Mycobot.csharp案例编译运行
1 下载
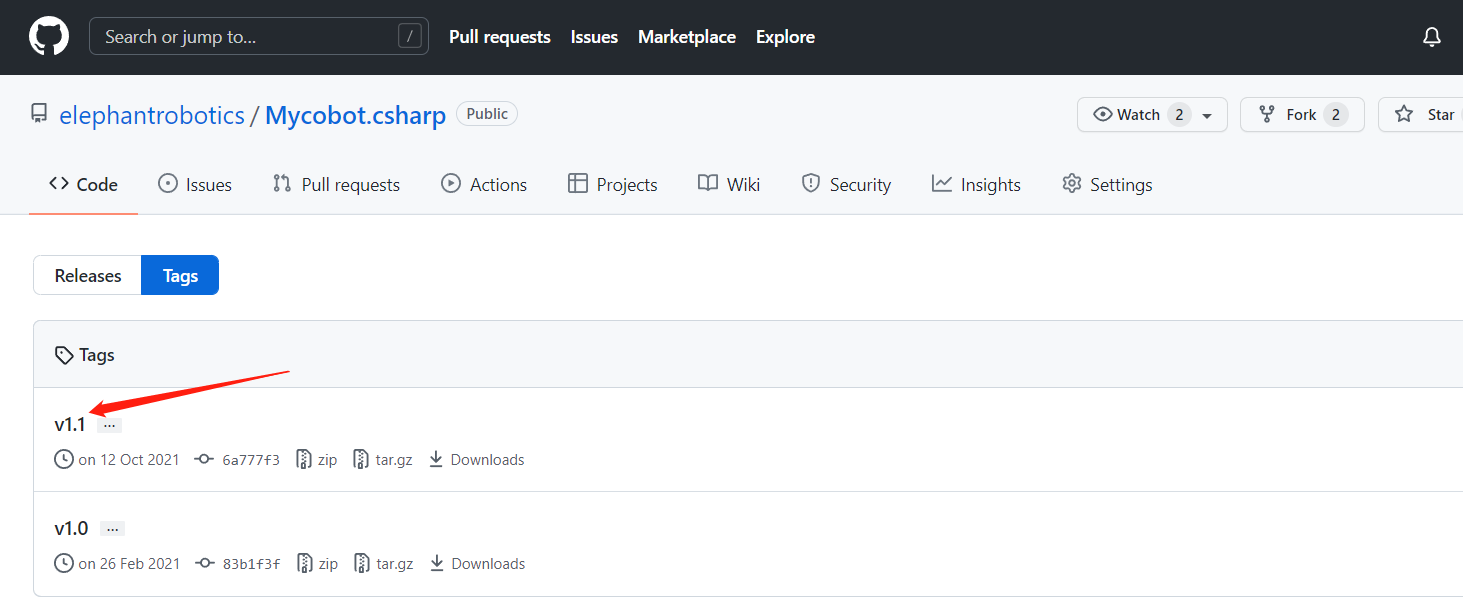
1.1 源码下载
github上下载Mycobot.csharp。
1.2 动态库下载
运行案例,需要用到此动态库,它封装了控制机械臂的API:
选择最新版本,具体如下图所示:
动态库分Windows(Windows分.net和.net framework,如何区分,请看下面的Windows下运行)和树莓派系统版本,具体如下图所示:
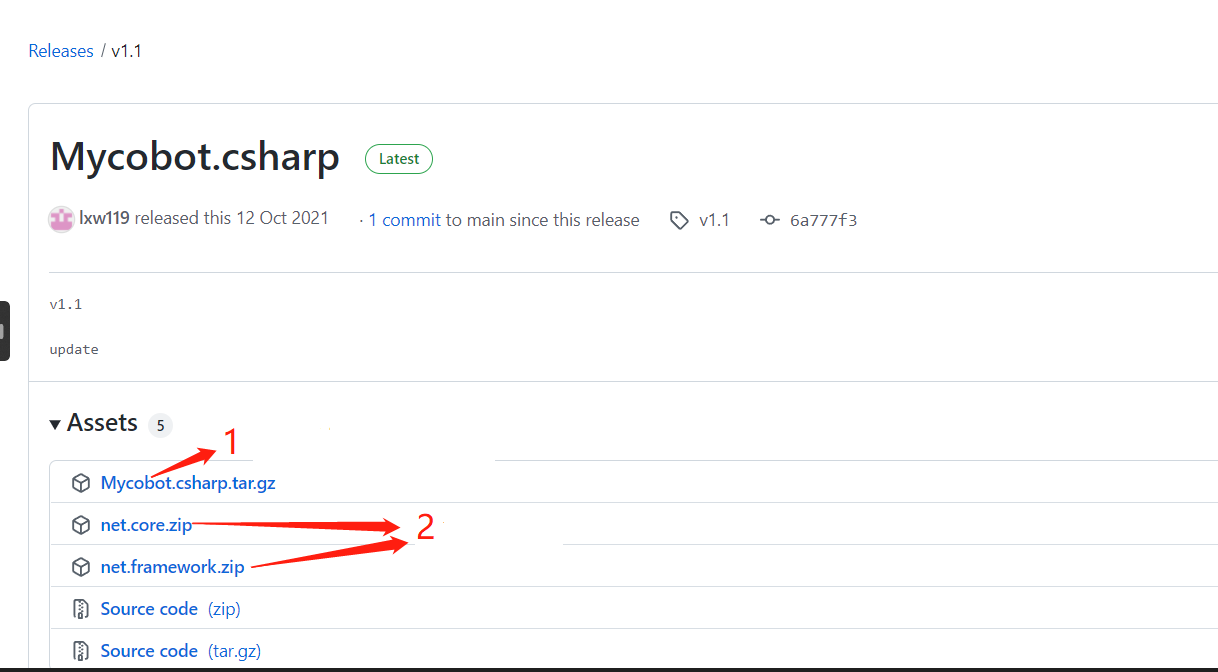
1 适用于树莓派机械臂系统
2 适用于Windows系统
2 Windows下运行
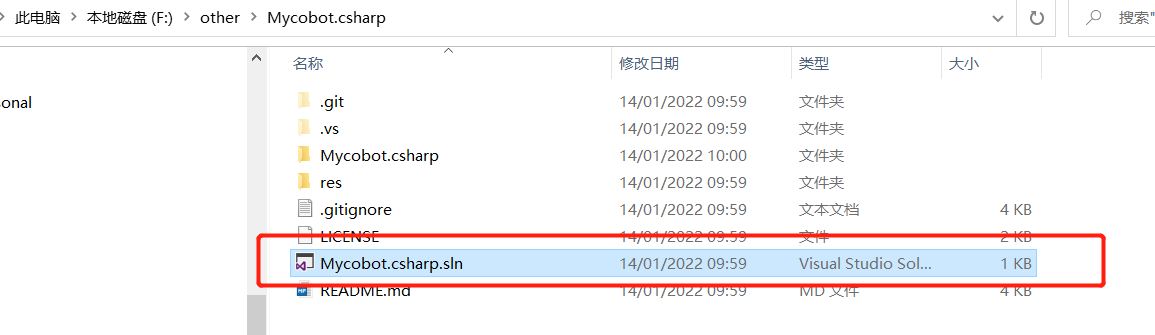
2.1 直接运行github下载的Mycobot.csharp案例:
双击打开Mycobot.csharp.sln(确保电脑安装了vs2019,如果未安装,请看9.1环境搭建)
编译运行项目,查看机械臂串口号,如果与示例不一致,请修改串口号,具体可看下图:
