机器人参数说明
第一章中,我们探讨了产品的卖点及其设计理念,为您提供了对产品高层次理解的全景视角。现在,让我们进入第二章——机器人参数说明。这一章节将是您理解产品技术细节的关键。详细了解这些技术参数,不仅可以帮助您充分认识到我们产品的先进性和实用性,而且还能够确保您能够更有效地利用这些技术来满足您的具体需求。
重要说明:机械臂的具体参数会因所购版本不同而有所区别,最终请以实际交付版本的产品规格为准!!!
1. 机器人规格参数

| 指标 | 参数 |
|---|---|
| 名称 | 全谐波协作机械臂 |
| 型号 | myCobot Pro 450 |
| 自由度 | 6 |
| 有效负载 | 1 Kg |
| 工作半径 | 450mm |
| 重复定位精度 | ±0.1mm |
| 重量 | <5Kg |
| 电源输入 | 24V,9.2A |
| 工作温度 | 0-45℃ |
| 通信 | TCP/IP-Socket MODBUS Ethernet IP |
2. 结构尺寸参数
!本章以毫米为距离单位,以度为角度单位。
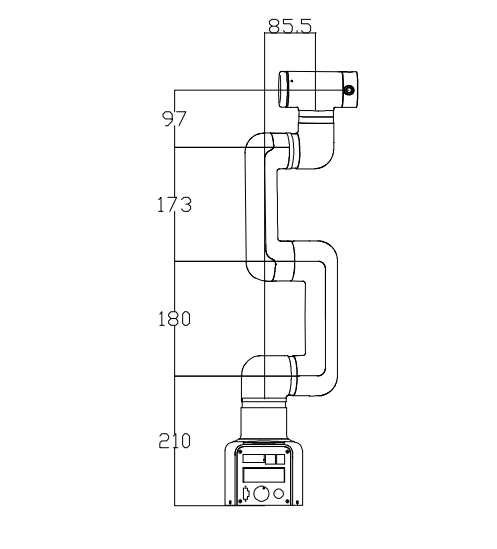
2.1 产品尺寸
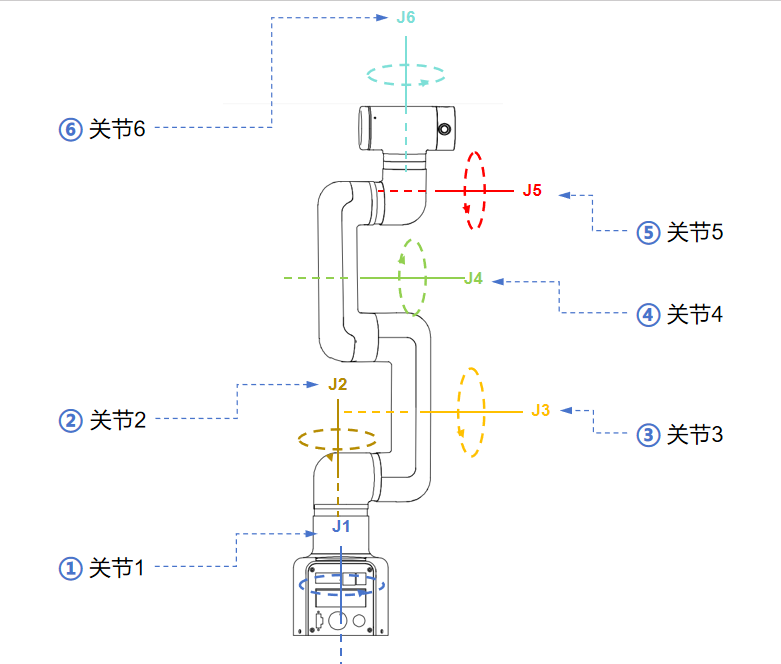
2.2 关节运动范围
硬件关节运动范围
| 关节 | 范围 |
|---|---|
| J1 | -165 ~ 165 |
| J2 | -117 ~ 117 |
| J3 | -157 ~ 157 |
| J4 | -165 ~ 165 |
| J5 | -165 ~ 165 |
| J6 | -168 ~ 168 |
软件关节运动范围
| 关节 | 范围 |
|---|---|
| J1 | -162 ~ 162 |
| J2 | -125 ~ 125 |
| J3 | -154 ~ 154 |
| J4 | -162 ~ 162 |
| J5 | -162 ~ 162 |
| J6 | -165 ~ 165 |
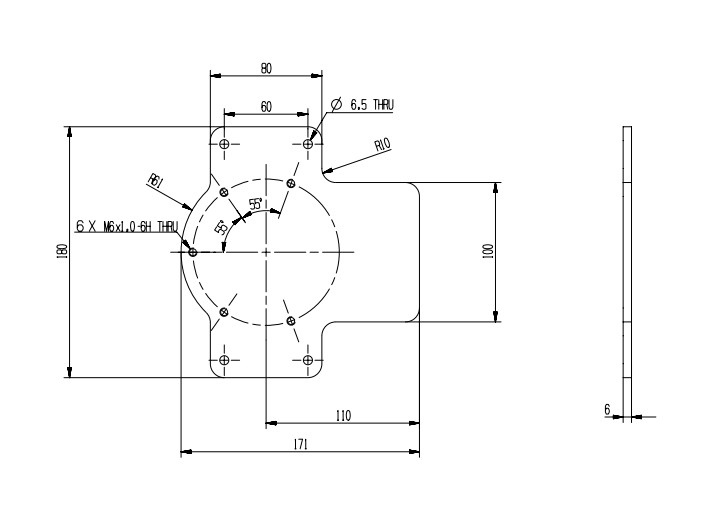
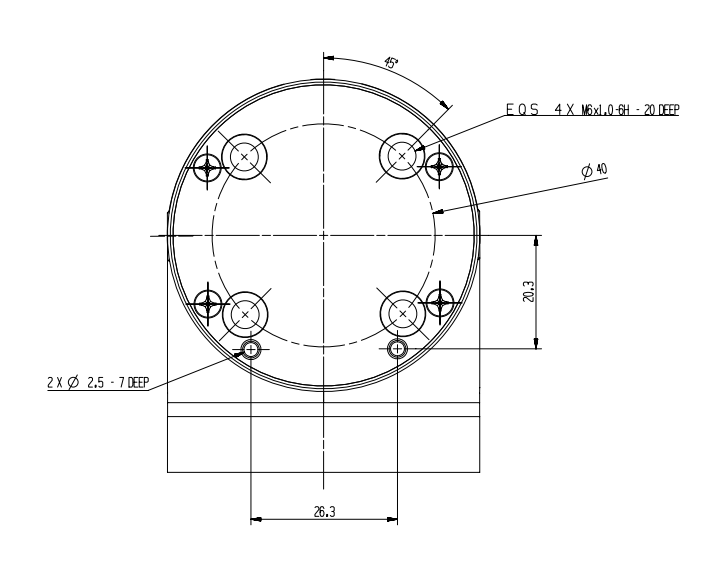
2.3 孔位安装
- 机器人底座安装法兰,底座同时兼容乐高科技件安装方式和M4螺丝安装方式。
- 机器人末端安装法兰,机械臂末端同时兼容乐高科技件孔与螺丝螺纹孔。
3. 电气特性参数
3.1 机械臂底座电气接口
3.1.1 底座介绍
底座正面图:

- ① RJ45:双网口,用于设备联网或连接其他网络设备。
- ② USB3:高速USB接口,连接电脑或外围设备。
- ③ RS485:工业串口通信,连接PLC、传感器等。线序(从左到右):GND、485_B、485_A
- ④ CAN:CAN总线通信,连接驱动器。线序(从左到右):CAN_GND、CAN_L、CAN_H
- ⑤ 功能IO:数字信号输入/输出。
- ⑥ 电源开关:按下锁定为开机,再次按下释放为关机。
- ⑦ DC24V电源:连接电源适配器。
- ⑧ 急停接口:连接外部急停按钮,紧急情况下切断电源,保障安全。
3.1.2 底座接口说明
- 每个接口的定义如下表所示:
| 标签 | 信号名 | 类型 | 功能 |
|---|---|---|---|
| 2 | 1-12 | I/O | 24V |
3.2 机械臂末端电气接口
3.2.1 机械臂末端介绍
机械臂末端侧视图

| 编号 | 接口 | 定义 | 功能 |
|---|---|---|---|
| 12 | M8航空插座 | 末端工具IO接口 | 24V/2A输出,支持短路、反接、雷击、过流、过压保护 |
| M8航空插座 | RS485接口 | 支持配置波特率9600、115200 |
3.2.2 机械臂末端接口说明
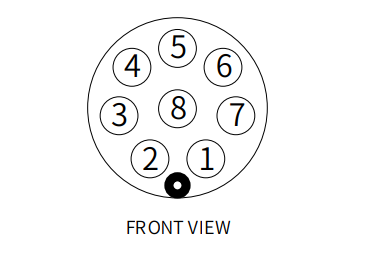
- 每个接口的定义如下表所示:
各个工具I/O端口的定义如下表所示,注意的是,工具I/O是输出是PNP类型,输入为NPN类型。接线方式同底部输出接口一致。
| 编号 | 信号 | 解释 | 配套M8线颜色 |
|---|---|---|---|
| 1 | GND | DC24V 负极 | 白 |
| 2 | OUT1 | 工具输出接口1 | 褐 |
| 3 | OUT2 | 工具输出接口2 | 绿 |
| 4 | 485A | 485标准接口A | 黄 |
| 5 | 24V | DC24V 正极 | 灰 |
| 6 | IN1 | 工具输入接口1 | 粉 |
| 7 | IN2 | 具输入接口2 | 蓝 |
| 8 | 485B | 485标准接口B | 紫 |
4. 笛卡尔坐标参数
- 每个坐标系的定义如下表所示:
| 坐标系 | 定义 |
|---|---|
| 末端坐标系 | - 原点:末端法兰盘表面与J6旋转轴的交点。 - X轴:机械臂处于关节零位时,面朝底座开关,水平向右。 - Y轴:机械臂处于关节零位时,面朝底座开关,竖直向下。 - Z轴:机械臂处于关节零位时,面朝底座开关,水平向前。 |
| 基坐标系 | - 原点:底座底面与J1旋转轴的交点。 - X轴:面朝底座开关,水平向前。 - Y轴:面朝底座开关,水平向左。 - Z轴:竖直向上。 |