Arduino 库的使用
支持机械臂类型:myCobot280-Arduino
使用案例:比如打开C:\Users\User\Documents\Arduino\libraries\MyCobotBasic\examples\MyCobot280\MyCobot280_Arduino\Mega\AnglesControl\AnglesControl.ino,此案例需要先对开发板进行烧录,再与机械臂连接,否则会出现上传失败的情况。
使用底部basic库您可以在Arduino下自由开发,控制我们公司的机械臂。
1 编译前的修改
导入库文件,如果您的机械臂是myCobot280-Arduino,请检查开发板是否为Mega2560或者Uno,如果是:
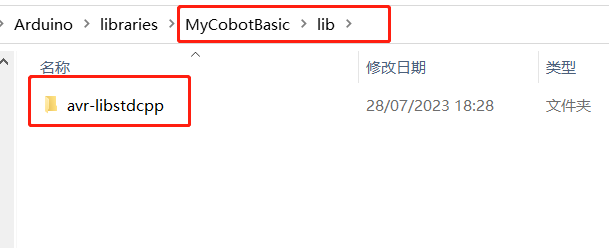
1.1 请将MyCobotBasic\lib\avr-libstdcpp放到C:\Users\User\Documents\Arduino\libraries下:

2 编译前开发板的选择
2.1 开发板为Uno、Mega2560,工具 --> 开发板 --> Arduino AVR Boards --> Arduino Uno(或者Arduino MEAG or Mega2560),具体可看下图:
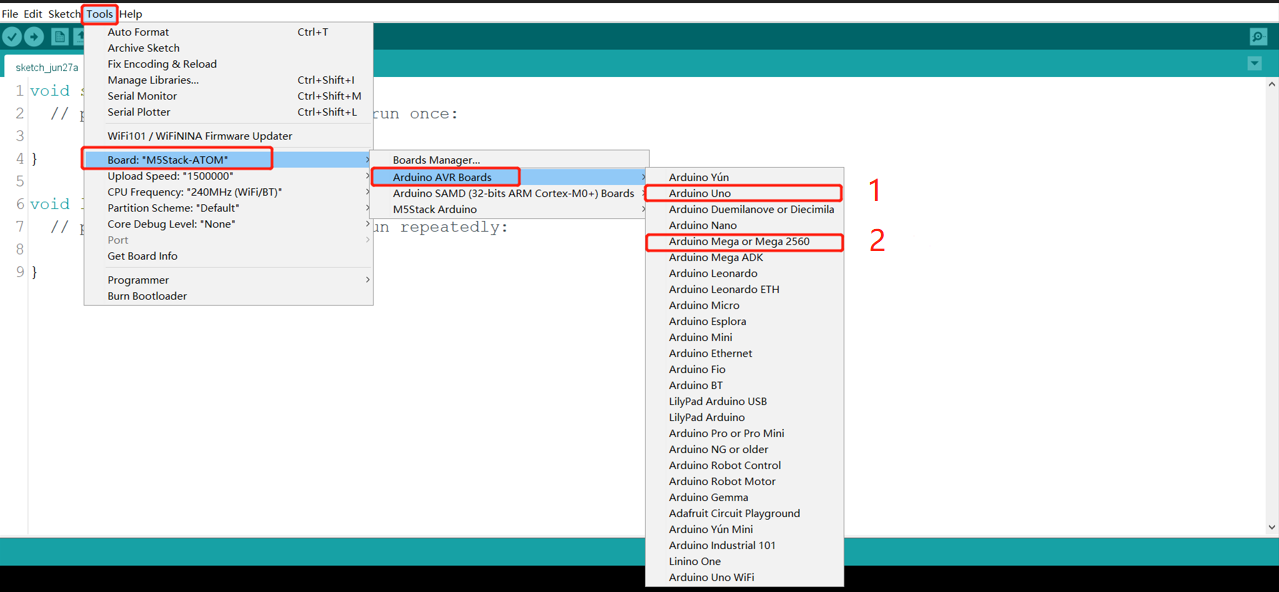
1 When using uno,select