2.2 在自己的项目中调用Mycobot.csharp动态库:
检查项目的目标框架,然后下载相应动态库。如果你项目的目标框架(target frame)是.net core,下载 net core/Mycobot.csharp.dll,如果目标框架是.net framework,下载 net framework/Mycobot.csharp.dll)
导入Mycobot.csharp.dll到项目中
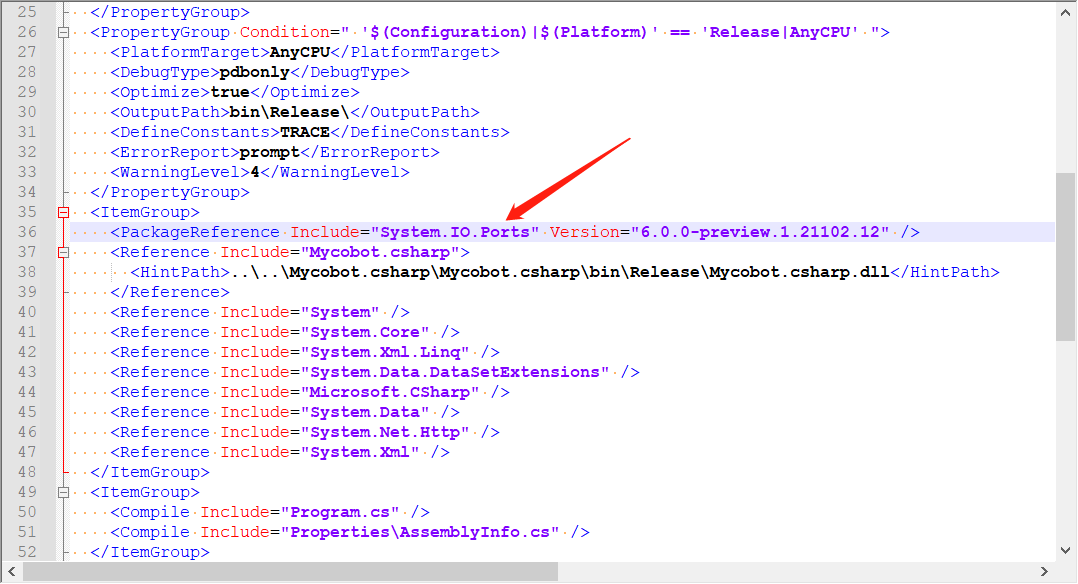
添加system.io.ports到 .csproj( 项目名称,该文件位于项目目录中),具体请看像下面的图片:
frame: .net core
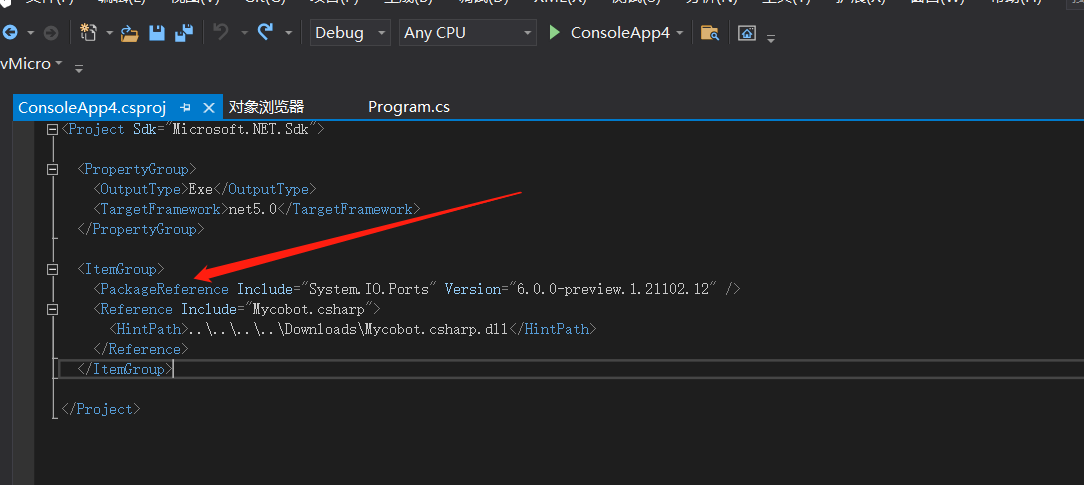
frame: .net framework
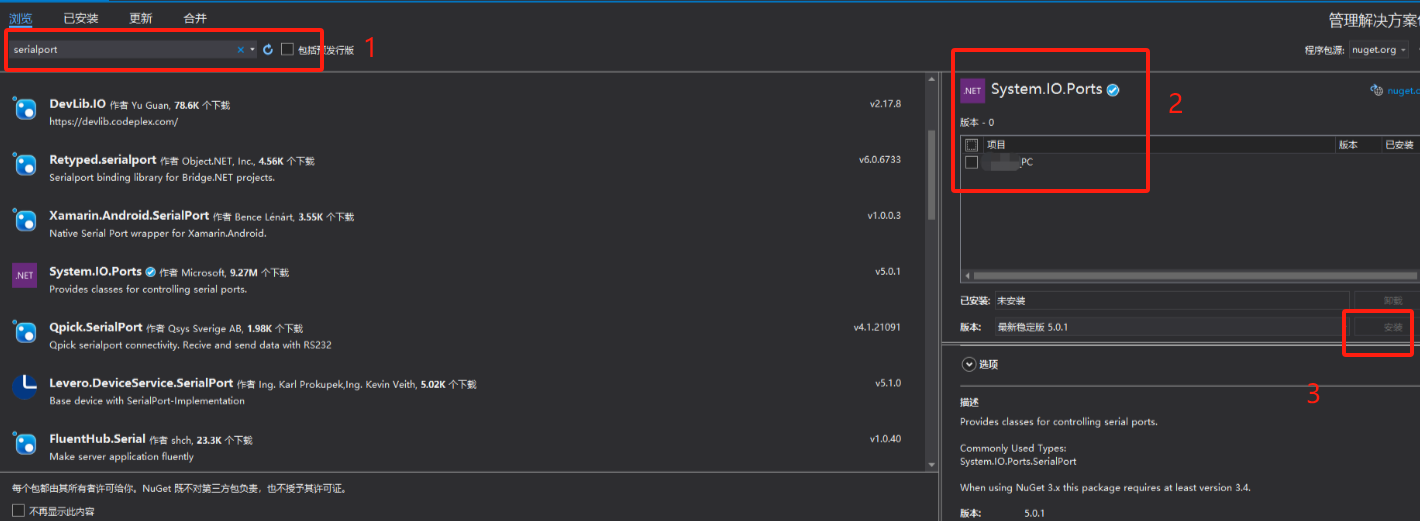
在vs2019以前的版本,只要using System.IO.Ports就可以用SerialPort。如果显示错误:未能在命名空间中找到对应类型名,则需要给项目配置对应的dll,方法如下:
