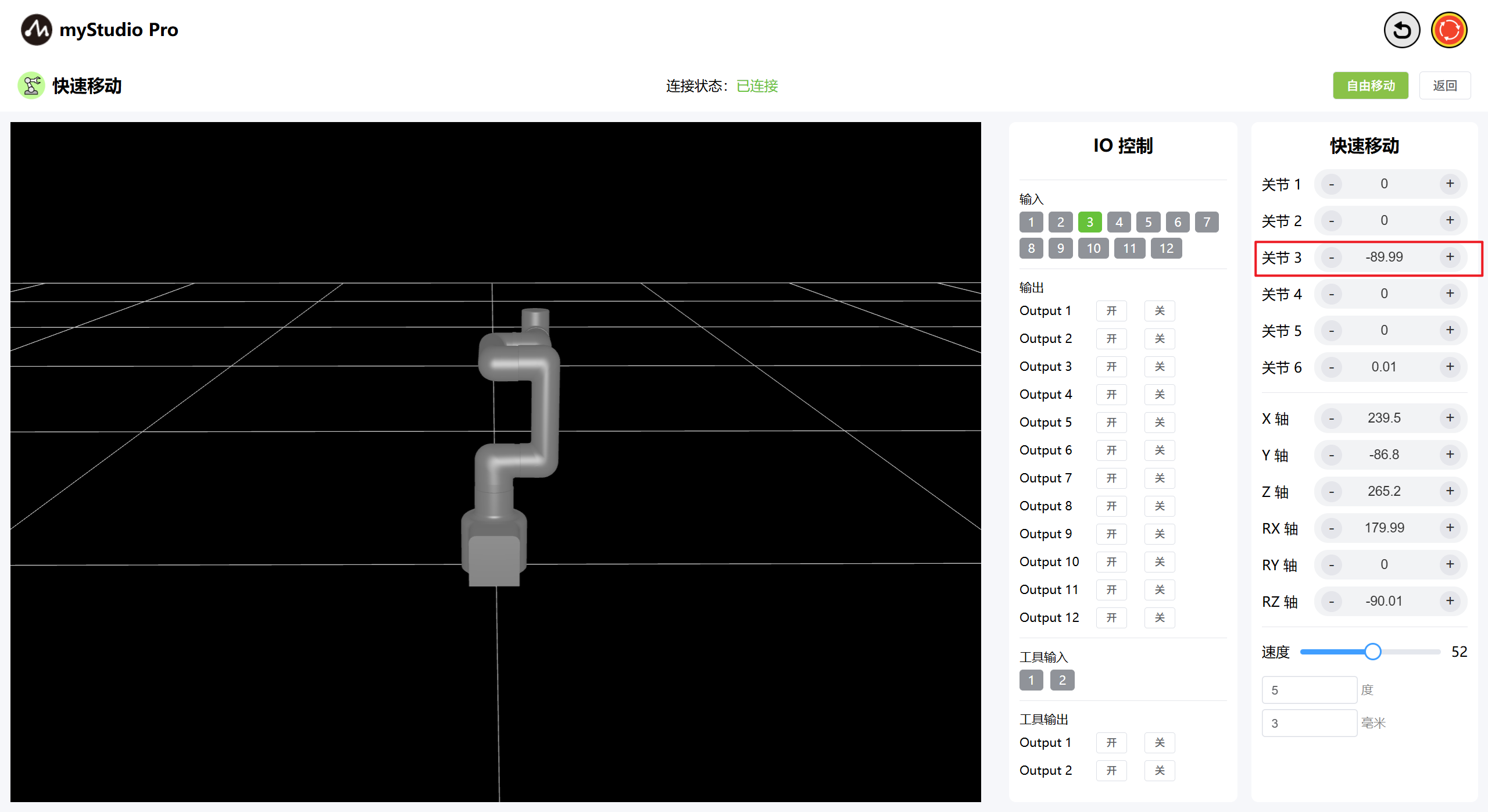
在坐标控制区域中,通过点击 + - 按钮,对机械臂进行坐标控制,数值代表当前机械臂的坐标姿态信息,也可以直接修改数值进行坐标控制。
4 自由移动
通过点击 自由移动 按钮,打开自由移动模式,界面按钮颜色变成橘黄色,代表机器处于自由移动模式状态,可进行机器的拖拽移动。
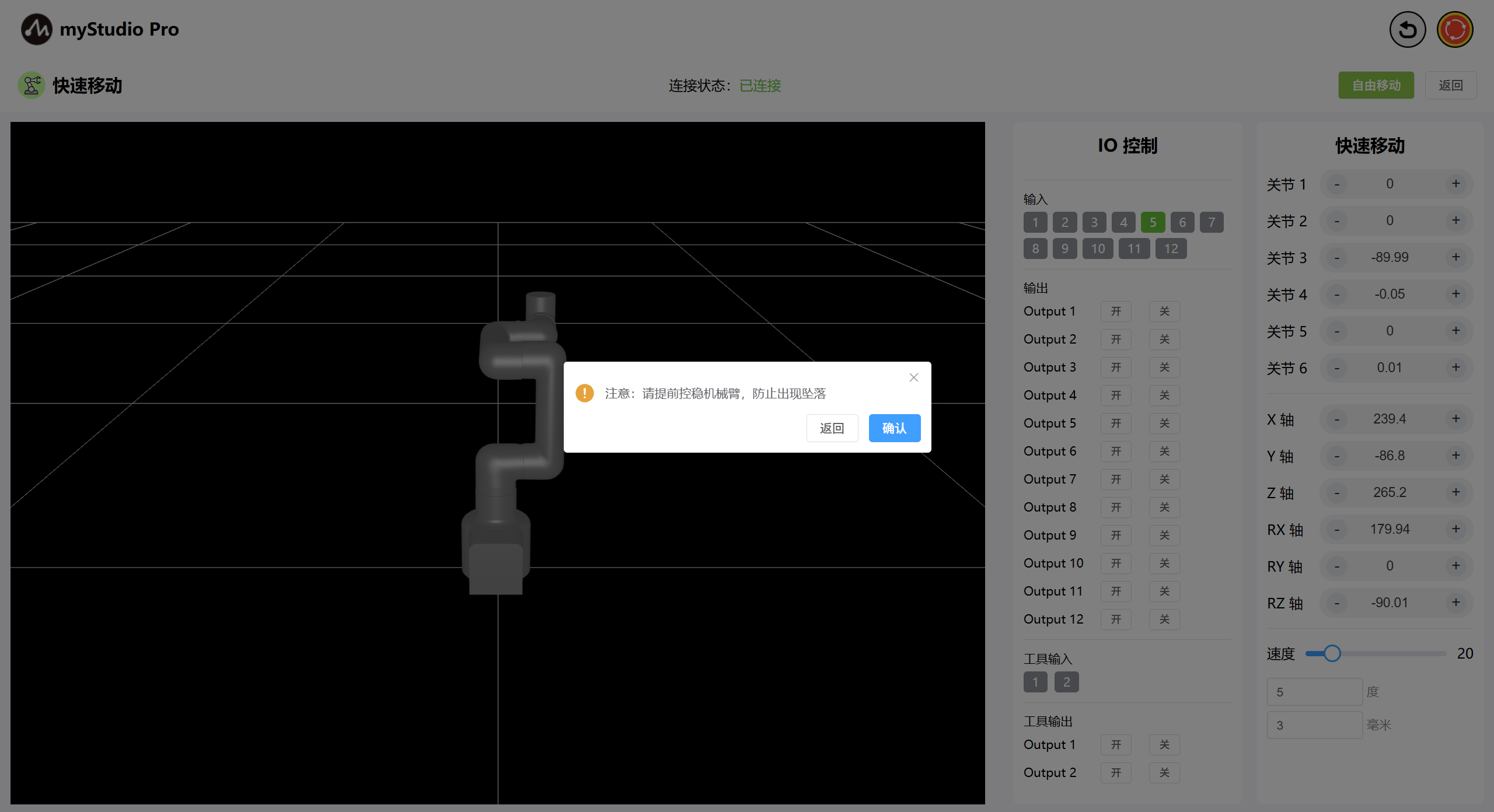
注意: 点击按钮后,会先出现二次确认弹出窗口,防止机械臂因不小心点击而释放关节,造成机器坠落。
点击“确定”按钮松开关节,机器可以自由移动。
按钮变为黄色:
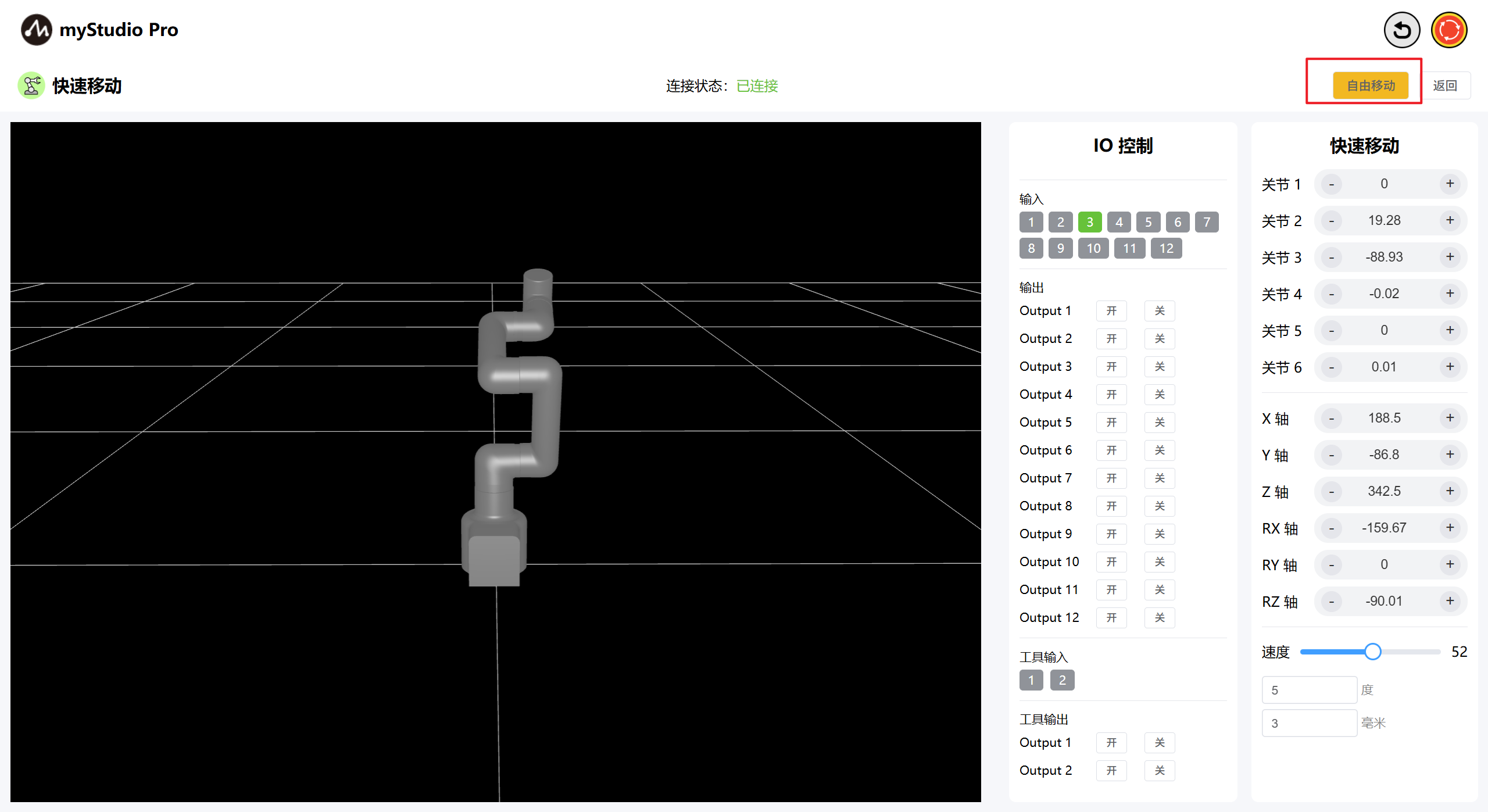
当自由移动按钮处于黄色状态时,再次点击该按钮,则代表关闭自由移动模式。
5 持续移动
以通过长按 对应区域的+ - 按钮,可以控制机器人按照指定的角度持续移动。
注意: + - 按钮每次长按 3 秒后,需要松开按钮,重新长按,再继续操作持续移动。
6 IO 控制
6.1 底部IO
设置底部IO引脚号 1-12 输出,用户可以自定义控制执行器。例如可以自定义控制夹爪、吸泵。
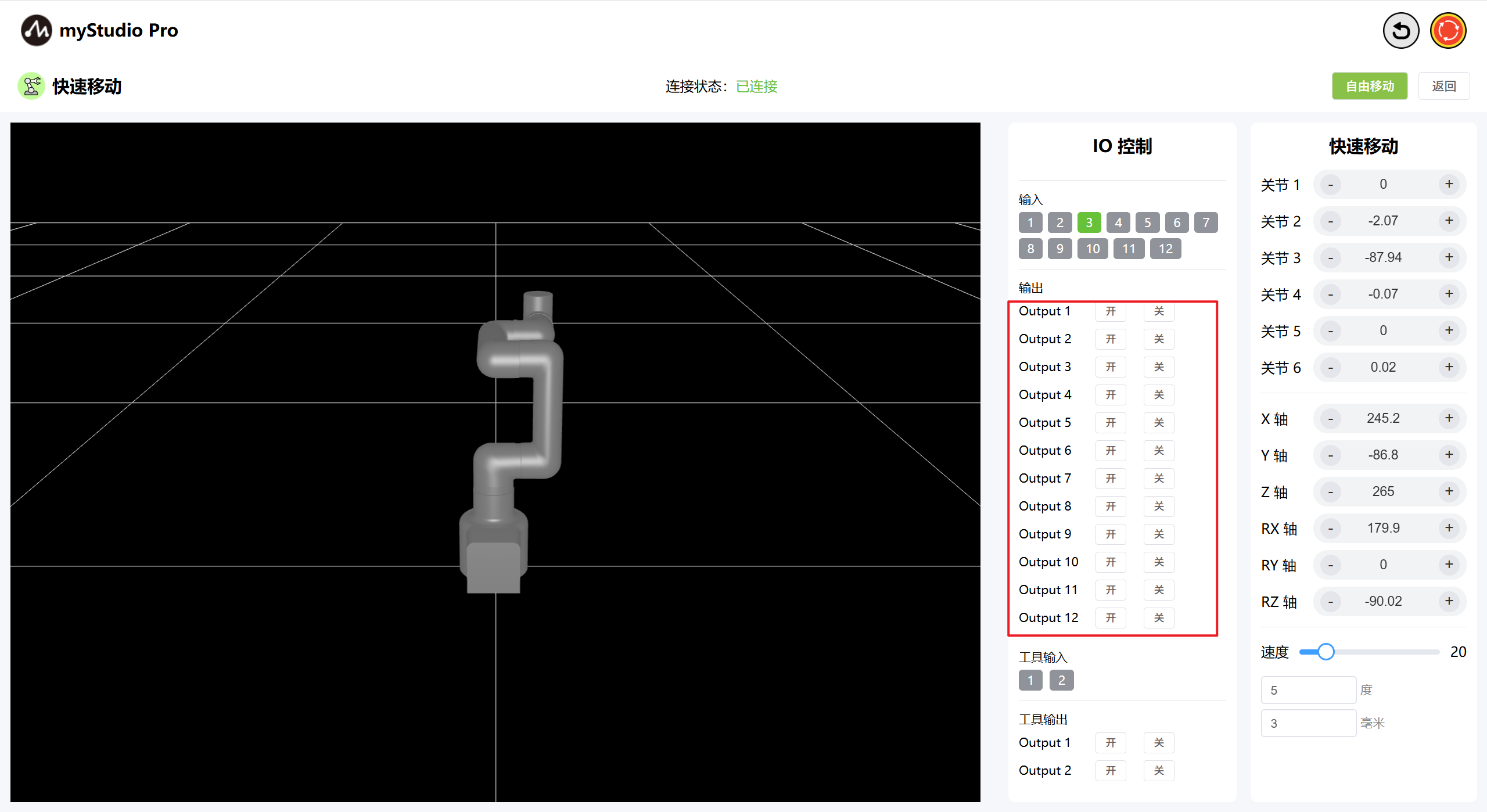
点击 开 关 按钮进行设置。
6.2 末端IO
设置末端IO引脚号 1-2 输出,可以控制Pro力控夹爪。
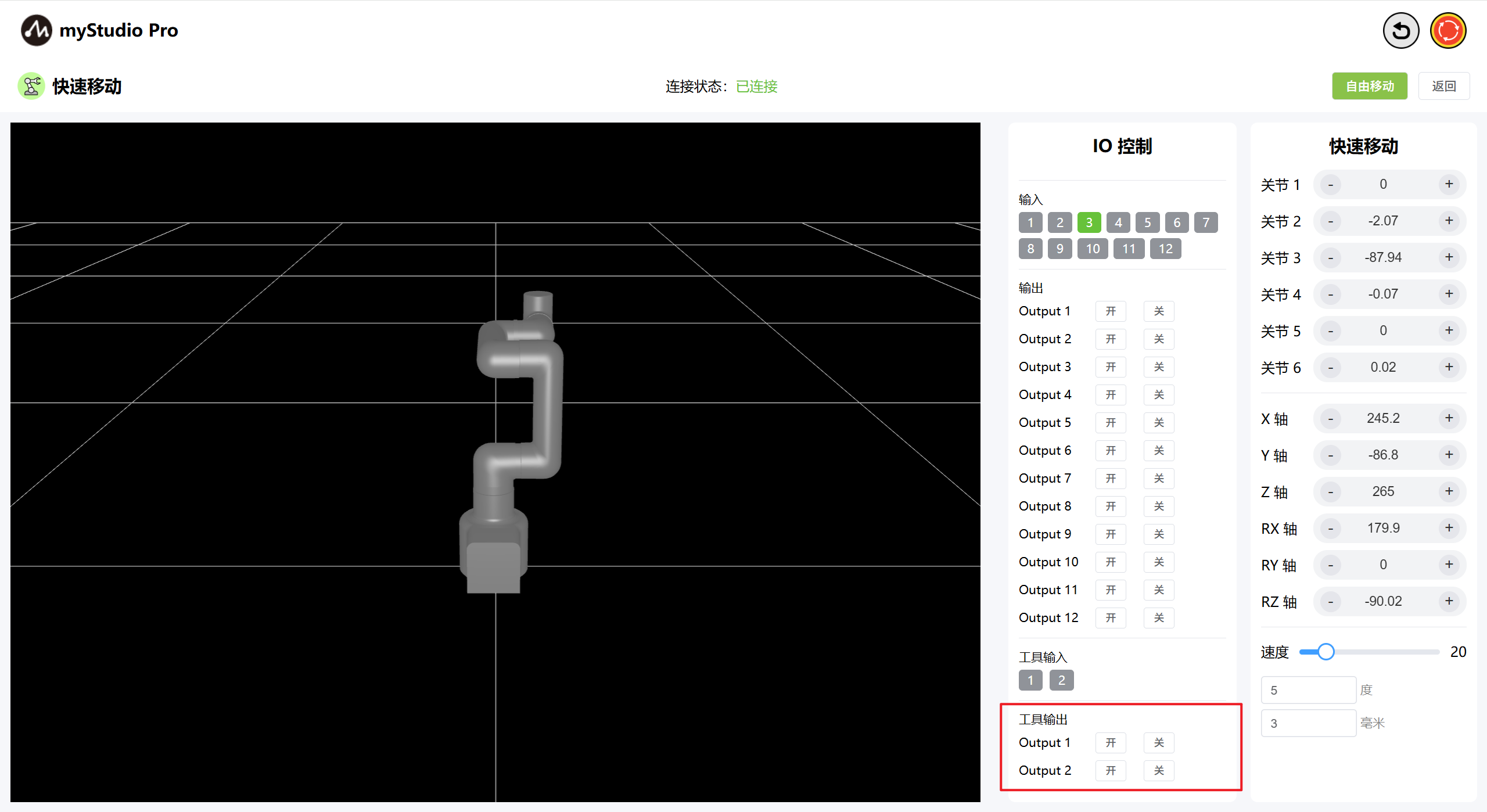
通过点击 开 关 按钮,打开Pro力控夹爪。
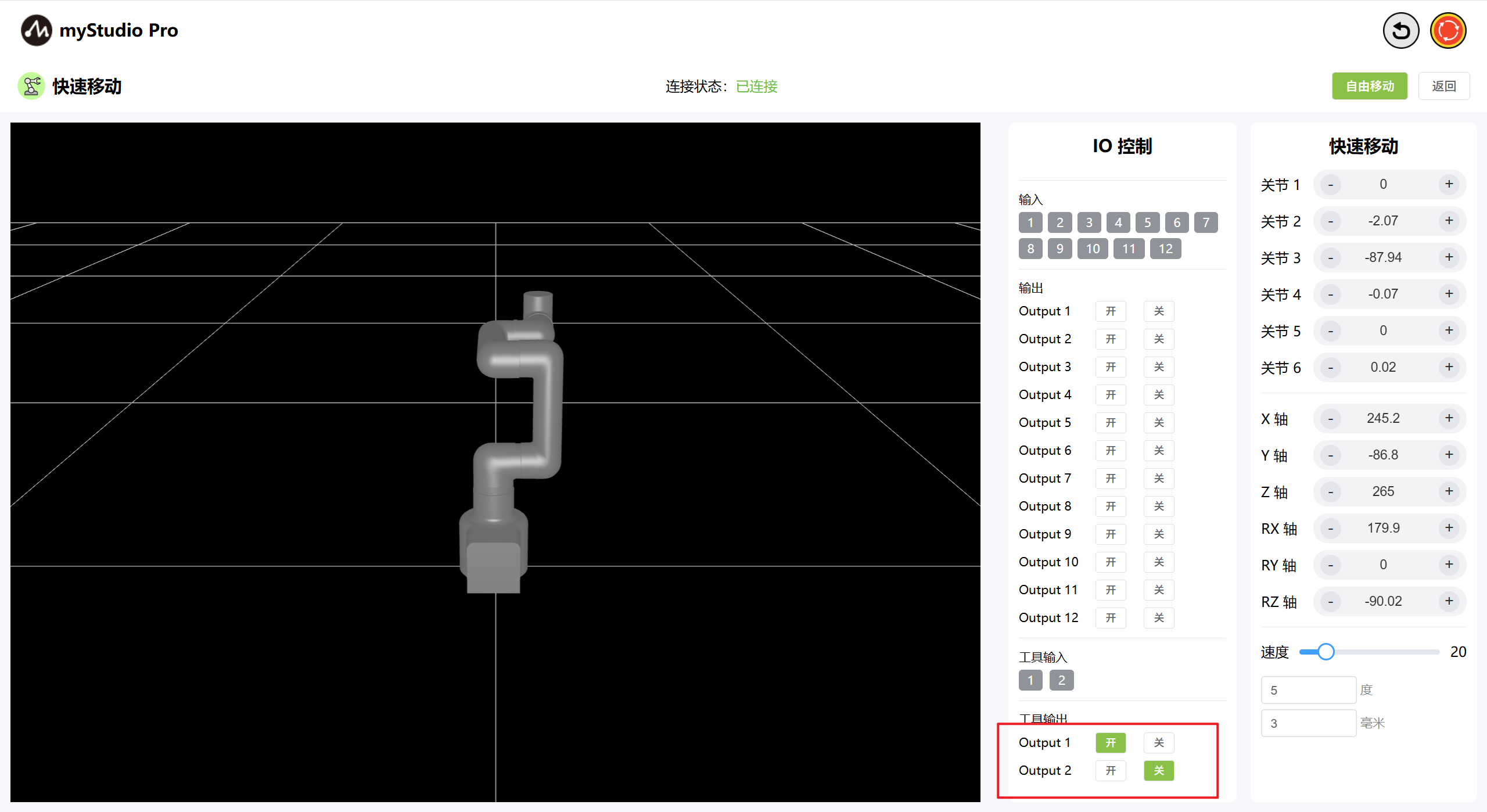
通过点击 关 开 按钮,关闭Pro力控夹爪。