机器人参数说明
第一章中,我们探讨了产品的卖点及其设计理念,为您提供了对产品高层次理解的全景视角。现在,让我们进入第二章——机器人参数说明。这一章节将是您理解产品技术细节的关键。详细了解这些技术参数,不仅可以帮助您充分认识到我们产品的先进性和实用性,而且还能够确保您能够更有效地利用这些技术来满足您的具体需求。
1. 机器人规格参数
.png)
| 指标 | 参数 |
|---|---|
| 名称 | 高精度 4 自由度智能码垛步进机械臂 |
| 型号 | ultraArm P1 |
| 自由度 | 4 |
| 有效负载 | 650g |
| 工作半径 | 360mm |
| 重复定位精度 | ±0.1mm (ISO 9283) |
| 重量 | < 4.5Kg |
| 电源输入 | DC 12V,8A |
| 使用寿命 | > 5000h |
| 工作温度 | 0°~50℃ |
| 工作环境湿度 | 5%~80% |
| 通信 | WiFi-2.4G / 蓝牙 2.4G/5G / USB 3.0 / UART / RS485 |
| 通信协议 | TCP/IP-Socket / MODBUS |
2. 结构尺寸参数
本章以毫米为距离单位,以度为角度单位。
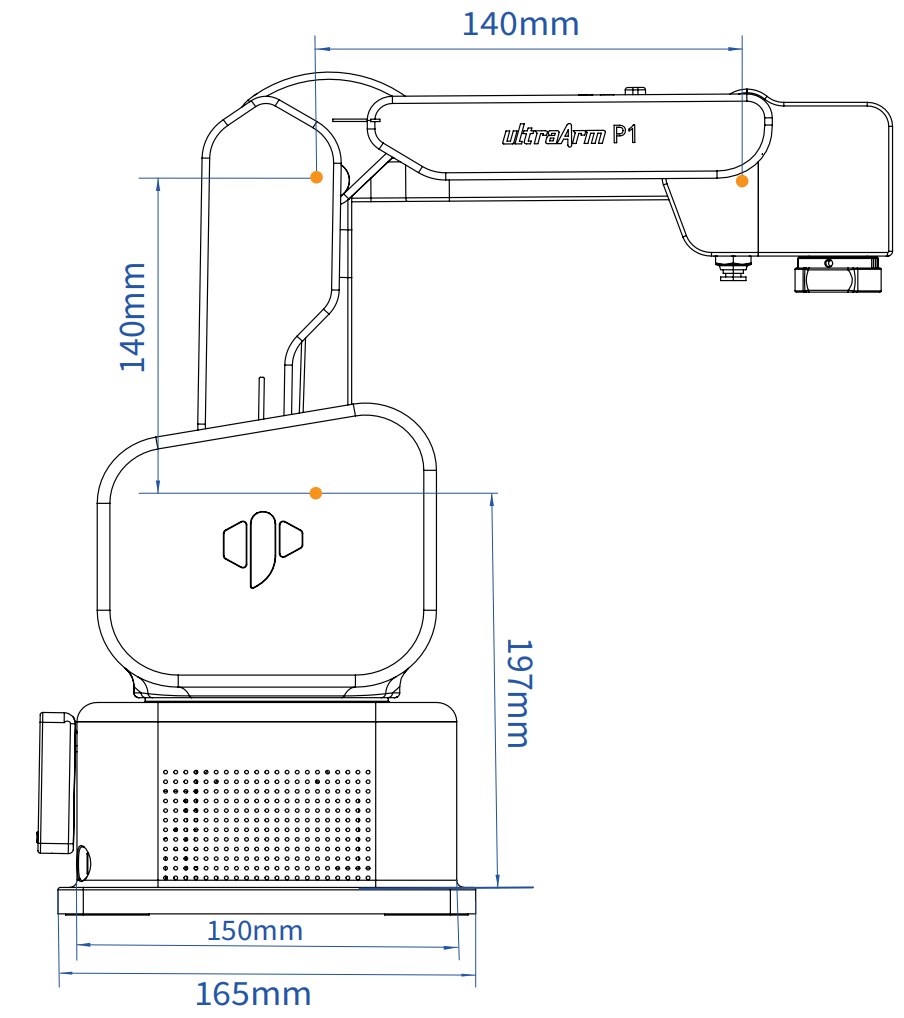
2.1 产品尺寸
2.2 关节运动范围
硬件限位
| 关节 | 范围 |
|---|---|
| J1 | -168° ~ +168° |
| J2 | -25° ~ +90° |
| J3 | +85° ~ +205° |
| J4 | -180° ~ +180° |
软件限位
| 关节 | 范围 |
|---|---|
| J1 | -158° ~ +158° |
| J2 | -18° ~ +85° |
| J3 | +89° ~ +190° |
| J4 | -179° ~ +179° |
2.3 关节最大速度
| 关节 | 最大速度 |
|---|---|
| J1 | 180°/s |
| J2 | 120°/s |
| J3 | 130°/s |
| J4 | 180°/s |
3. 机械臂底座接口说明
3.1 底座正面图:
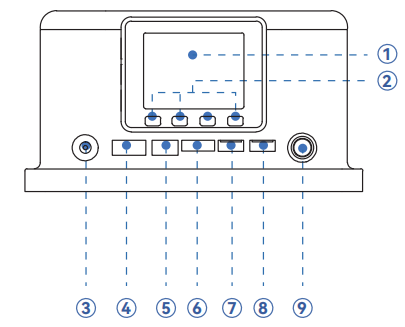
- ➀ MiniRobot 控制屏幕
- ➁ MiniRobot 按钮
- ➂ 12V 电源:连接电源适配器。
- ➃ 电机接口:用于连接和控制电机。
- ➄ 数字限位输入:用于 PNP 三线式光电/接近传感器专用输入。
- ➅ 3.3V-I/O:提供 3.3V 电源和数字信号接口。
- ➆ I²C Grove:用于连接 I²C 通信的传感器或模块。
- ➇ PWM Grove:用于连接舵机等需要 PWM 信号的设备。
- ➈ 电源开关:按下锁定为开机,再次按下释放为关机。
3.2 底座侧面图:
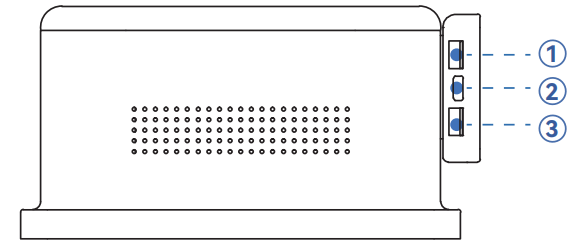
- ➀ RS485 Grove:工业串行通信,抗干扰强,距离远。