工具–>Nuget包管理器(N)–>管理解决方案的Nuget程序包(N) –>浏览,左边搜索栏对应的dll(例如SerialPort),右边勾选要添加的项目,点击下载安装。
关于库函数的使用可以查看9.7 Mycobot API、9.8使用案例和后面章节关于关节、坐标等的单独使用。
2.3 问题
在使用过程中可能碰到的问题:
问题1 : System.Runtime, Version=5.0.0.0, Culture=neutral, PublicKeyToken=b03f5f7f11d50a3a' or one of its dependencies...
解决:更新你的sdk(if .net core,update to 5.0 and choose,if .net framework update to 4.0 and choose 4.7.2),看下面的动图:
问题2 :System.IO.FileNotFoundException:“Could not load file or assembly 'System.IO.Ports, Version=6.0.0.0, Culture=neutral, PublicKeyToken=cc7b13ffcd2ddd51'.
解决:请看上面9.2.2.2的第3步
3 树莓派机械臂上运行
3.1 创建一个 C#控制台应用程序(console application);
3.2 复制文件program.cs,然后将program.cs粘贴到新创建的C#控制台应用程序;
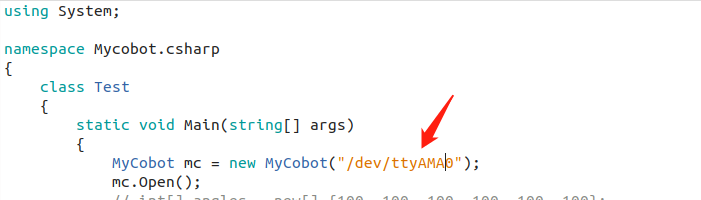
3.3 将program.cs中的端口号改为/dev/ttyAMA0(MyCobot mc = new MyCobot("/dev/ttyAMA0"));
3.4 将编译方式改为Release;
3.5 将Mycobot.csharp.dll库文件加入项目中,library:ReFerences-->Edit References-->.Net Assembly-->Browse(path for .dll)
3.6 运行.
注意:编译&&运行,整个操作过程可以看下面的动图: