Arduino 简单使用
1 连接设备
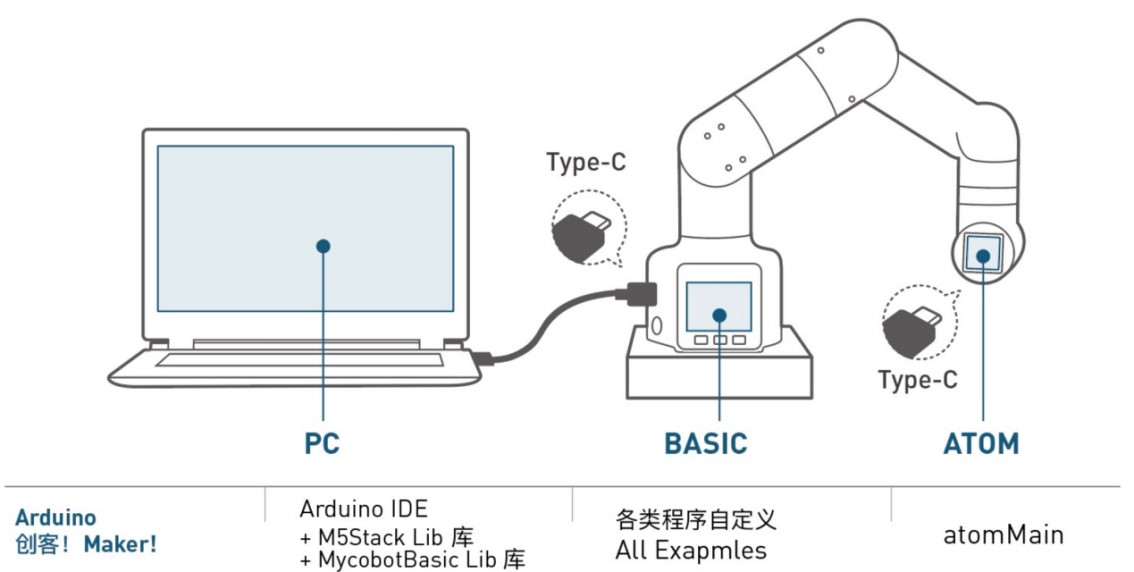
以 myCobot 280-M5 为例,用 Tyep-C 数据线把机械臂底座上的M5Stack-basic与 PC 端相连接。
2 固件要求
ATOM :使用 MyStudio 烧录最新版 AtomMain
Basic :无要求
3 检测链接
打开电脑设备管理器查看有无设备。如未检测到设备,请更换USB连接线,如果显示无法使用,请安装点击下载 CP210X 驱动 ,下载完成后解压并安装所需的驱动版本即可使用。
打开 Arduino IDE -->工具 --> 端口 查看有无设备。如未检测到设备,请更换USB连接线测试,或检测驱动是否安装成功。
4 开始开发
以烧录一个官方 demo 为例,打开 Arduino IDE --> 文件 --> 示例--> MyCobotBasic 就可以看到所有的项目示例(如果未看到示例,可以将Arduino重启)。选择烧录一个简单的 demo , 例如 --> MyCobot280--> MyCobot280-M5--> AnglesControl 。
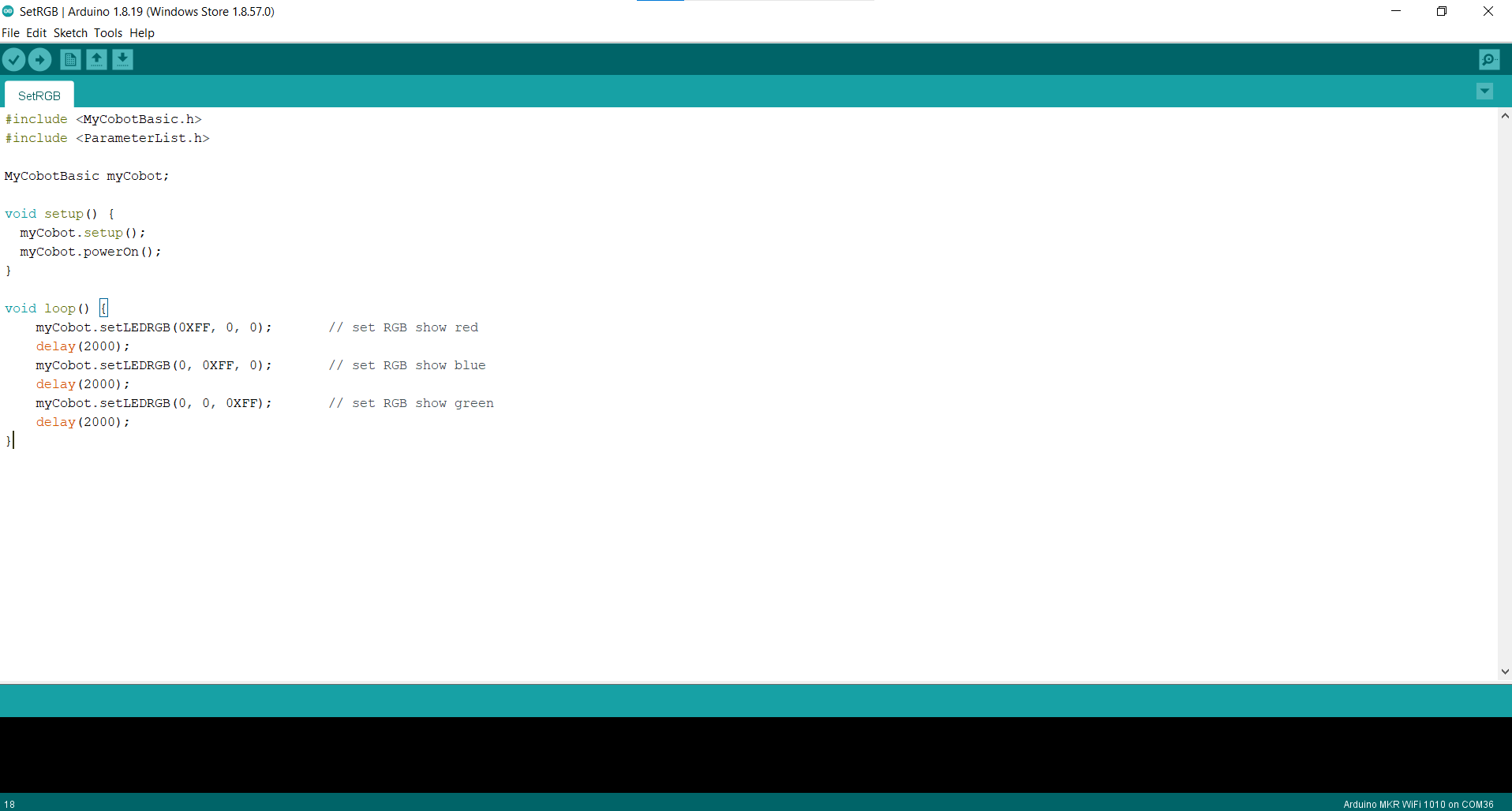
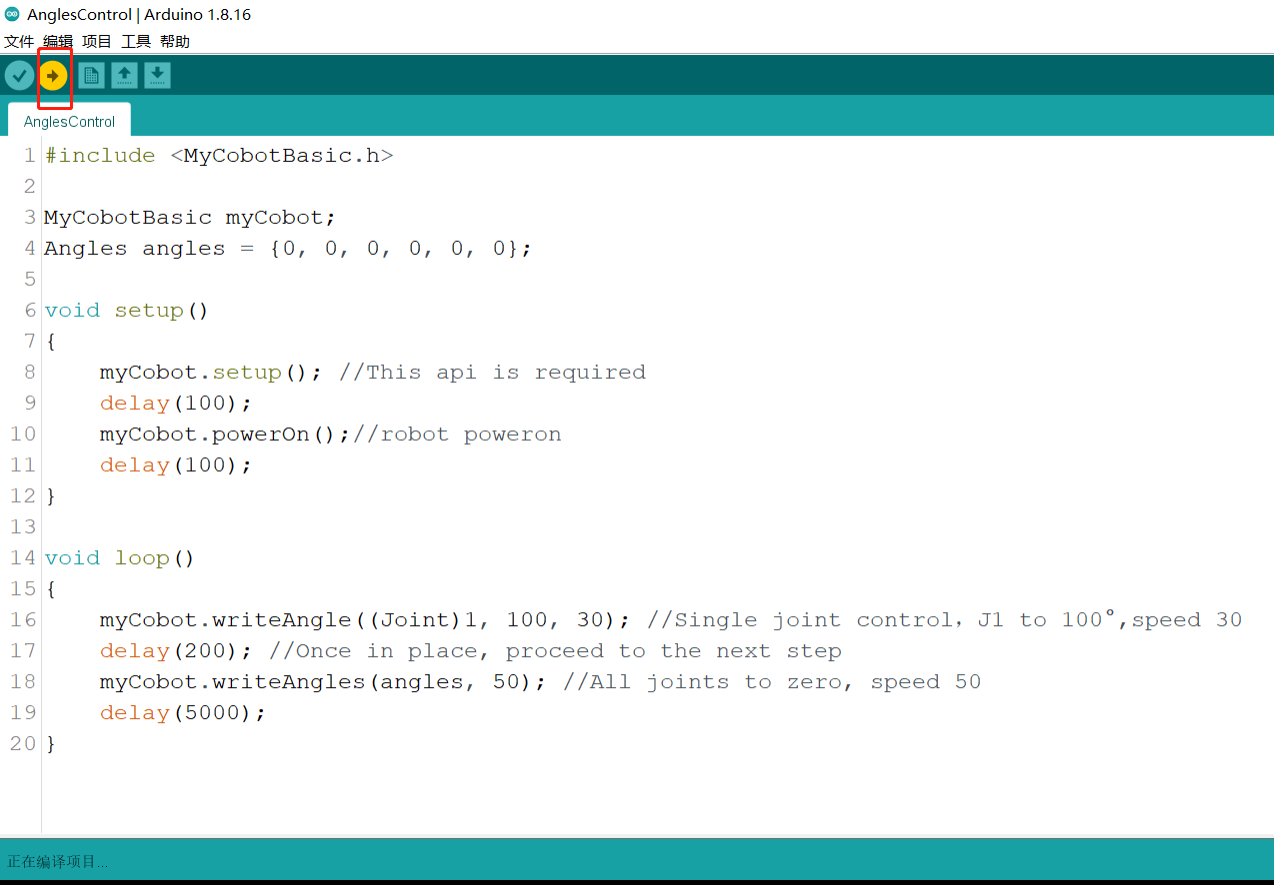
从示例文件中打开AnglesControl.ino
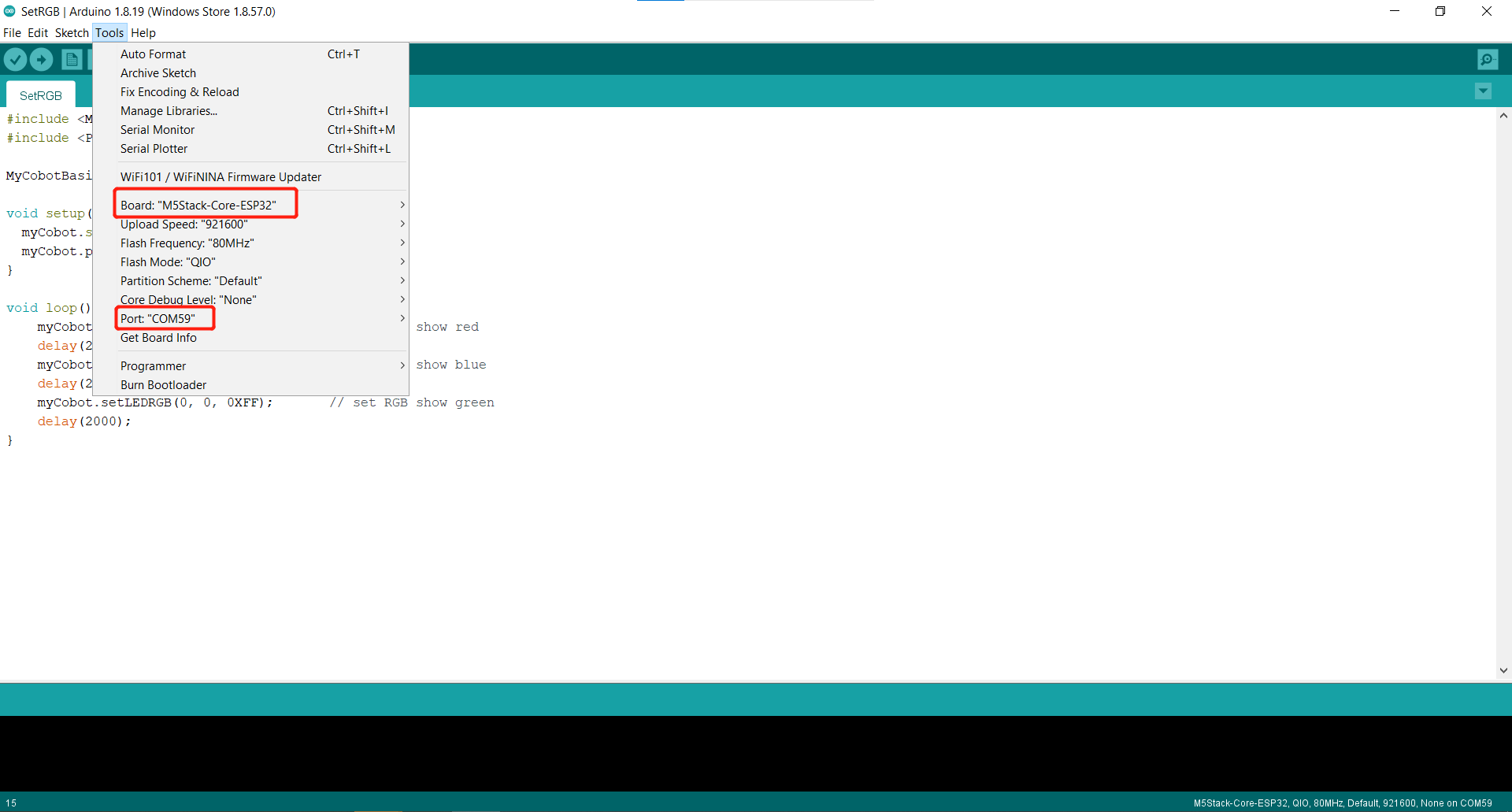
注意: 选择开发板为 M5Stack-Core-ESP32 和对应的 COM口 。
如果您使用的是myCobot280-M5,请使用MyCobot280-M5文件夹下的ParameterList.h,替换掉MyCobotBasic文件夹下的ParameterList.h,具体请看下图:
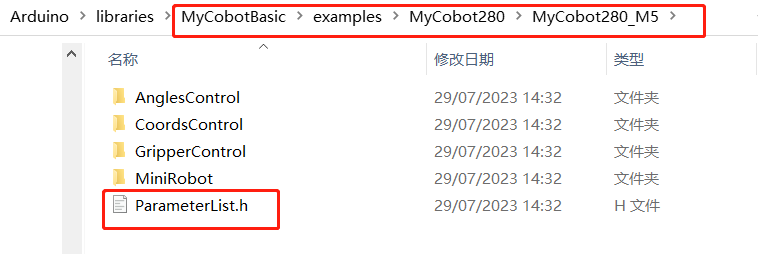
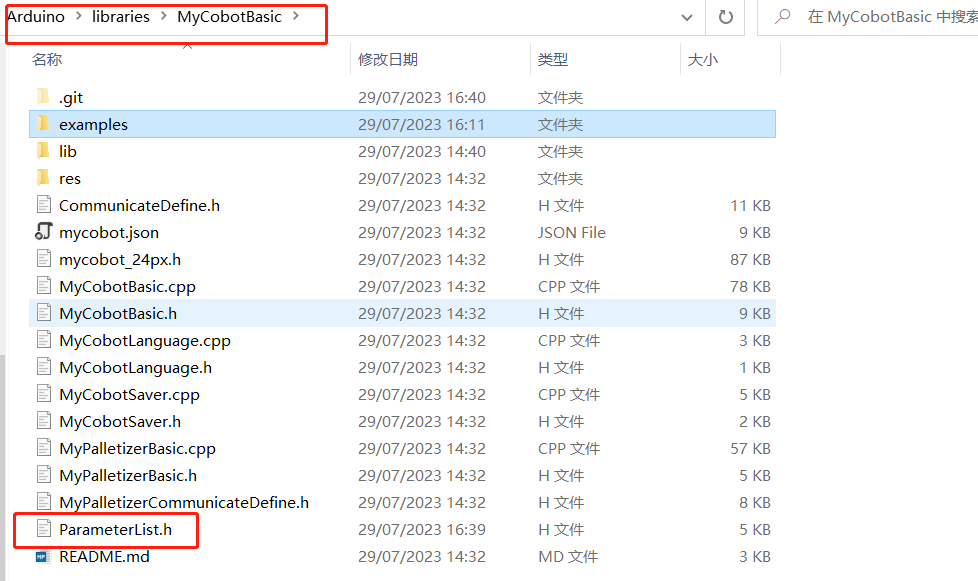
注意: 使用不同机型时,请使用各自案例目录下的"ParameterList.h"文件替换"MyCobotBasic\ParameterList.h"文件
点击上传并等待右下方进度条跑完
等待直到右下方显示上传成功,程序就已经下载完成
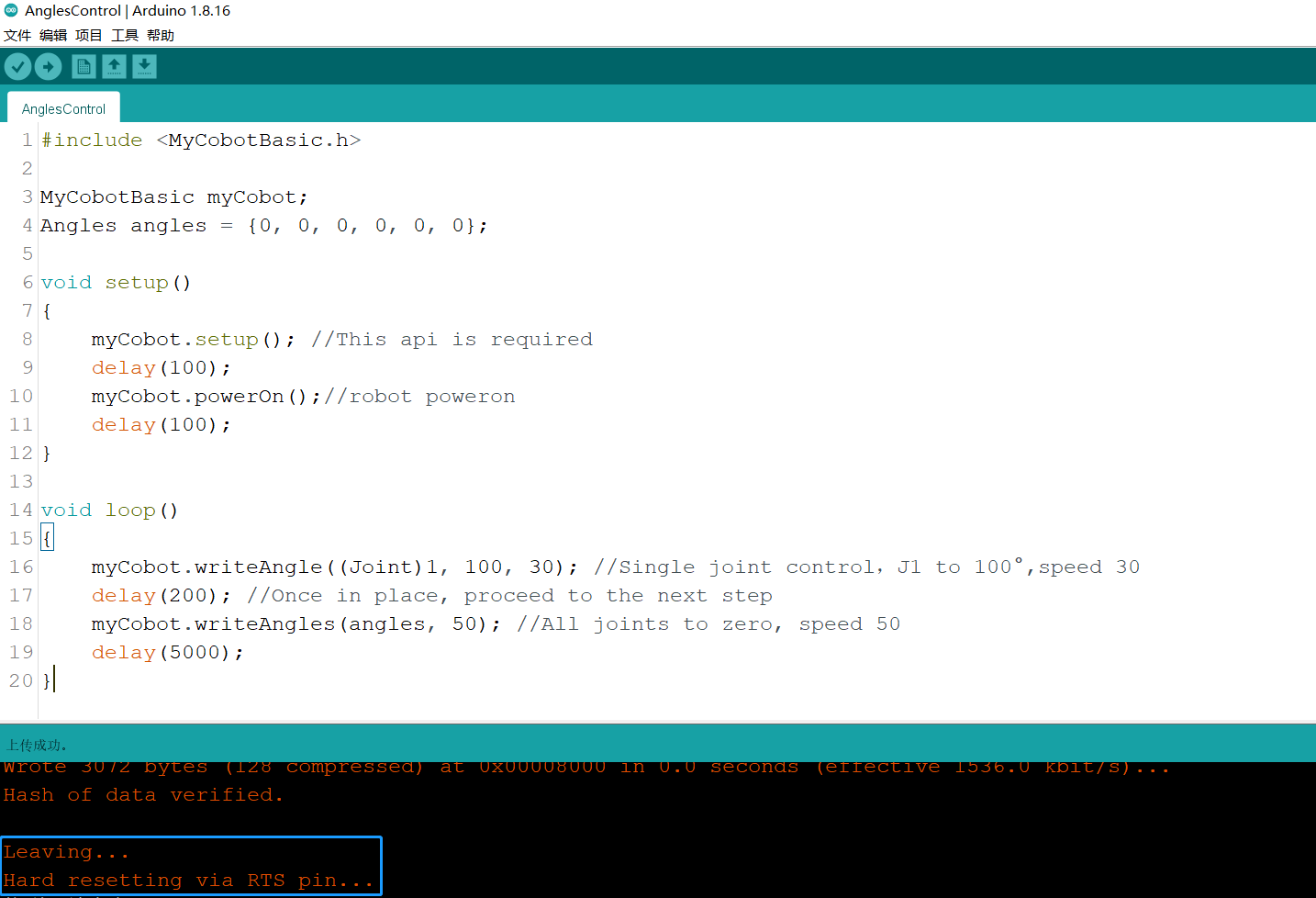
这时我们就能看到 机器人 开始工作。
有关basic按键与屏幕使用的接口和驱动可参考如下文档:
按键: https://docs.m5stack.com/en/api/core/button
屏幕: https://docs.m5stack.com/en/api/core/lcd
5 部分案例介绍
5.1 目前不同机型都有角度、坐标、夹爪控制,MyCobot320支持自适应夹爪与电动夹爪控制。
5.2 miniRobot:
myCobot280、320m5、mechArm270-M5使用案例,可以进行零位校准、拖动示教、通讯等(在此基础上,使用RoboFlow、python、myblockly等控制机械臂)、信息获取(获取舵机 atom连接状态、以及basic、atom固件版本)。
5.3 Transponder:
myCobot280-Arduino uno和Mega2560开发板使用案例,功能主要是通讯,在此基础上,使用RoboFlow、python、myblockly等控制机械臂,进行io控制。
5.4 MyPalletizerRoboFlow:
MyPalletizer260使用案例,可以进行零位校准、拖动示教、通讯(在此基础上,使用RoboFlow、python、myblockly等控制机械臂)、信息获取(获取舵机 atom连接状态、以及basic、atom固件版本)。
注意:Arduino环境配置及案例编译可以看我们的gitbook文档(https://docs.elephantrobotics.com/docs/gitbook/10-ArduinoEnv/) 和哔哩哔哩上的视频 (https://www.bilibili.com/video/BV1X3411W7Sn/)。