2 When using Mega2560, select
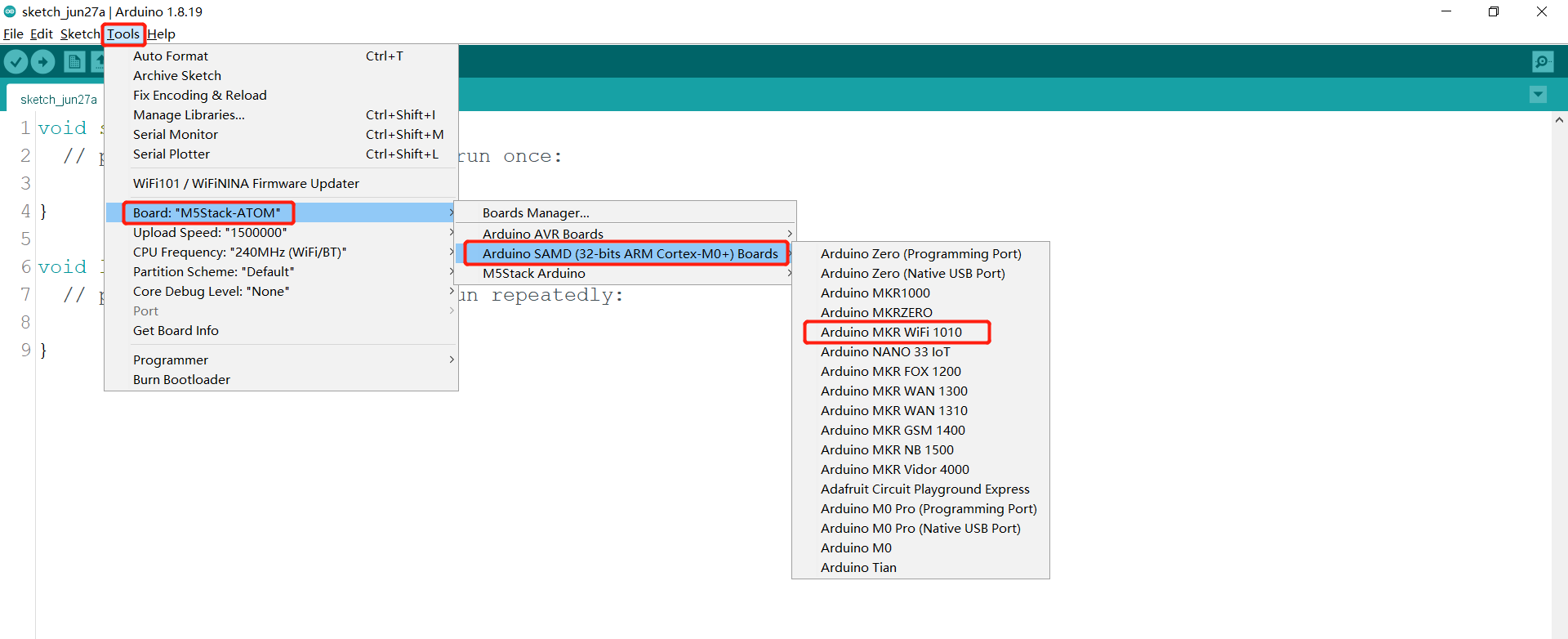
2.2 开发板为mkr wifi1010
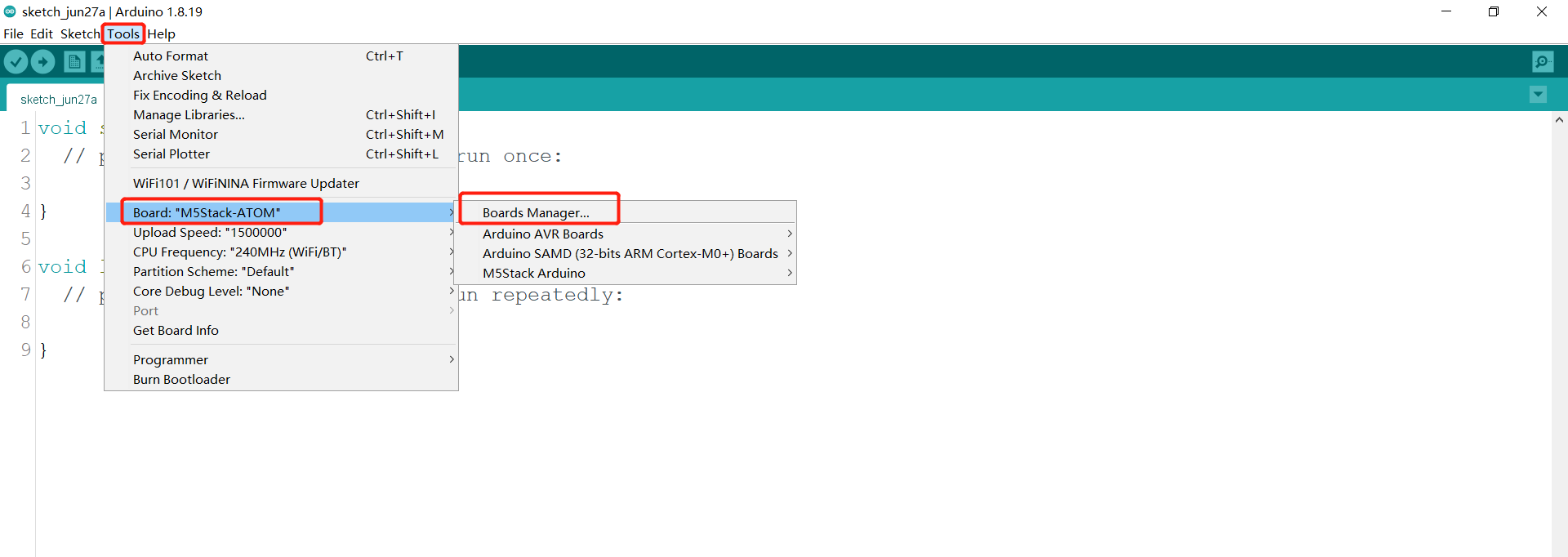
开发板管理器搜索samd,如果没有安装,就安装,首先工具 --> 开发板 --> 开发板管理器,然后搜索samd,具体可看下图:
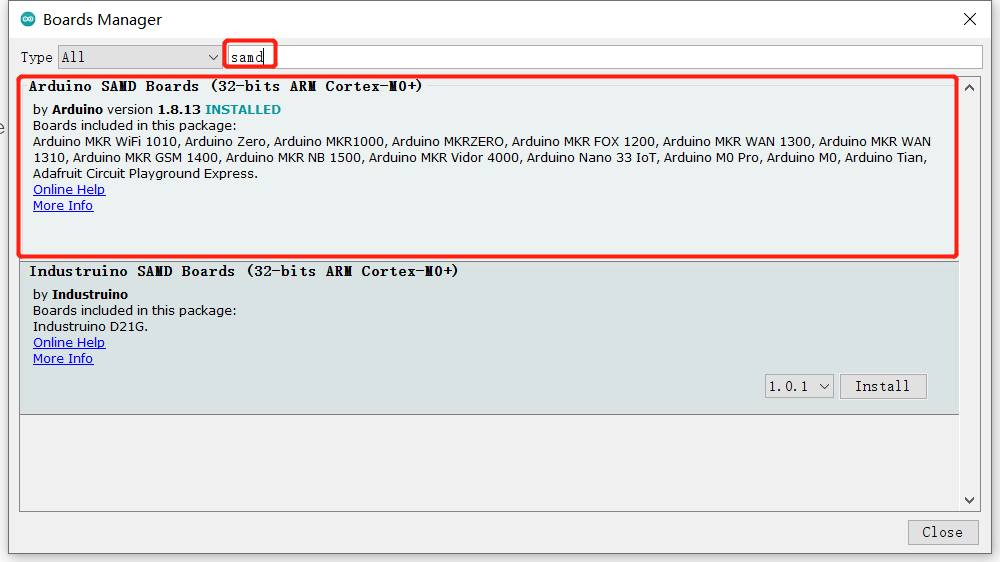
开发板选择mkr wifi1010,工具 --> 开发板 --> Arduino SAMD --> Arduino MKR WiFi1010