开机检测指南
1. 工作环境说明
在开机使用之前,请清理工作台,并准备好需要用到的工具。
- 工作环境:水平放置在承重至少大于机械臂自重 5 倍的桌面上,且不小于机械臂的工作范围,并有足够的安装、使用、维护和修理空间。
- 工具清单:ultraArm P1 机械臂主体、产品配件包等。
2. 外部线缆连接
请确认您已完成上述的结构安装并将机械臂水平放置稳固,以确保操作安全。请按照下列步骤进行连接:
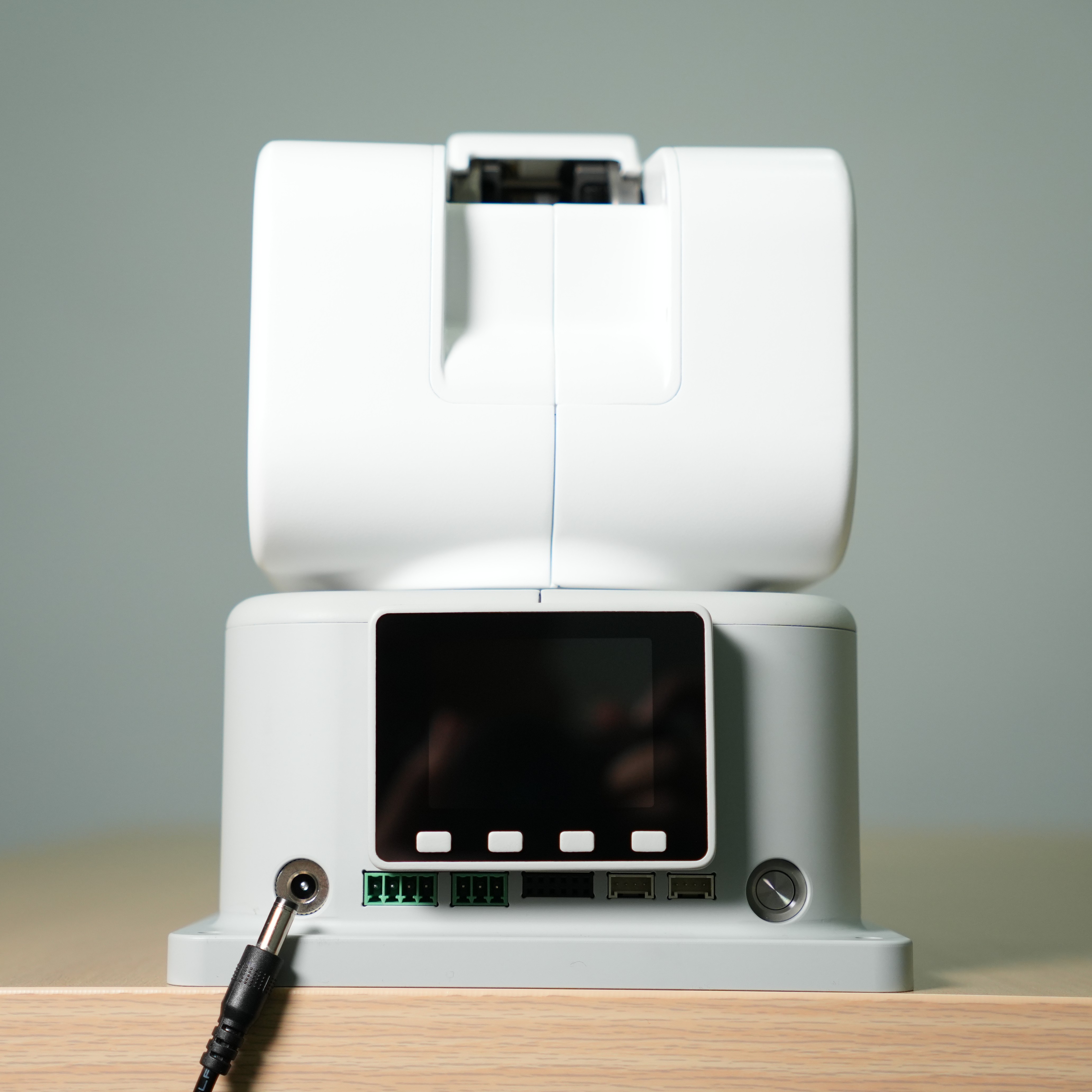
步骤 1:连接电源
将直流电源适配器(请确保使用官方适配器,DC 12V 8A 以上供电能力)与 ultraArm P1 机械臂上对应的 DC 电源接口相连,适配器另一端连接 110-220V 电源插座。
步骤 2:连接电脑
将 Type-C USB 线一端连接 ultraArm P1 机械臂的 Type-C 接口,另一端连接上位机(电脑)。


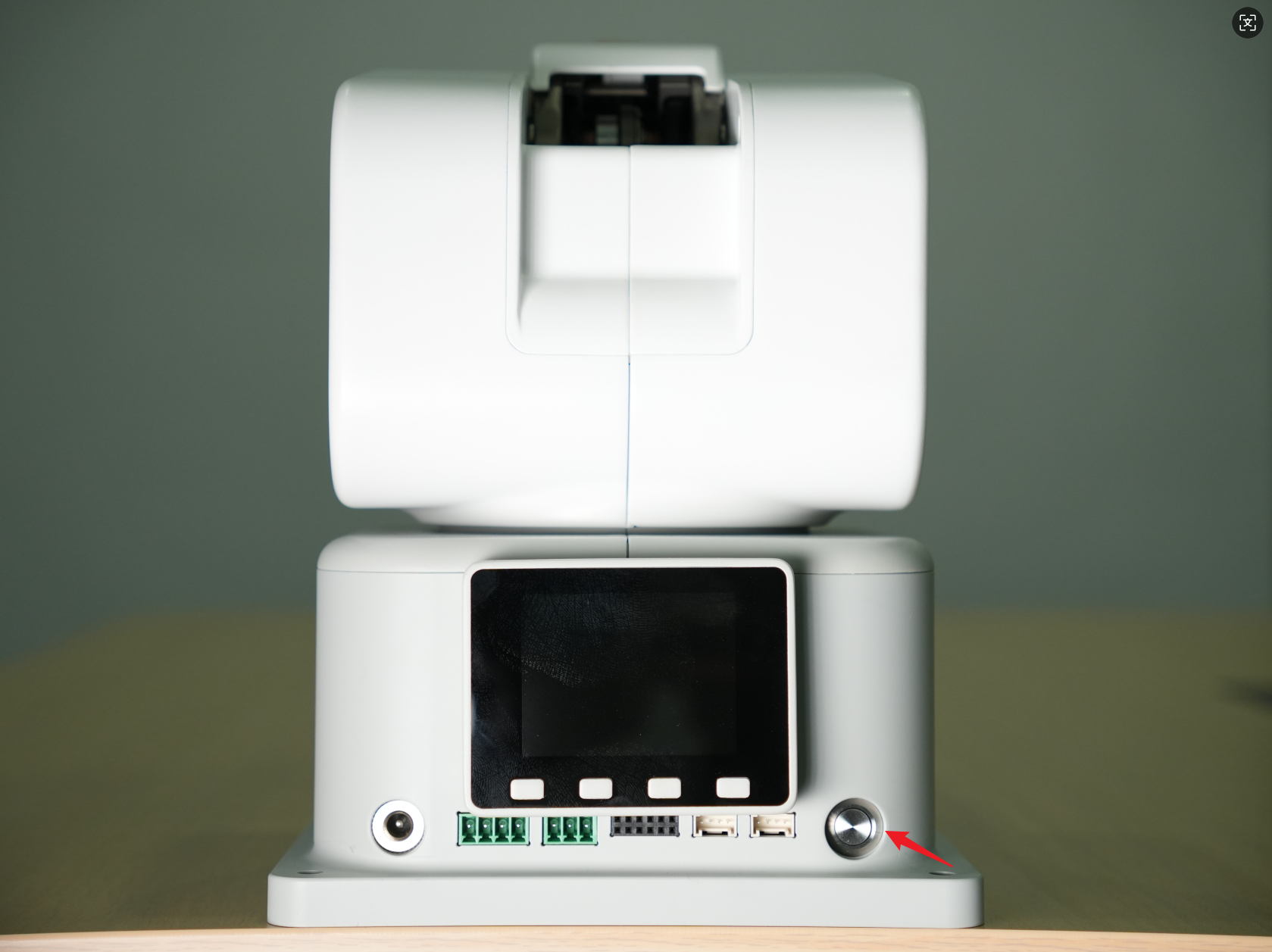
步骤 3:开机
按下电源开关键,等待5s,当小屏幕minirobot启动显示实时坐标信息并且顶部机械臂状态提示图标为绿色,则开机工作准备完成。
注意:
- 额定电压:DC 12V
- 额定电流:8A
3. 开机状态展示
确认所有必要的线缆都已插好且接口紧固后,按下电源开关。
开机后,您会看到以下正常现象:
- MiniRobot 屏幕首先展示 Logo,约 3 秒后自动进入主界面,显示当前关节角度和坐标信息。
- 界面的顶部状态提示灯会变为绿色,意为机械臂已上电。
4. 末端工具安装方式
4.1 笔夹安装方法
ultraArm P1 采用快换接头设计,夹爪、吸泵等末端工具的安装方式类似:
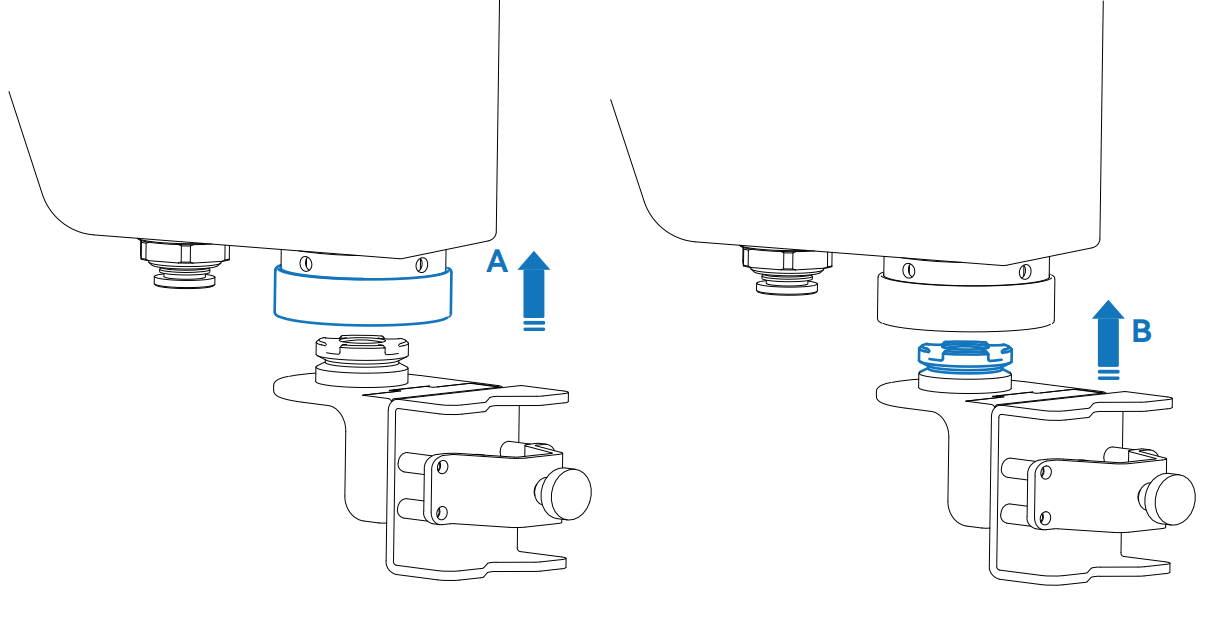
步骤 1:向上提拉快换接头上的零件 A(锁紧环)。
步骤 2:将末端工具(零件 B)的定位孔与 A 对准并嵌入。
步骤 3:松开零件 A,完成锁定。
4.1 气动夹爪安装方法
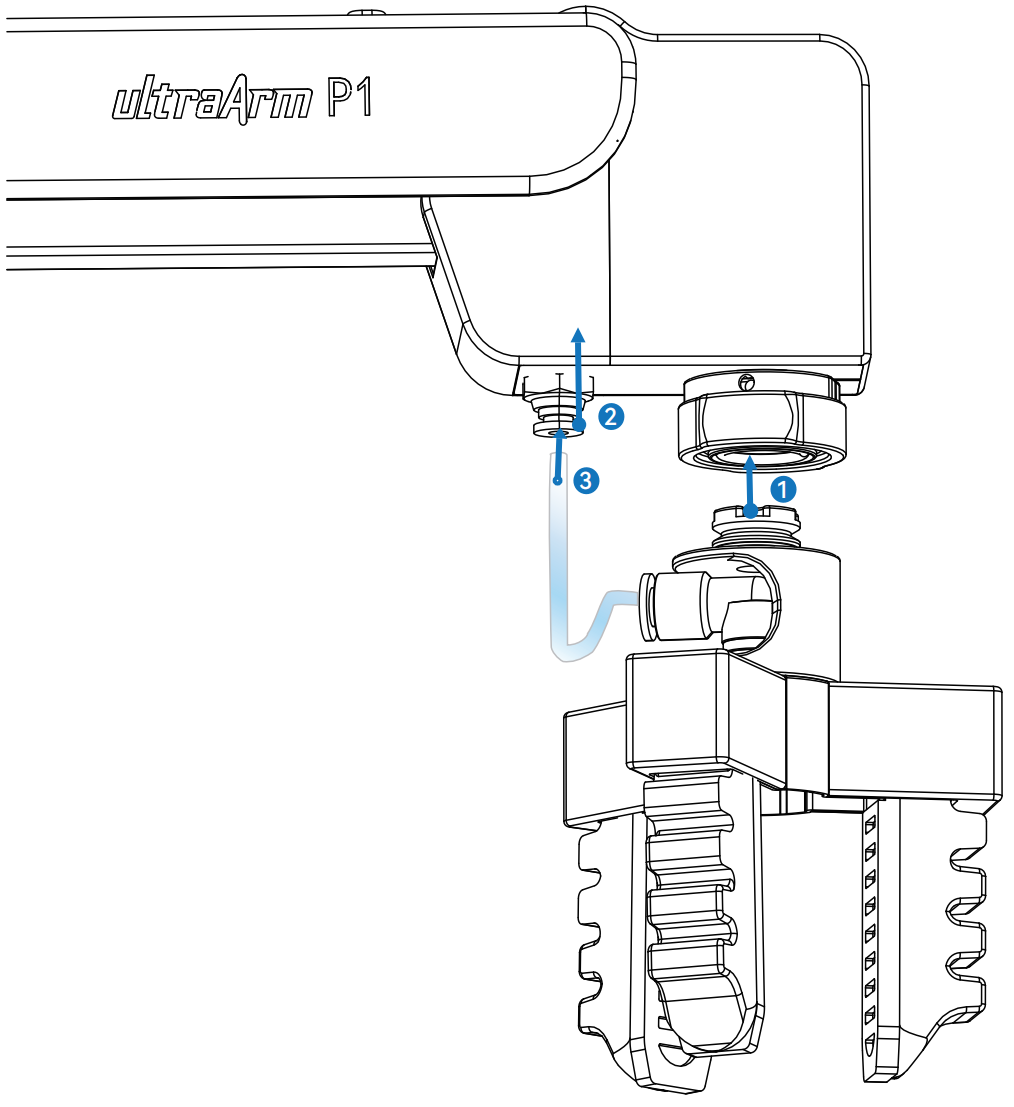
步骤 1:按照气泵快接方法将夹爪快接至机械臂。
步骤 2:将卡扣向上抬。
步骤 3:将软管接入气口,松开卡扣。
5. MiniRobot 功能说明
5.1 主界面功能说明
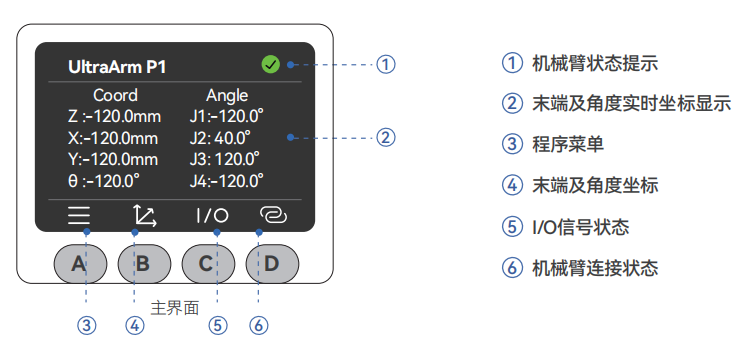
按键说明:开机后机器人自检 3 秒并默认进入主界面,可实时查看机械臂坐标;通过下方按键可切换至其他功能界面。界面下方横线标识当前所在界面。
- A 键:进入菜单界面(30 秒无操作自动返回主界面)
- B 键:显示实时角度信息和坐标信息
- C 键:显示底部 IO 的输入输出状态
- D 键:显示 WiFi、USB 和 Bluetooth 的连接状态
5.2 菜单界面功能说明
在主界面按下 A 键进入菜单界面,菜单包含以下功能:
- ➀ DragTeach(拖动示教):按住末端交互按钮即可自由拖动机械臂,支持轨迹记录与回放。
- ➁ BlocklyRunner(运行器):可选择播放已保存的轨迹文件。
- ➂ QuicklyMove(快速移动):提供自由移动与点动移动两种快速移动模式。
- ➃ Connection(通信连接):支持 WLAN / USB / Bluetooth 通信,可查看及设置连接状态。
- ➄ Firmware(固件信息):可查看机器人 ID、屏幕驱动、固件系统版本。
- ➅ Calibration(零位校准):提供逐关节手动校准模式。
- ➆ Settings(系统设置):提供错误清零和日志查看两种功能。
6. 基础功能检测
完成连接后,建议进行以下检测确认产品功能正常:
记录轨迹

注意:
- 选择存储方式:存入 RAM(临时保存,断电丢失)或存入 Flash(长期保存,断电不丢失)。
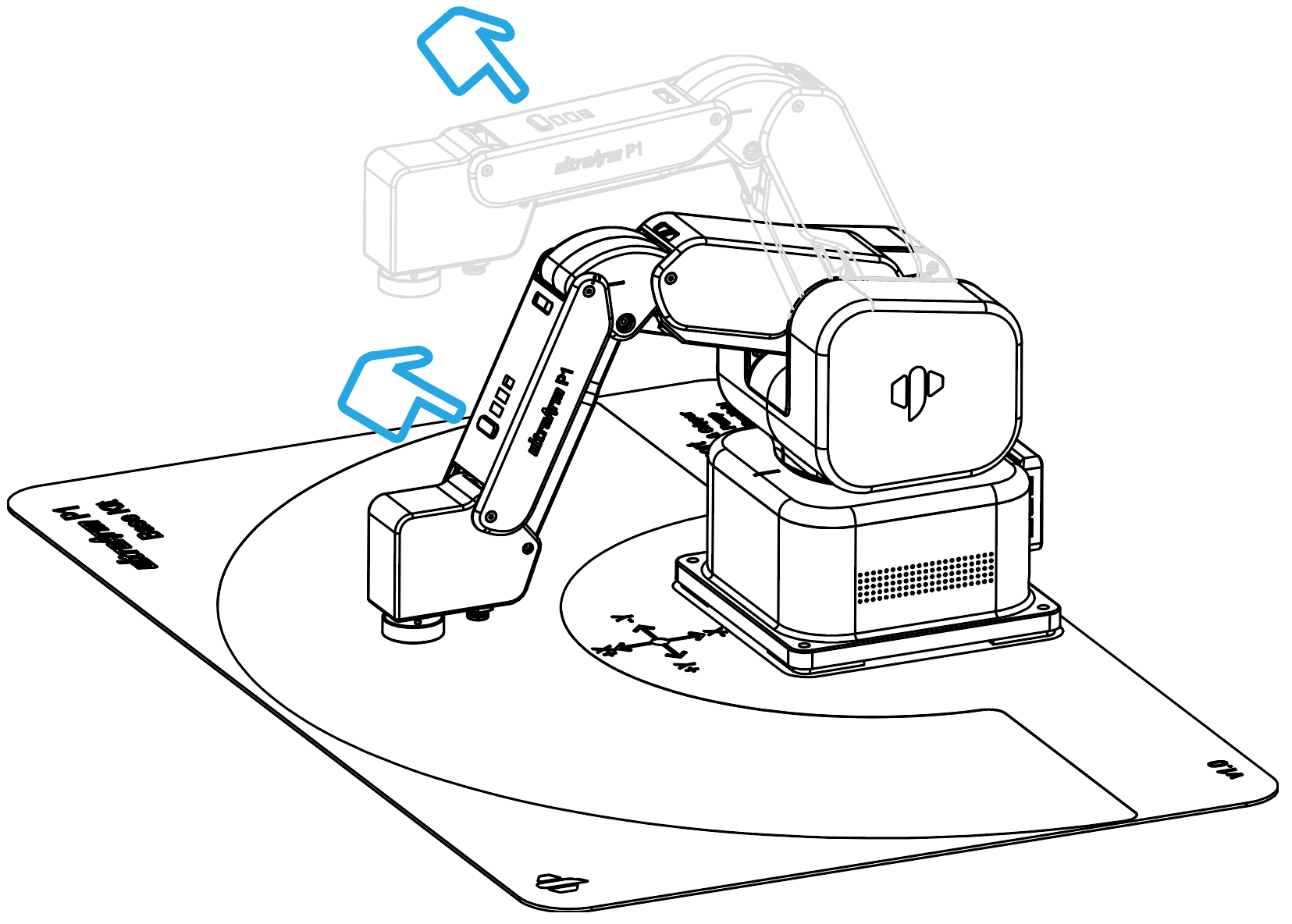
拖动机械臂
MiniRobot操作步骤3中,用户可以自由拖动机械臂形成任意姿态(不可超过机械臂关节范围)并记录轨迹,下图为举例示范: 按住末端交互按钮,即可开始拖动示教。
播放轨迹

- 若在点击轨迹播放操作之前并未进行记录轨迹操作,屏幕会出现"警告:没有可播放的轨迹文件!"的提示,用户只需返回菜单页面进行上述记录轨迹操作即可。
- 用户播放轨迹流程中执行的保存操作属长期保存。