开发环境的搭建
1 使用环境
mechArm 270-M5版本是基于PC进行开发和使用的,机械臂内部无任何内置系统,所以在使用过程中是需要机械臂以及PC相结合,所以在使用之前请准备好一台PC。
2 开发环境
因为mechArm 270-M5版本无内置开发环境,所以需要你使用PC为机械臂安装开发环境。
以下是mechArm 270-M5版本支持的开发环境以及安装和使用教程:
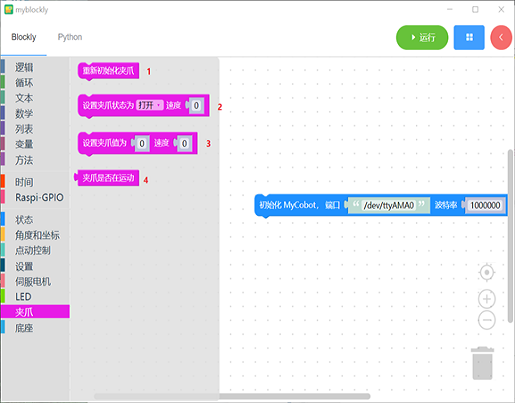
- 2.1 基于 Blockly 的开发使用 myBlockly和UIFlow均体现拖拽式编程的思想,二者都是图形化编程软件、可视化工具,用户可以通过拖曳模块,来构建代码逻辑,过程很像搭积木,用户需 安装 myblockly 后,可直接查看 myblockly使用案例。
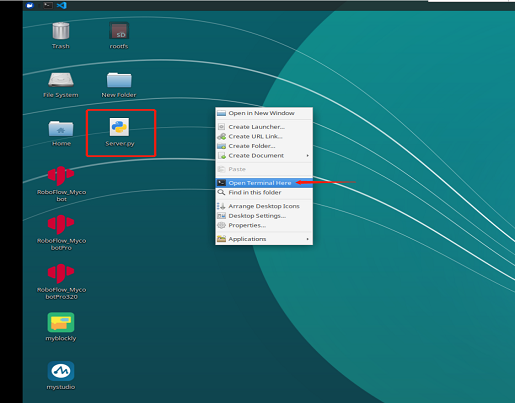
2.3 基于 Python 开发使用 我司产品对于python的支持较为友好,对于pythonAPI库的开发也日益完善,通过python能对机器人的关节角度,坐标,夹爪等多方面进行操控,选择性较多,用户在 安装python环境 后,可直接查看 使用案例。
2.4 基于 C++ 开发使用 C++是C语言的继承,它既可以进行C语言的过程化程序设计,又可以进行以抽象数据类型为特点的基于对象的程序设计,还可以进行以继承和多态为特点的面向对象的程序设计。使用c++语言,您可以通过我们公司开发的c++动态库,进行自由开发(坐标控制、角度控制、io控制、夹爪控制等),控制我们公司已经研发出来的部分机器人。用户在 安装C++环境 后,可直接查看 使用案例。

2.5 基于 C# 开发使用 C#是微软公司发布的一种由C和C++衍生出来的面向对象的编程语言、运行于.NET Framework和.NET Core(完全开源,跨平台)之上的高级程序设计语言。使用c#语言,您可以通过我们公司提供的c#动态库,进行自由开发(坐标控制、角度控制、io控制、夹爪控制等),控制我们公司已经研发出来的部分机器人。用户在 安装C#环境 后,可以直接查看 使用案例。

-
Arduino 是一款简单易用、便于上手的开源电子原型平台,包含硬件部分(各种符合 Arduino 规范的开发板)和软件部分( Arduino IDE 和相关的开发包)。 硬件部分(或称开发板)由微控制器(MCU)、闪存(Flash)以及一组通用输入/输出接口(GPIO)等构成,你可以将它理解为是一块微型电脑主板。 软件部分则主要由PC端的 Arduino IDE 以及相关的板级支持包(BSP)和丰富的第三方函数库组成。使用者可以借由 Arduino IDE 轻松地下载你所持有的开发板相关的BSP和需要的函数库,用于编写你的程序。用户 安装Arduino环境 后,可以直接查看 Arduino简单使用。

2.7 基于 JavaScript 开发使用 JavaScript是一种运行在客户端的脚本语言;不需要编译,运行过程中由js解释器逐个进行解释并执行。使用JavaScript语言,可以通过我们公司的生态库,对我们的部分机器人进行控制。用户在 安装JavaScript环境 后,可以直接查看 使用案例。

