设置
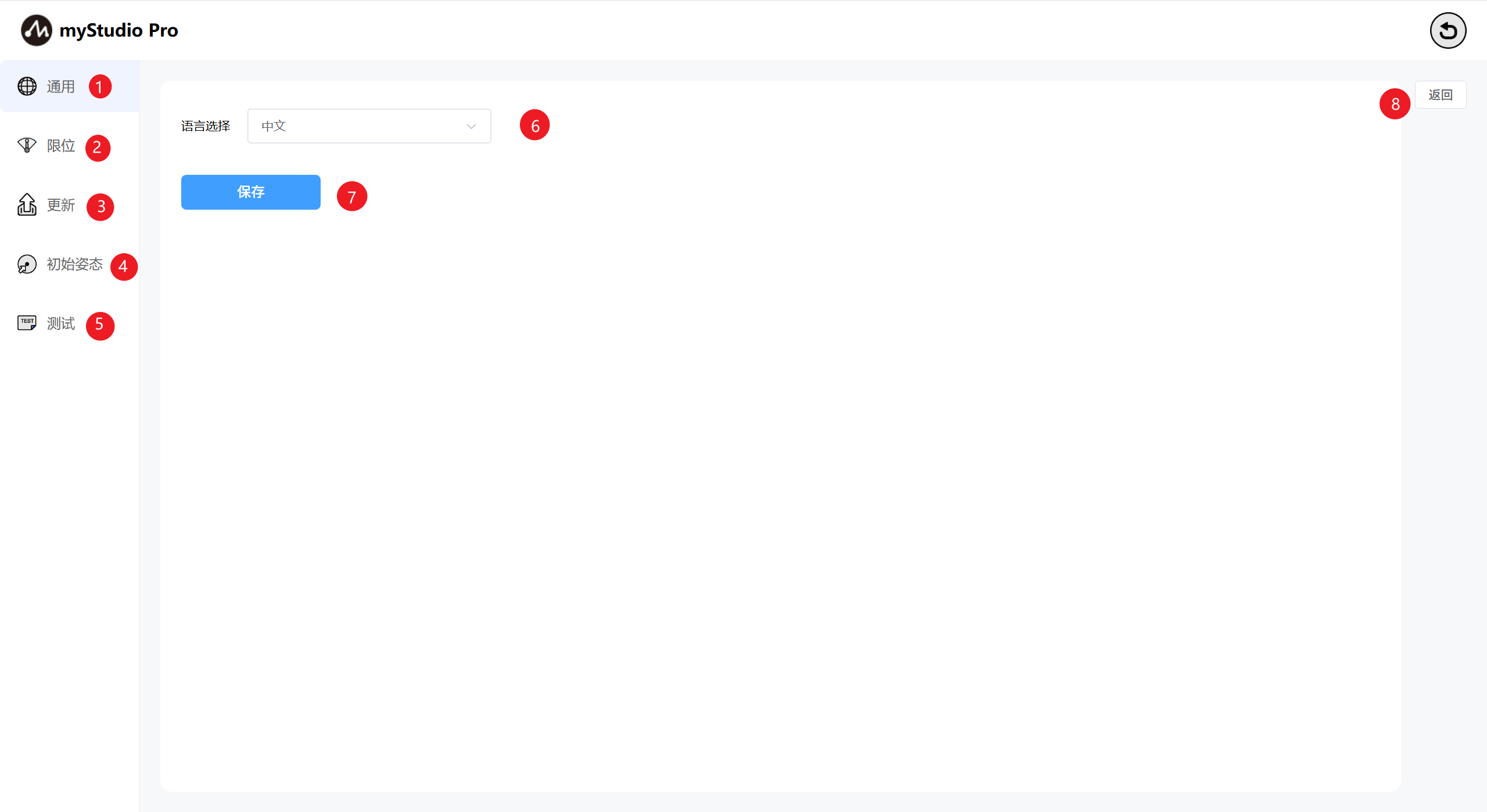
1 界面介绍
| 序号 | 功能介绍 |
|---|---|
| 1 | 通用设置模块,主要设置语言 |
| 2 | 限位设置模块 |
| 3 | 检查更新模块 |
| 4 | 初始姿态模块 |
| 5 | 测试模块 |
| 6 | 网络配置模块 |
| 7 | 账号设置模块 |
| 8 | MODBUS模块 |
| 9 | Dynamics模块 |
| 10 | 模块内容显示区域 |
| 11 | 退出设置 |
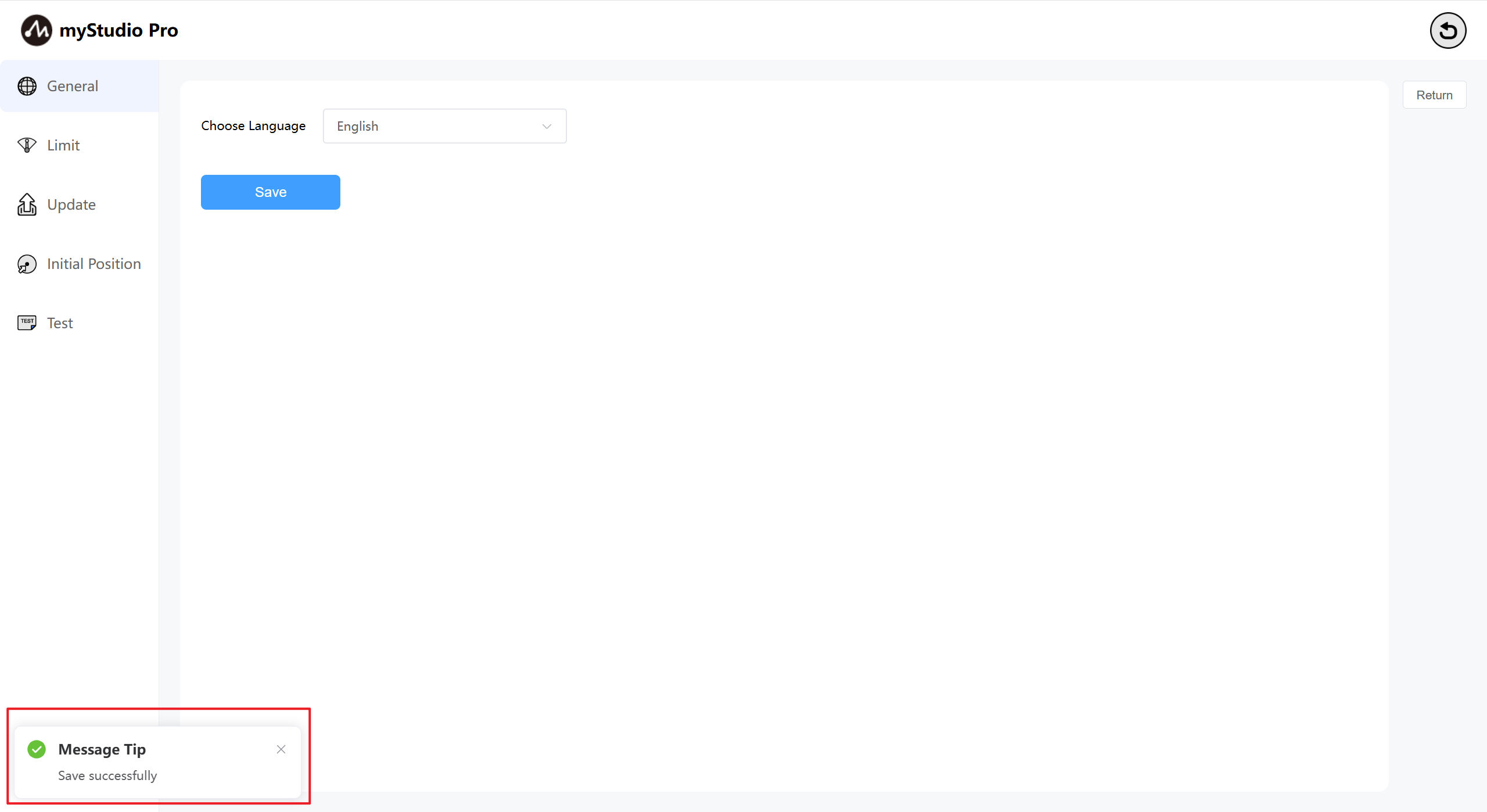
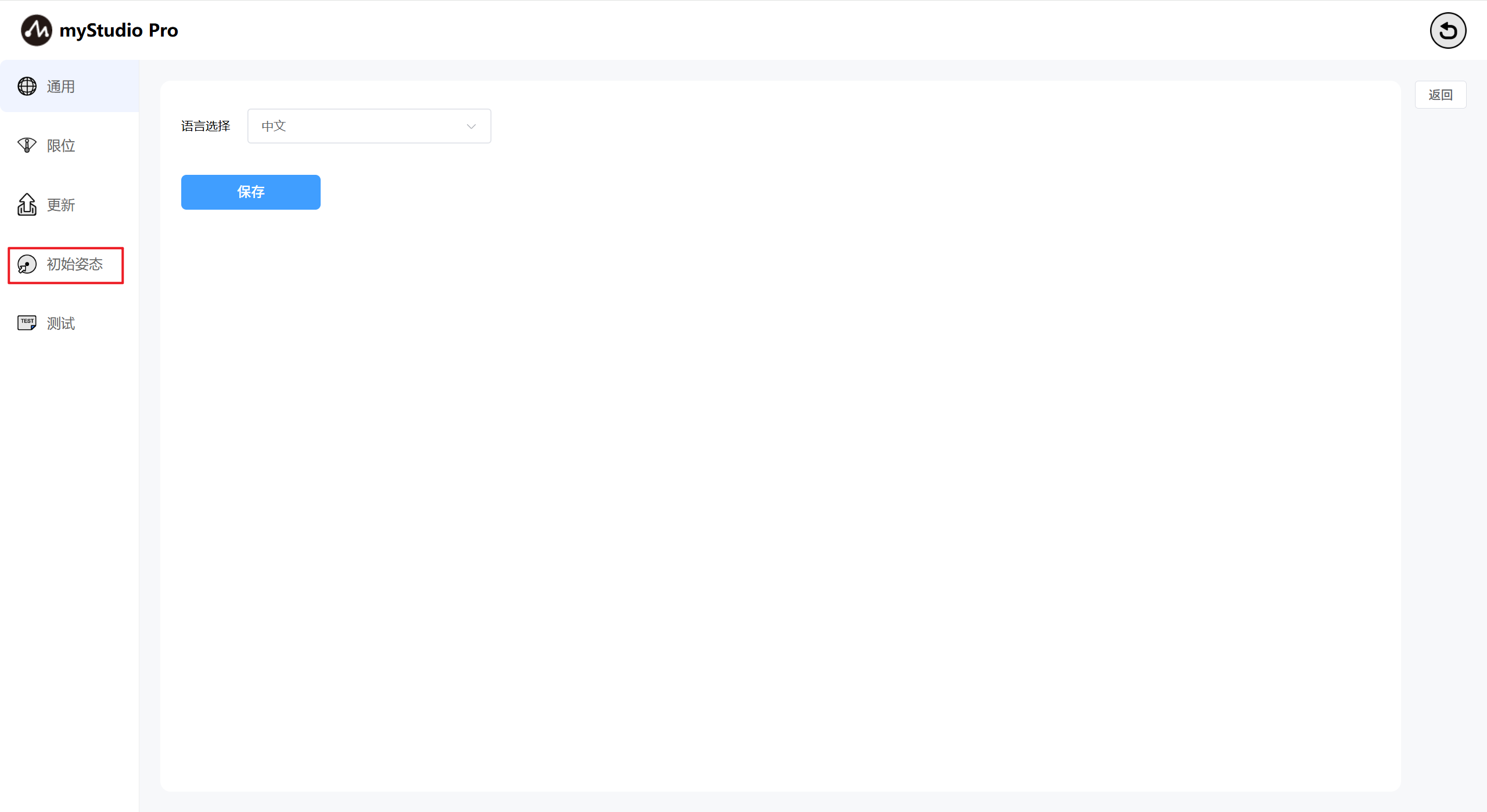
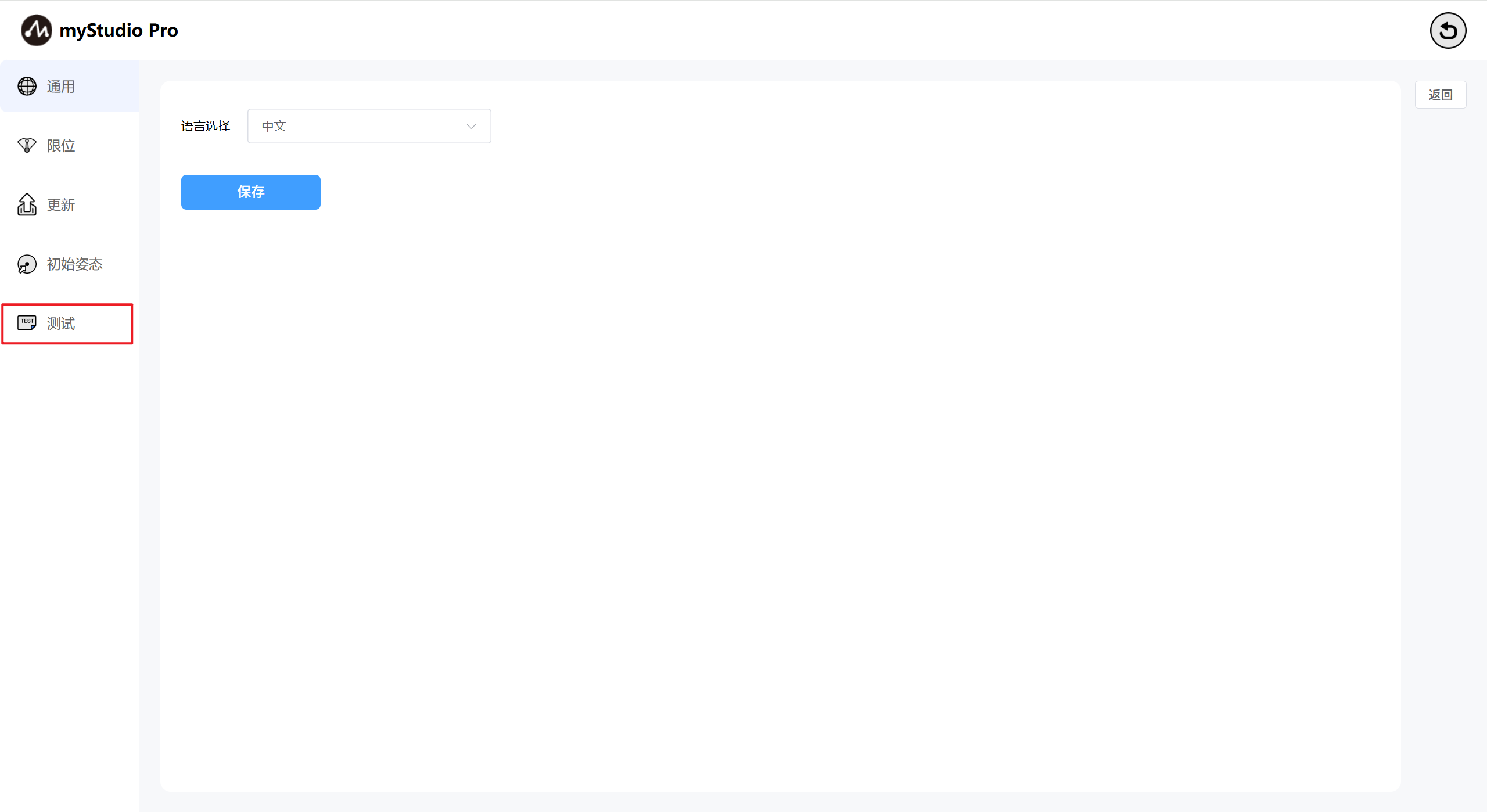
2 通用设置
点击 通用设置 图标按钮,将进入语言设置页面,语言选择支持中文和英文。
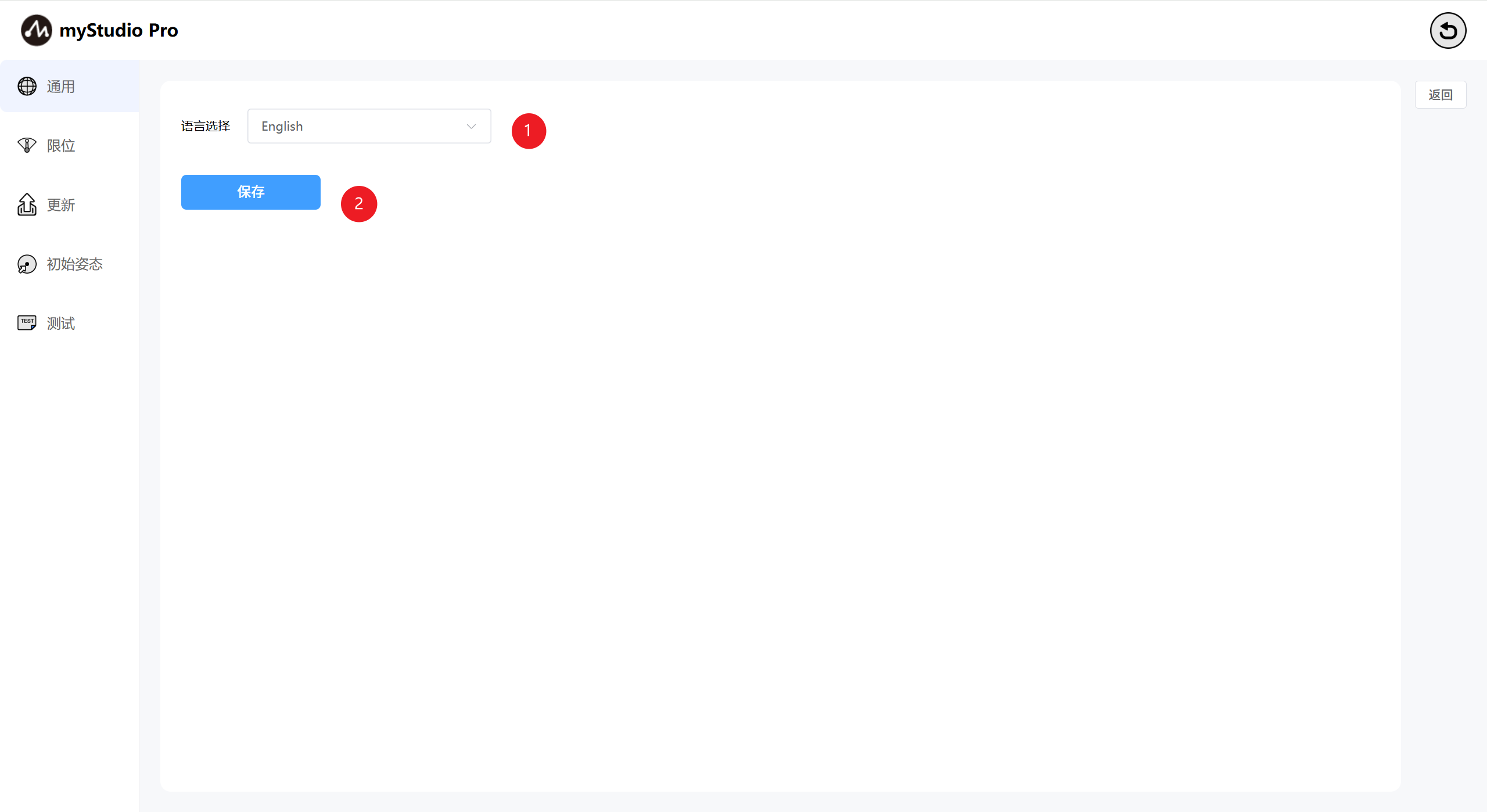
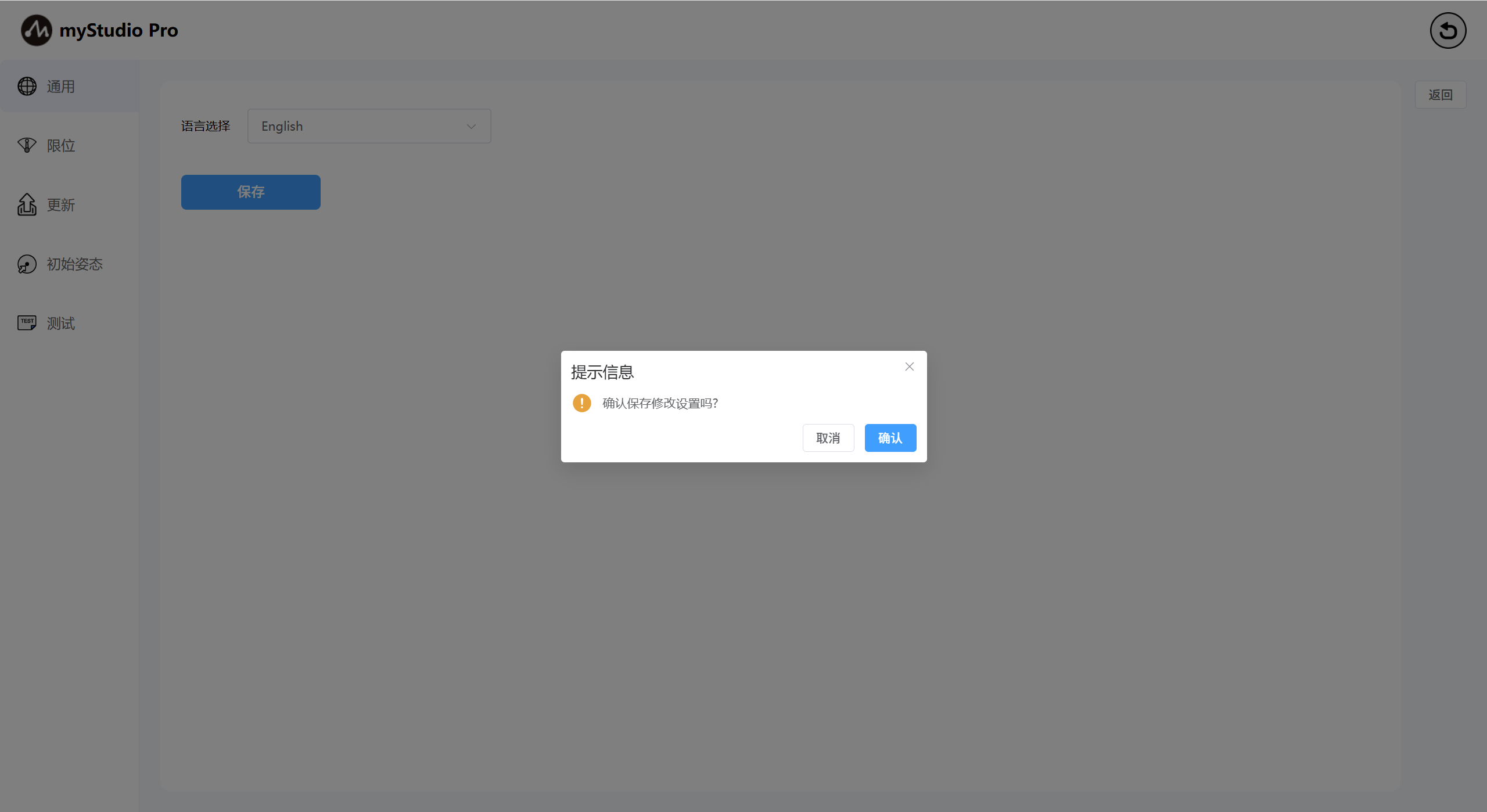
选择对应语言之后,点击 保存 按钮,会出现二次确认提示信息弹窗,点击确认,即可成功设置语言。
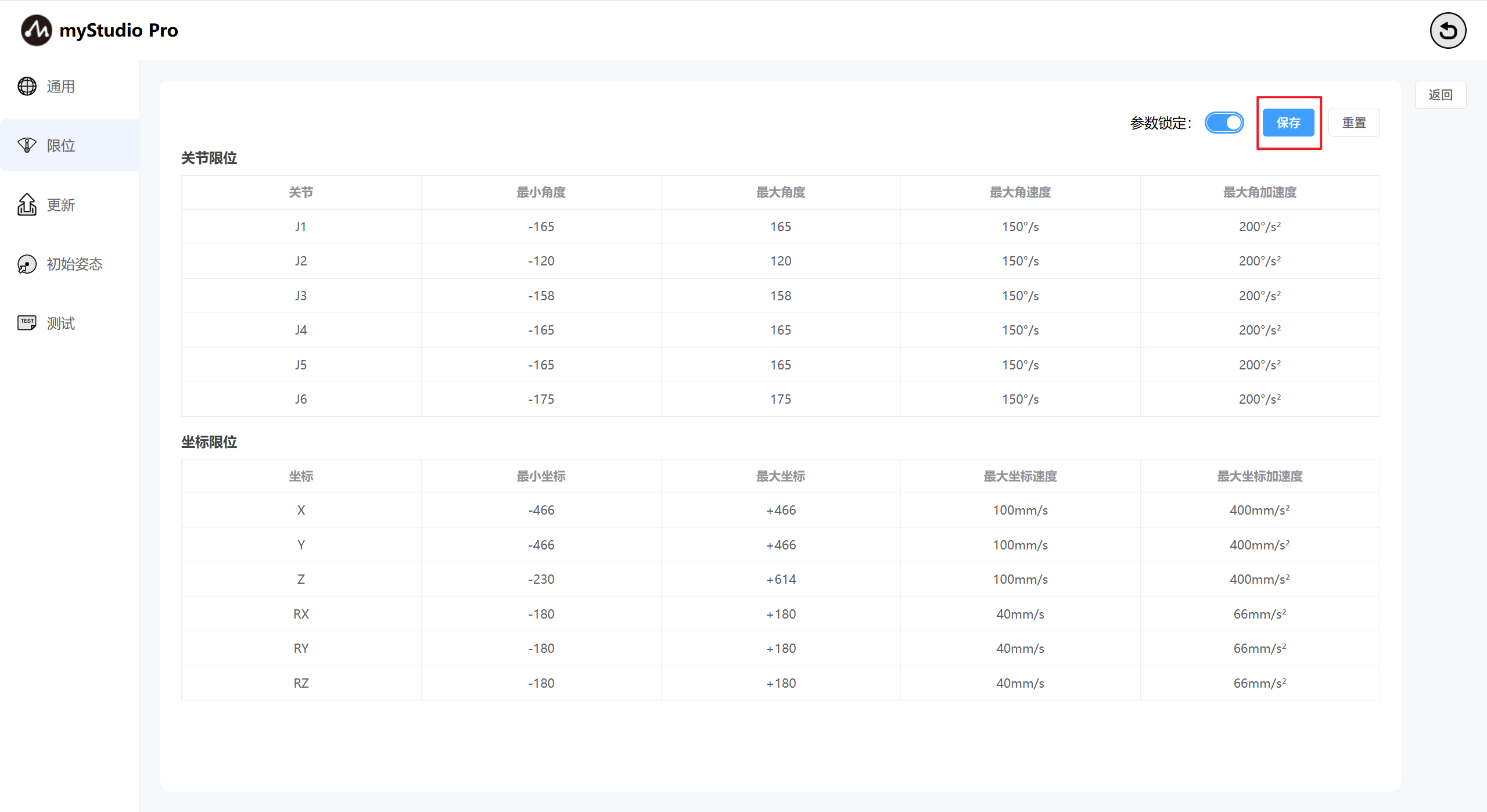
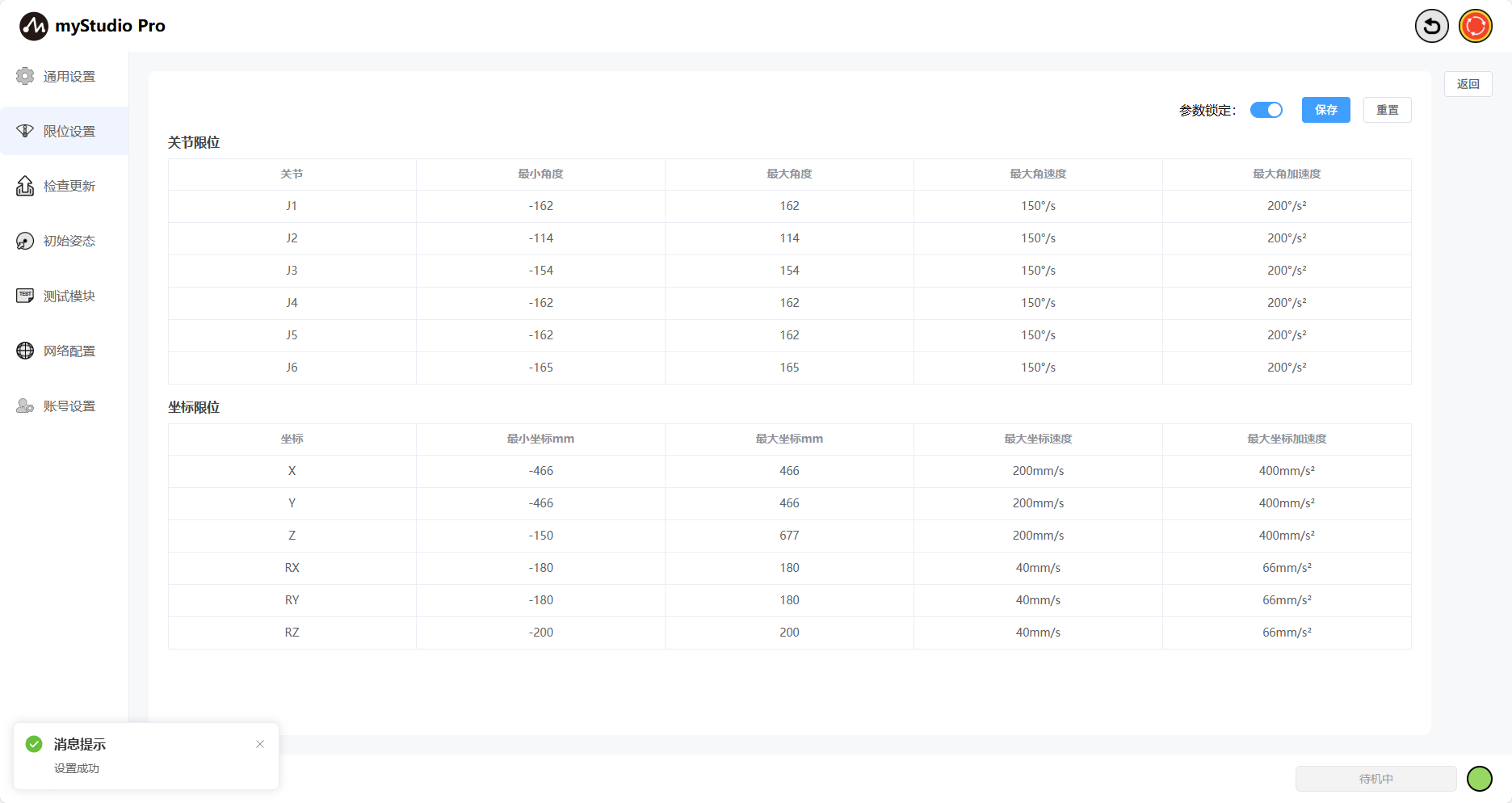
3 限位设置
注意:限位参数修改仅支持关节的最小角度和最大角度,其它参数均不支持修改。
点击 限位设置 图标按钮,将进入关节限位设置页面。限位设置 界面默认显示当前机械臂的关节限位和坐标限位的相关参数。
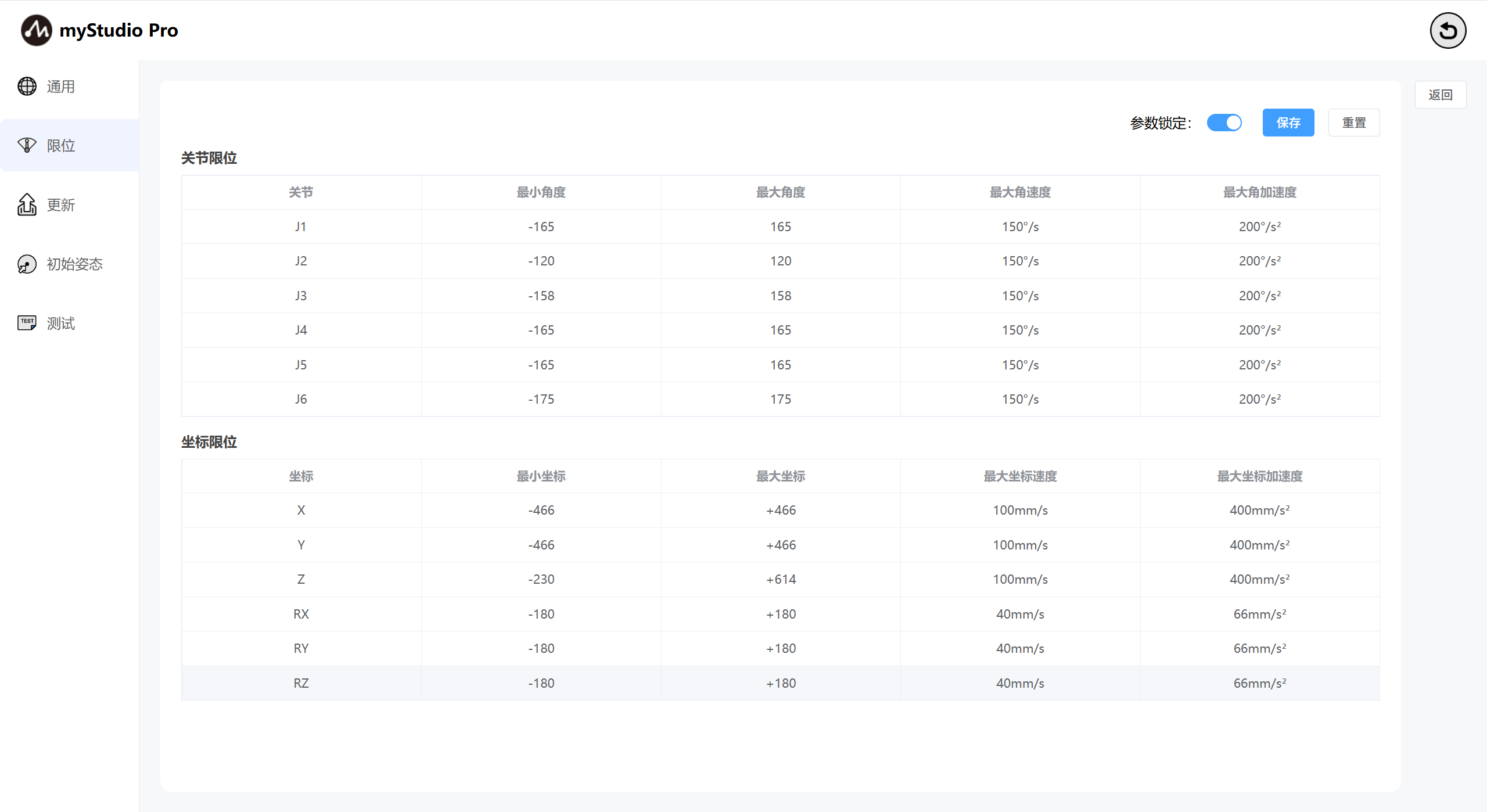
参数锁定 按钮默认处于锁定状态,按钮颜色为蓝色,代表不能修改限位参数。
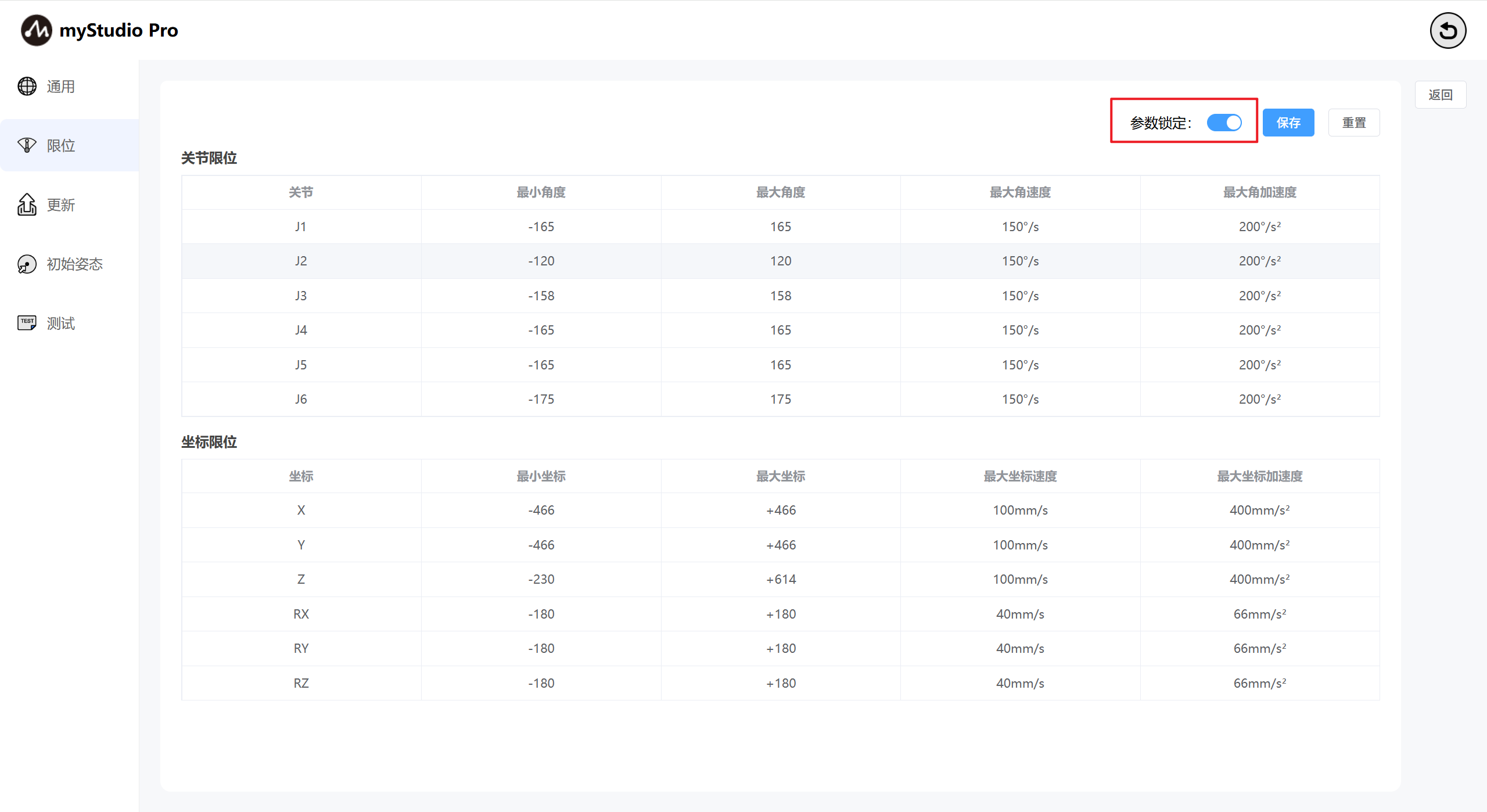
当处于参数锁定状态时,点击 参数锁定 按钮,按钮颜色变成灰色,此时处于开锁状态,代表可以修改限位参数(仅能修改最小角度和最大角度的数值)。
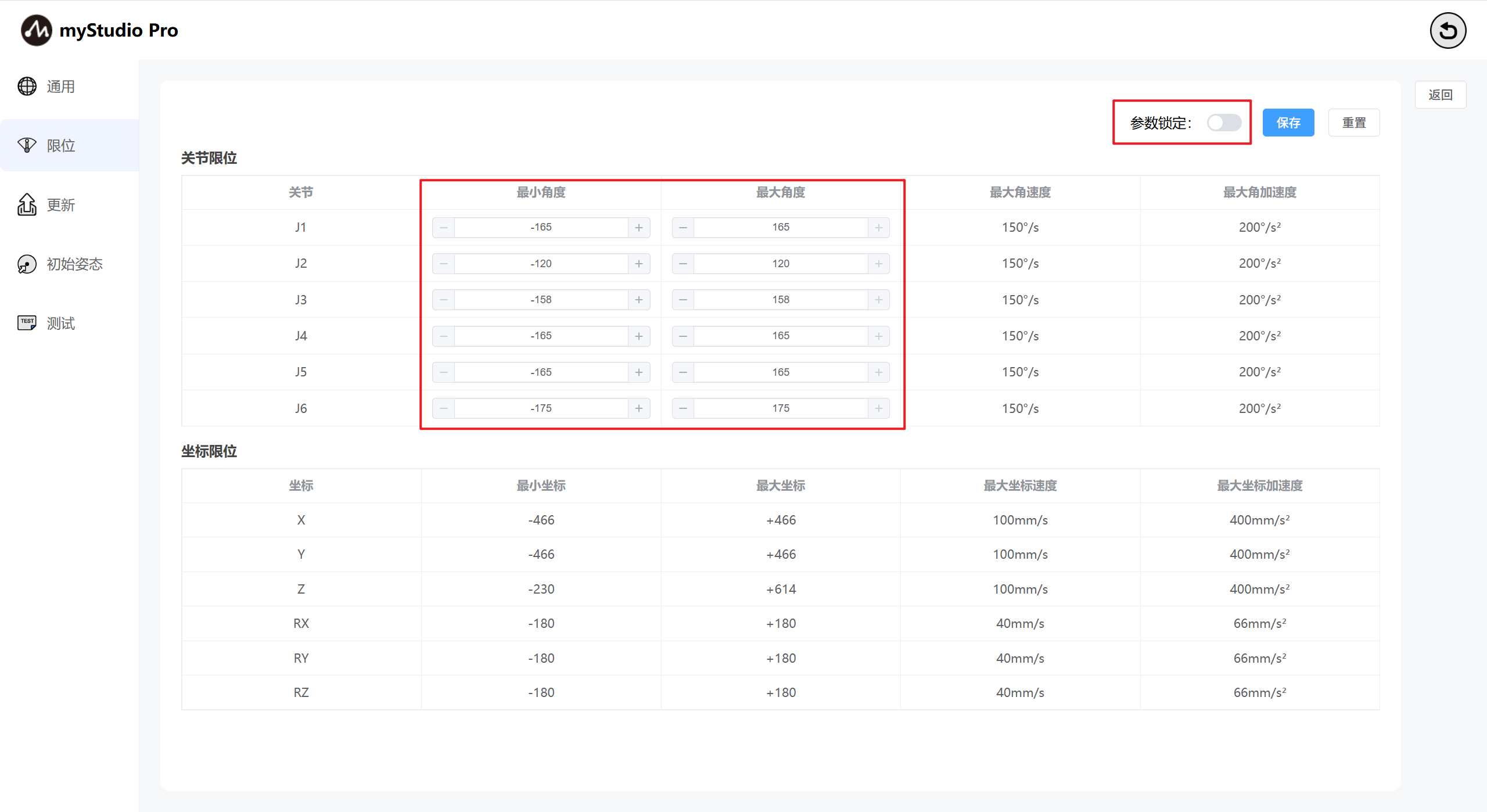
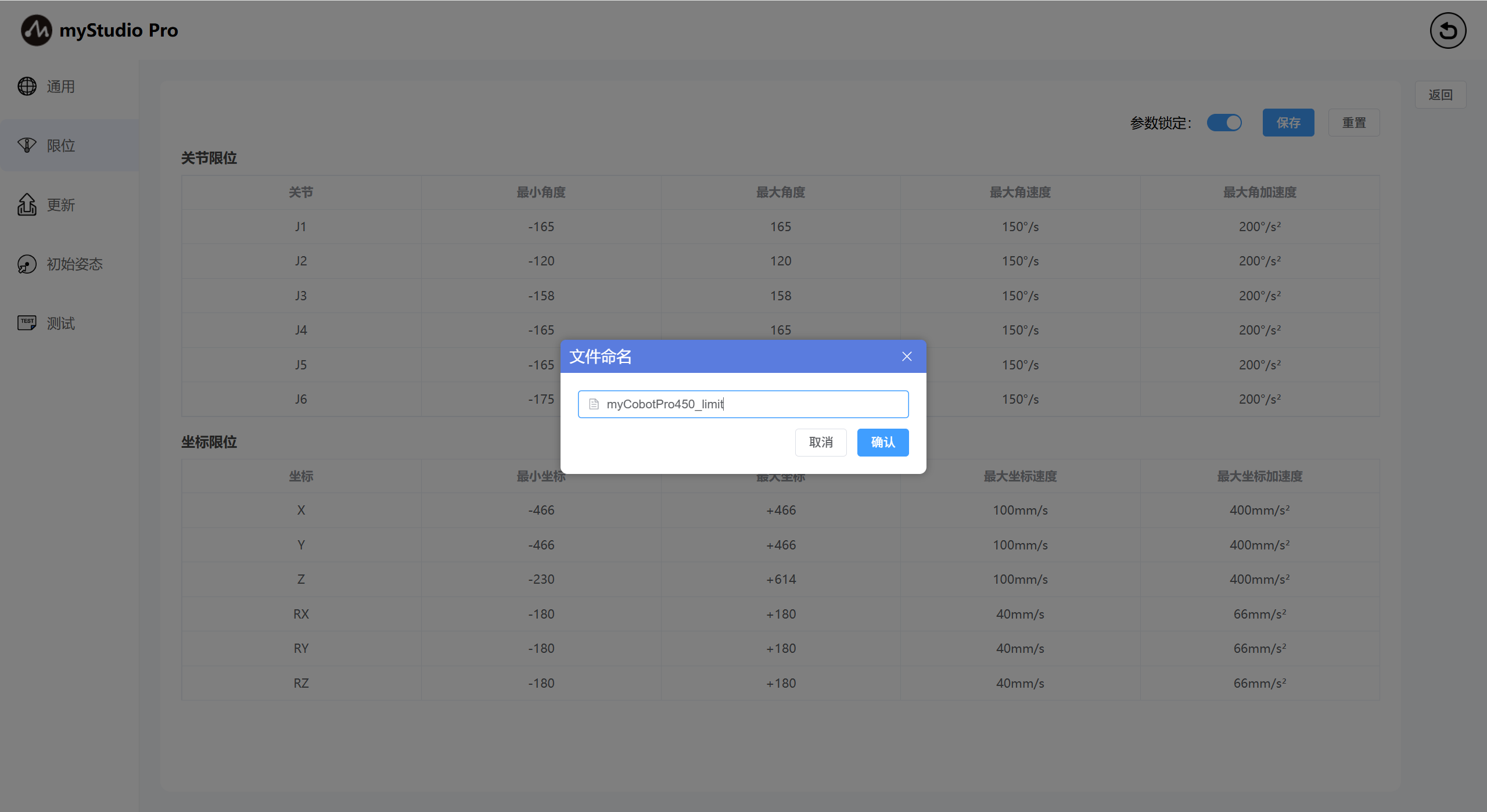
点击 保存 按钮,根据弹窗的提示定义文件名,即可将当前限位页面的参数保存到本地文件(json文件),并且设置机械臂的关节限位,设置成功后页面会有消息提示。
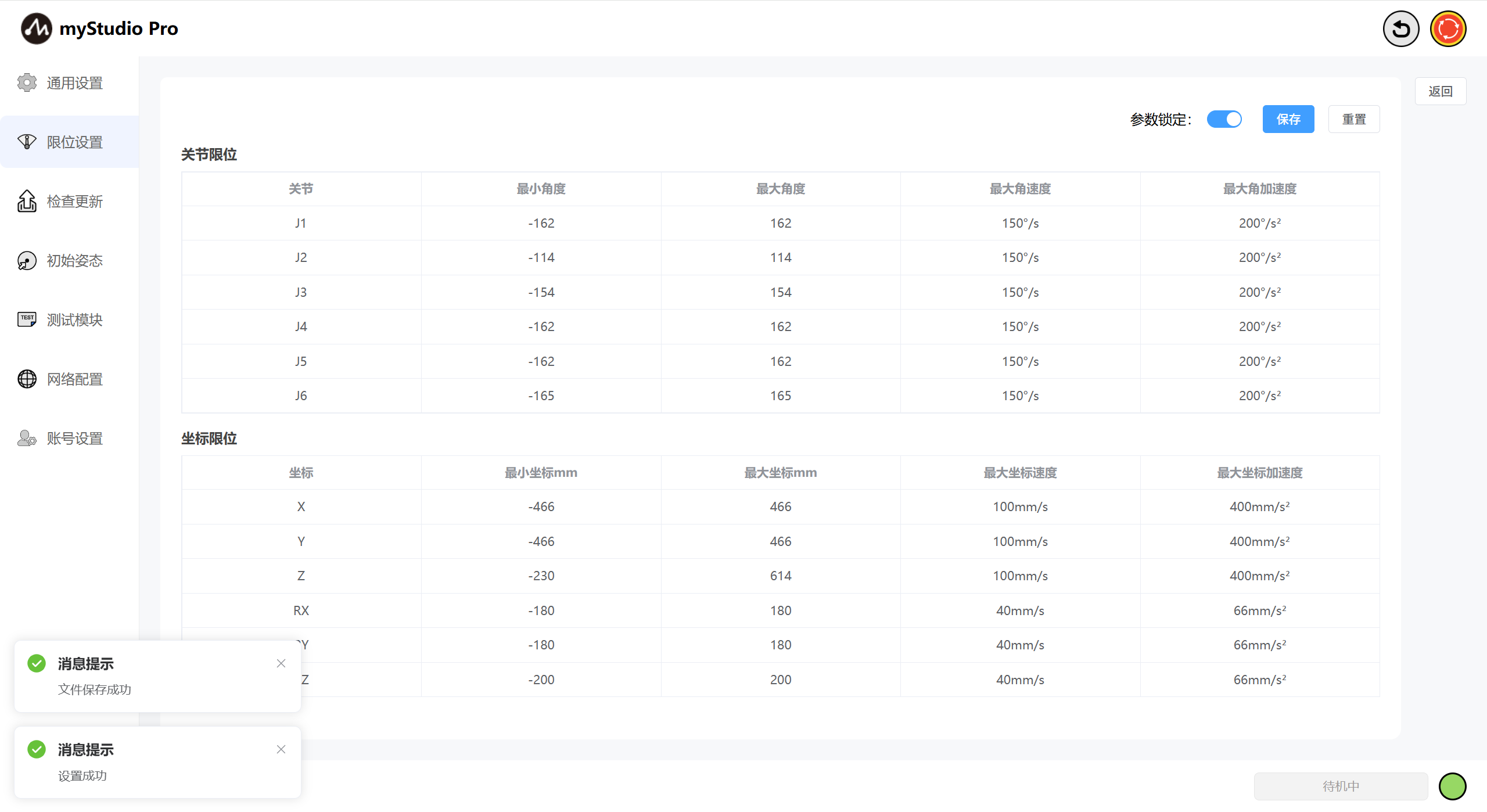
点击重置按钮,将所有关节、坐标限位恢复至默认设置。点击时提示是否恢复默认设置。
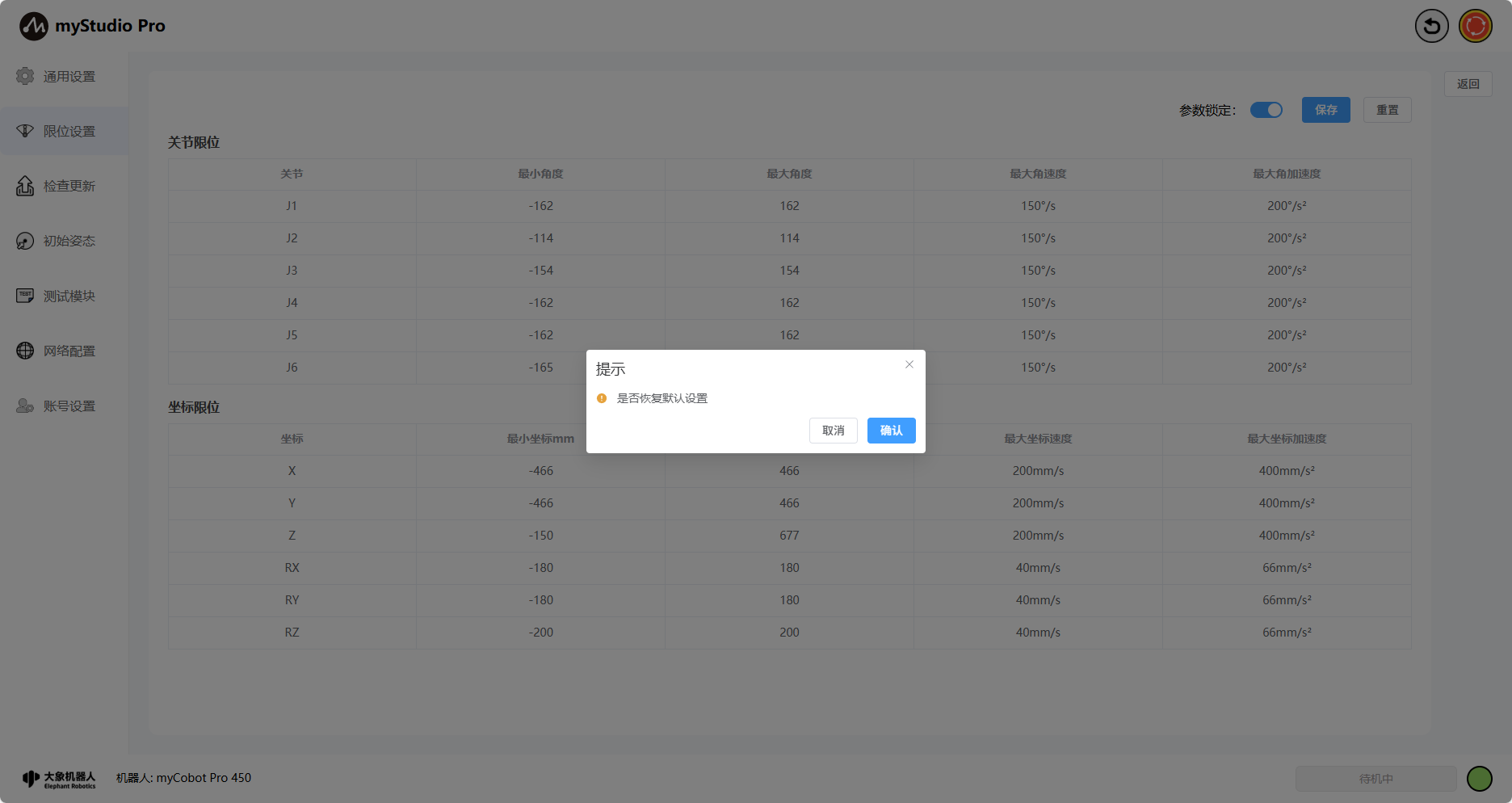
点击确认时,提示设置成功
4 检查更新
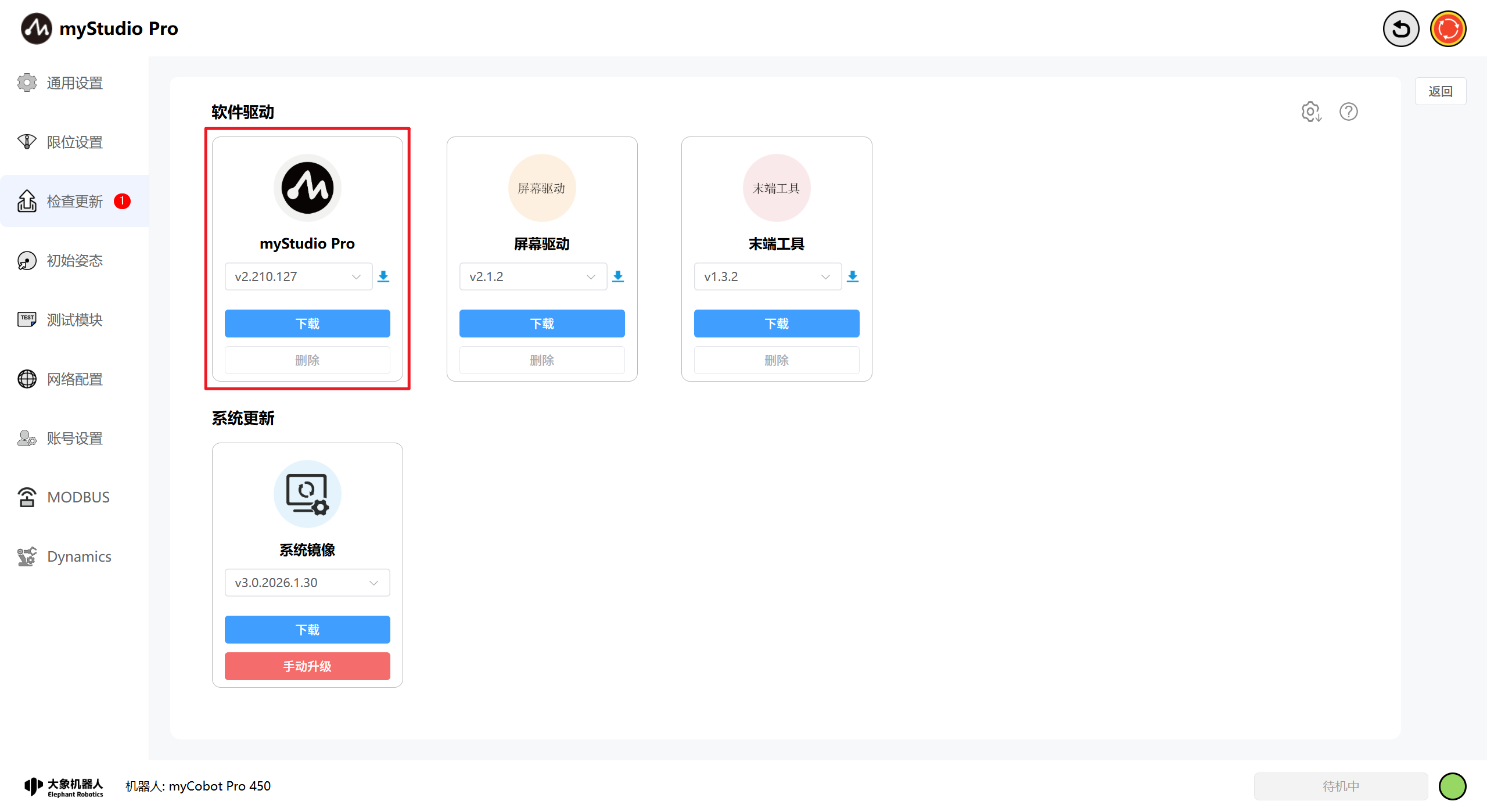
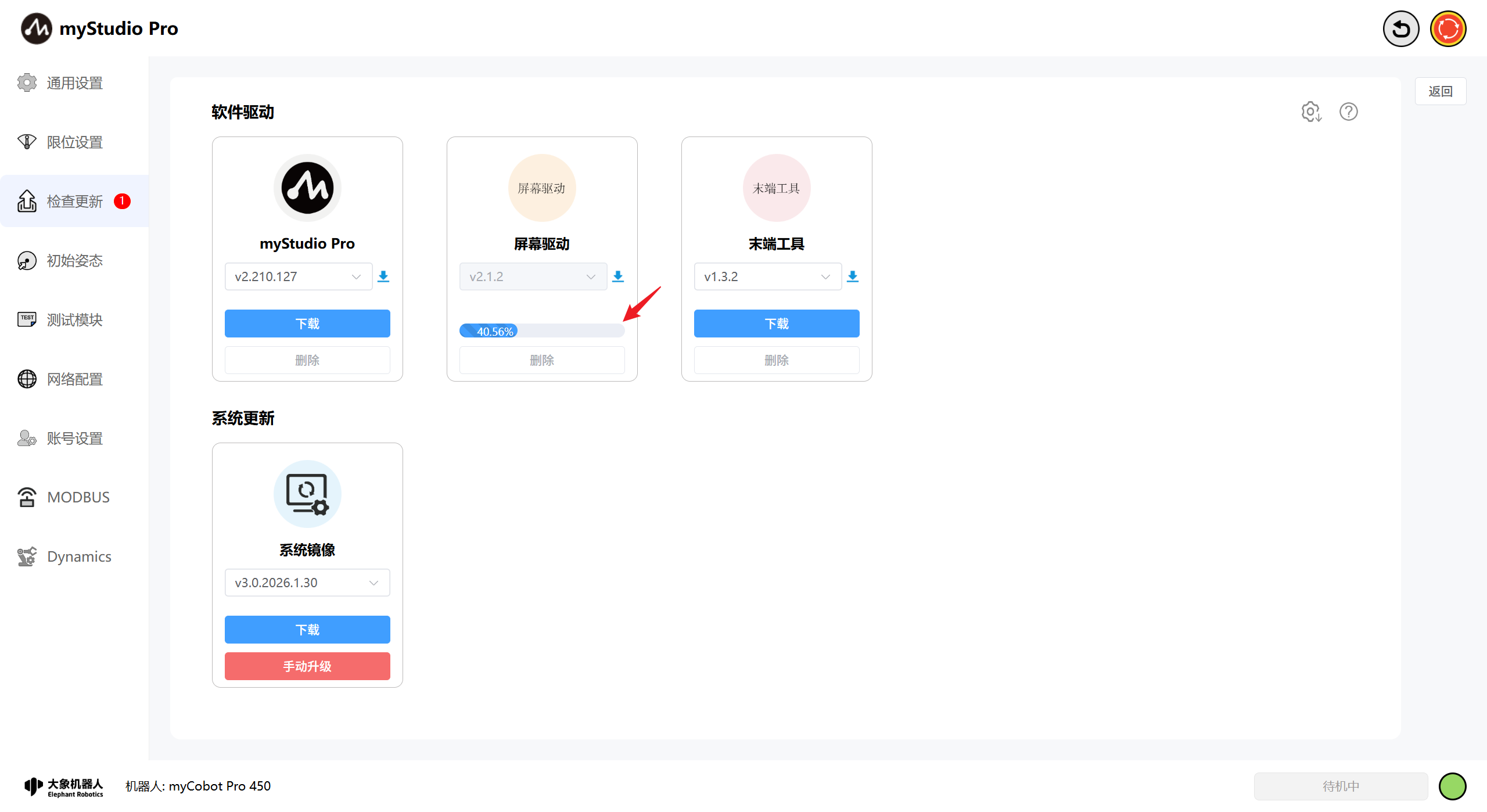
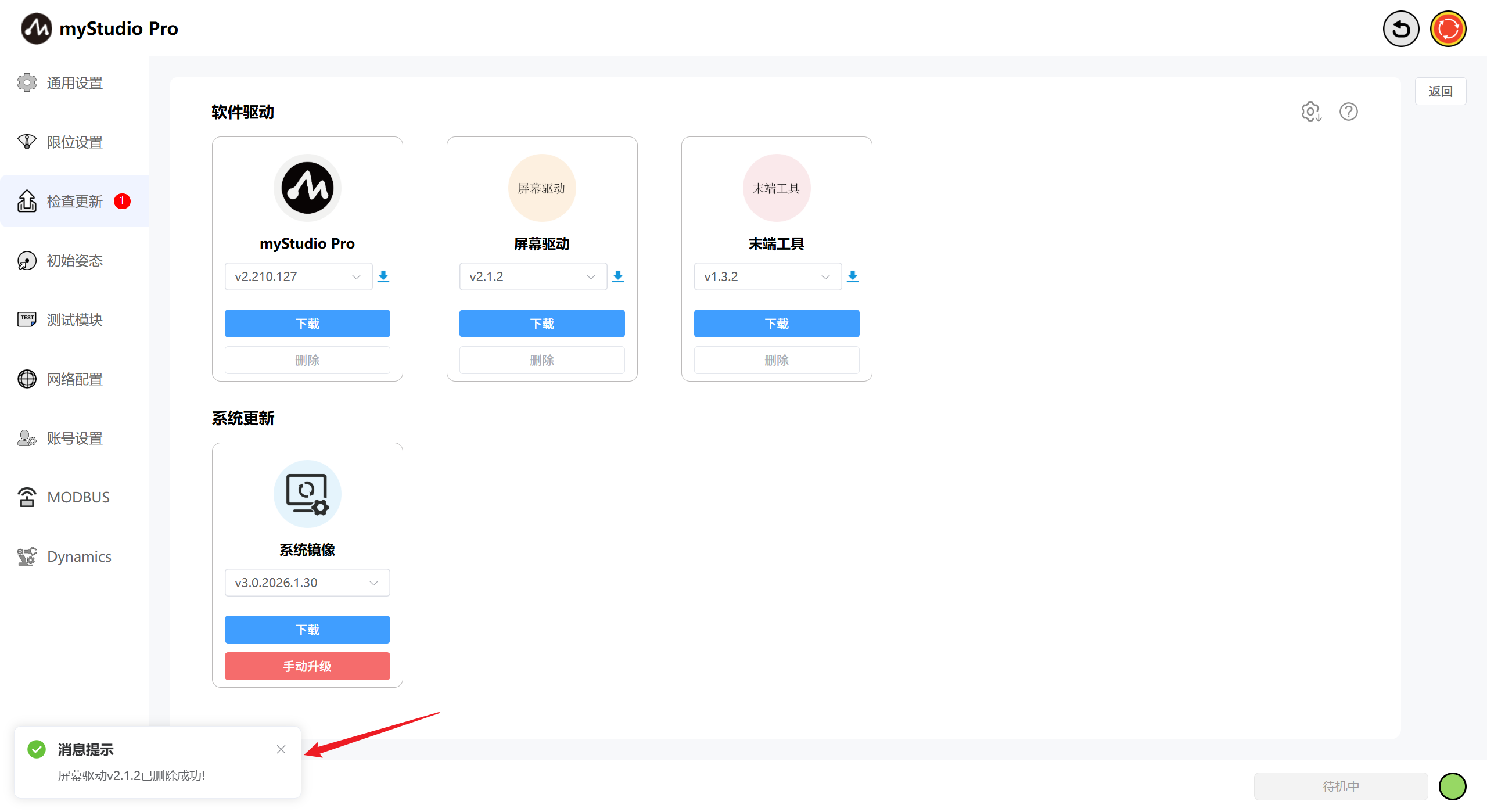
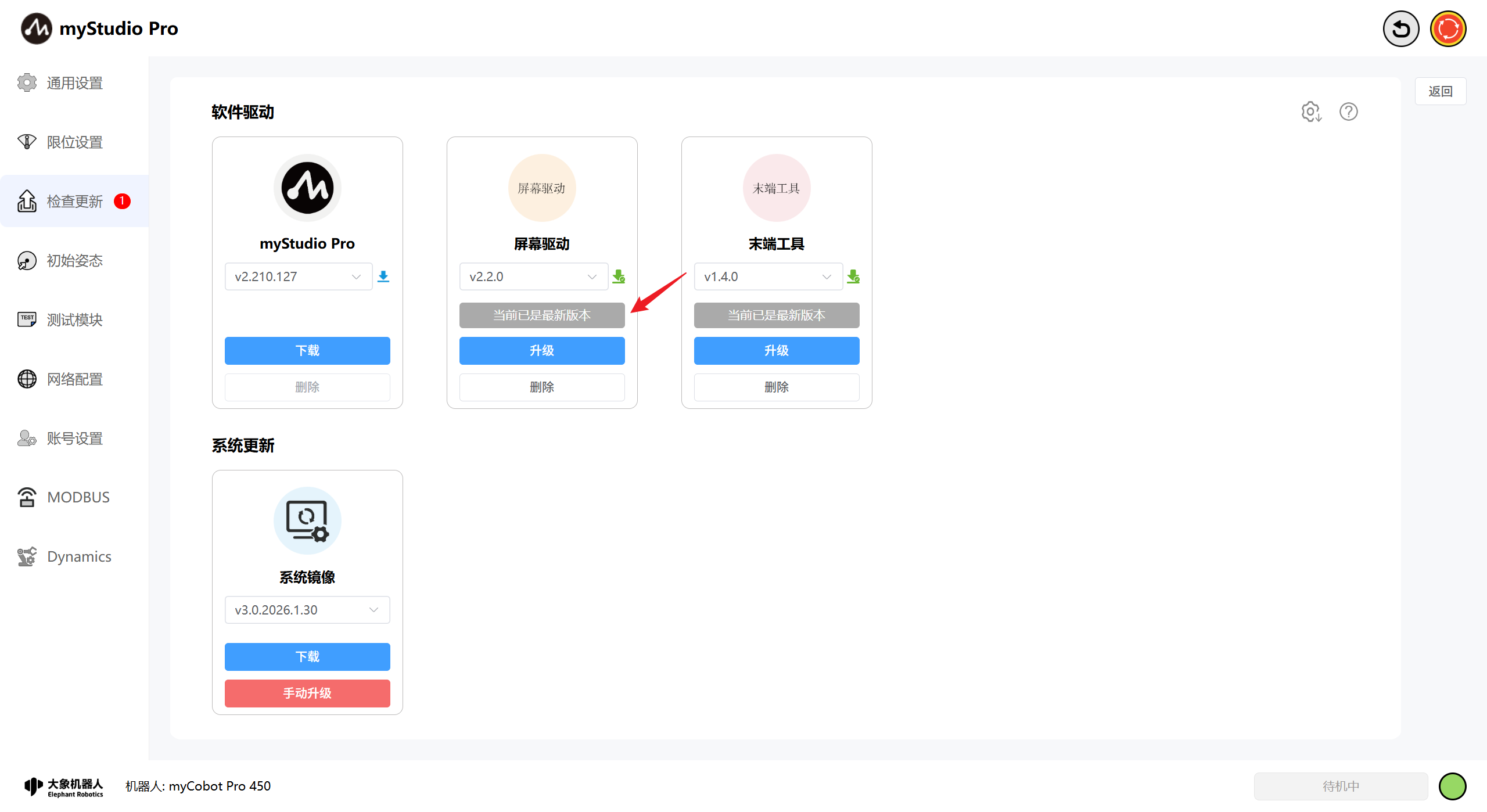
点击 检查更新 图标按钮,将进入检查更新状态页面,该页面可用对软件驱动(myStudio Pro、屏幕驱动、末端工具)进行下载、删除、升级操作,对系统镜像进行下载和手动升级。
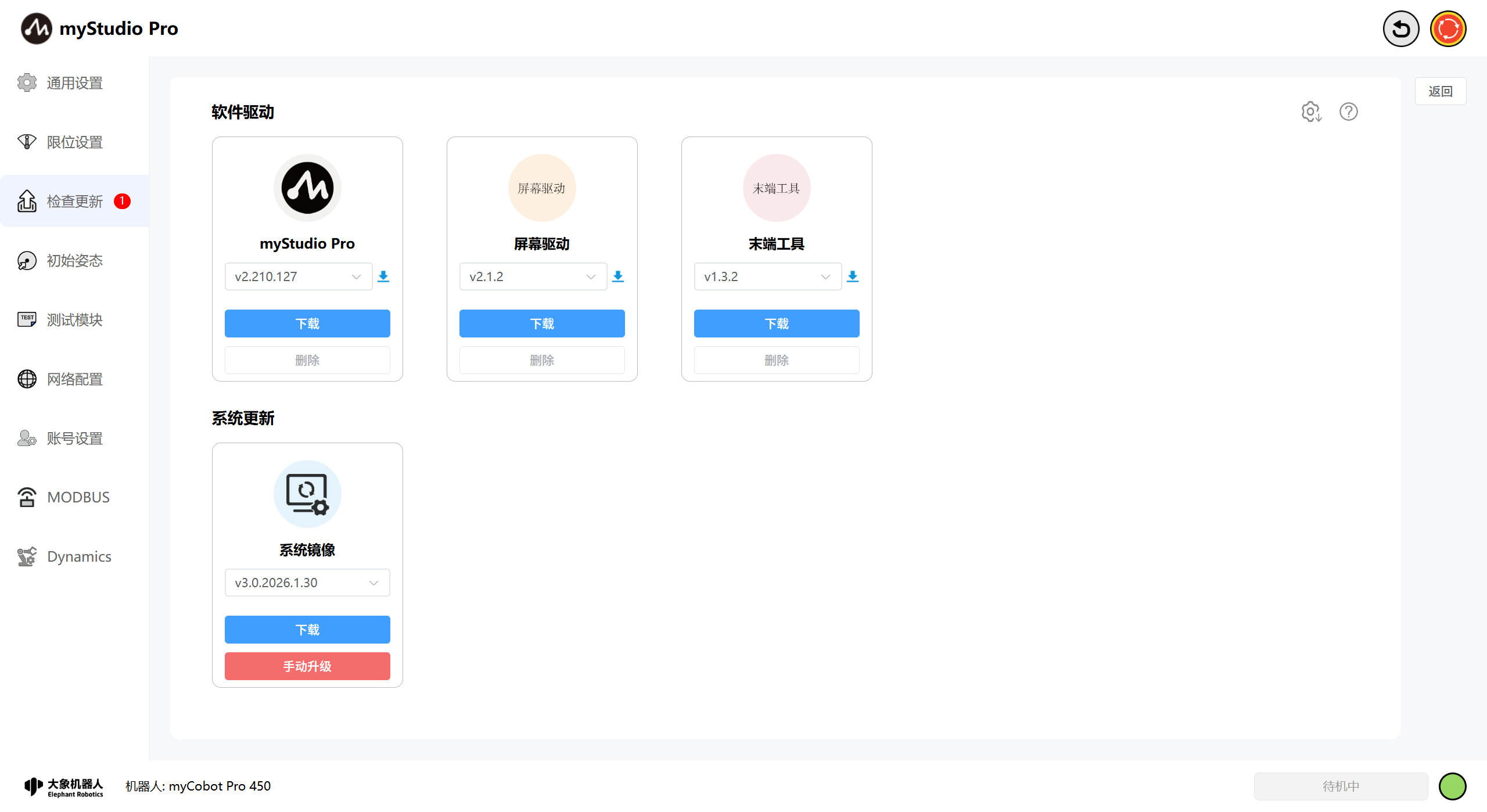
当软件驱动存在最新版本驱动且未进行升级操作时,检查更新图标旁会有数字1显示,此时代表存在新版本,您可进入该页面查看具体的升级内容。
![]()
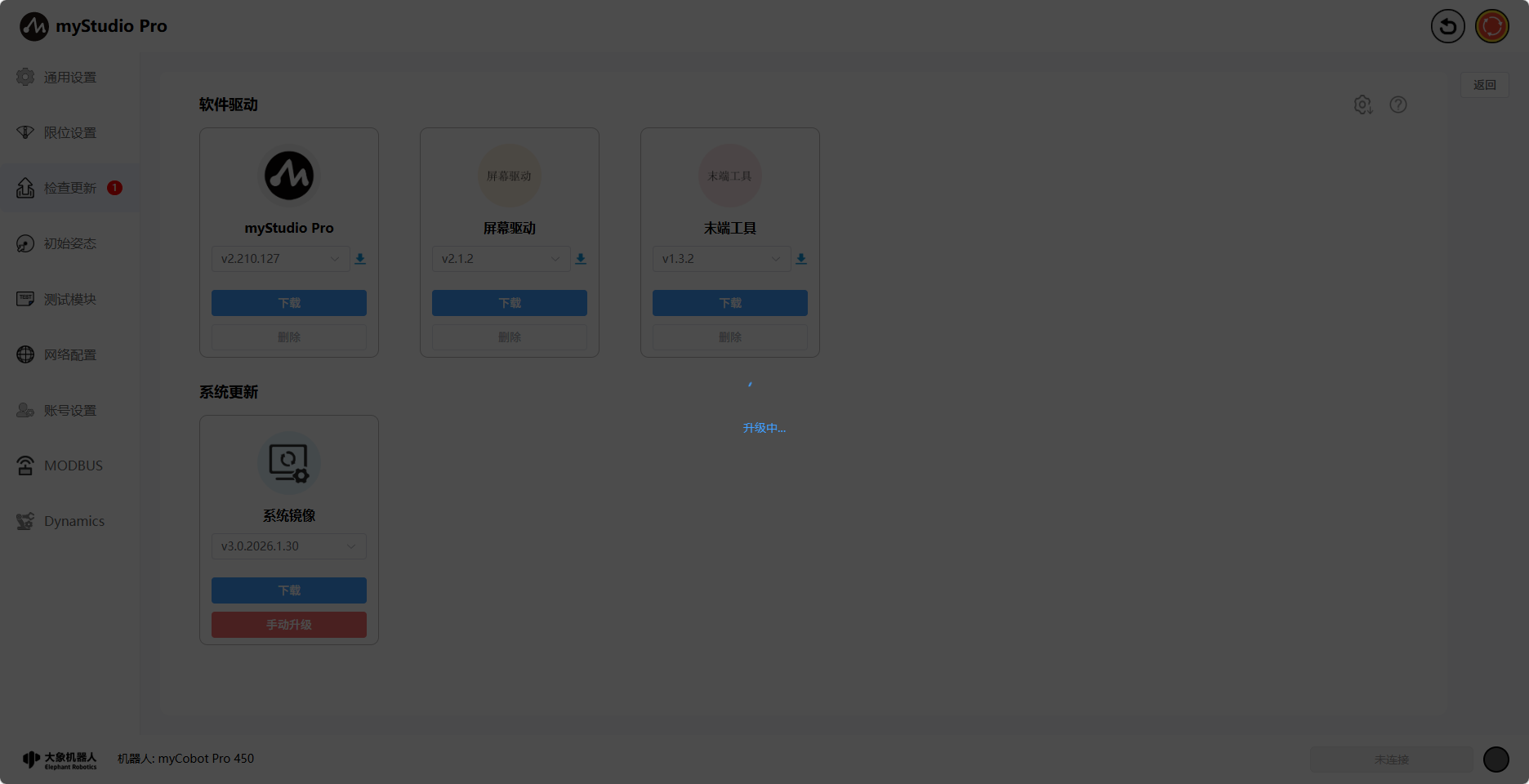
在该页面可以开启软件驱动的自动下载和自动升级功能,顾名思义自动下载会将需要更新的最新软件驱动版本后台静默下载,当且仅当本次所有需升级的软件驱动下载完成后就会进行自动升级流程。
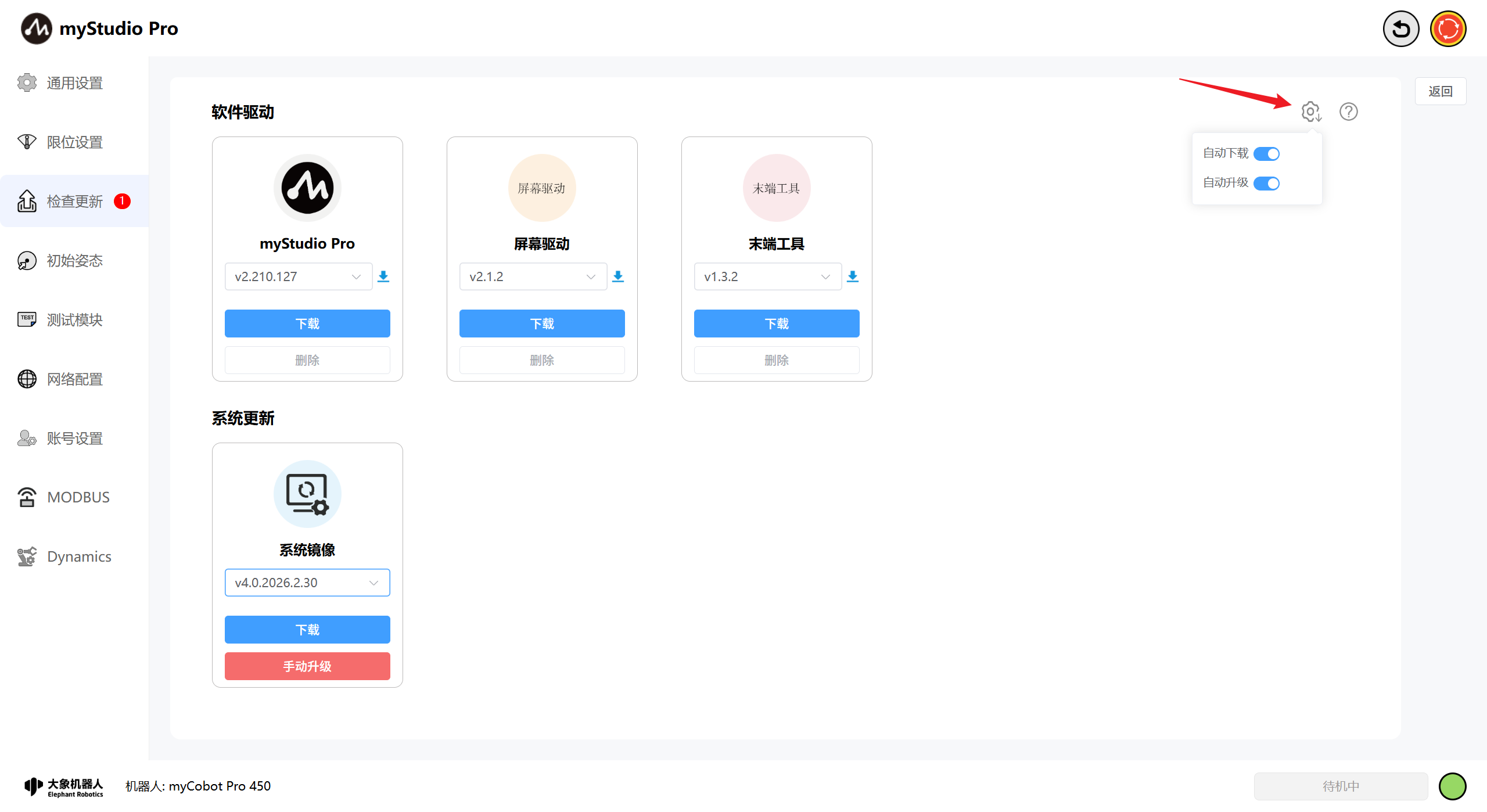
存在自动升级的软件驱动时,进入主页面会弹出升级信息弹窗,通过弹窗可查看本次自动升级包含的内容。
注:当前使用中弹窗只出现一次,不做升级处理时下次使用还会弹出
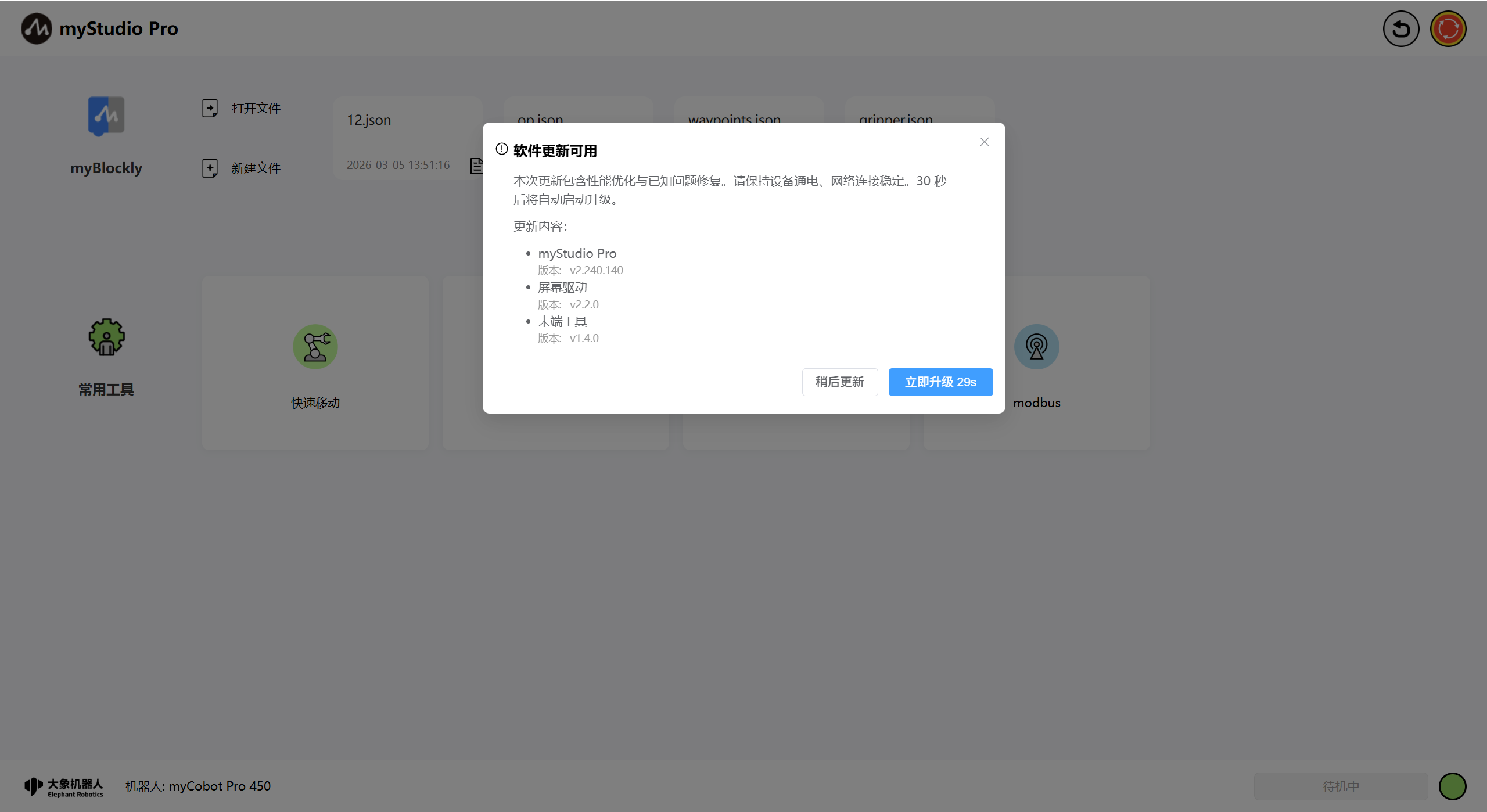
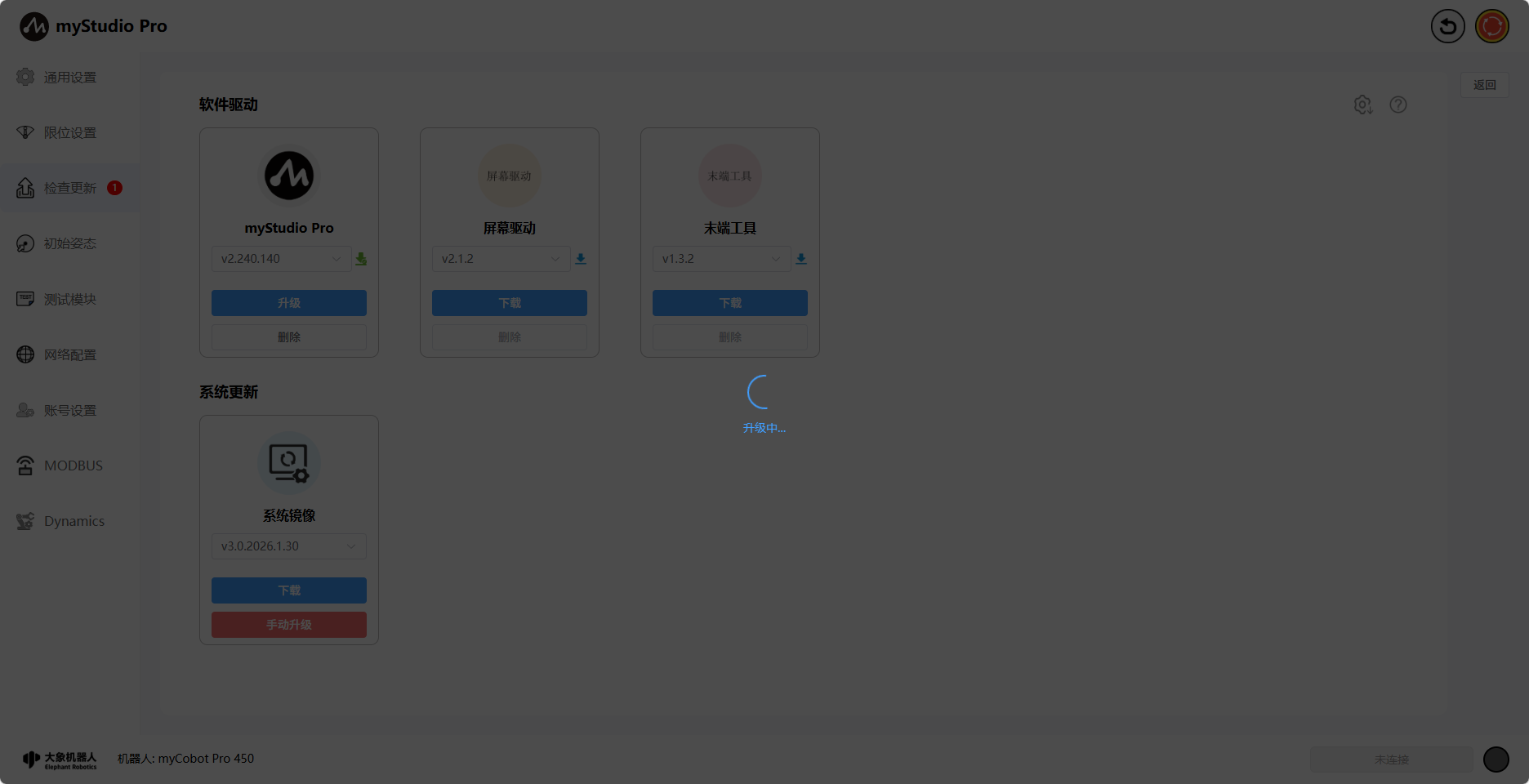
若30s不关闭弹窗和点击立即升级按钮则自动进行升级操作,反之则不进行自动升级。升级过程中会展示升级loading,直至本次升级内容全部升级完成loading消失。
自动升级过程中当单个软件驱动升级完成时会有对应的消息提示,直到最后一个驱动升级完成,loading就会消失。
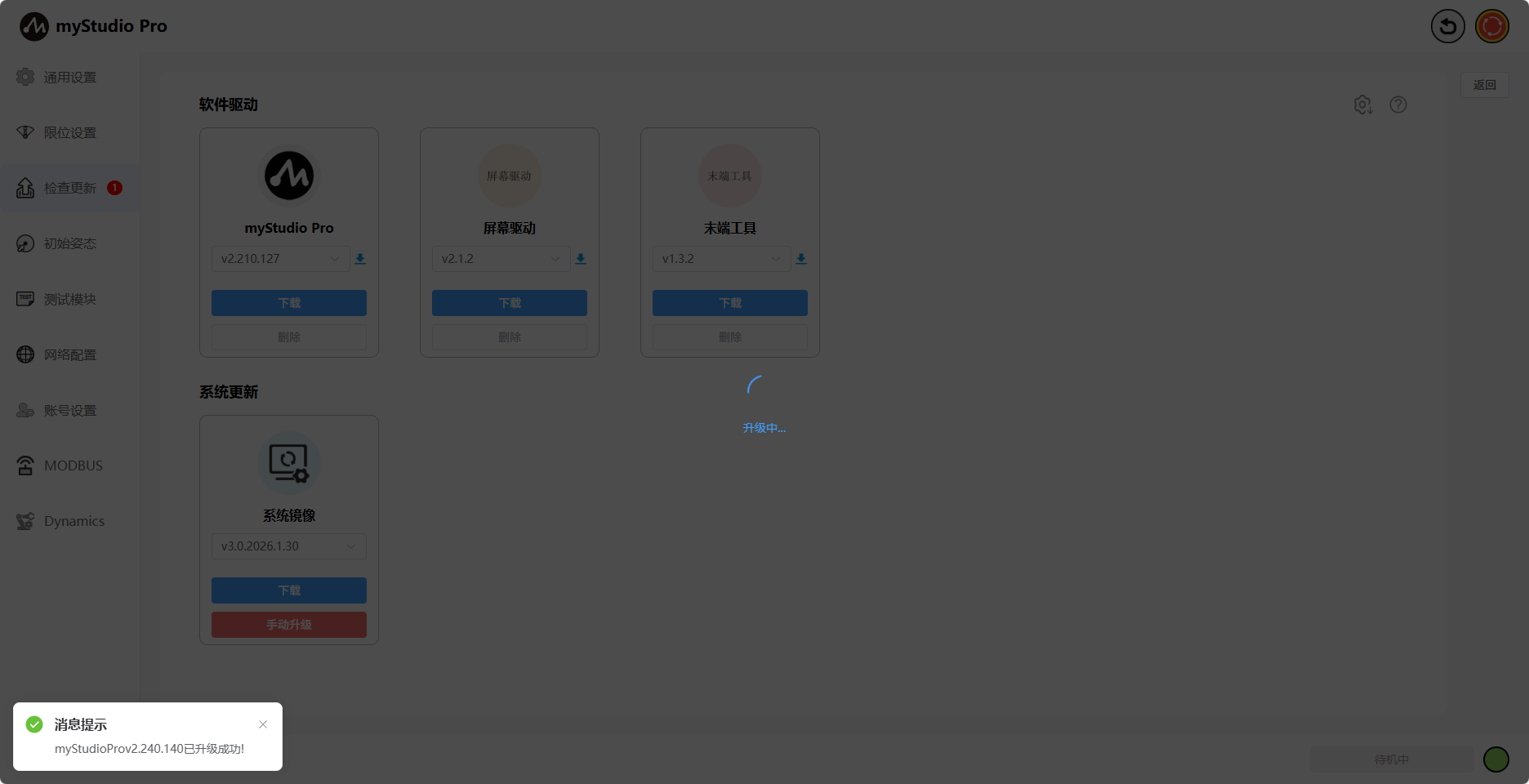
此时已完成自动升级流程操作。
myStudio Pro升级
功能介绍:
myStudio Pro
版本号
默认是机当前的版本,也可以选择其他的版本进行下载升级,当选择的版本为下载状态时版本旁的icon显示为蓝色,删除按钮禁用。
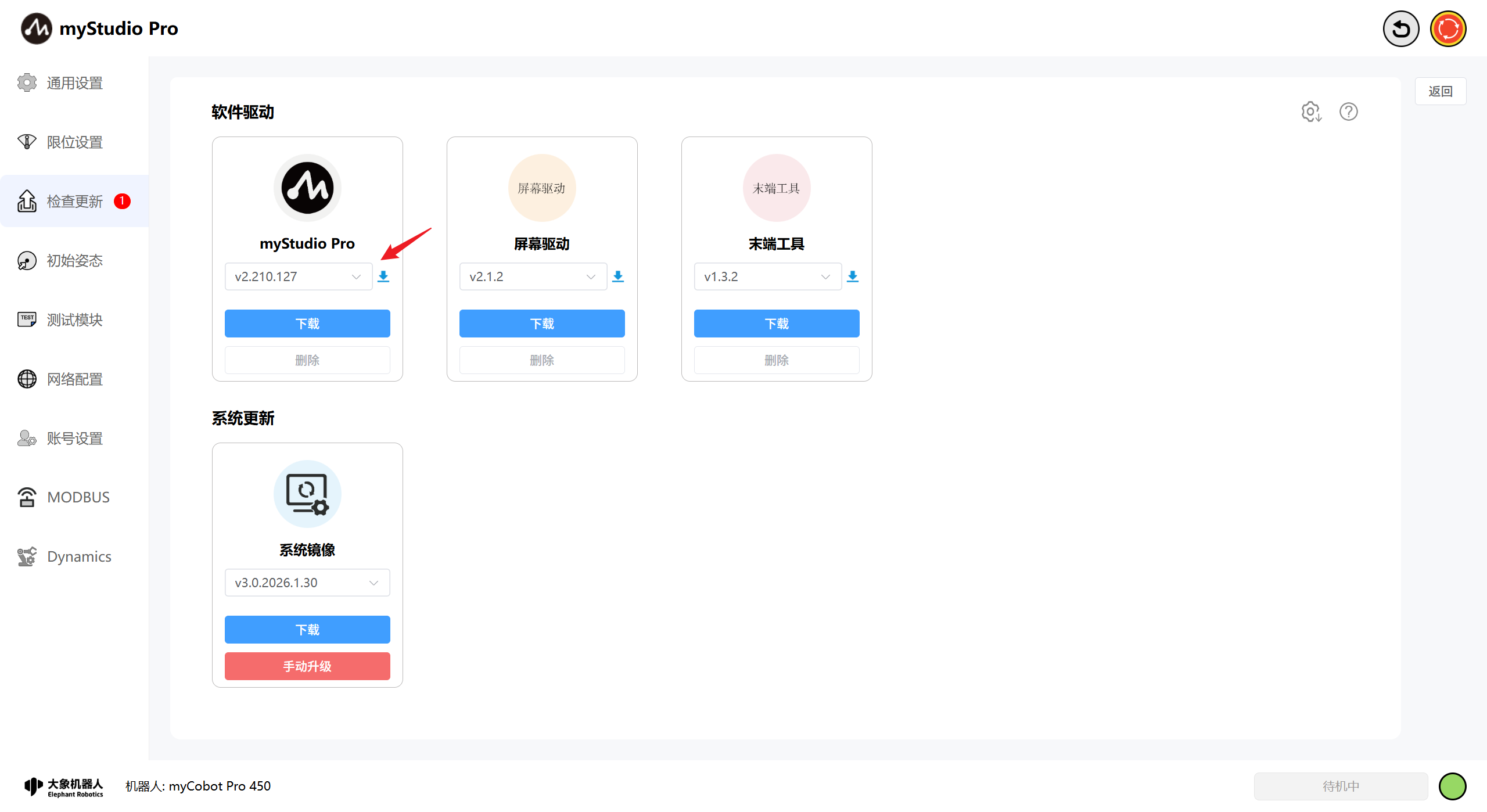
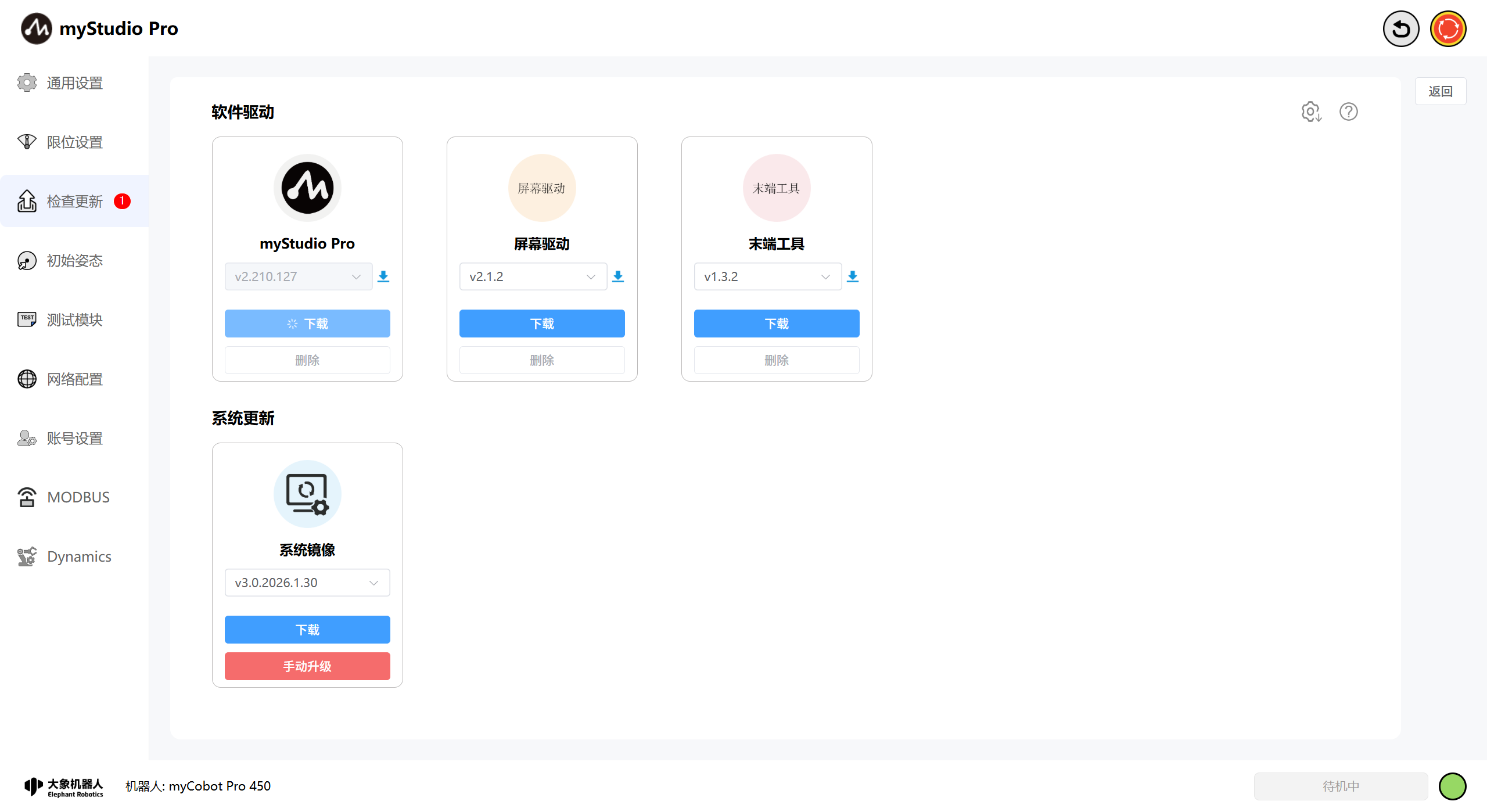
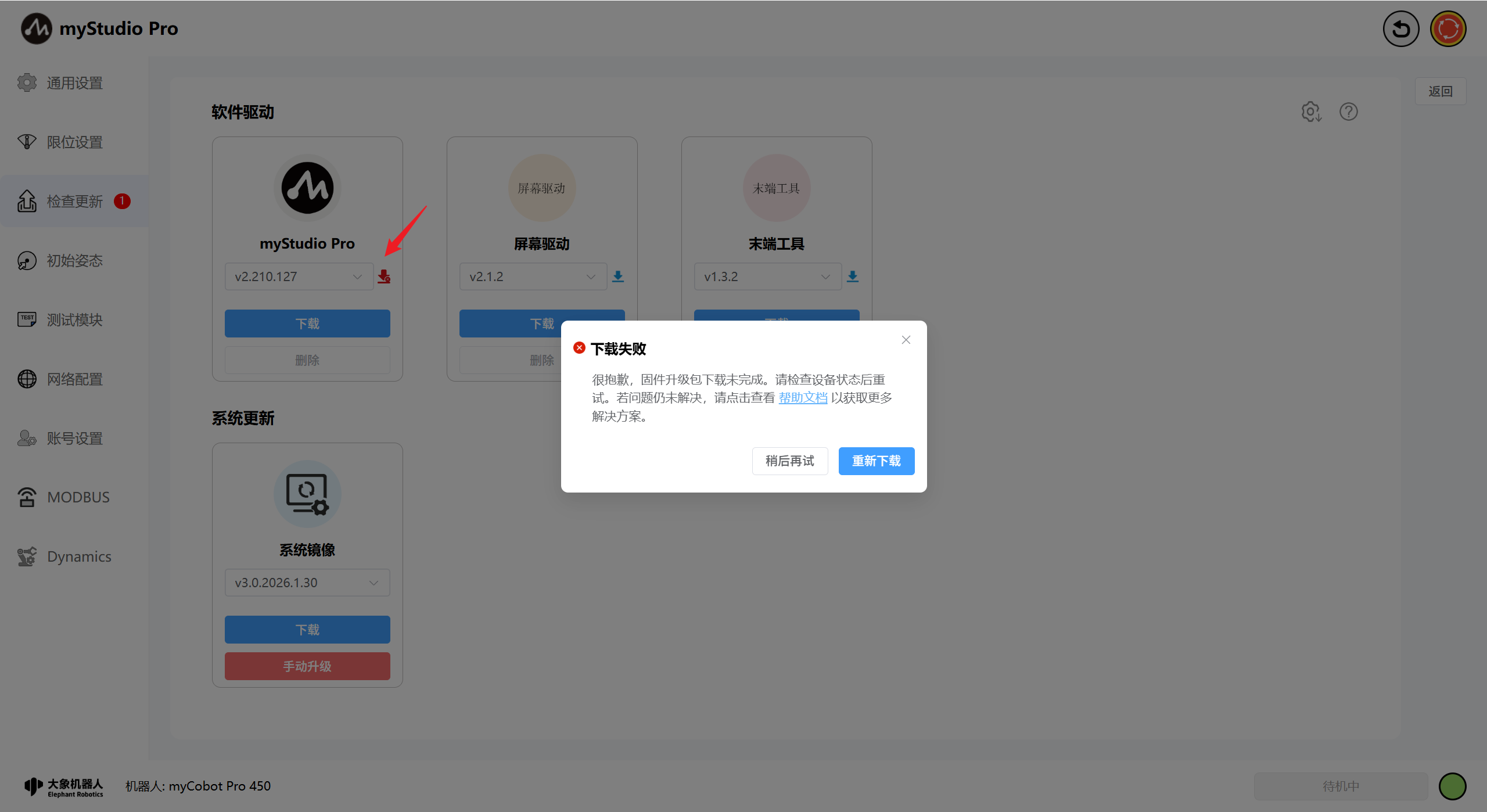
点击下载按钮会对选择版本进行下载操作,此时版本下拉选择框和按钮禁用,下载开始时会展示具体的下载进度。
下载失败时会显示失败弹窗同时icon变为红色,点击重新下载按钮会对上一次所有下载失败的驱动进行重新下载。
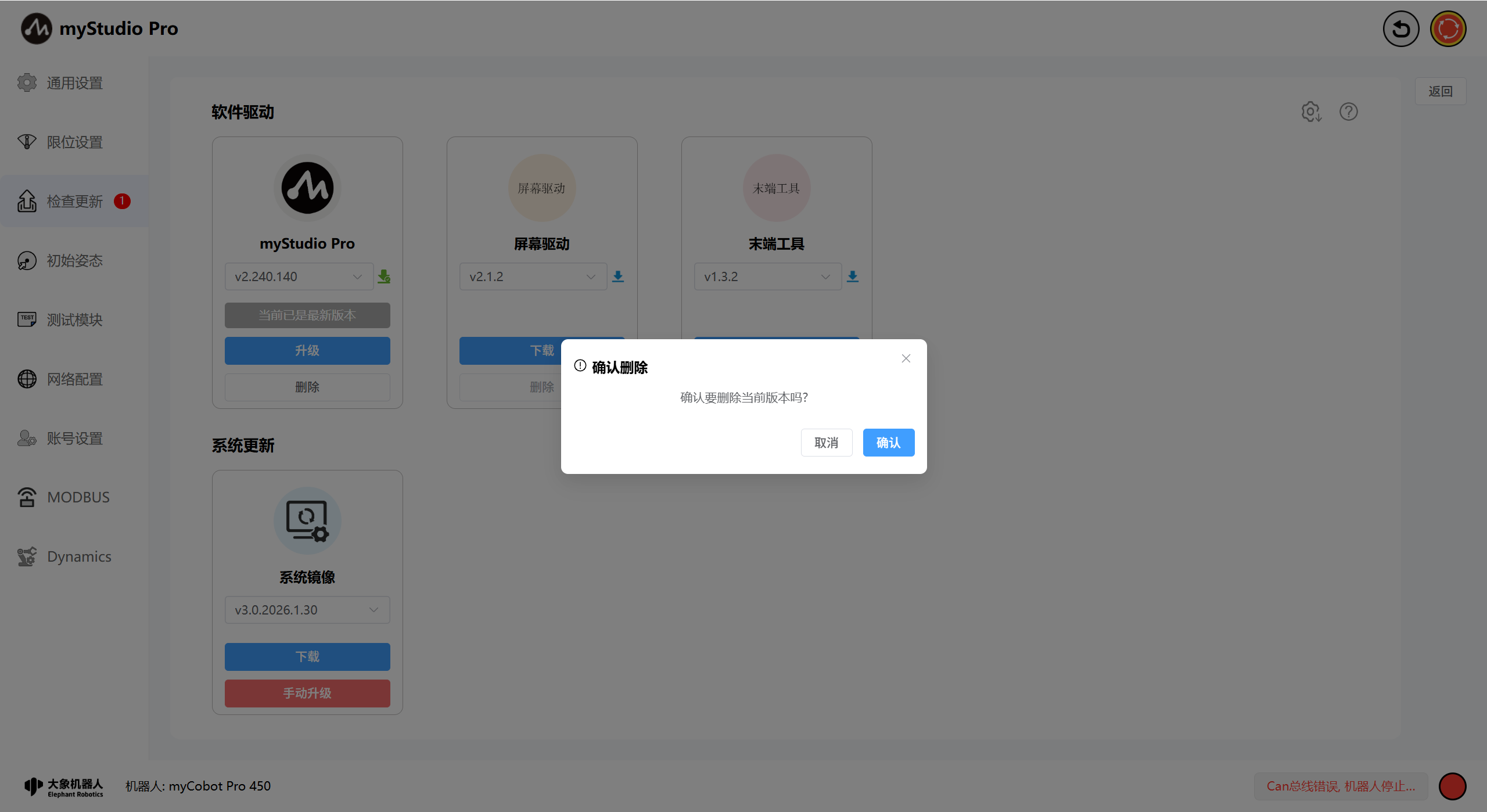
点击删除按钮时,会弹窗确认删除窗,点击确认按钮后会将已下载好的驱动删除。
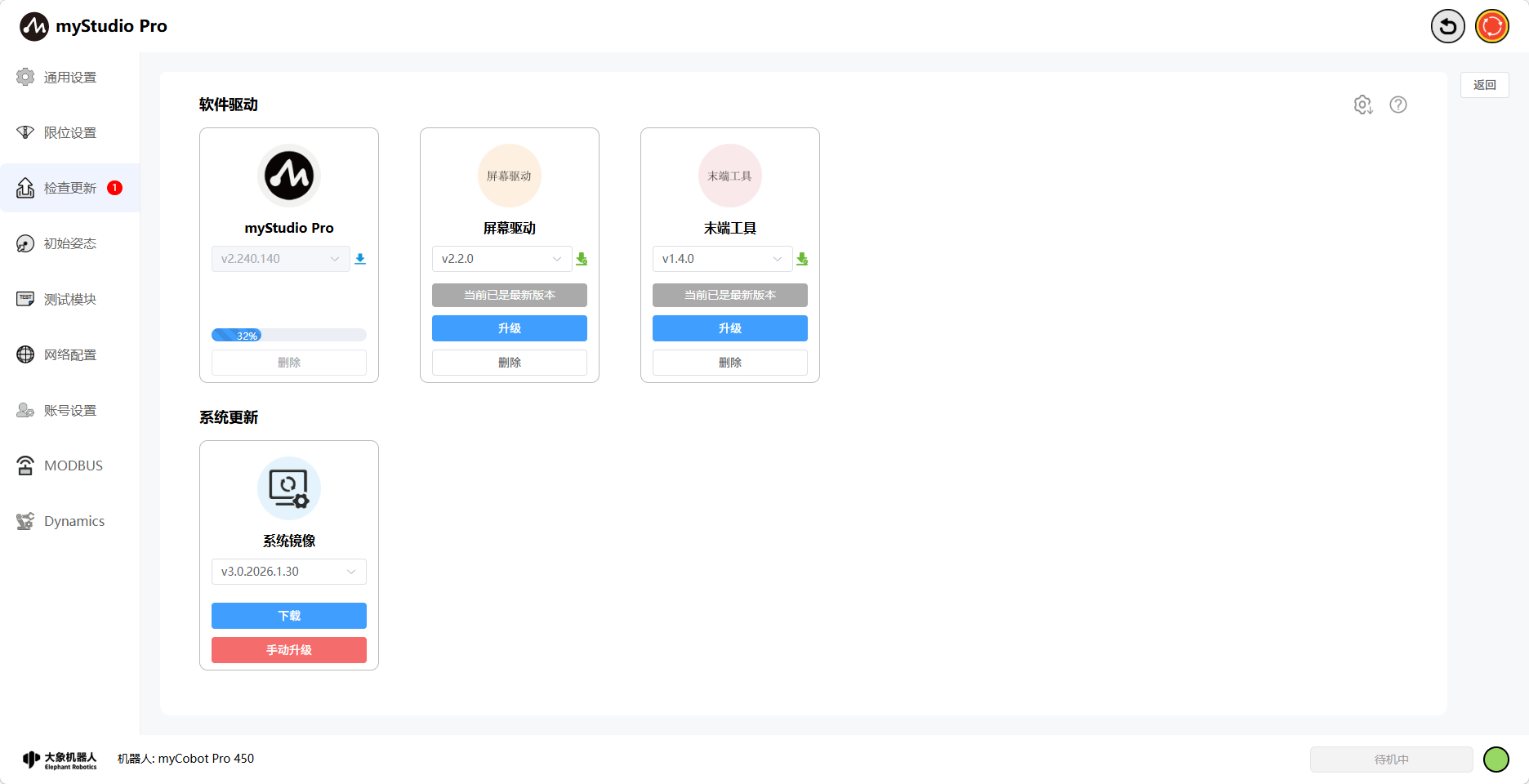
点击升级按钮,会弹出该版本的更新内容、机械臂当前版本和最新版本。
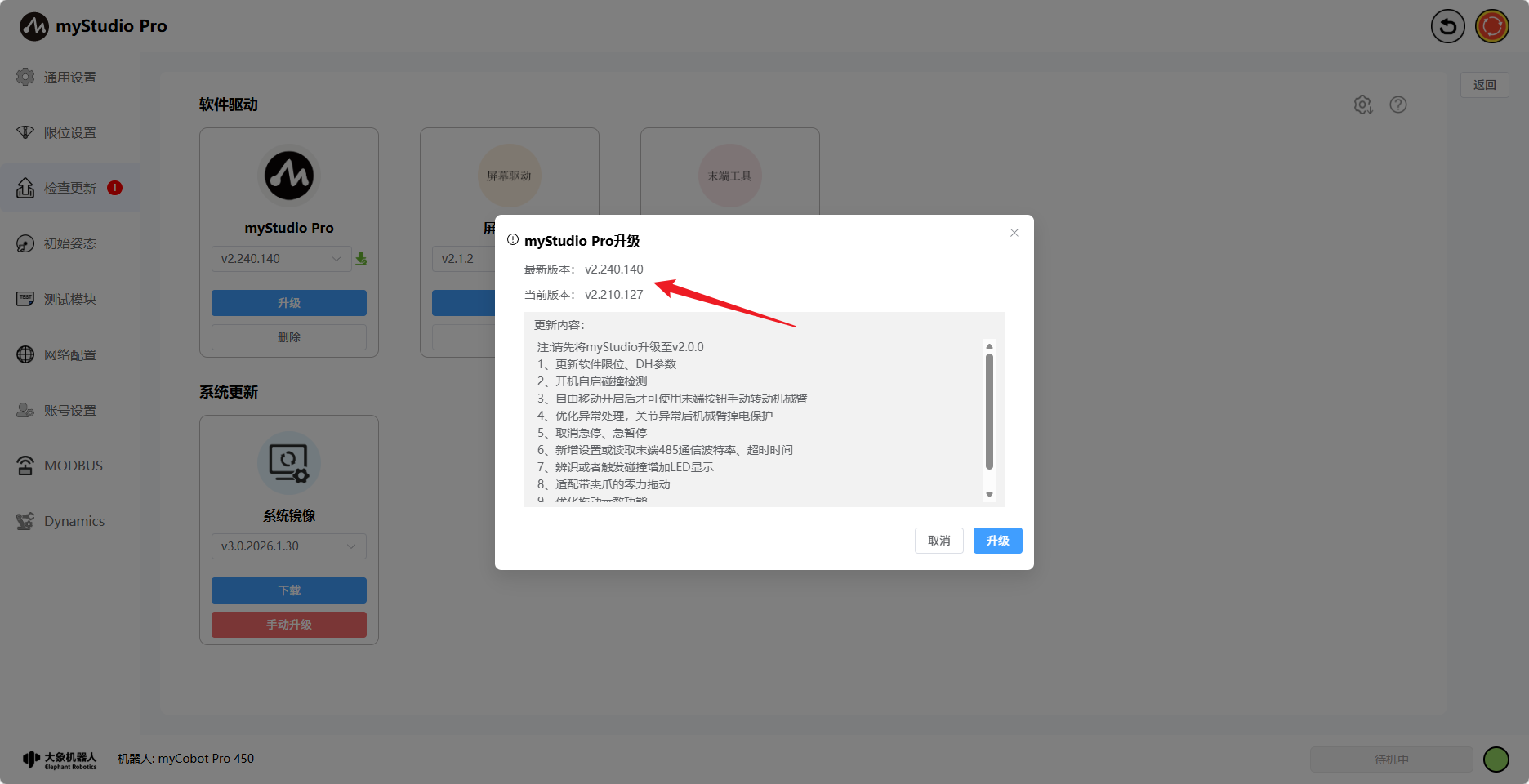
点击弹窗中的确认按钮时,会开始进行屏幕驱动的升级此时同时页面开启升级loading,升级完成后loading会消失同时会有对应的消息提示。
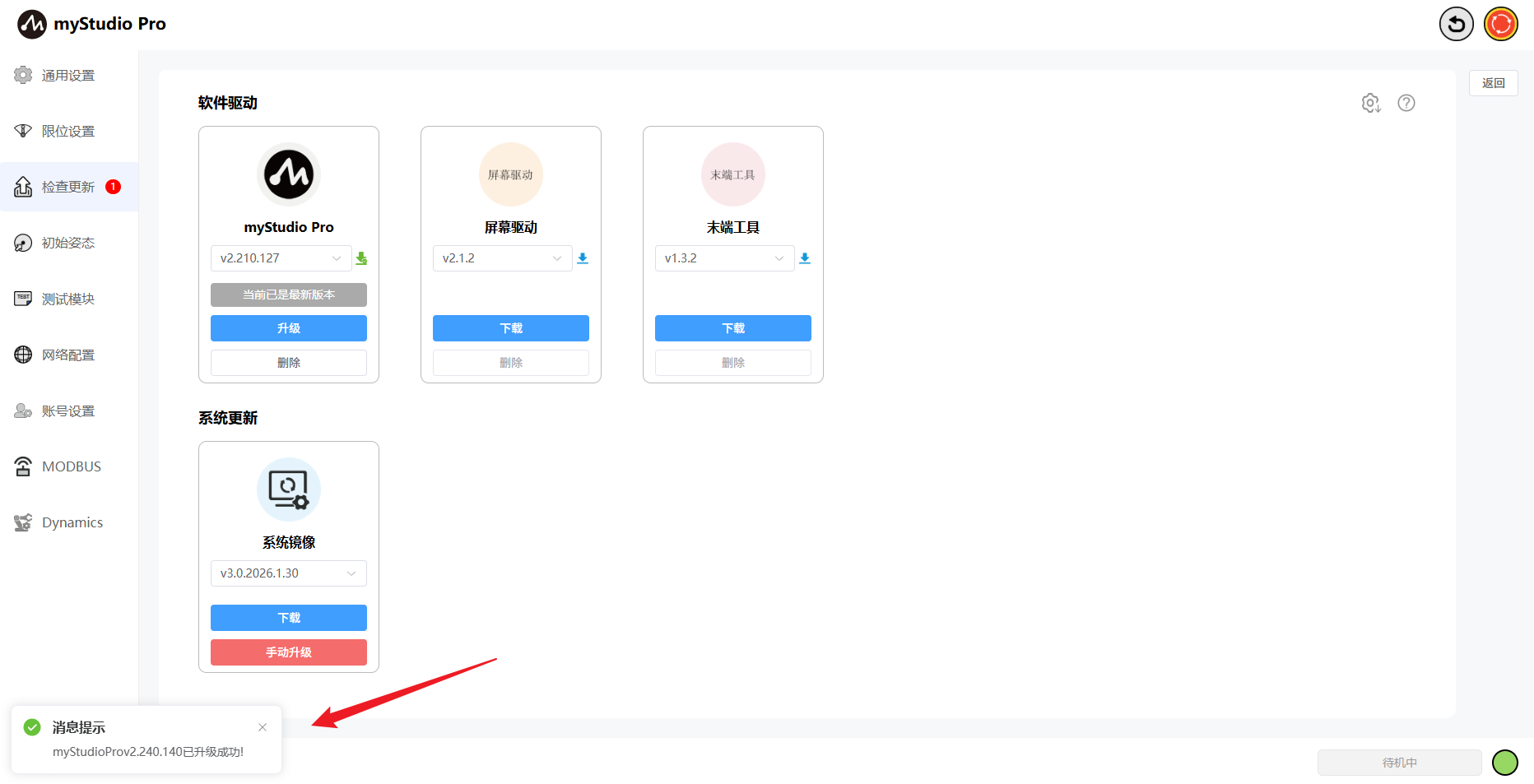
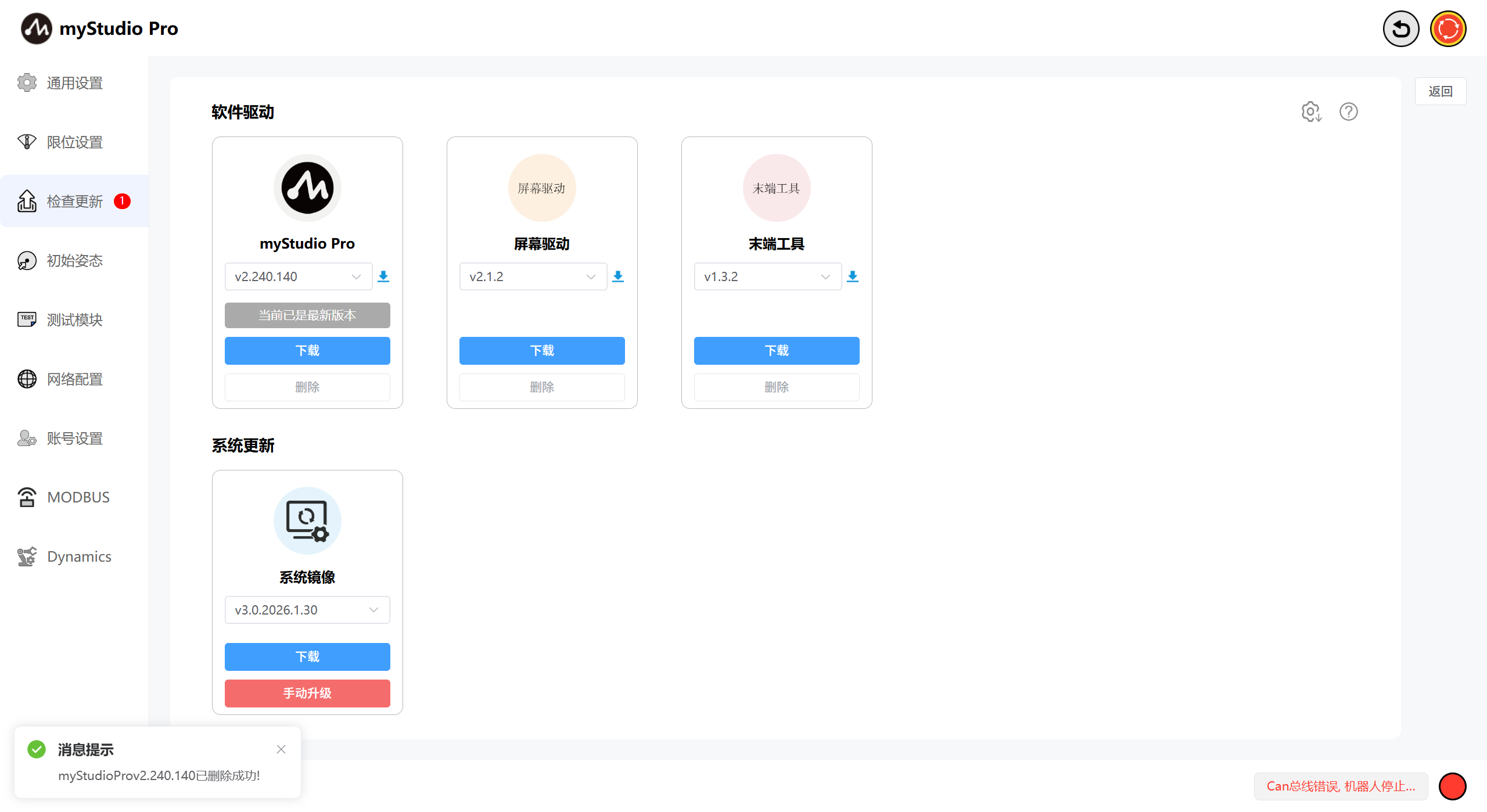
当机械臂已经升级至最新版本时会有当前已是最新版本的文字展示。

此时已完成myStudio Pro的升级操作。
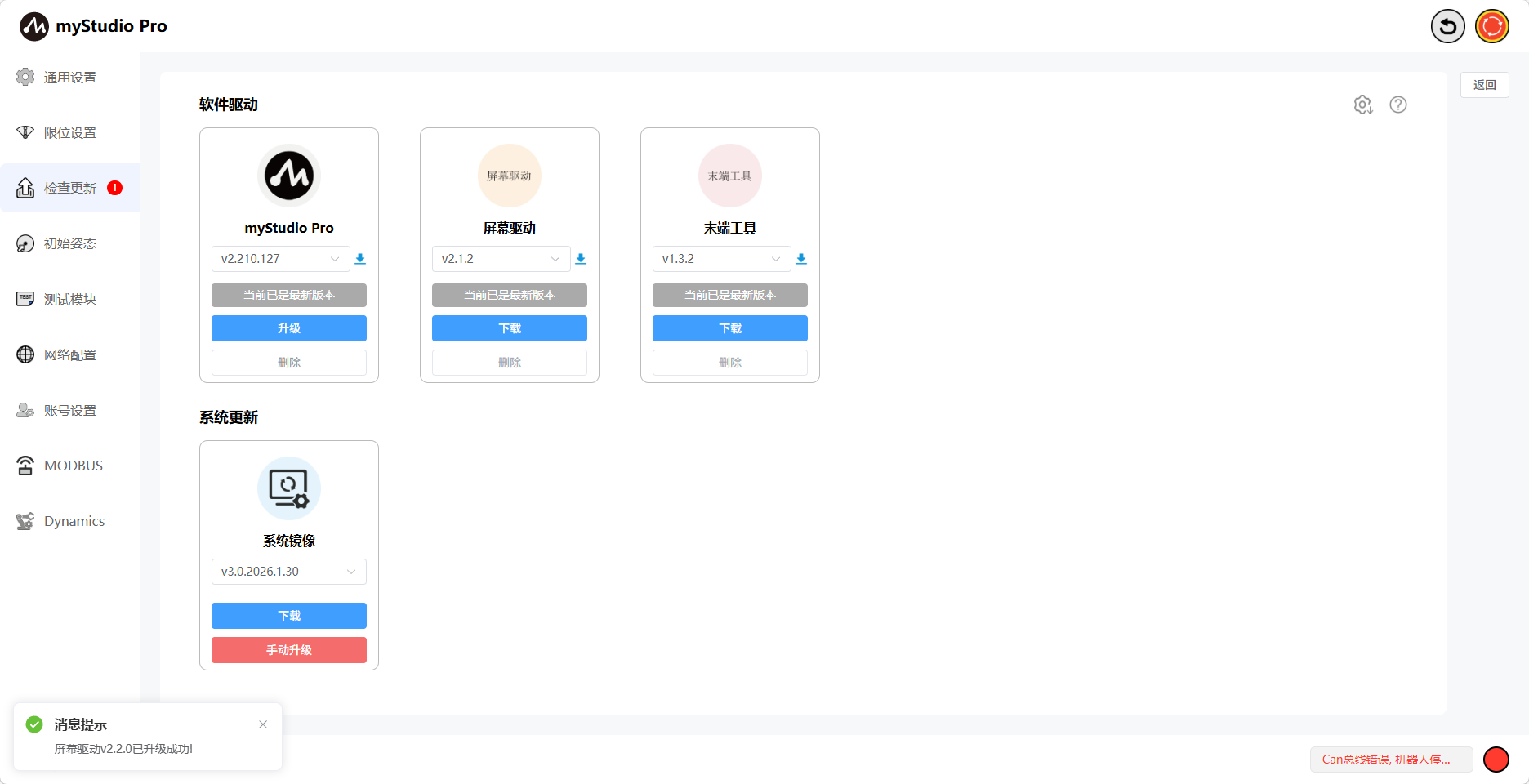
屏幕驱动固件升级
功能介绍:
屏幕驱动
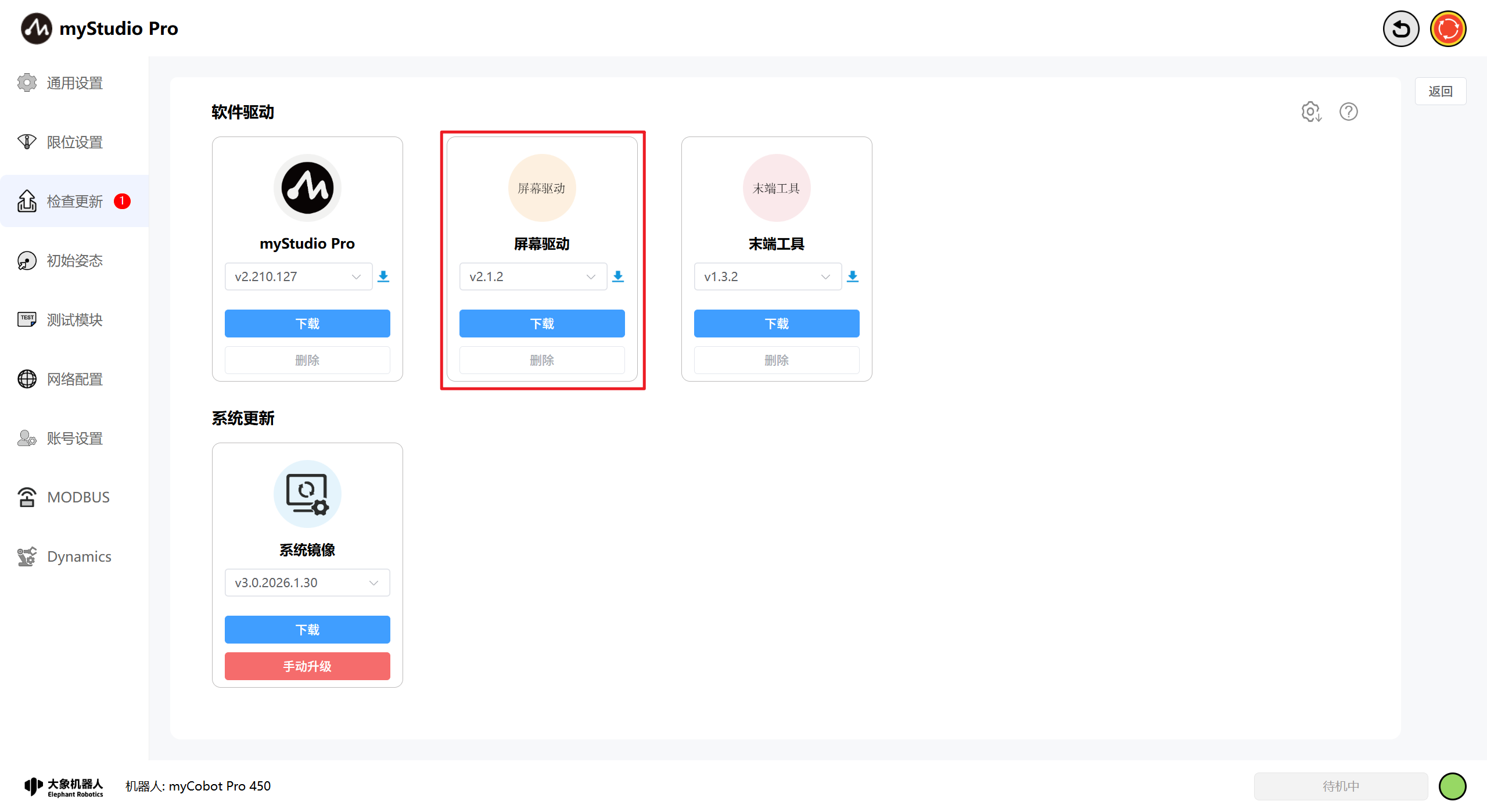
版本号
默认是机当前的版本,也可以选择其他的版本进行下载升级,当选择的版本为下载状态时版本旁的icon显示为蓝色,删除按钮禁用。
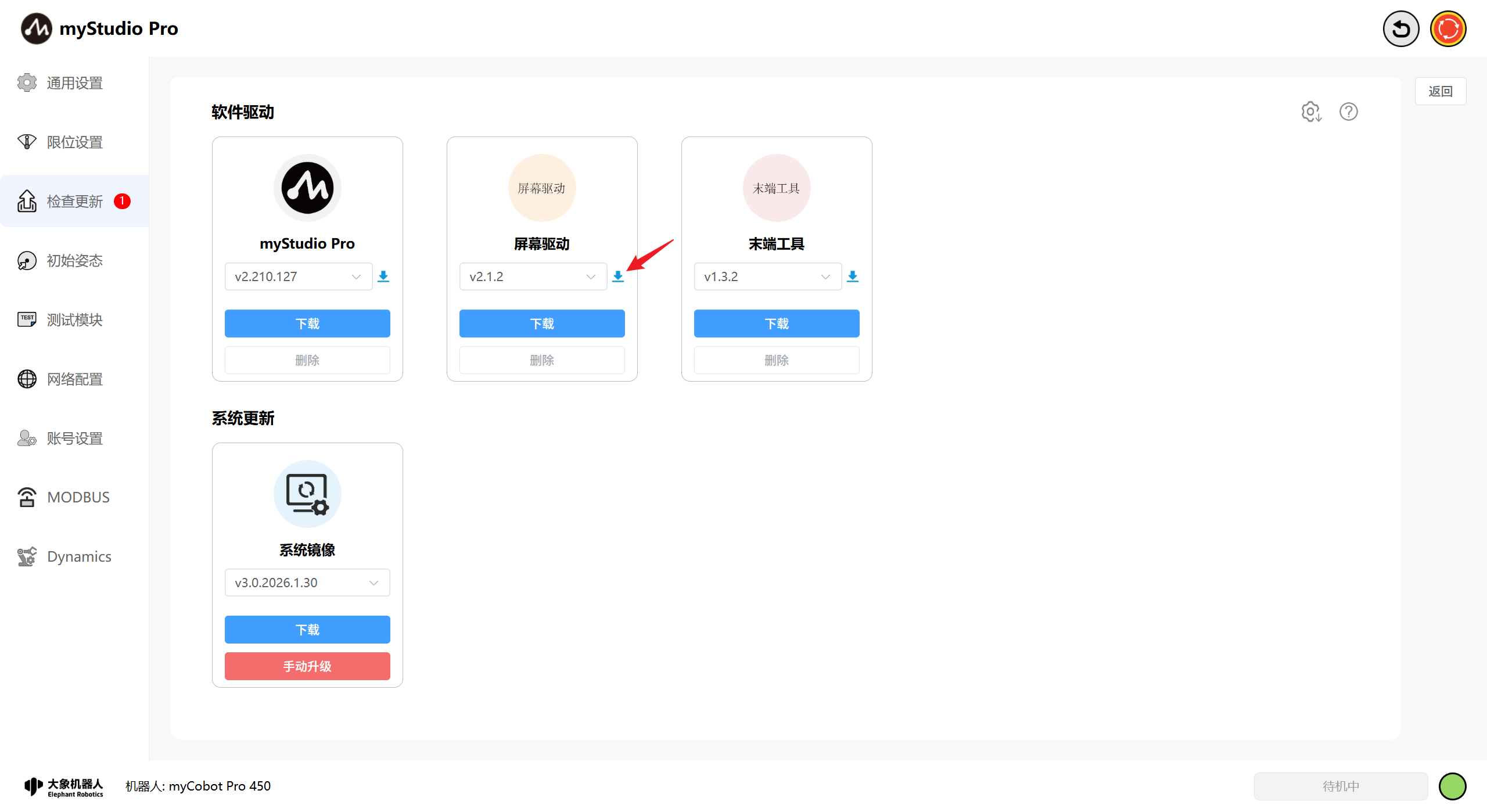
点击下载按钮会对选择版本进行下载操作,此时版本选择禁用,下载开始时会展示具体的下载进度。
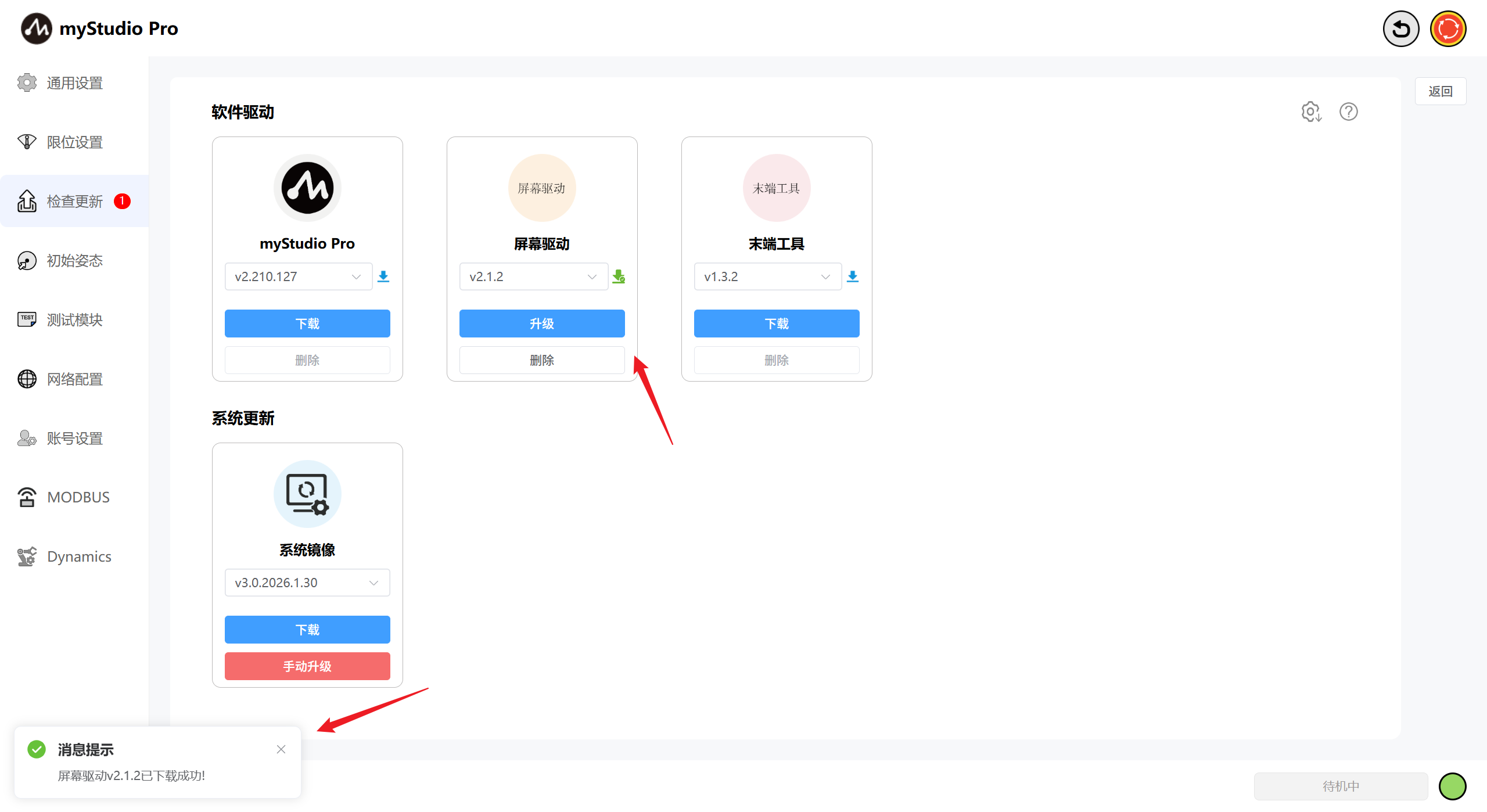
当下载完成时,icon显示为绿色下载进度条消失,同时升级按钮展示,删除按钮可用。
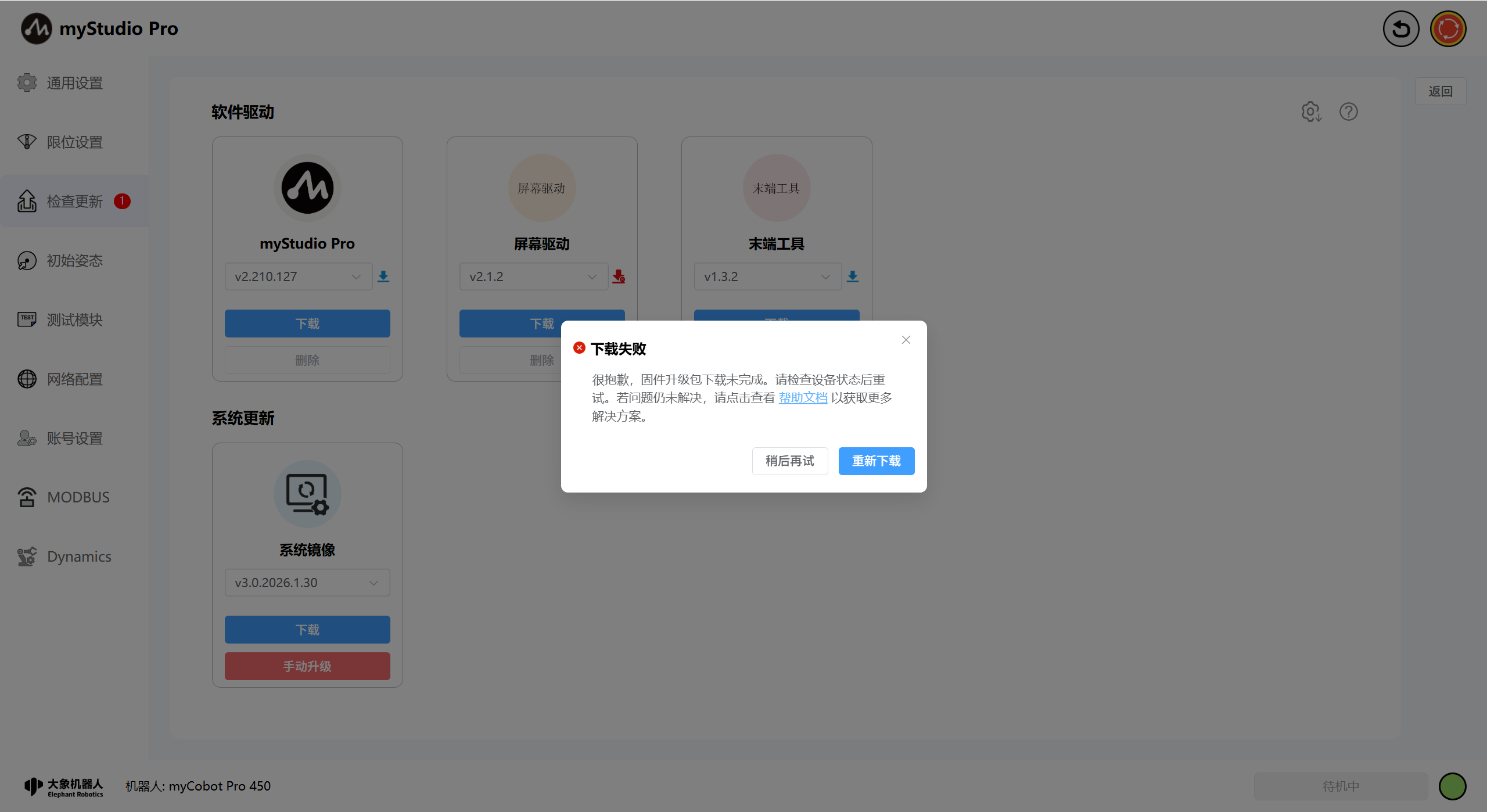
下载失败时会显示失败弹窗同时icon变为红色,点击重新下载按钮会对上一次所有下载失败的驱动进行重新下载。
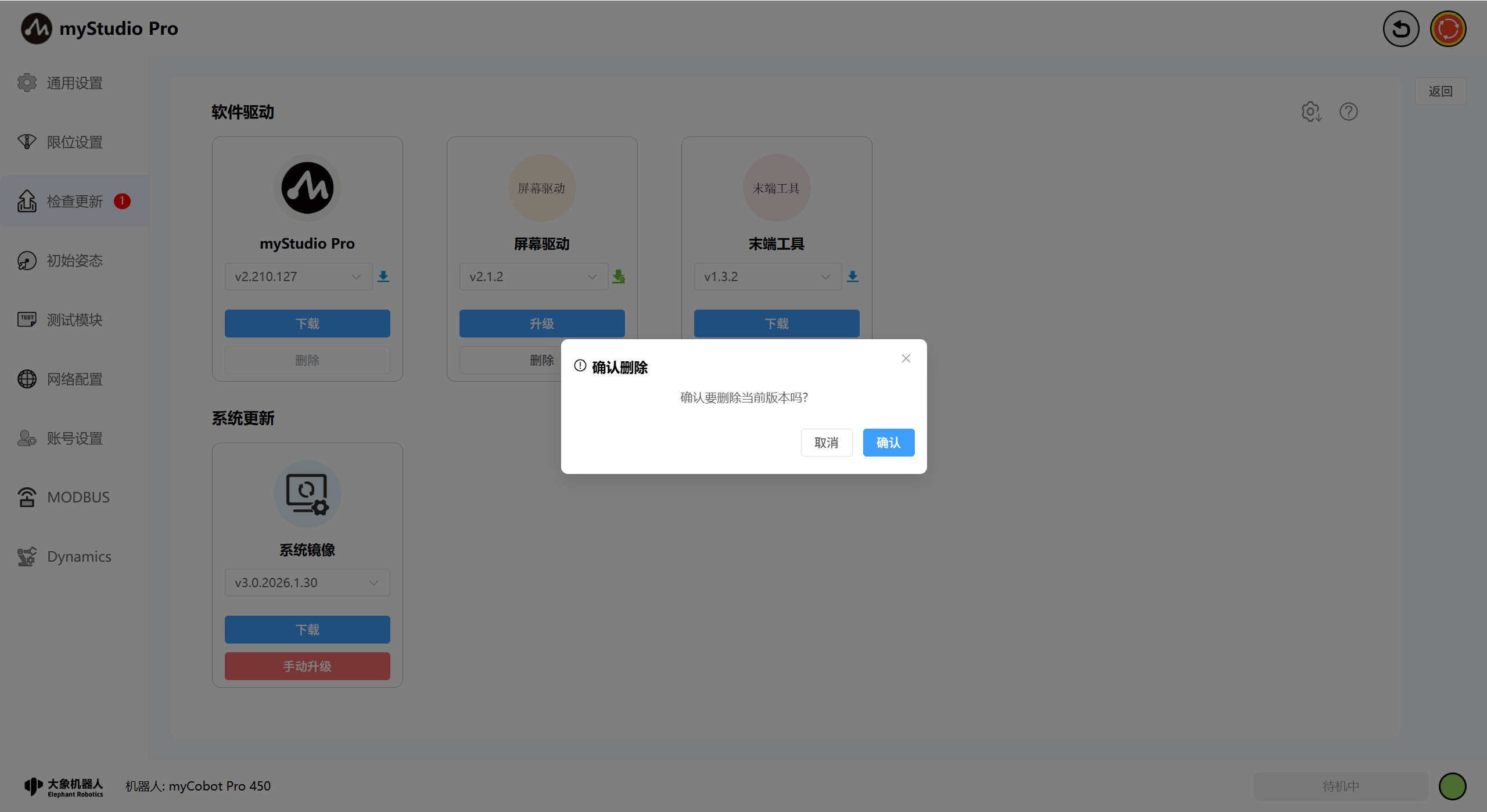
点击删除按钮时,会弹窗确认删除窗,点击确认按钮后会将已下载好的驱动删除。
点击升级按钮,会弹出该版本的更新内容、机械臂当前版本和最新版本。
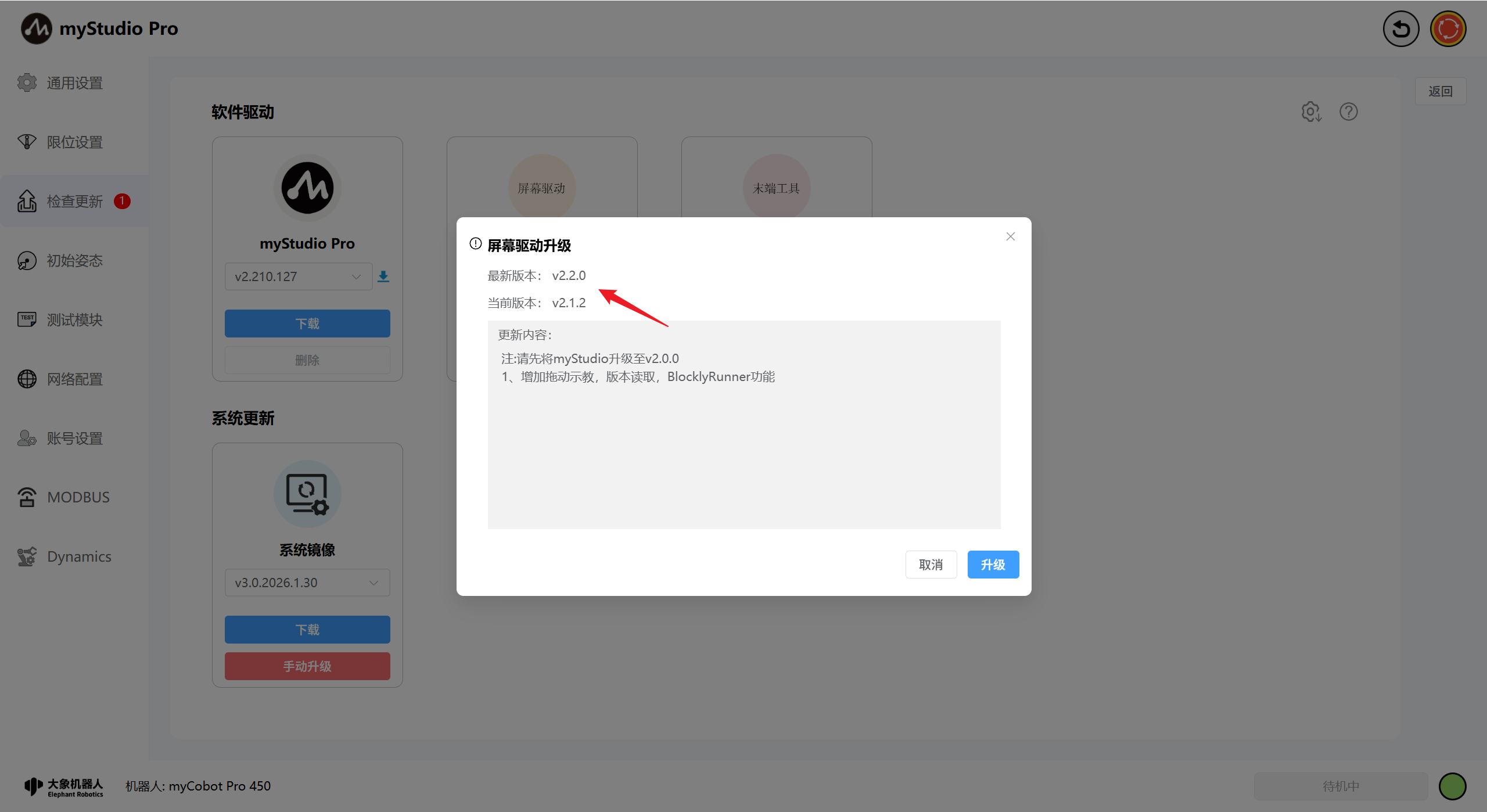
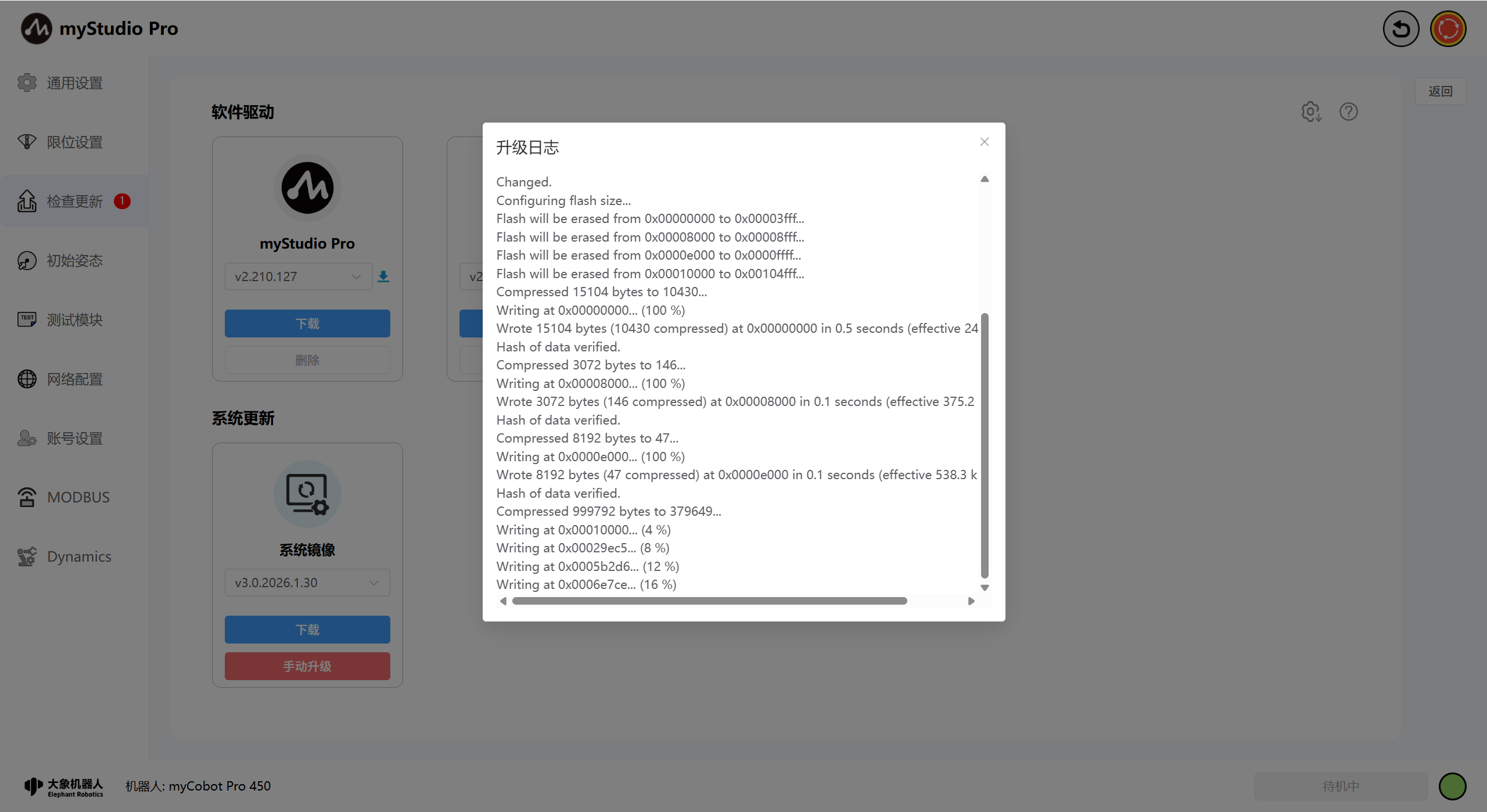
点击弹窗中的确认按钮时,会开始进行屏幕驱动的升级此时机械臂屏幕会黑屏,同时页面会实时展示升级日志,升级完成后会有对应的消息提示。
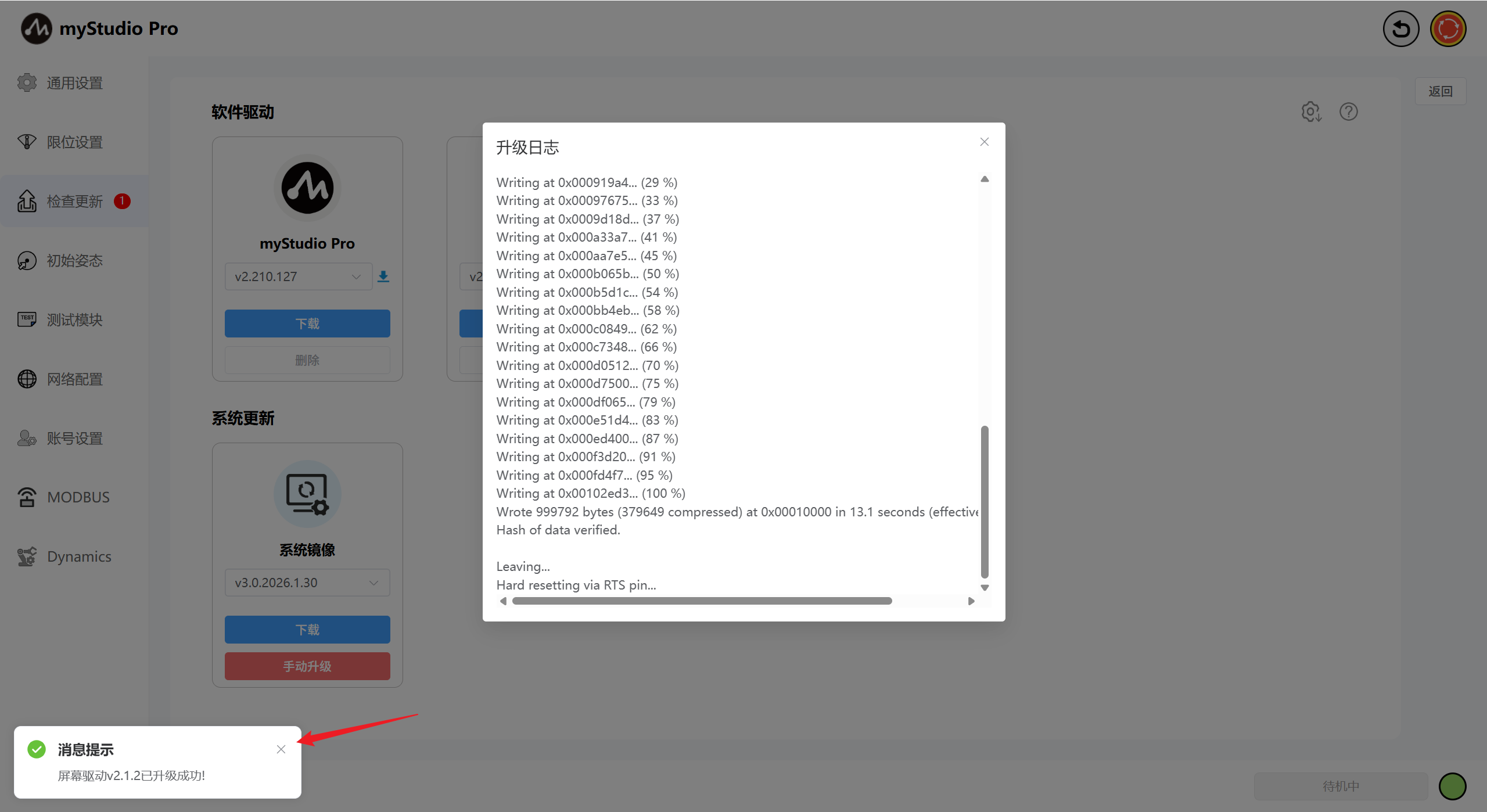
当机械臂已经升级至最新版本时会有当前已是最新版本的文字展示。
此时已完成屏幕驱动的升级操作。
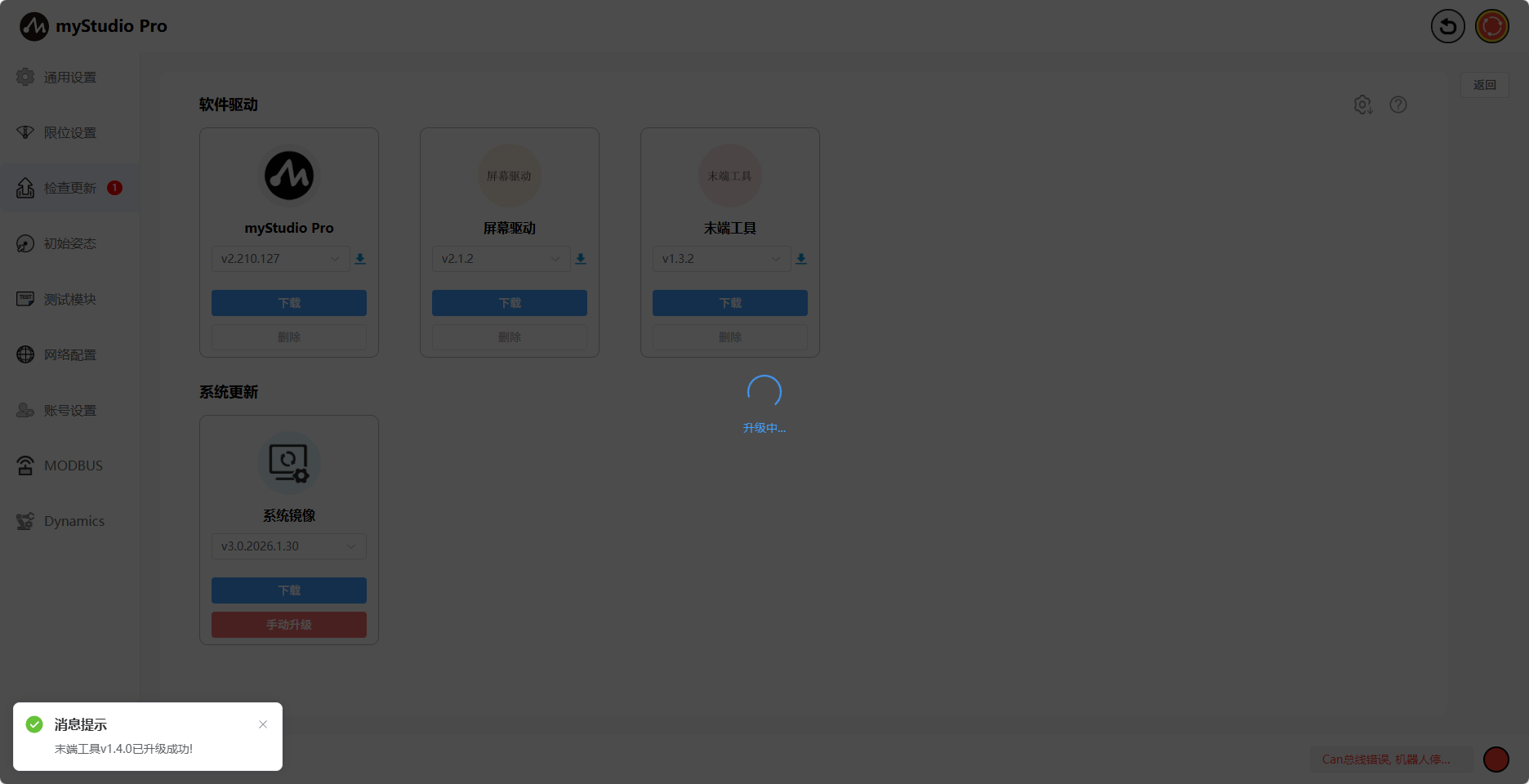
末端工具固件升级
功能介绍:
末端工具
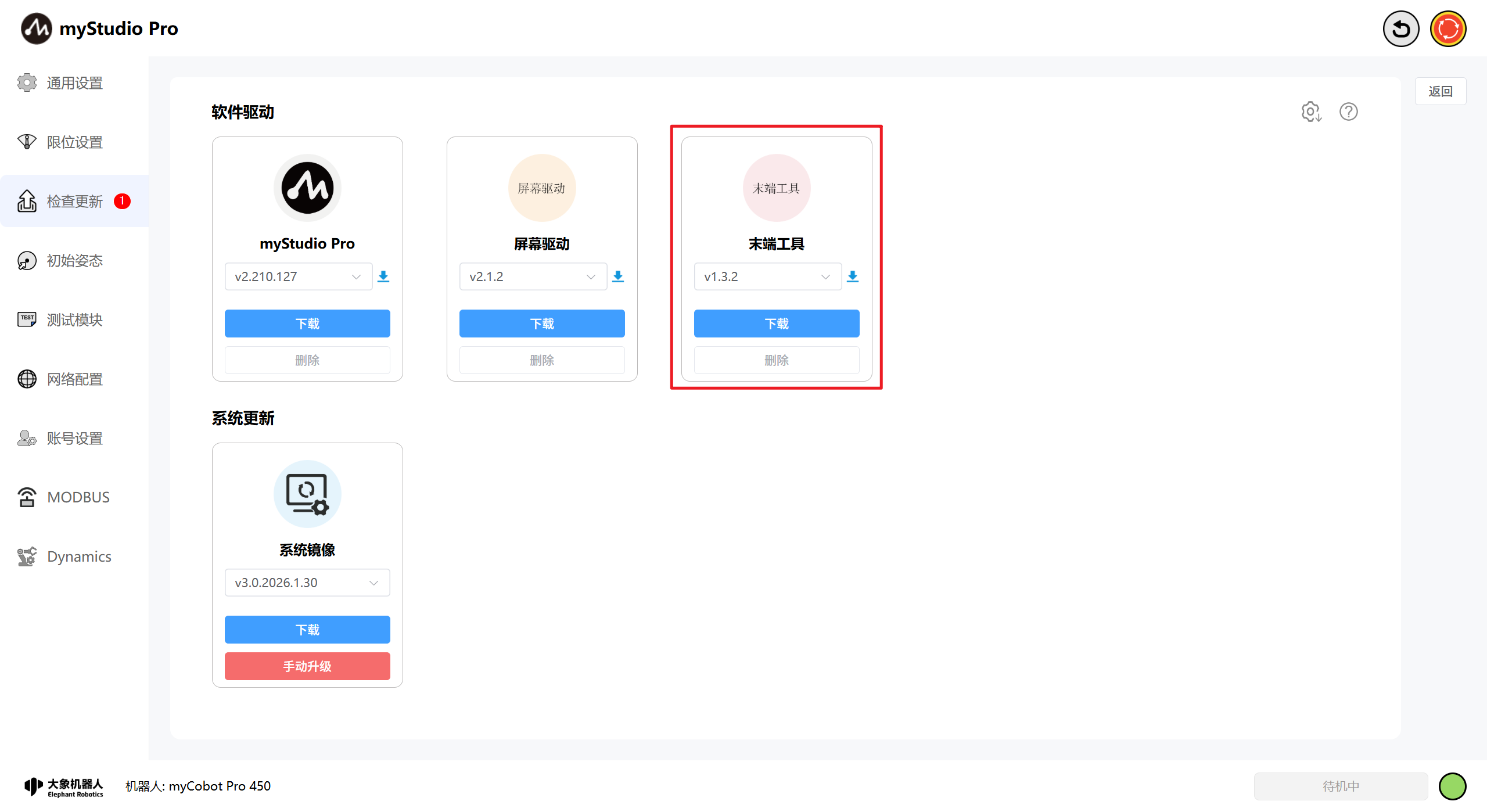
版本号
默认是机当前的版本,也可以选择其他的版本进行下载升级,当选择的版本为下载状态时版本旁的icon显示为蓝色,删除按钮禁用。
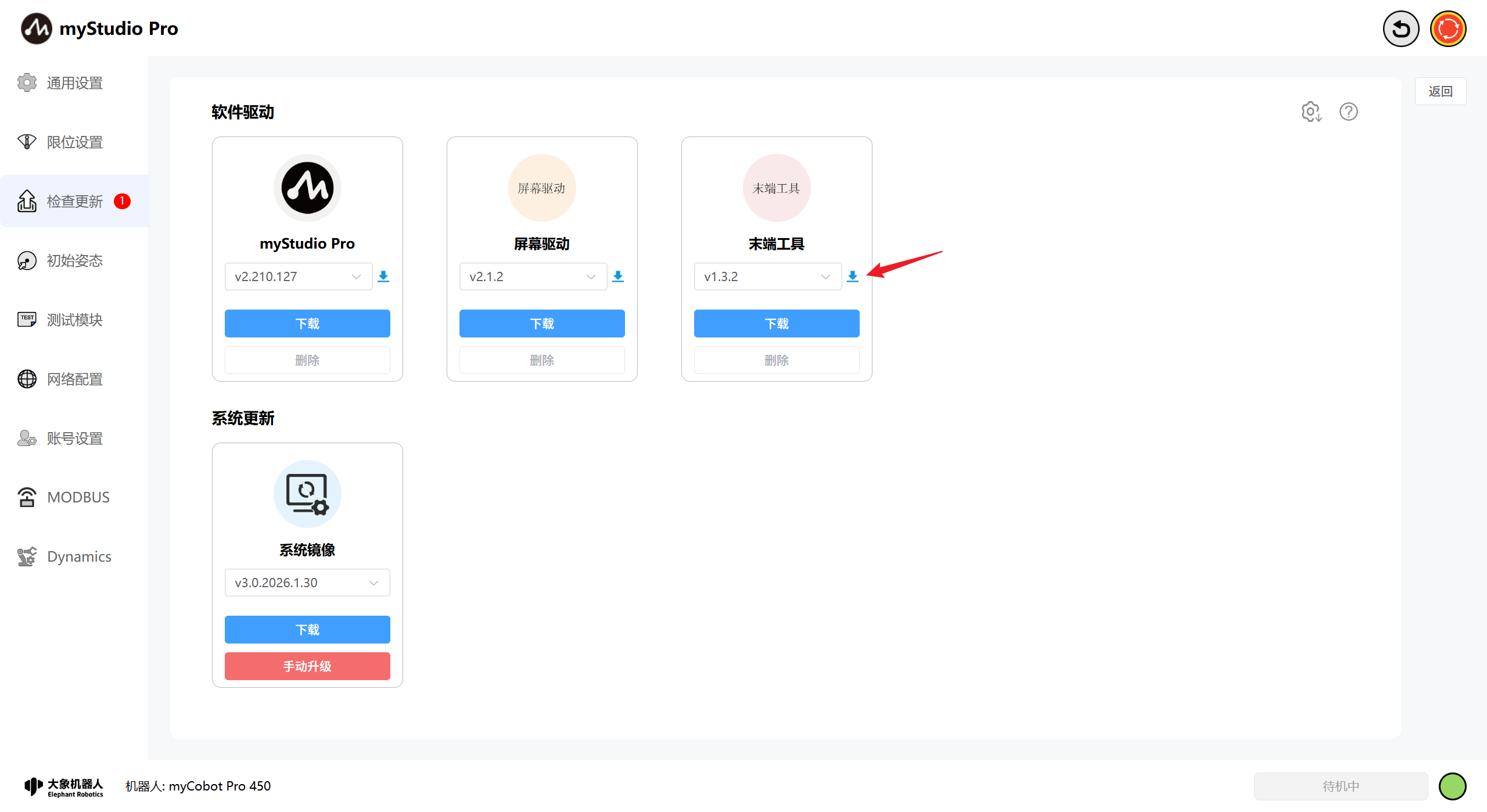
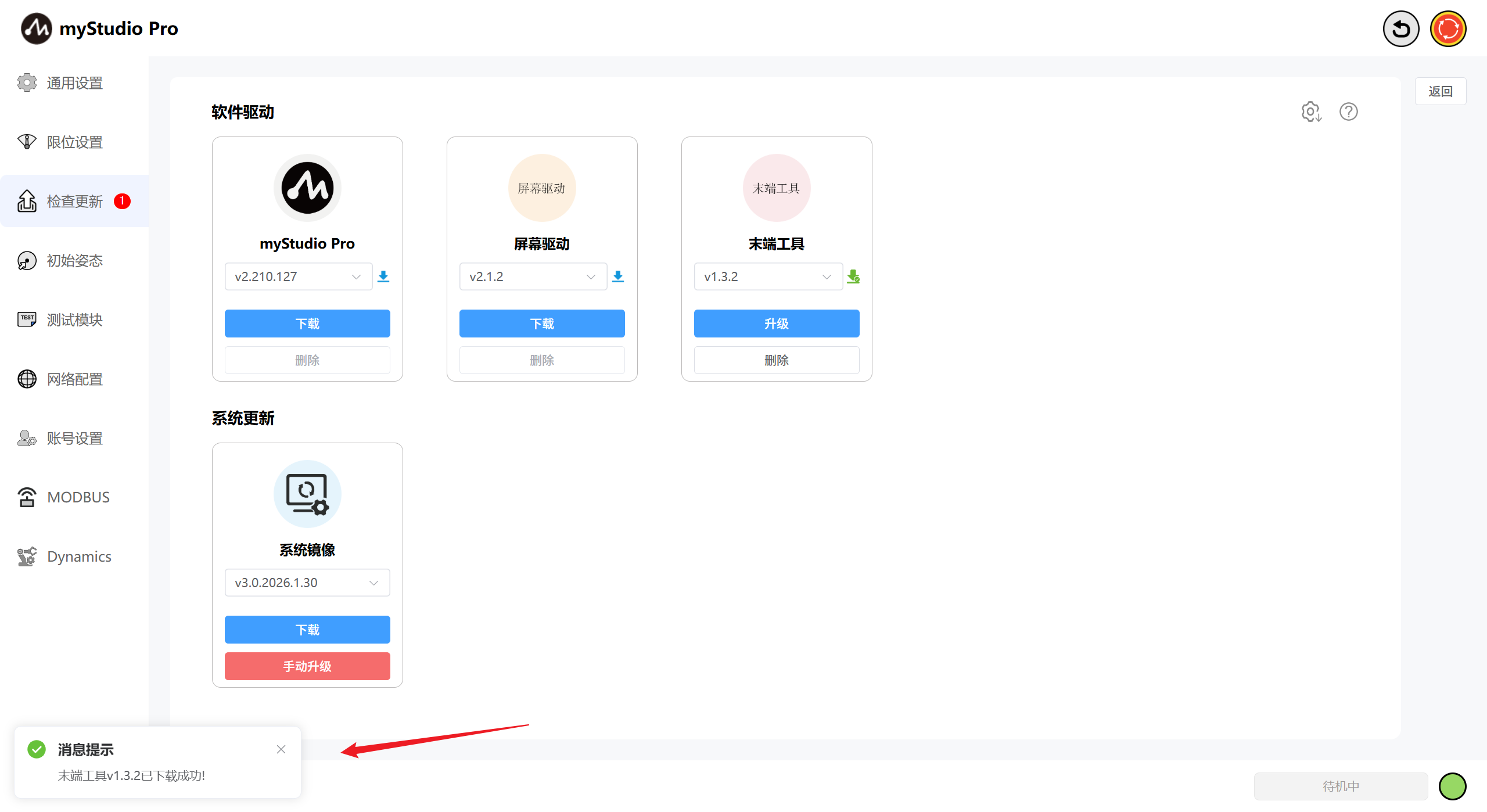
点击下载按钮会对选择版本进行下载操作,此时版本选择禁用,下载开始时会展示具体的下载进度。
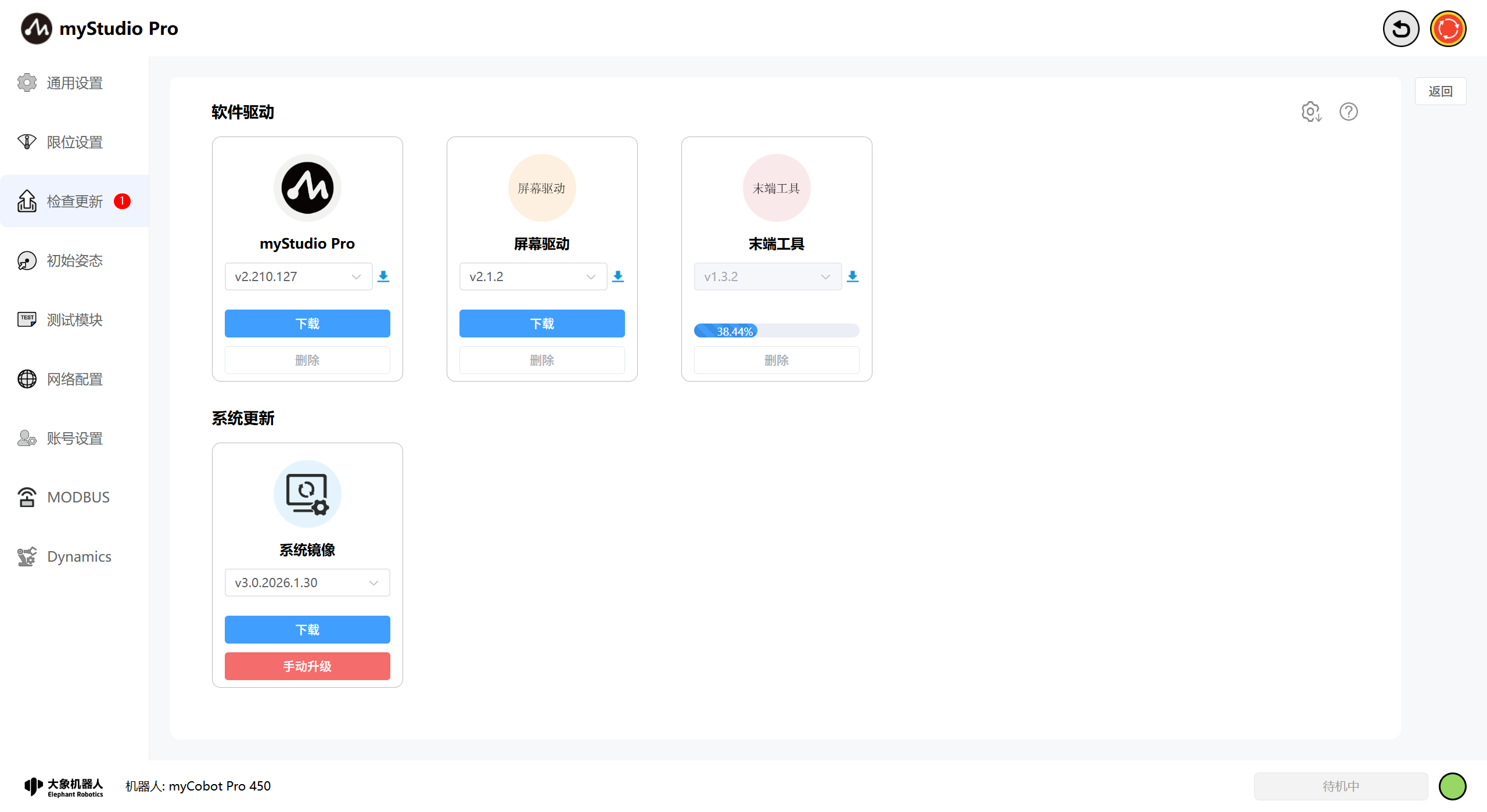
当下载完成时,icon显示为绿色下载进度条消失,同时升级按钮展示,删除按钮可用。
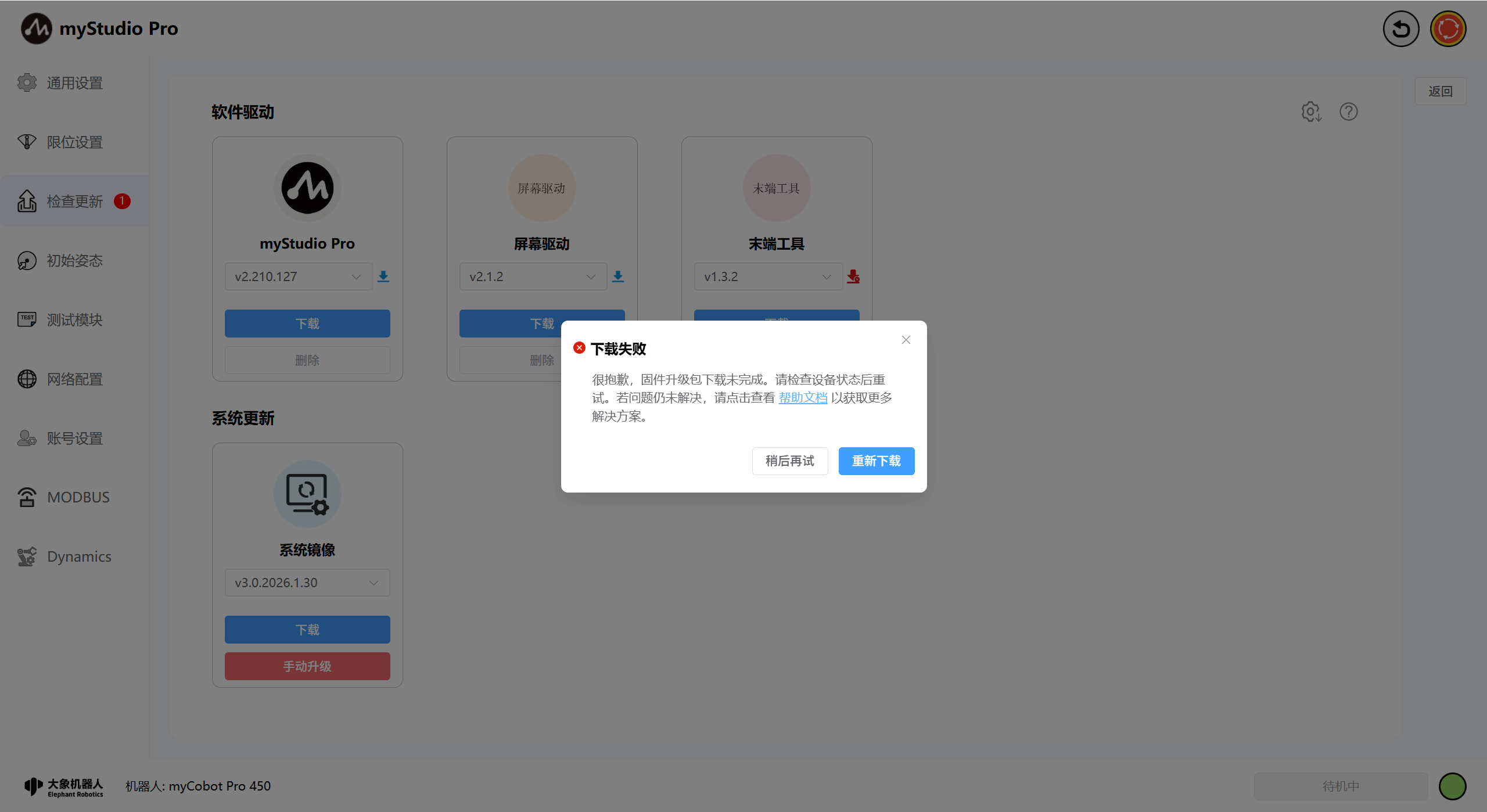
下载失败时会显示失败弹窗同时icon变为红色,点击重新下载按钮会对上一次所有下载失败的驱动进行重新下载。。
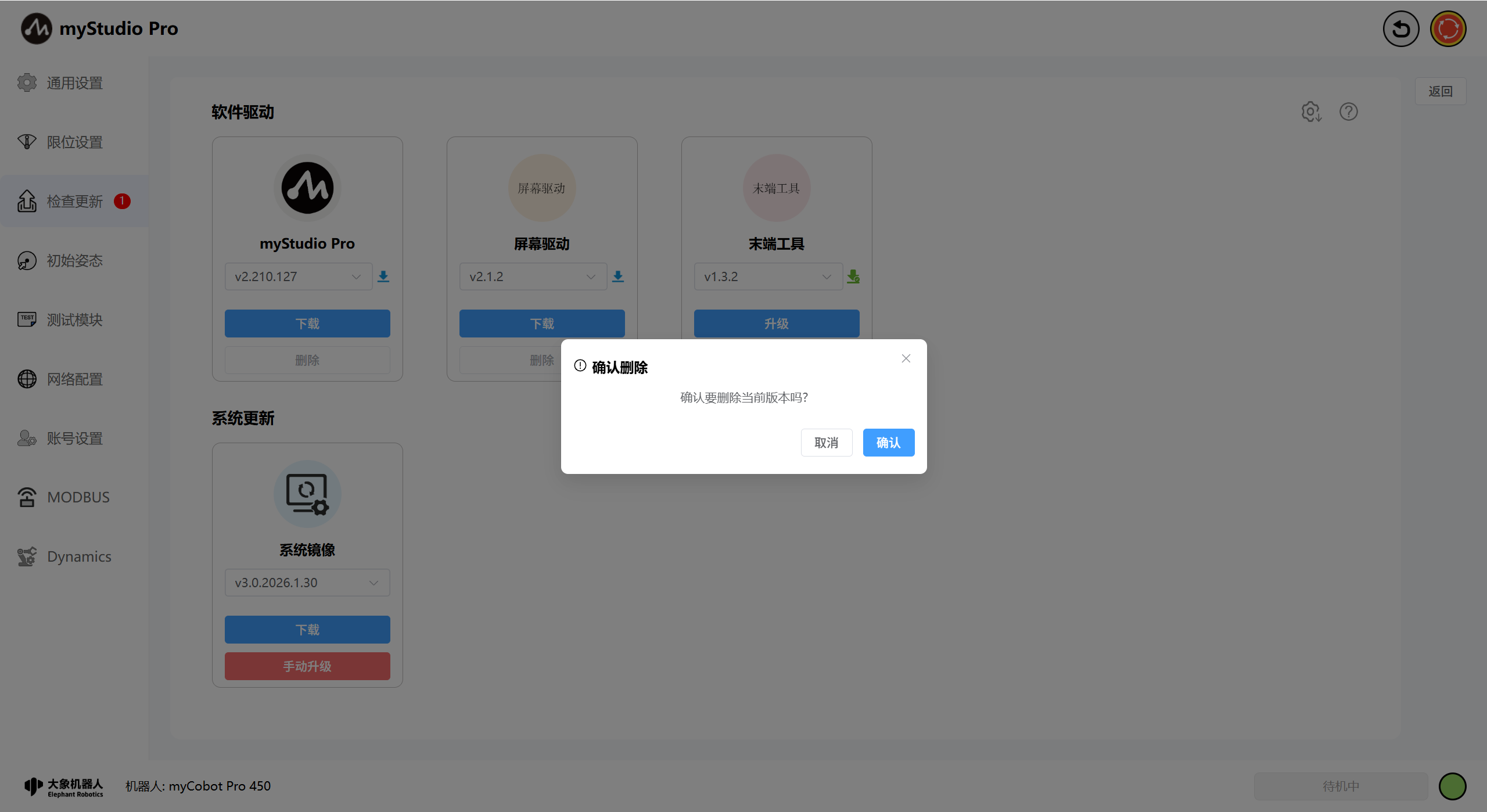
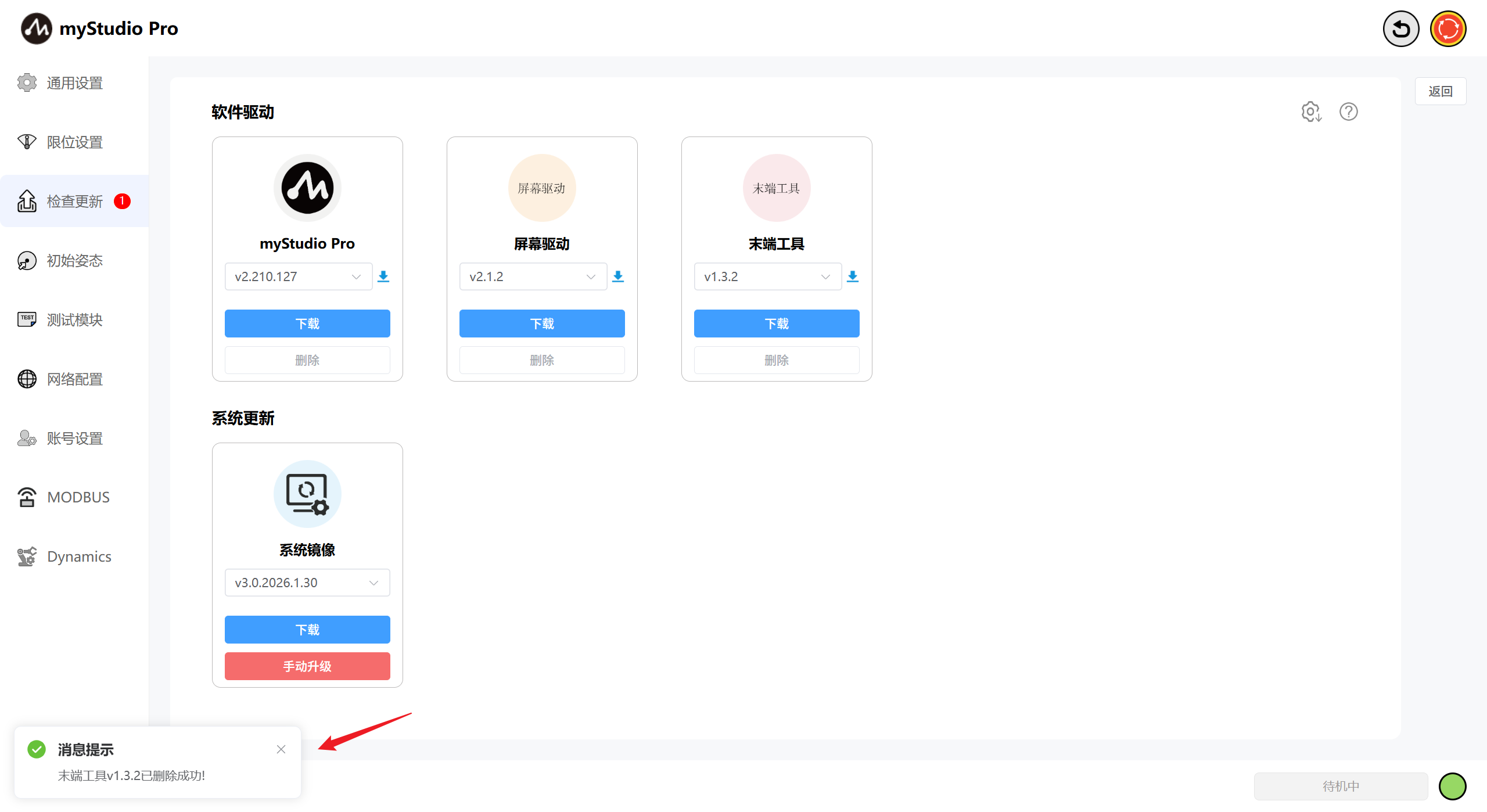
点击删除按钮时,会弹窗确认删除窗,点击确认按钮后会将已下载好的驱动删除。
点击升级按钮,会弹出该版本的更新内容、机械臂当前版本和最新版本。
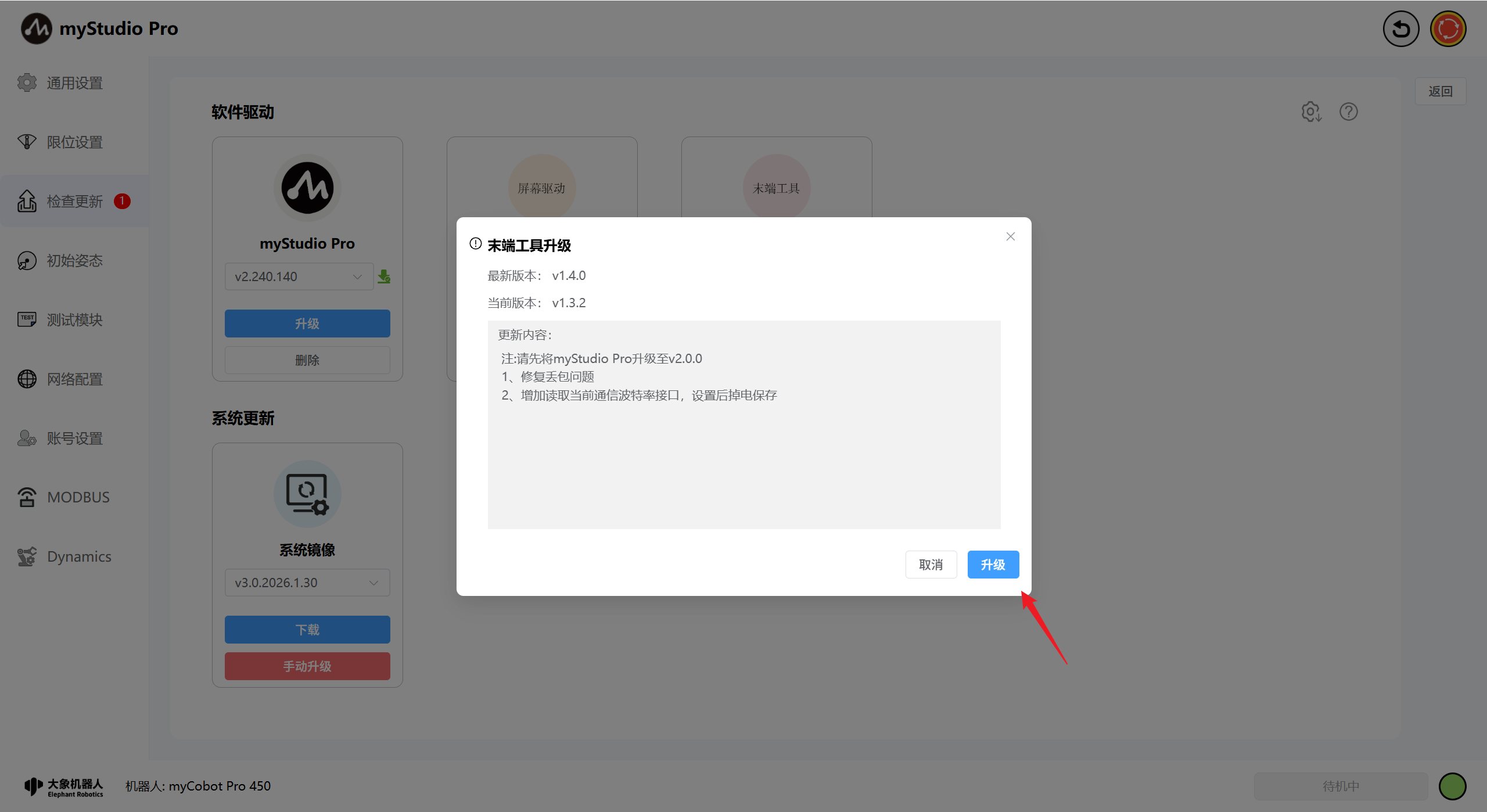
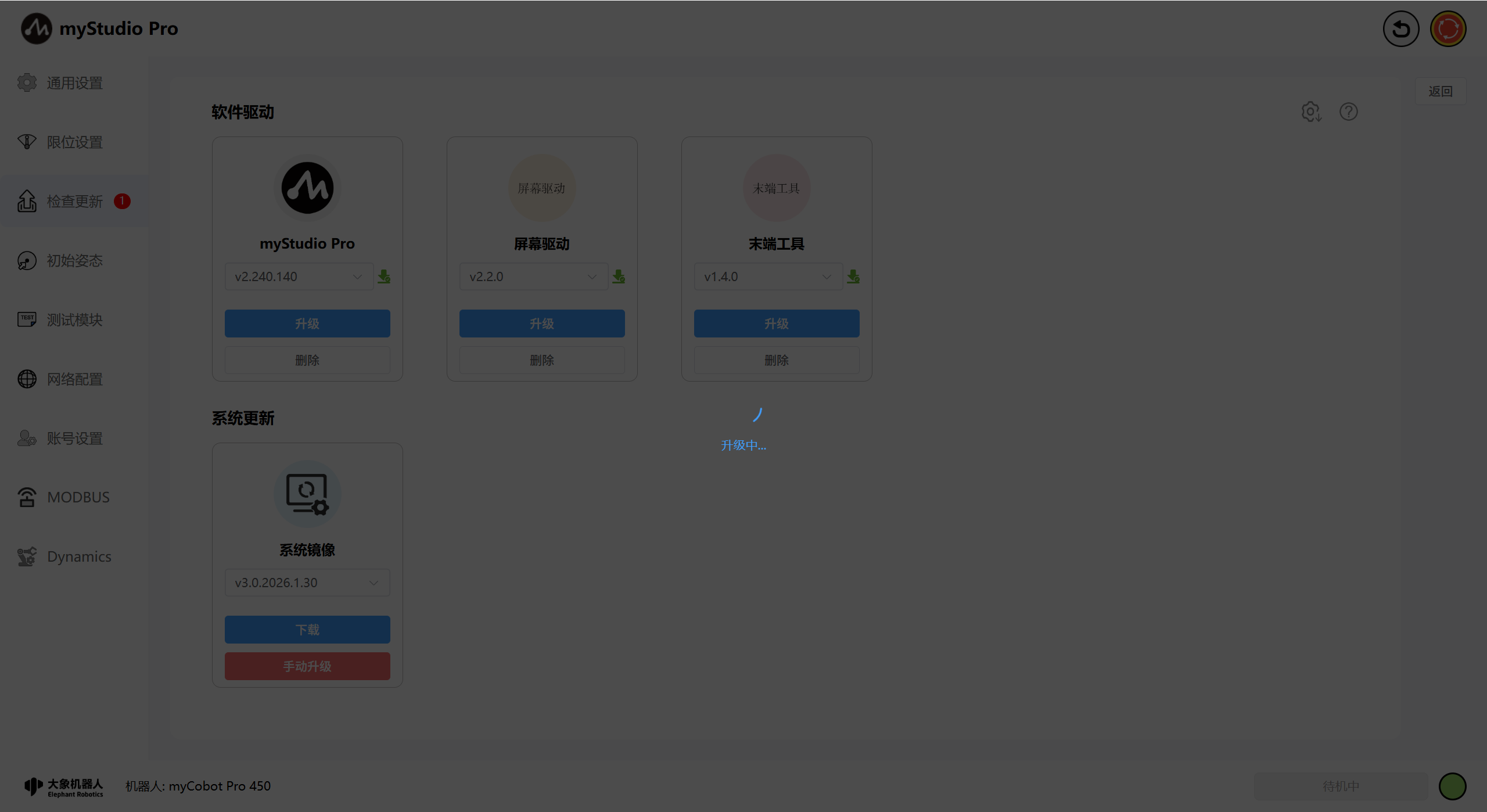
点击弹窗中的确认按钮时,会开始进行屏幕驱动的升级此时同时页面开启升级loading,升级完成后loading会消失同时会有对应的消息提示。
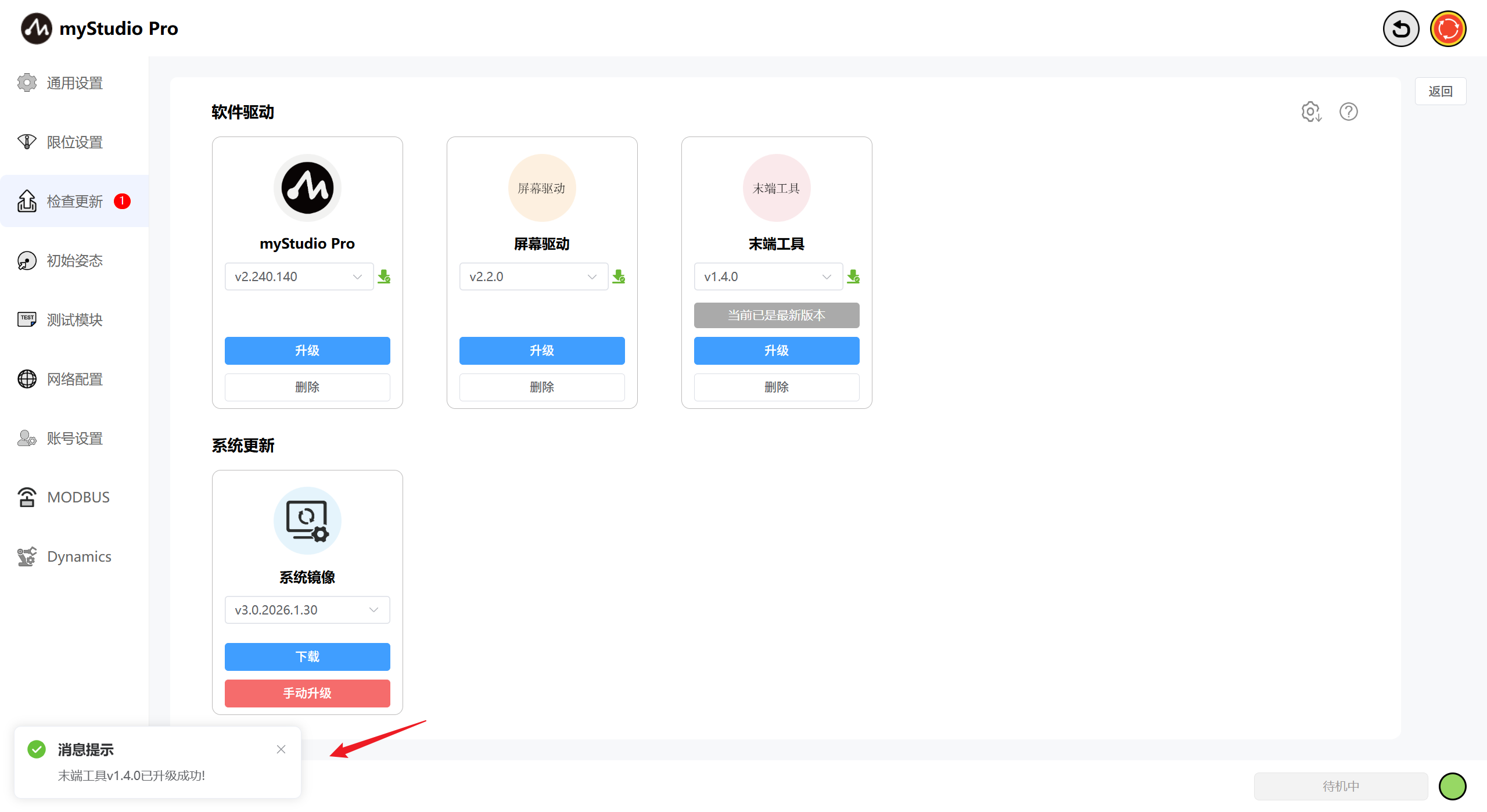
当机械臂已经升级至最新版本时会有当前已是最新版本的文字展示。
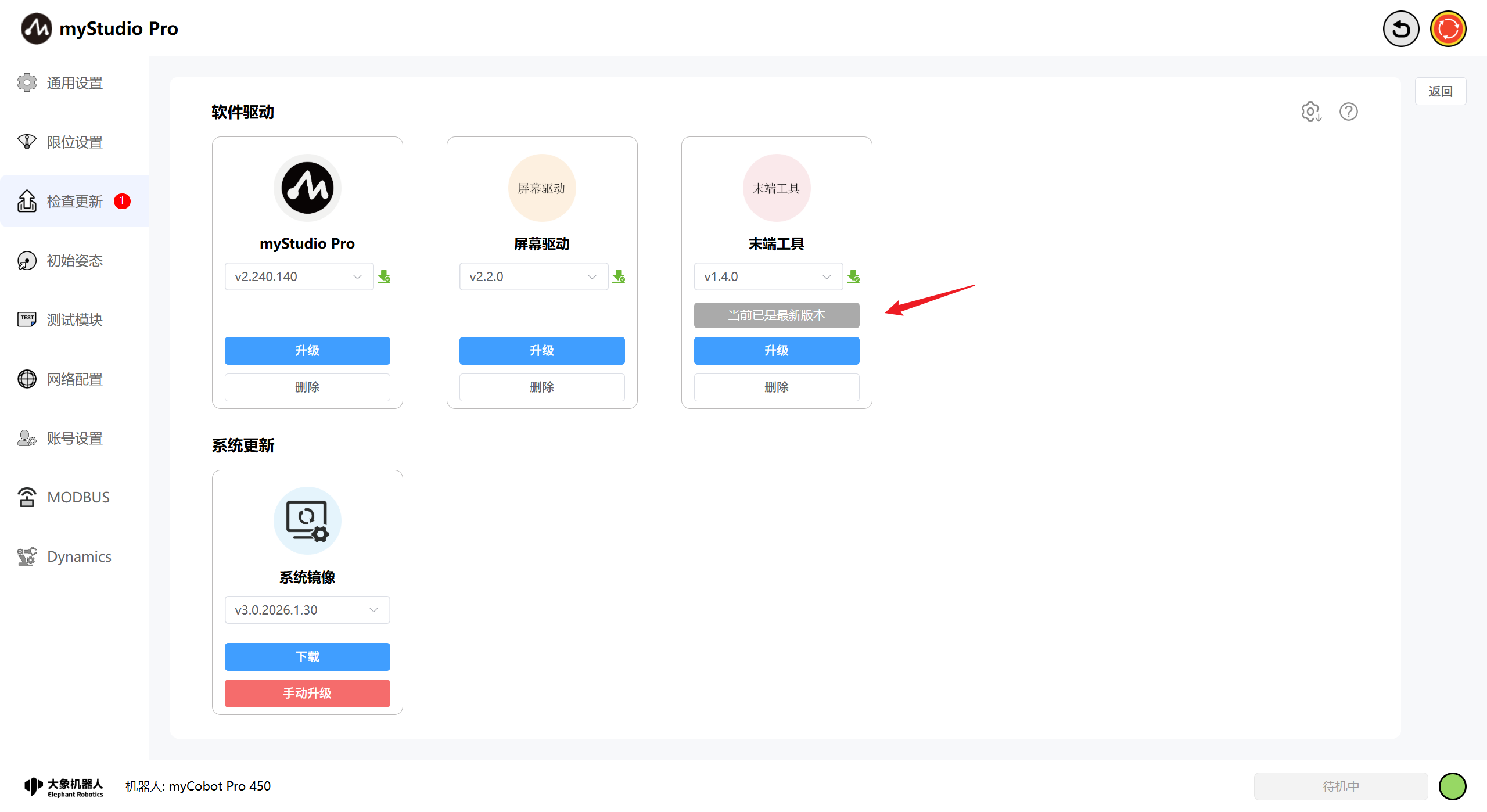
此时已完成末端工具的升级操作。
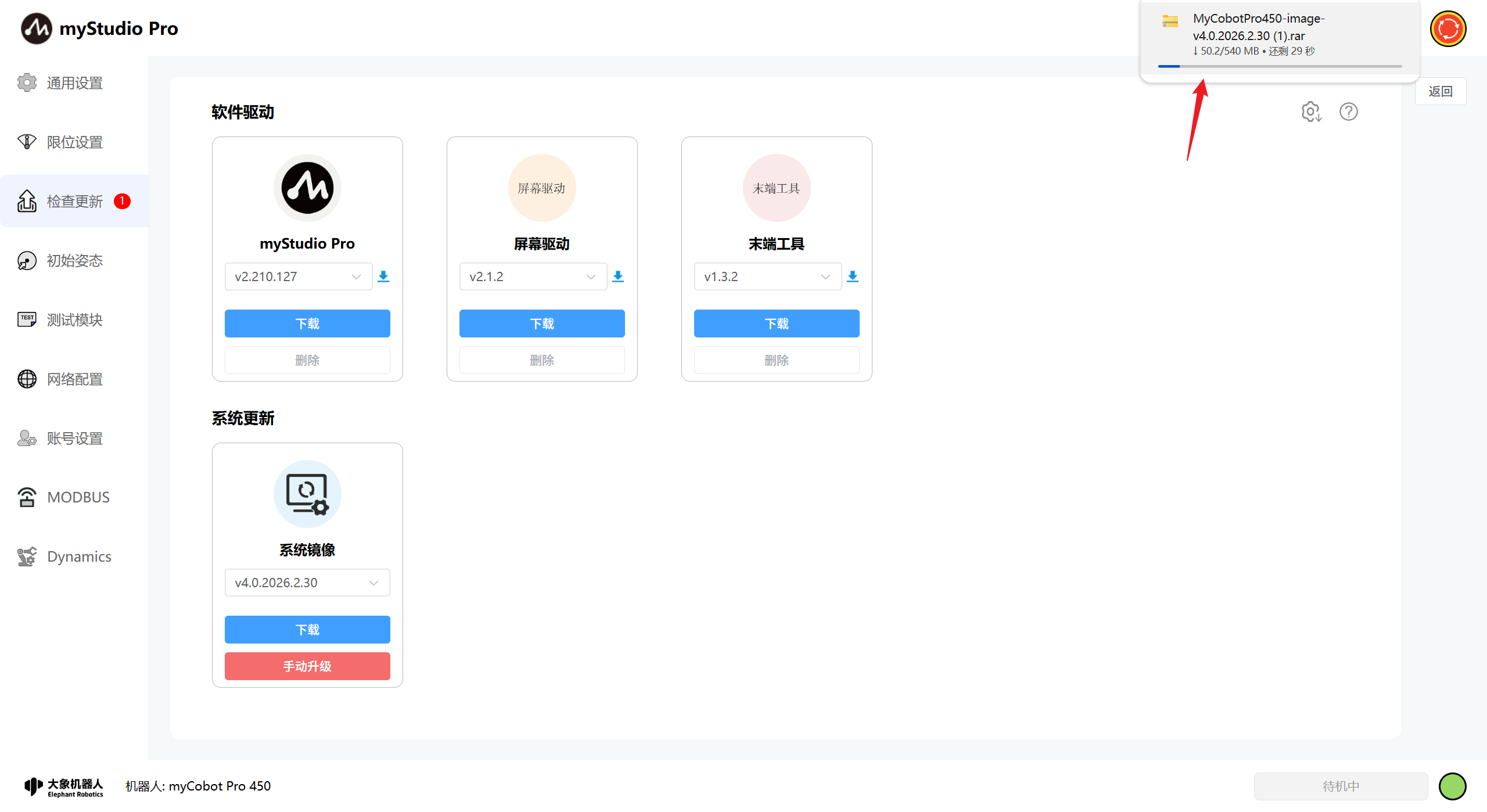
此外,该页面还提供了系统镜像下载和手动升级按钮。
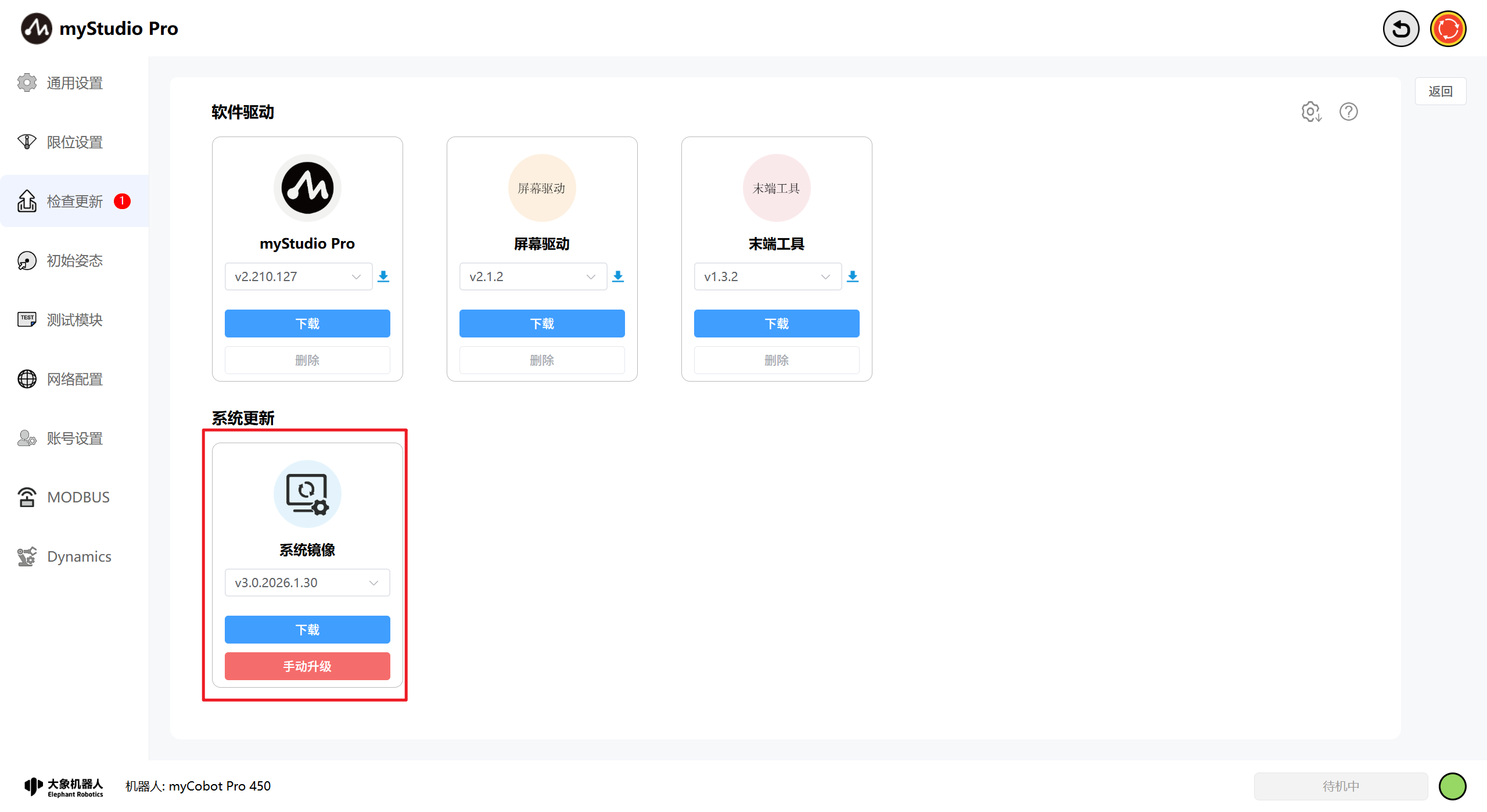
点击下载按钮会将选择的镜像版本下载至本地,下载文件内容包含 镜像、烧录工具、说明。
点击手动升级按钮,会有内容弹窗,详见内容弹窗文字说明,点击<系统镜像升级章节>可进行跳转具体升级步骤可在跳转页查看。

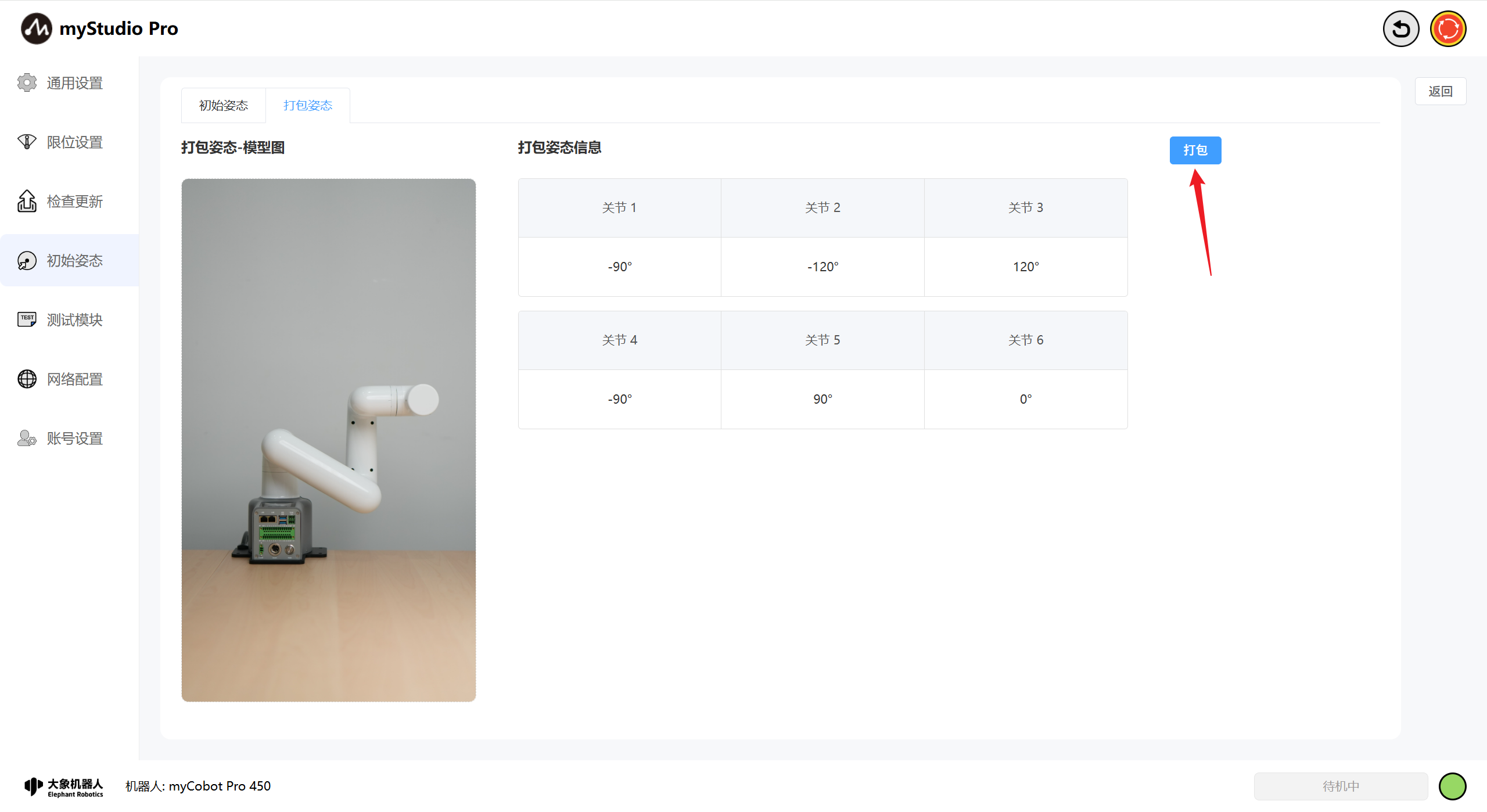
5 初始姿态
点击初始姿态图标按钮, 将进入初始姿态页面,该页面包含初始姿态和打包姿态内容,可通过切换按钮对需访问的内容进行切换。
初始姿态页面:显示机械臂的初始姿态模型图、关节角度信息和坐标姿态信息。
打包姿态页面:显示机械臂的打包姿态模型图、关节角度信息、打包按钮此按钮为功能按钮,点击该按钮时机械臂将运动到打包姿态。
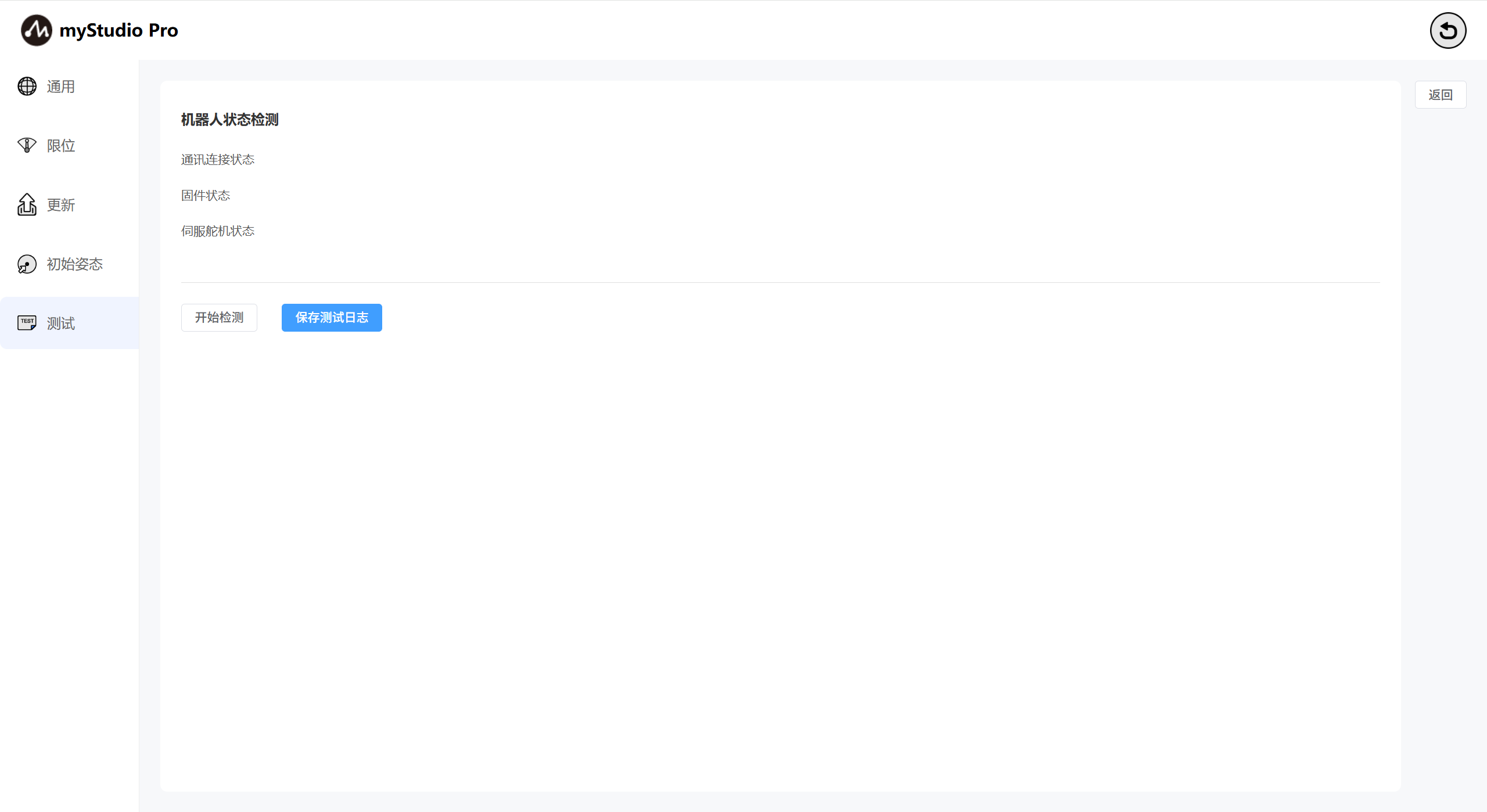
6 测试模块
点击 测试模块 图标按钮,将进入测试页面。
测试 页面:主要测试机械臂的通讯连接、固件版本、舵机等状态。
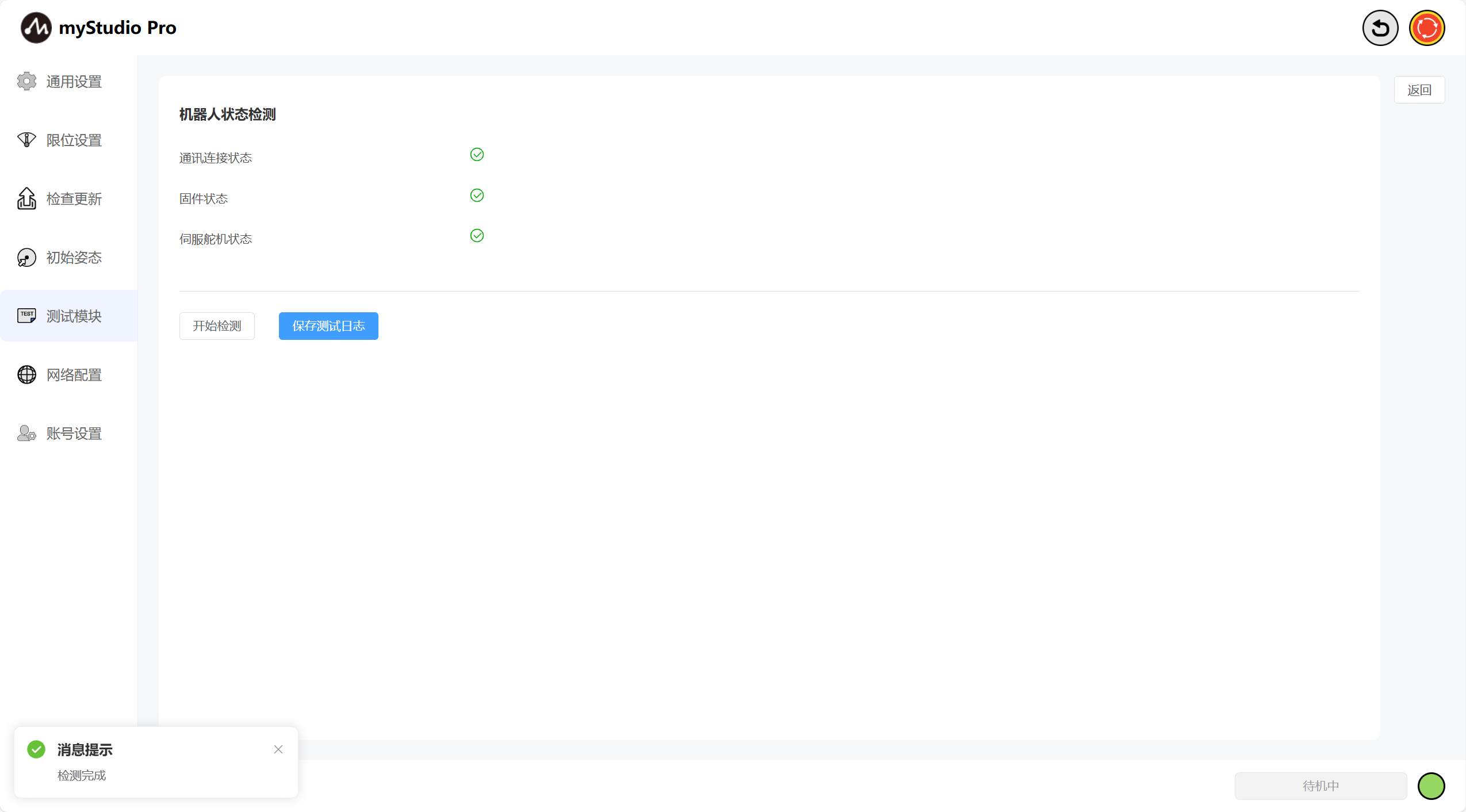
点击 开始检测 按钮,即可开始进行测试。
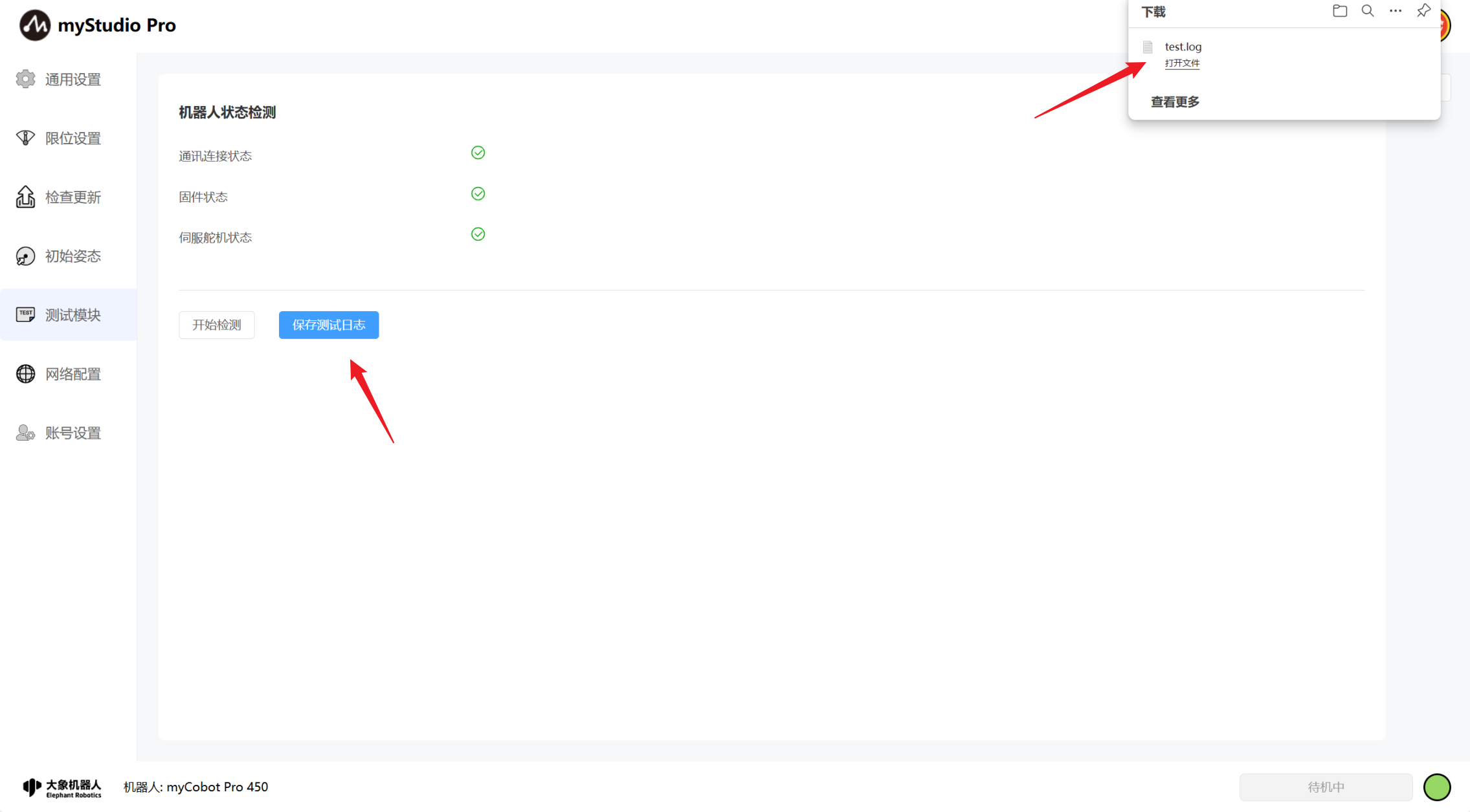
测试完成后,点击 保存测试日志 按钮,测试完成每一测试项后会展示本次测试的结果是否通过,绿色代表正常,反之不正常,可将测试结果保存到本地日志文件进行具体测试内容查看。
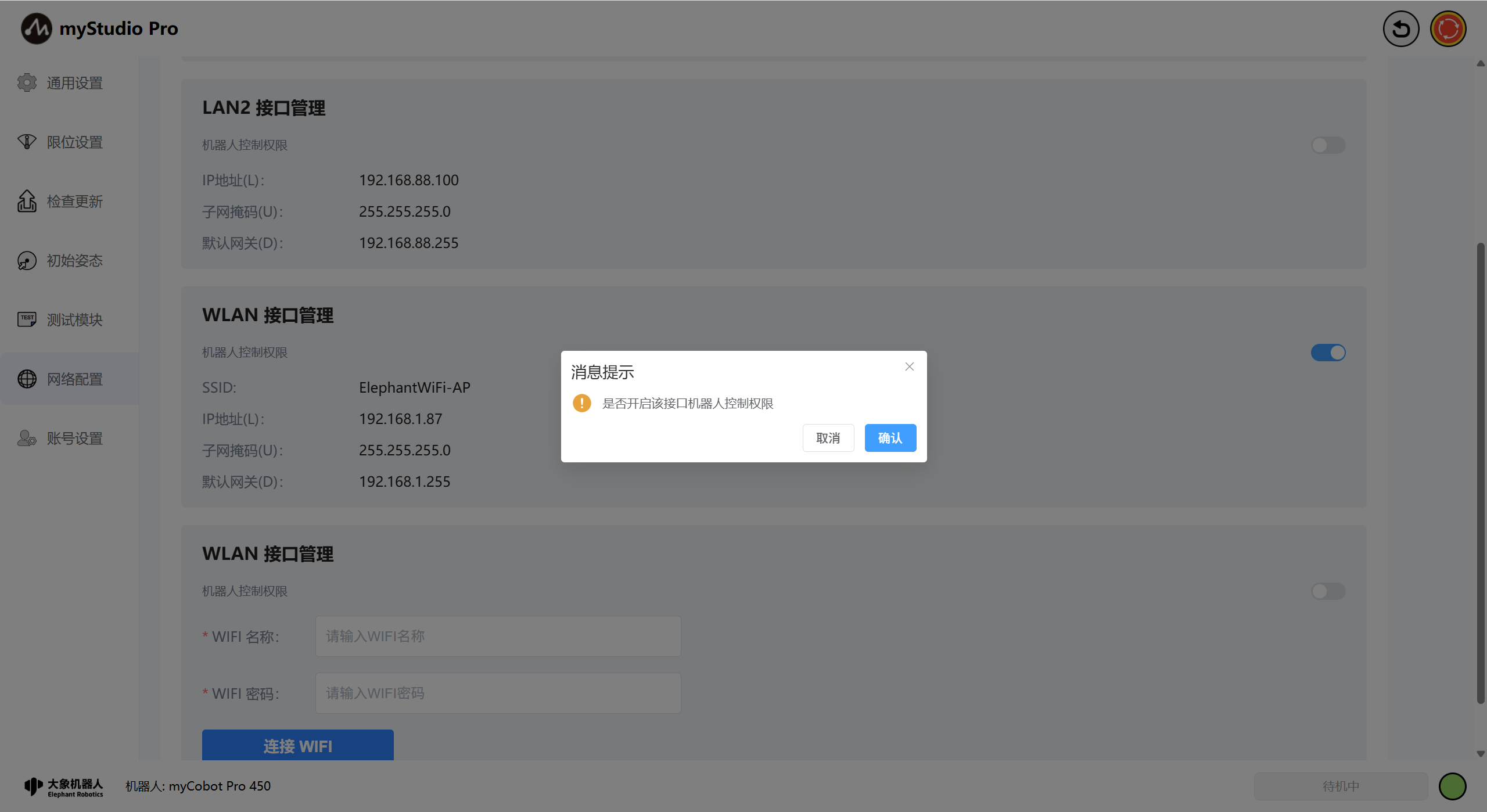
7 网络配置
点击 网络配置 图标按钮,将进入网络配置页面,该页面主要展示机械臂网口信息,包括LAN1、LAN2和WLAN。
注意:页面内容是实时展示的,当且仅当网口被使用时才会显示对应的网口信息。
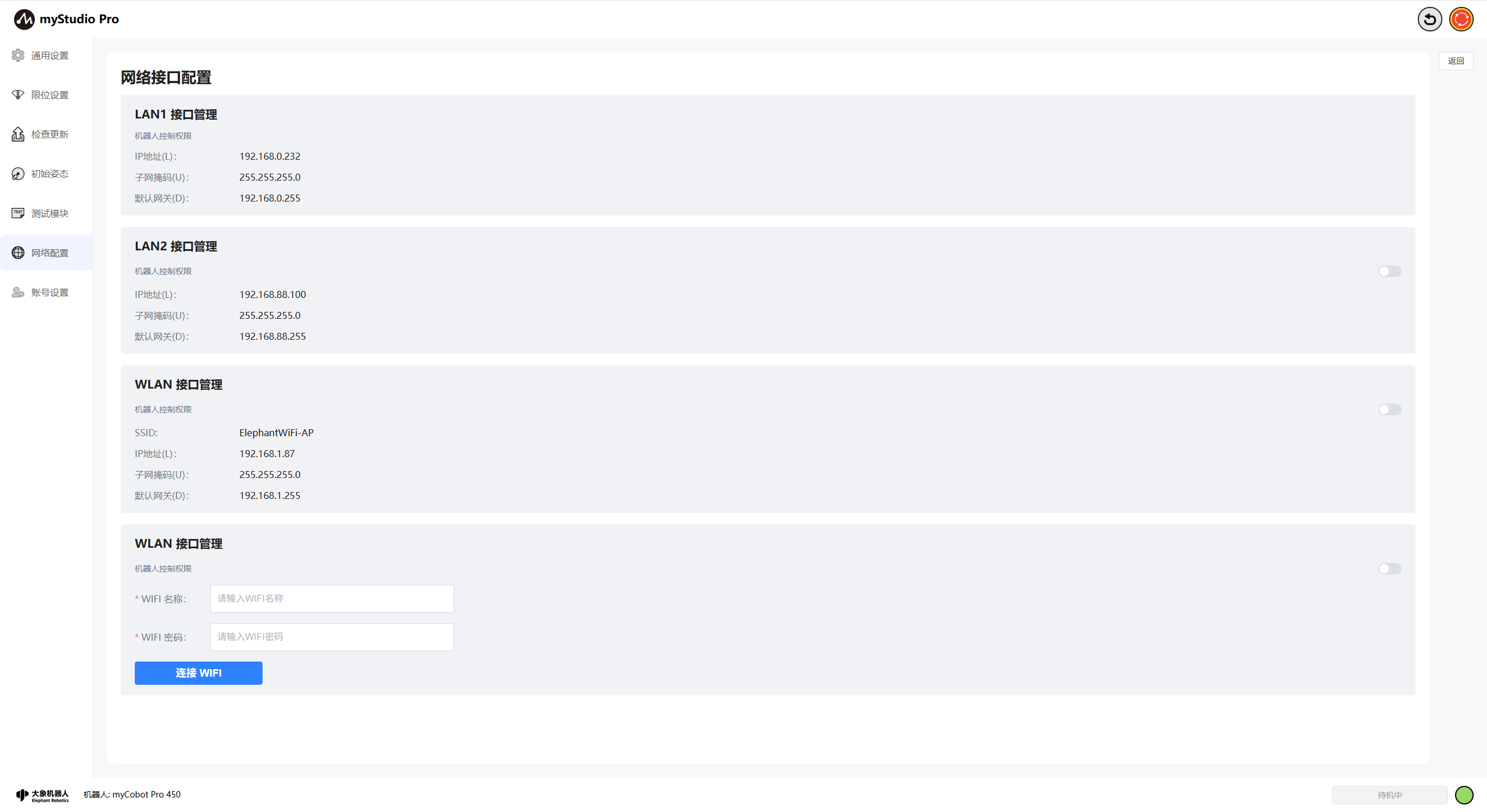
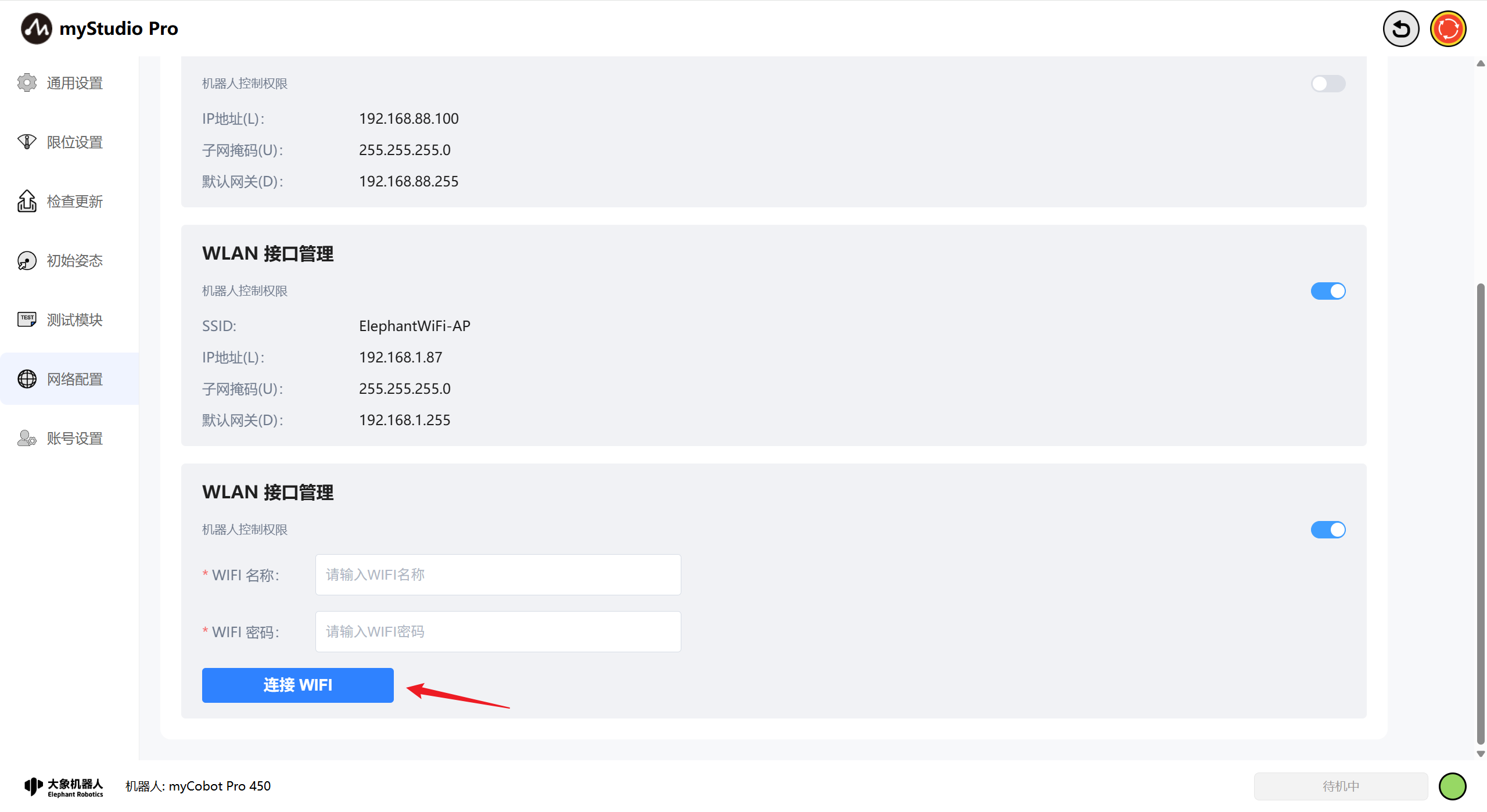
同时,可以在该页面进行WiFi连接操作,输入您要连接的WiFi账号和密码点击连接WIFI按钮即可连接WiFi。
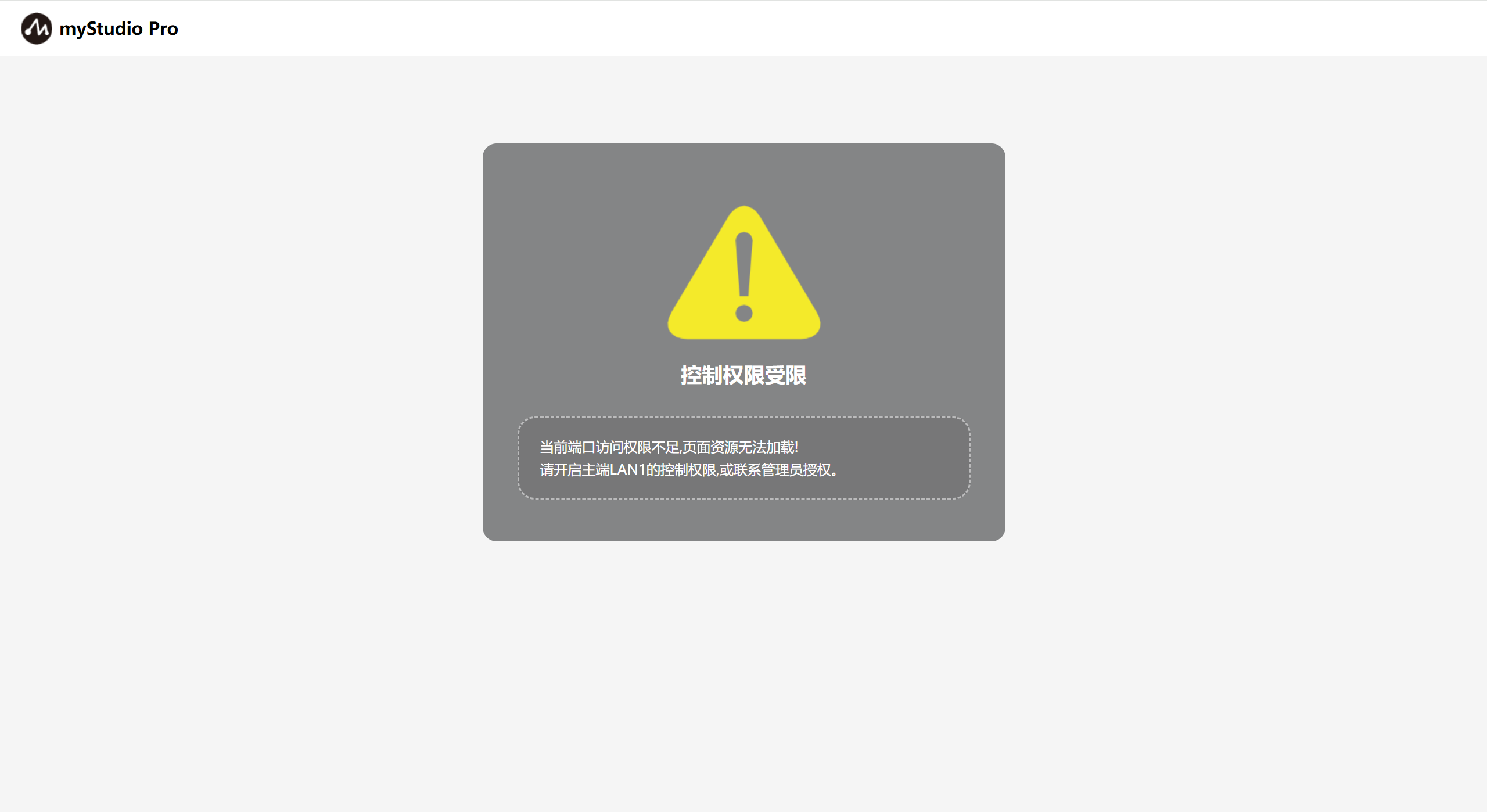
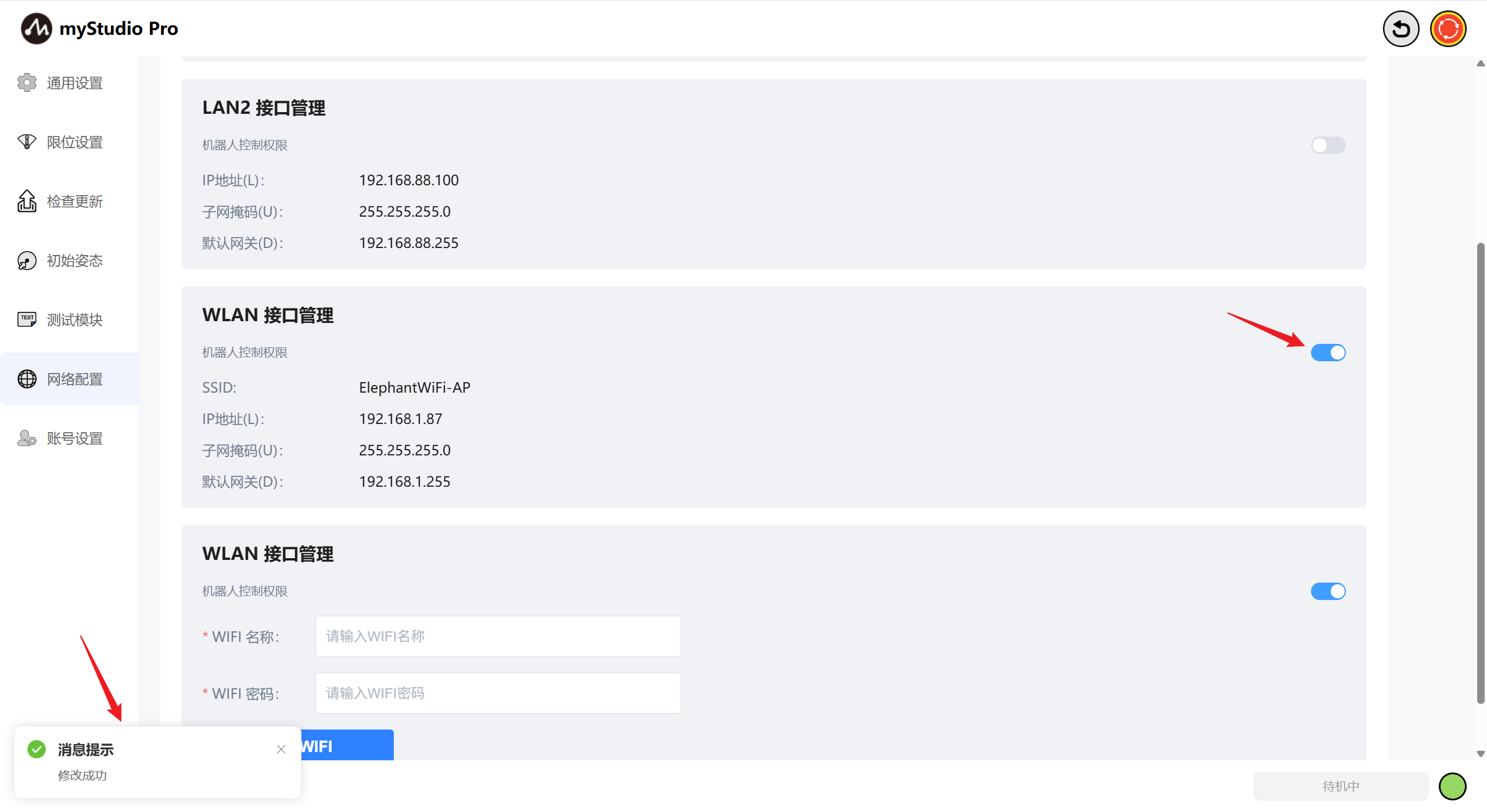
此外,在该页面可以对该网口的机器人控制权限进行修改,当机器人控制权限未开启,访问myStudio Pro时会显示没有控制权限。当且仅当控制权限被打开才能正常使用myStudio Pro。
以下基于WLAN网口对该页面功能进行说明,LAN2网口控制逻辑同理。
浏览器中,输入WLAN网口的IP地址访问myStudio Pro(已连接WIFI & 未开启控制权限)。
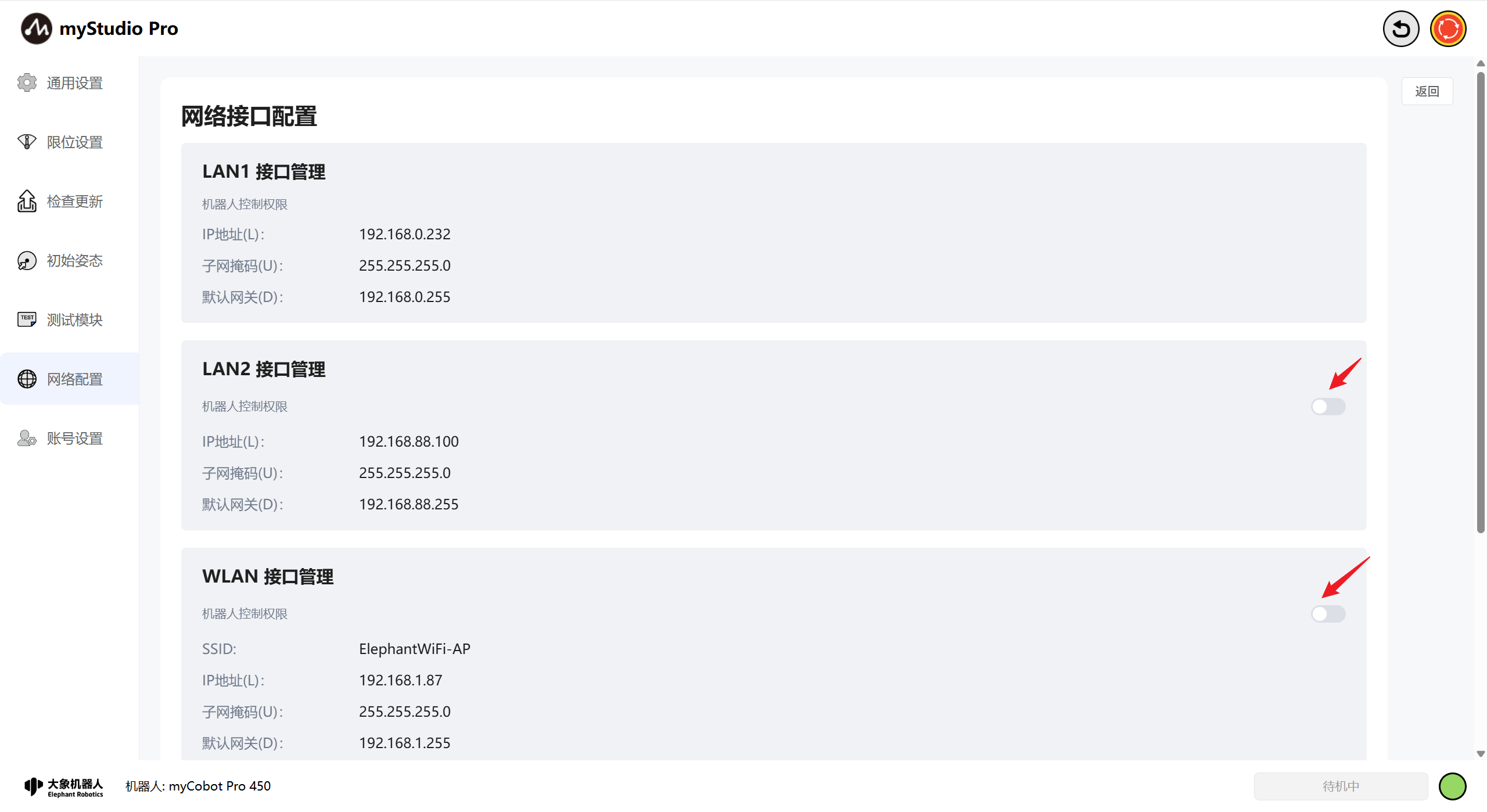
对控制权限开启/关闭时会对该操作进行二次确认,点击确认后,即可成功开启/关闭控制权限。
浏览器中,输入WLAN网口的IP地址访问myStudio Pro(已连接WIFI & 开启控制权限)。此时会先进入账号登陆页面,输入正确的账号名和密码后,即可正常使用myStudio Pro,默认账号和密码是admin、123,倘若您修改了账号密码(修改方式详见第8点说明),请使用修改后的账号密码登陆,否则无法正常使用myStudio Pro。