- ➁ Type-C 接口:程序烧录与通信。
- ➂ UART Grove:串口通信,连接串口设备。
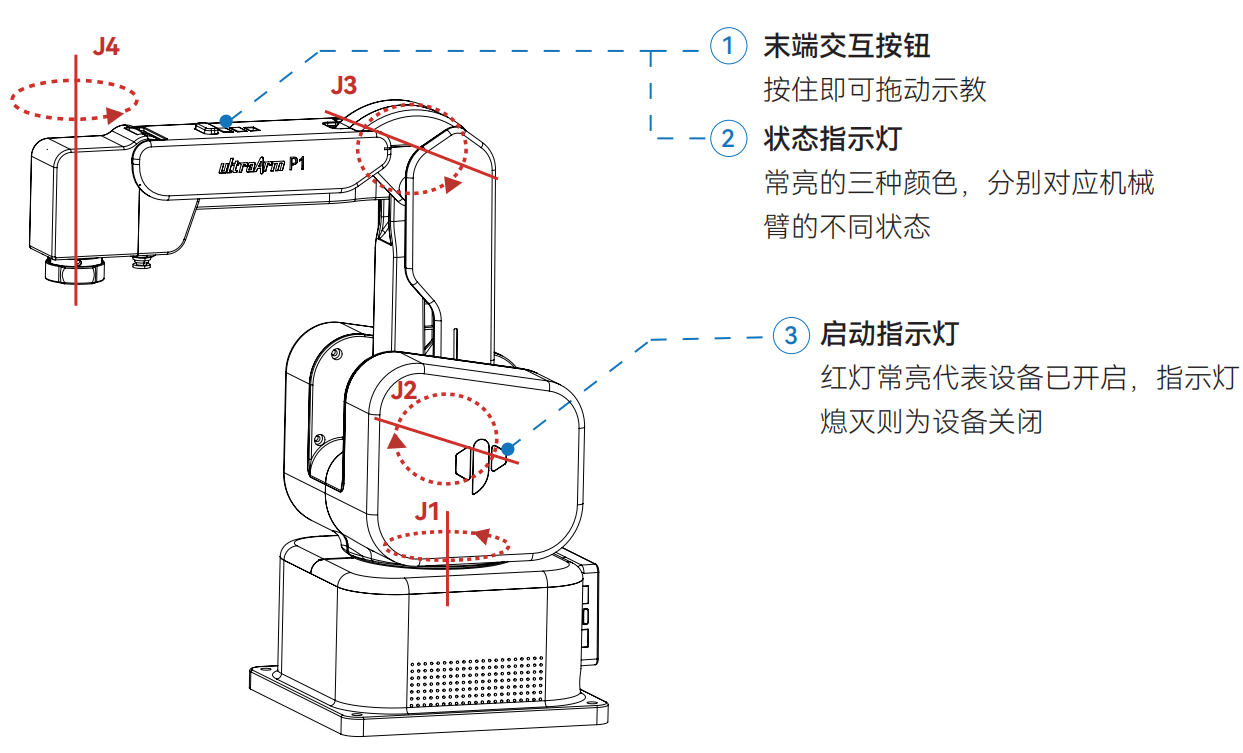
3.3 末端执行器接口说明
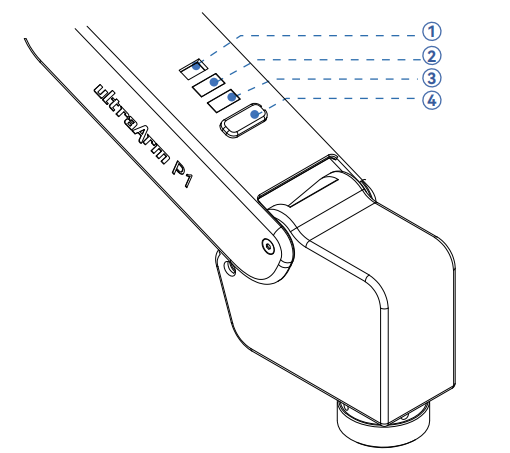
- ➀ 舵机接口:为末端舵机型执行器(如气动夹爪)提供电源与控制信号。
- ➁ Grove:支持5V数字逻辑电平输入。
- ➂ Grove:提供5V数字逻辑电平输出。
- ➃ 工具按钮:用于机器人应用的功能交互,可自定义按键功能。
4. 笛卡尔坐标
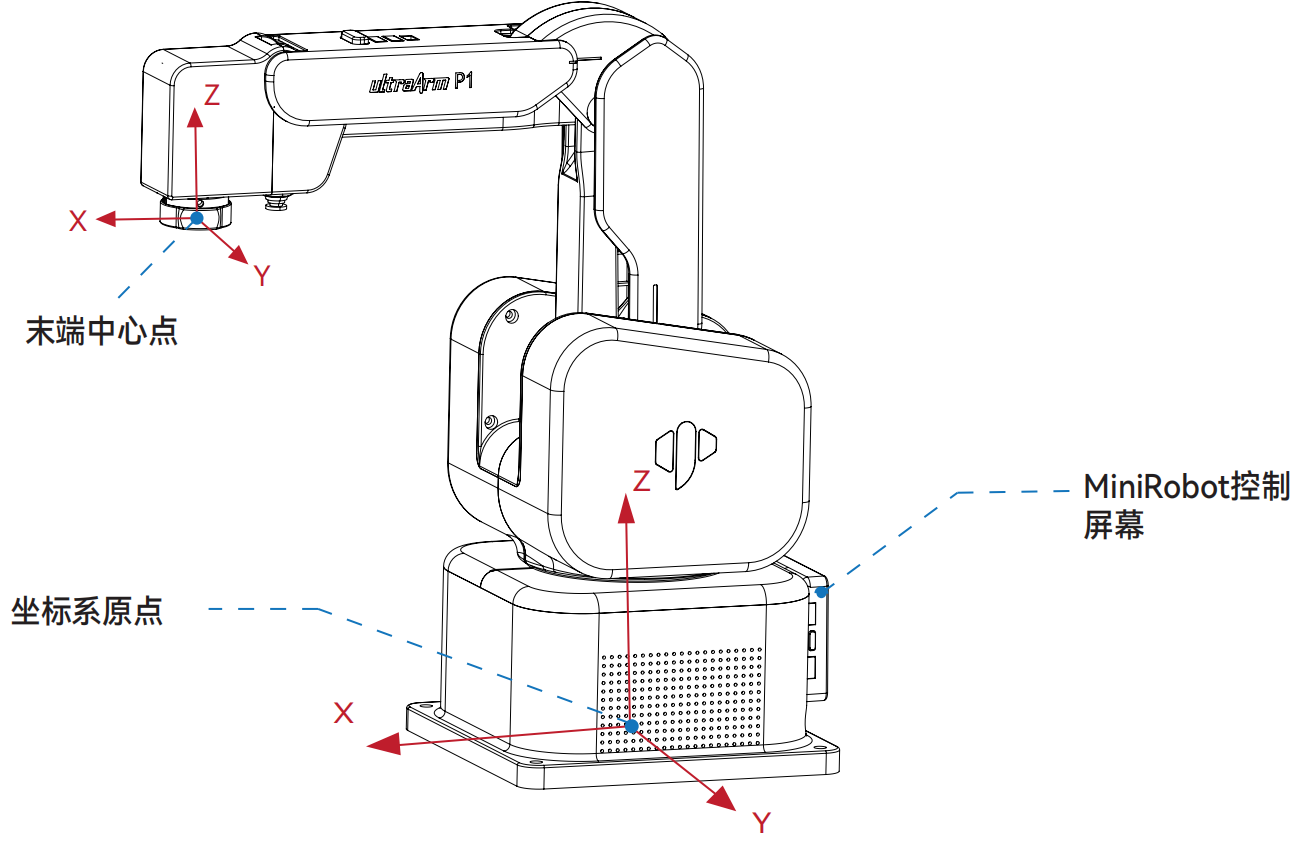
- 每个坐标系的定义如下表所示:
| 坐标系 | 定义 |
|---|---|
| 末端坐标系 | - 原点:末端快接锁头水平面中心点(图内标注:末端中心点)。 X轴:机械臂处于关节零位时,面朝底座开关,水平向前。 Y轴:机械臂处于关节零位时,面朝底座开关,水平向左。 Z轴:机械臂处于关节零位时,面朝底座开关,竖直向上。 |
| 基坐标系 | - 原点:底座底面中心点(图内标注:坐标系原点)。 X轴:面朝底座开关,水平向前。 Y轴:面朝底座开关,水平向左。 Z轴:竖直向上。 |
5. 关节坐标系
| 颜色 | 说明 |
|---|---|
| 绿色 | 正常执行程序 |
| 蓝色 | 运动学异常 |
| 红色 | 系统报错 |
6. 工作范围
6.1 工作空间示意图
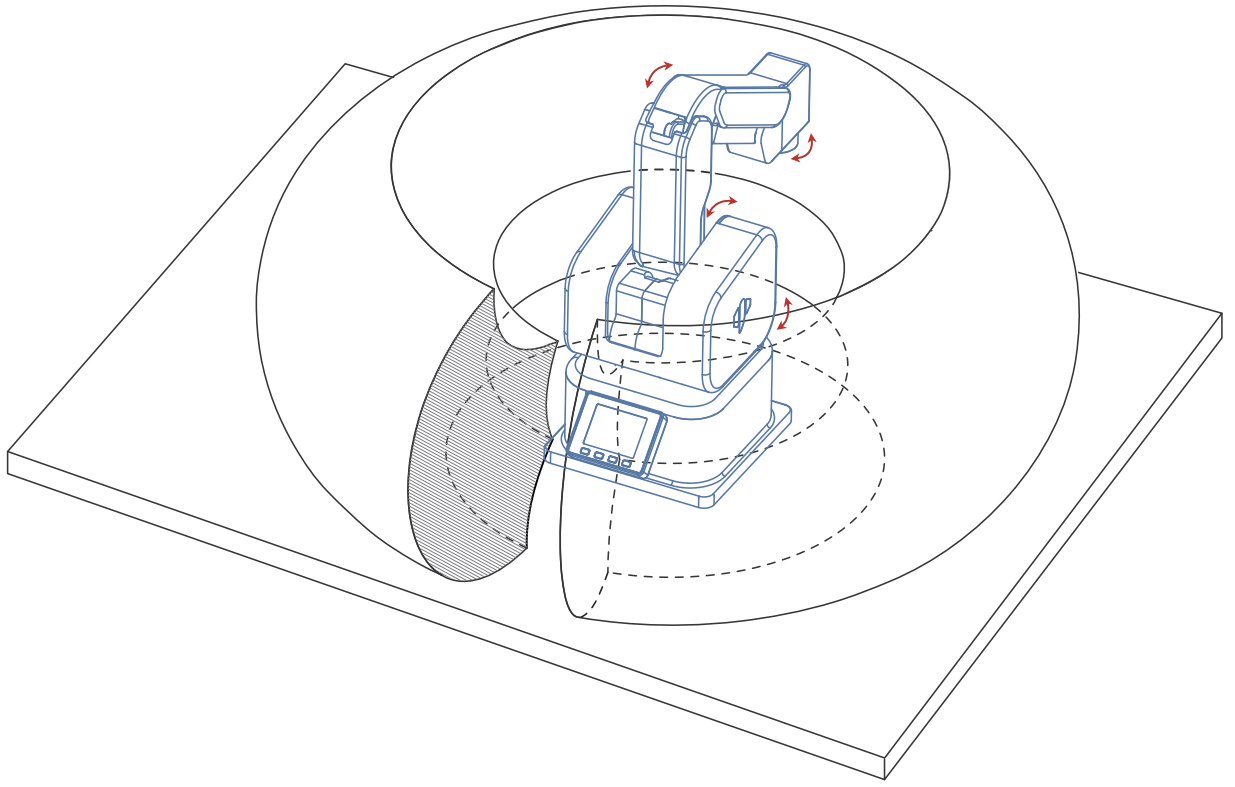
图示说明:图中环形区域定义了机械臂的3D工作空间,即末端执行器能够到达的所有空间点集合;图中红色箭头定义了机械臂各关节的运动方向。
6.2 平面工作范围
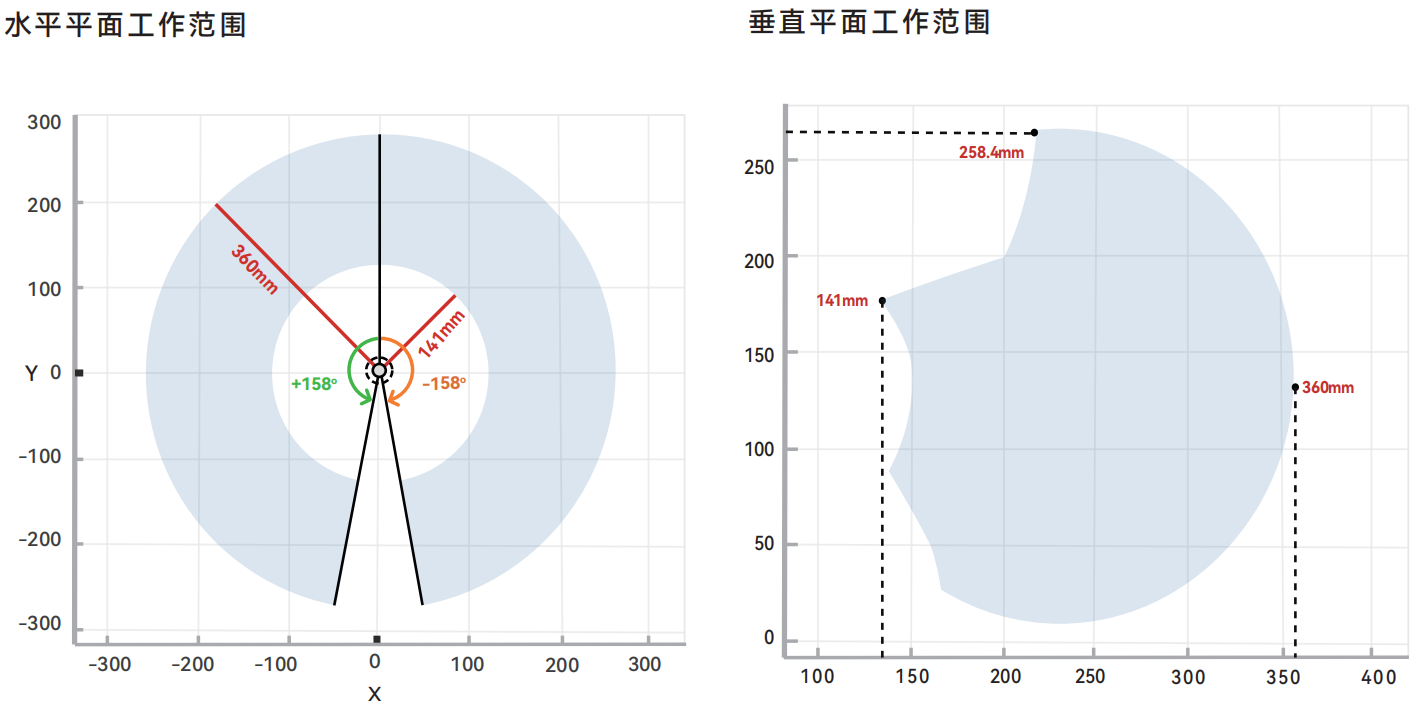
- J1可运动角度:±158°
- 最大工作半径:360mm
- 最小工作半径:141mm
- 最高工作半径:258.4mm