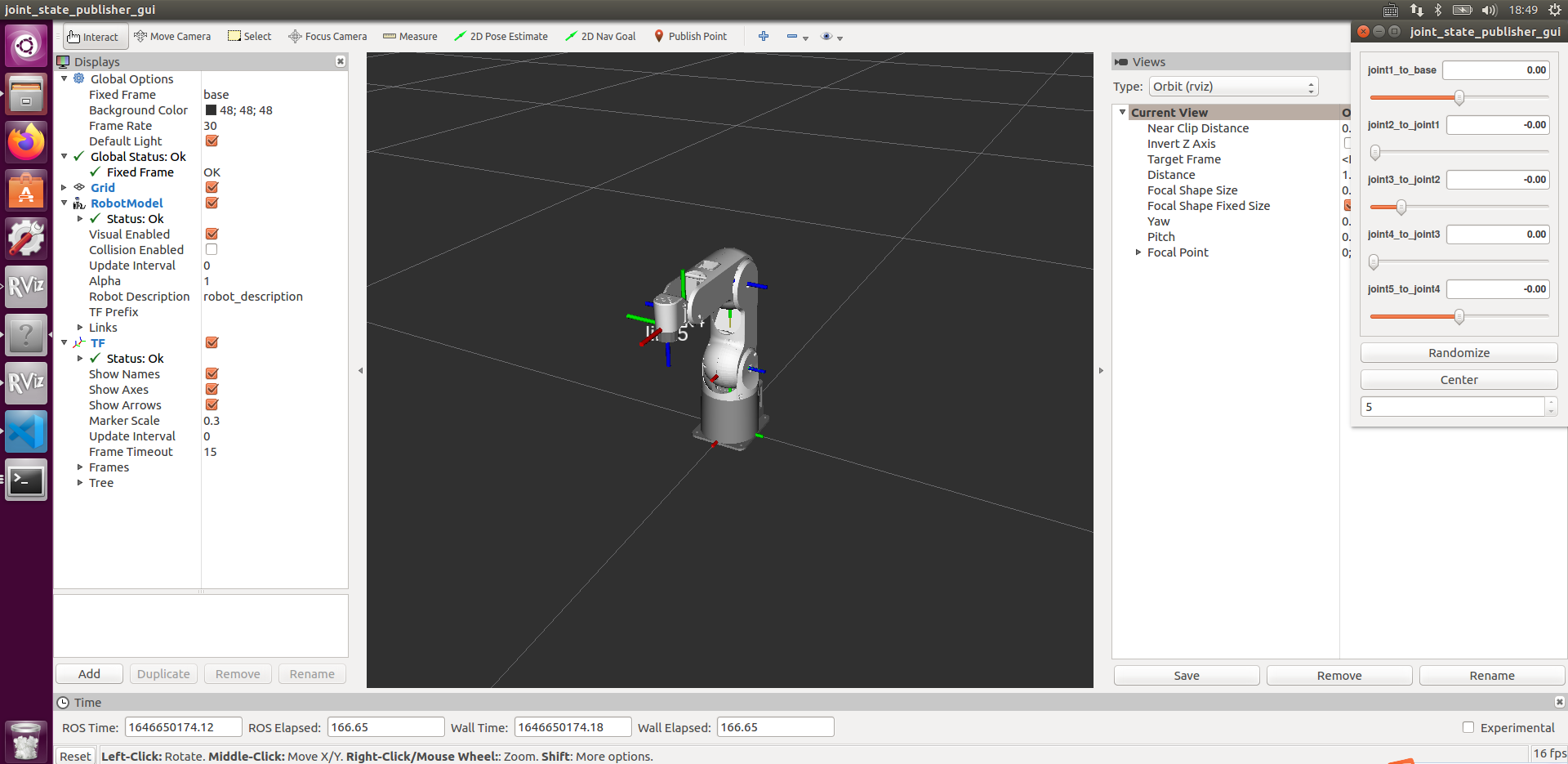
2.8 基于 ROS 开发使用 ROS 是开源的,是用于机器人控制的一种后操作系统,或者说次级操作系统。通过ROS,我们能够在虚拟环境中实现对机械臂的仿真控制。我们将通过 rviz 平台实现对机械臂的可视化,并使用多种方式对我们的机械臂进行操作;通过moveit 平台进行机械臂行动路径的规划和执行,达到自由控制机械臂的效果。用户在 安装ROS开发环境 后,即可查看 使用案例 和 moveit的使用。
3 固件的更新
mechArm 270-M5版本的M5Stack-basic固件以及Atom固件的更新需要使用myStudio进行更新。
myStudio的安装和使用教程: