其他问题
Q1:urdf文件下载路径在哪里?
- A1:请参考以下路径,所有mycobot机型的urdf都在此路径中:https://github.com/elephantrobotics/mycobot_ros/tree/noetic/mycobot_description/urdf
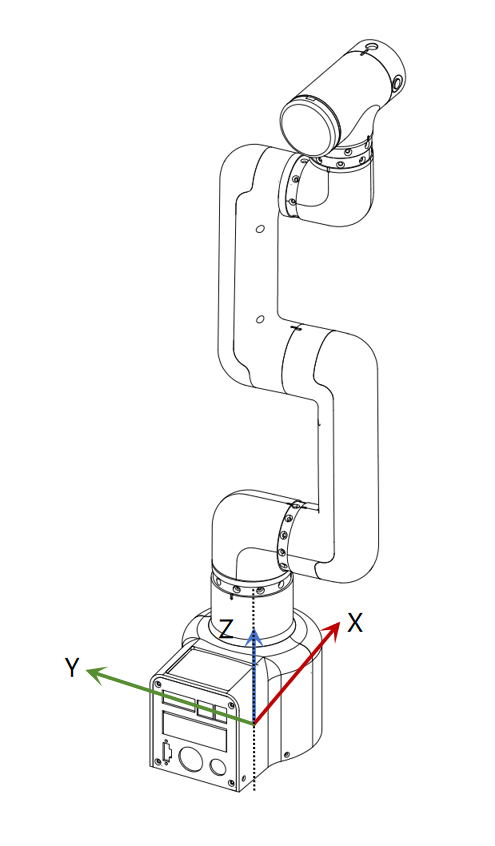
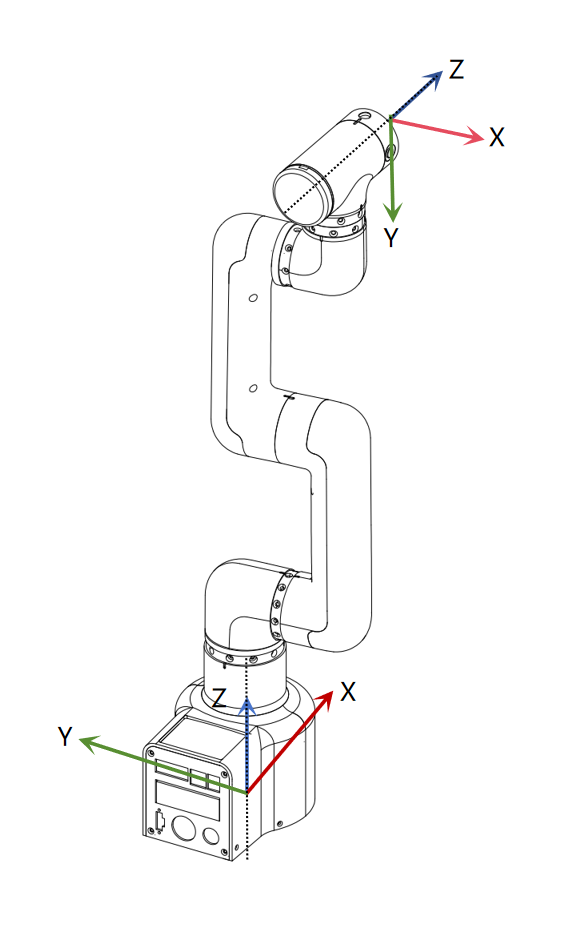
Q2:mycobot pro 450 机械臂基座标系是怎么样的?
Q3:450的关节是串口总线的控制方式吗?
A3:是的
Q4: 关于坐标的理解有更多的解释吗?
A4:控制坐标运动的API是send_coords([x,y,z,rx,ry,rz], speed) x、y、z 坐标: 控制了机械臂末端执行器在空间中的位置。改变这些坐标值将使机械臂移动到不同的空间位置,从而实现在三维空间中的定位。 rx、ry、rz 姿态角度: 控制了机械臂末端执行器的姿态或朝向。这些值通常以欧拉角的形式给出,描述了机械臂末端执行器相对于基坐标系的旋转,欧拉角顺序是zyx。改变这些值将使机械臂的末端执行器旋转到不同的角度或方向。 例如: 当你调整 +X 时,这表示在当前机械臂末端执行器的位置沿着当前末端执行器的 X 轴正方向移动一定的距离。这个动作会导致机械臂整体向某个方向移动。而当你调整 RX 时,这表示在当前机械臂末端执行器的姿态绕当前末端执行器的 X 轴旋转一定的角度。这个动作会导致机械臂整体发生旋转,末端执行器的方向会发生改变。 综合来看,+X 和 RX 的调整都会直接影响机械臂的运动状态,+X 控制位置的移动,而 RX 控制姿态的变化。 如果你更直观的看到变化,我们建议你使用myblockly的串口控制工具,单次调整一个参数,观察其在坐标系中的变化,请注意在观察rx、ry、rz 的时候如果想更加直观,请注意调整J1关节为0的时候调整x,ry,在关节为90时,调整y和rx 你可以参考下文的坐标系图示:
Q5: 关于DH参数的Offset 有更多的解释吗?Offset 是绕z旋转吗?
A5:DH参数描述了机械臂中相邻连杆之间的几何和运动关系。 在DH参数表中,Offset参数表示前一个连杆绕其z轴旋转对下一个连杆位置的影响,即连接两个连杆时的偏移量。对于机械臂中的Offset参数,一般表示上一个连杆绕自己的z轴旋转对下一个连杆位置的影响,而不是绕下一个连杆的z轴旋转。因此Offset不是绕z旋转,而是表示连接两个连杆时的位移。
Q6: 450机械臂供电的电压区间范围是多少?瞬间电流有多大?
A6: 24V ,9.2A
Q7:请问如果对各轴舵机进行角度控制和反馈获取,最短的通讯周期可以做到多少?
A7:这个需要根据速度决定间隔时间,最低响应时间是50ms
Q8:mycobot系列机器有碰撞检测吗?
A8:带算法碰撞自干涉,已经集成到设置关节角度及坐标的API里了
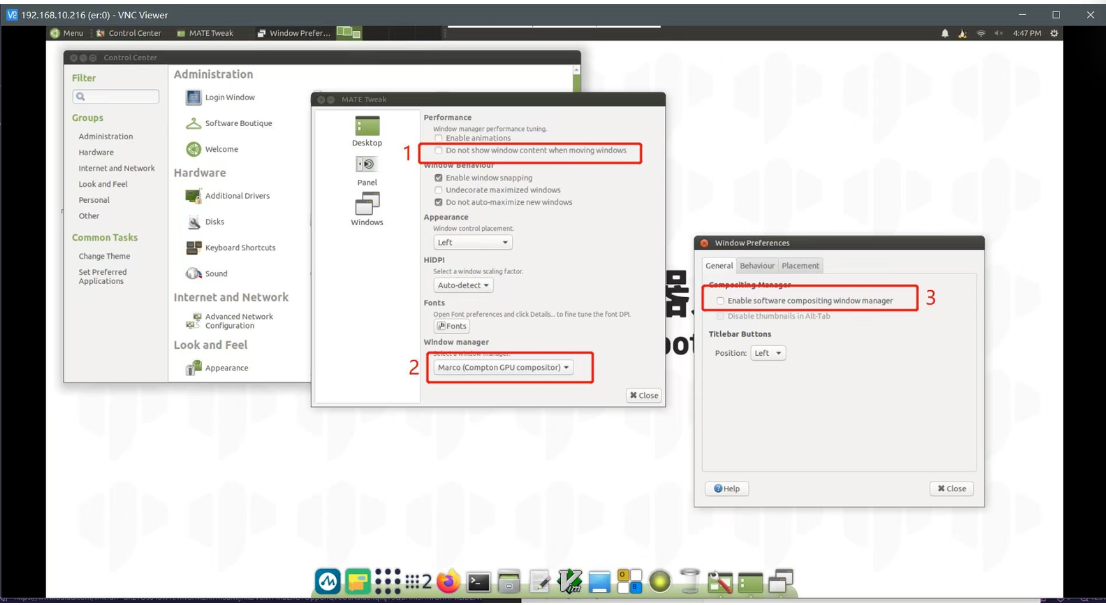
Q9:vnc拖拽卡顿怎么处理?
A9: 如果是由于在vnc中拖动任何窗口造成的卡顿断连,可以按照下面的图片做一些配置,选项需要与下面的图片一致。成功设置后,将解决由于拖动窗口导致VNC断开的问题。
Q10:更换450的第2个关节,发现4颗螺丝滑丝了怎么拆出来?
A10:关于关节的替换问题,那4个螺丝可以不必拆卸,请拆卸中间那颗大螺丝,然后将J2关节主体固定回去,然后用力将整个连轴件一并抽取出来即可,具体操作我为你录制了一个视频,你可以参考
Q11:关节扭矩信息提供吗?
A11: 我们的机器都只提供整体关节的整体信息,不提供舵机、电机执行单元的内部扭矩、电压电流等参数信息,公开的是机械臂整体参数,如重复定位精度,电源电压等等
Q12:下图中的查看看两坐标之间的关系怎么理解?
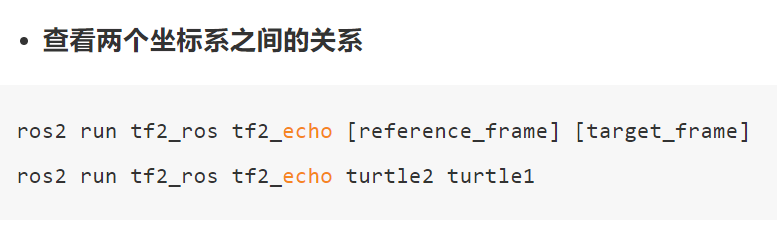
A12: 指的是如果你想查看名为 "turtle1" 的坐标系相对于名为 "turtle2" 的坐标系的变换关系,可以使用这个指令,通俗一点来说就是当你运行这个命令时,它会告诉你一个物体("turtle1")相对于另一个物体("turtle2")的位置和方向信息。就像在地图上你可以知道一个城市相对于另一个城市的位置一样
Q13:ROS2的环境被不小心改动,我可以直接删掉ROS,自己重新安装吗?
A13:关于ROS重新安装这个问题,我们不建议用户自己重新安装,因为ROS环境的搭建会相对复杂,容易出错,如果需要重置ROS环镜,我们建议用户重新刷写系统镜像,具体方法请参考 基于ROS2开发使用
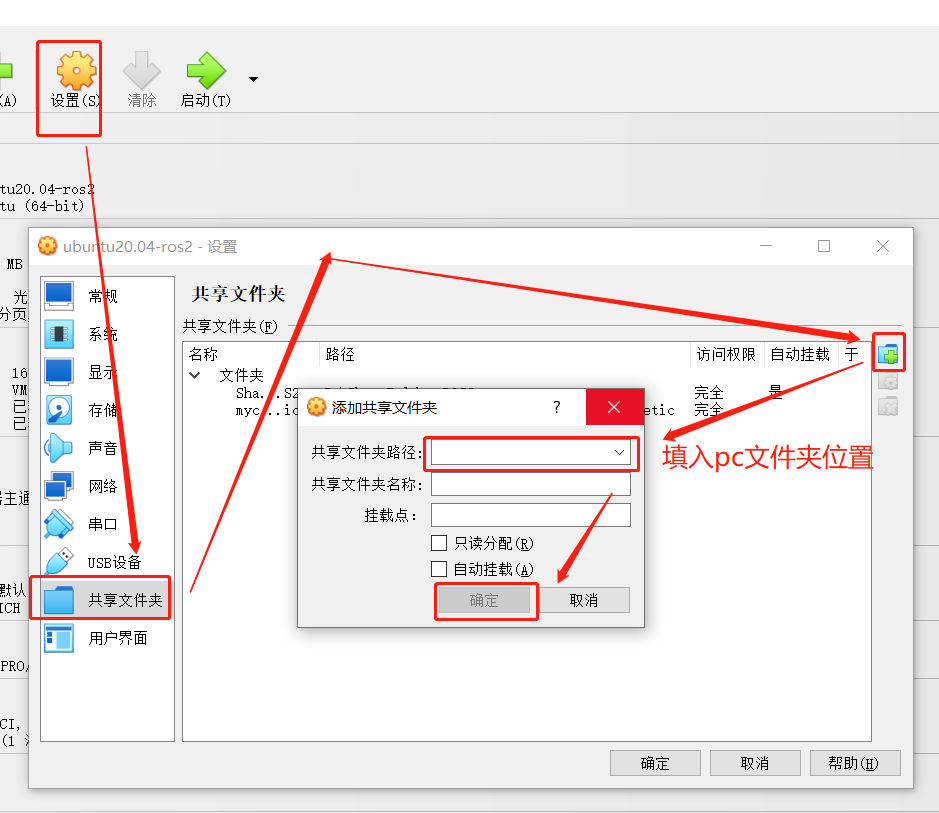
Q14:主机如何将文件传输到虚拟机中
A14:按下图设置共享文件夹,可以将PC中的文件传输到虚拟机中
Q15:API和串口指令直接控制关节有什么区别?
A15:API 提供了简化、抽象化的接口,使开发更高效和容易,适合快速开发和集成。 串口指令 提供了直接、底层的控制,适合需要精细调整或开发自定义功能的场景,但通常开发和调试更复杂。 总得来说: 使用串口指令直接控制机械臂更加灵活,但也更加复杂,需要对通信协议有深入的了解;而使用API控制更加简单方便,但可能会受限于API提供的功能和性能。
Q16:windows运行git指令报错
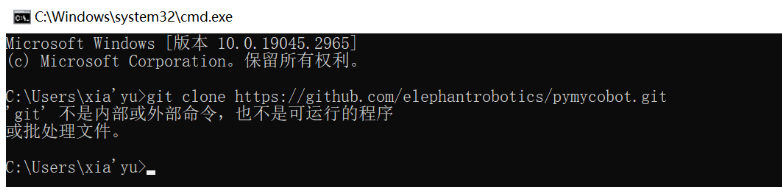
A16:这是没有安装git导致的,需要先安装了git,再使用git指令
Q17:MDI和JOG的区别是什么?
A17: MDI(Manual Data Input)称为设定值直接给定运行方式。即上位控制器直接设 置目标位置、速度、加减速度后,轴自动移动到目标位置的定位方式。MDI 也是 实际应用中最常使用的一种定位功能。 JOG朝某一方向连续移动。
Q18:末端零位异常
A18: 长时间使用自适应夹爪夹取物品后会出现夹爪和末端零位异常的现象,需要将夹爪静止。
Q19:什么的是正向运动学和逆向运动学?
A19:正向运动学(Forward Kinematics)是指已知机器人各个关节的角度(或位移),求解机器人末端执行器(如机械臂的手爪)在笛卡尔空间中的位置和姿态。get_coords()的API中实现了,但是具体的算法不公开。 逆运动学(Inverse Kinematics)与正向运动学相反,它是指已知机器人末端执行器在笛卡尔空间中的位置和姿态,求解机器人各个关节的角度(或位移)write_coords()、send_coords()