成功登陆后会对先检测是否有网口正在使用myStudio Pro,有则进行二次登陆确认,点击确认后,正在使用的网口将自动下线,即可正常使用myStudio Pro。点击取消则返回登陆页。反之,则直接进入myStudio Pro主界面。

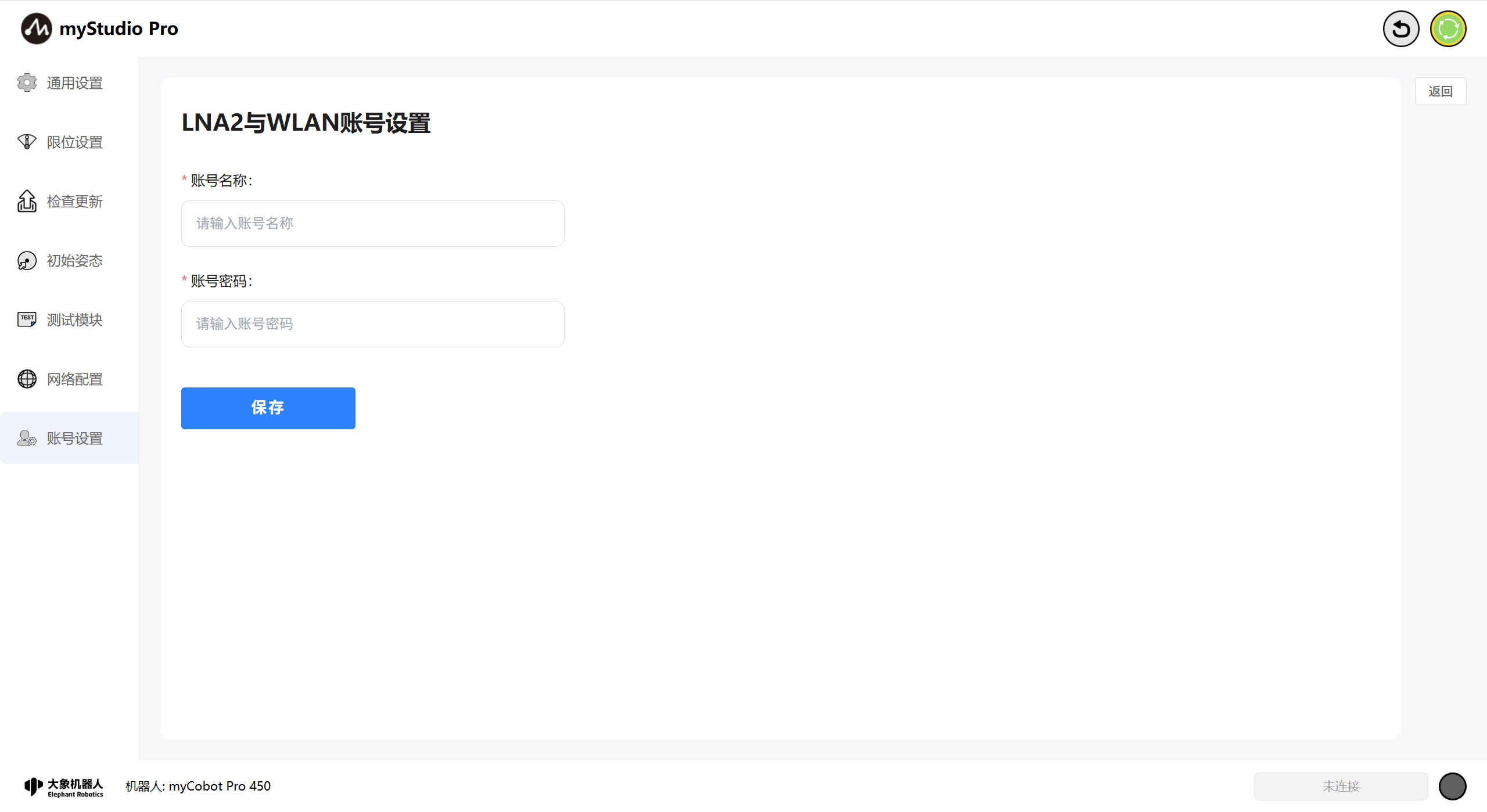
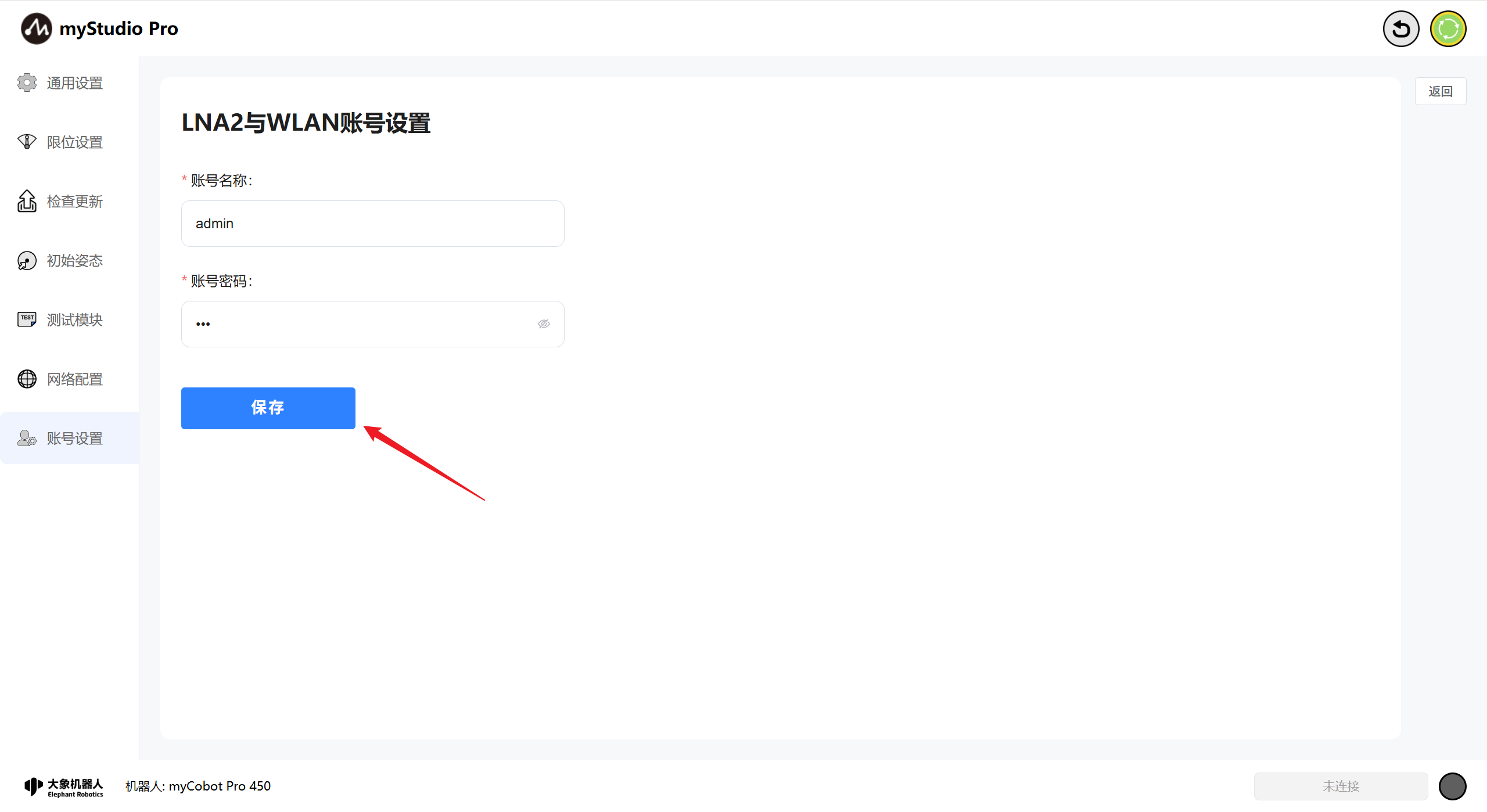
8 账号设置
点击账号设置图标按钮,将进入账号设置页面。该页面主要用于设置使用LAN2或者WLAN网口登陆myStudio Pro时的账号名和密码。当账号名和密码保存成功时,下次登陆myStudio Pro时,将使用该账号名和密码进行登陆,否则将无法正常使用myStudio Pro。
9 Dynamics
点击Dynamics图标按钮,将进入Dynamics页面。该页面主要用于设置动力学参数包括力矩补偿系数和碰撞阈值参数,同时可进行轨迹预览和标定功能,可优化本体动力学参数,以提升运动控制精度与碰撞检测准确性的过程。

9.1 动力学参数控制
参数锁定 按钮默认处于锁定状态,按钮颜色为蓝色,同时保存和重置按钮处于置灰且禁用状态,代表不能修改动力学参数。

当处于参数锁定状态时,点击 参数锁定 按钮,按钮颜色变成灰色,此时处于开锁状态,代表可以修改动力学参数,且保存和重置按钮恢复可用。
力矩补偿系数默认值0%(0-50%):设置力矩环的摩擦力补偿系统,系数越大越容易拖动。
碰撞阈值默认值100%(50-250%)。设置关节的碰撞阈值,数值越小越容易触发碰撞。
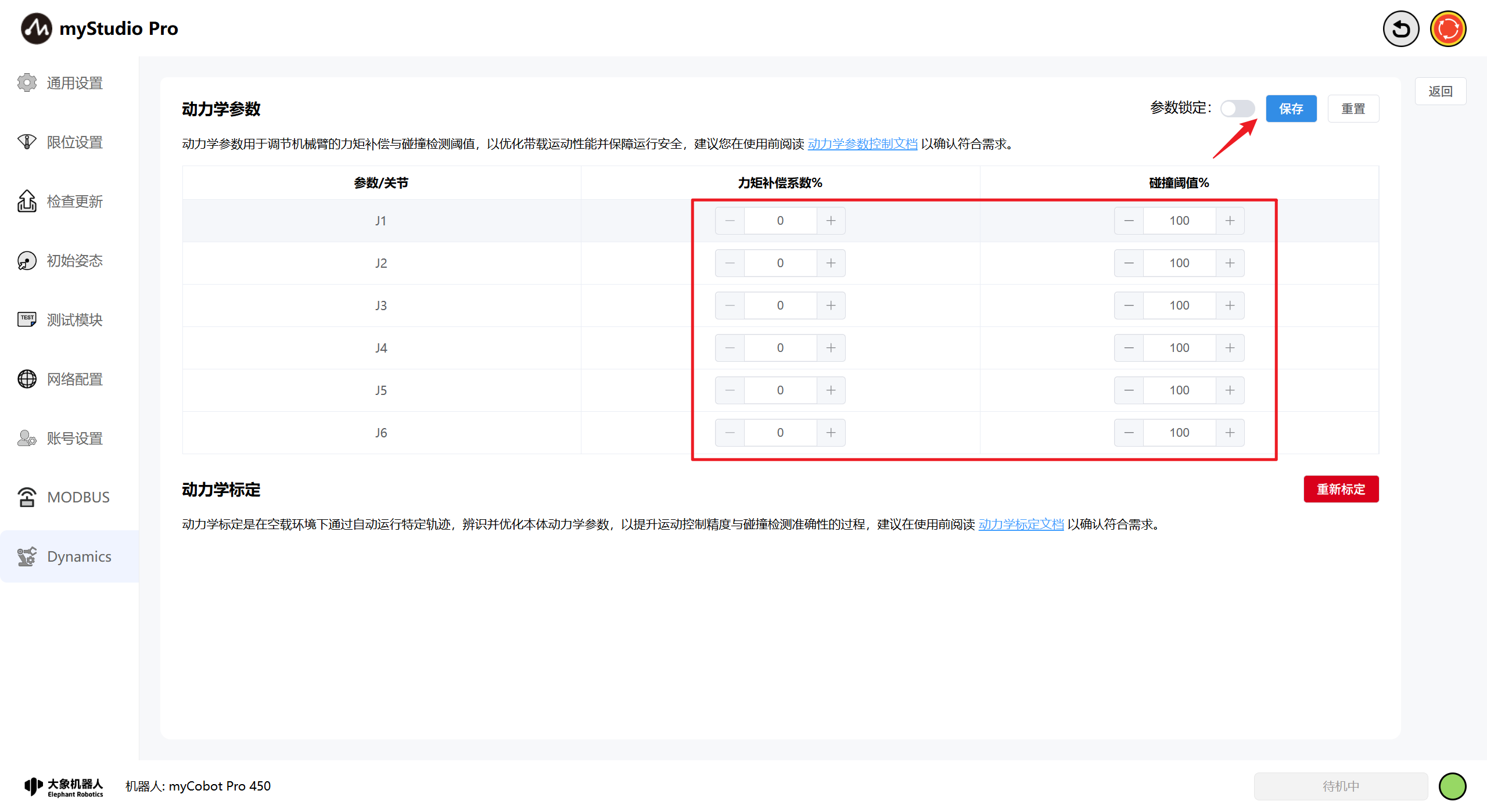
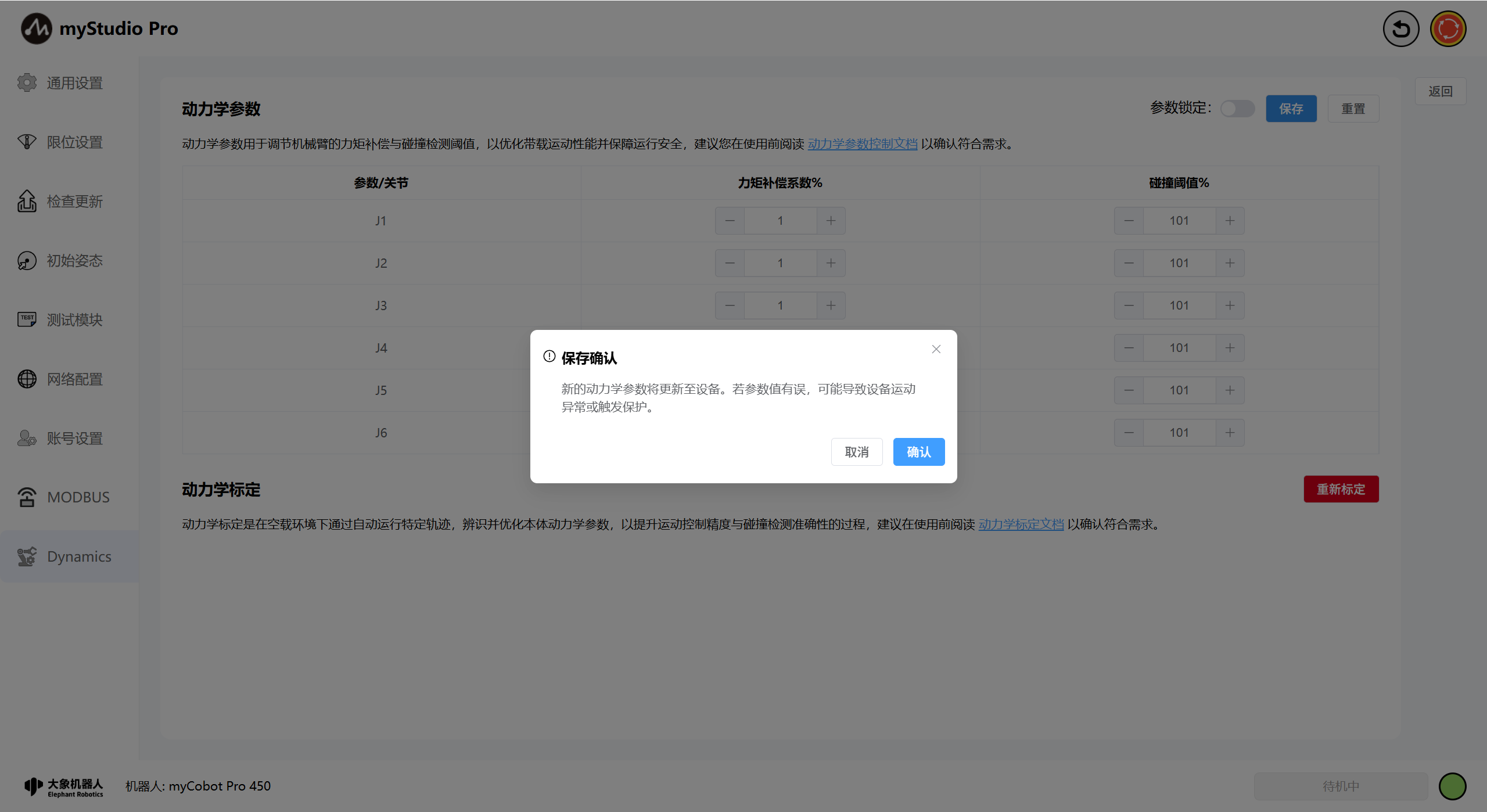
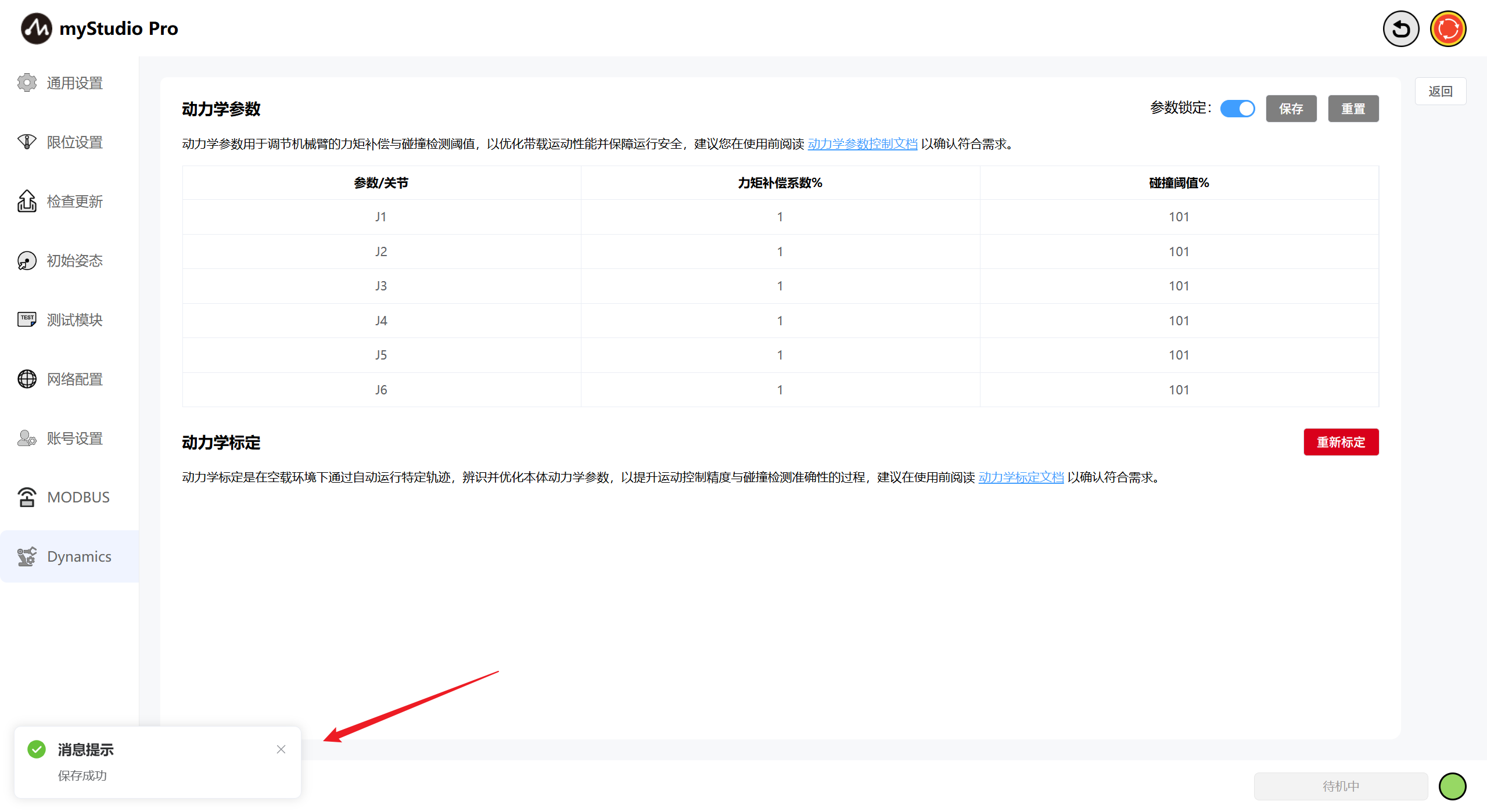
点击 保存 按钮,会将当前修改的力矩补偿系数和碰撞阈值进行保存,设置成功后页面会有消息提示,同时会自动将参数锁定。
点击重置按钮,将所有力矩补偿系数和碰撞阈值恢复至默认设置。点击时提示是否恢复默认设置。
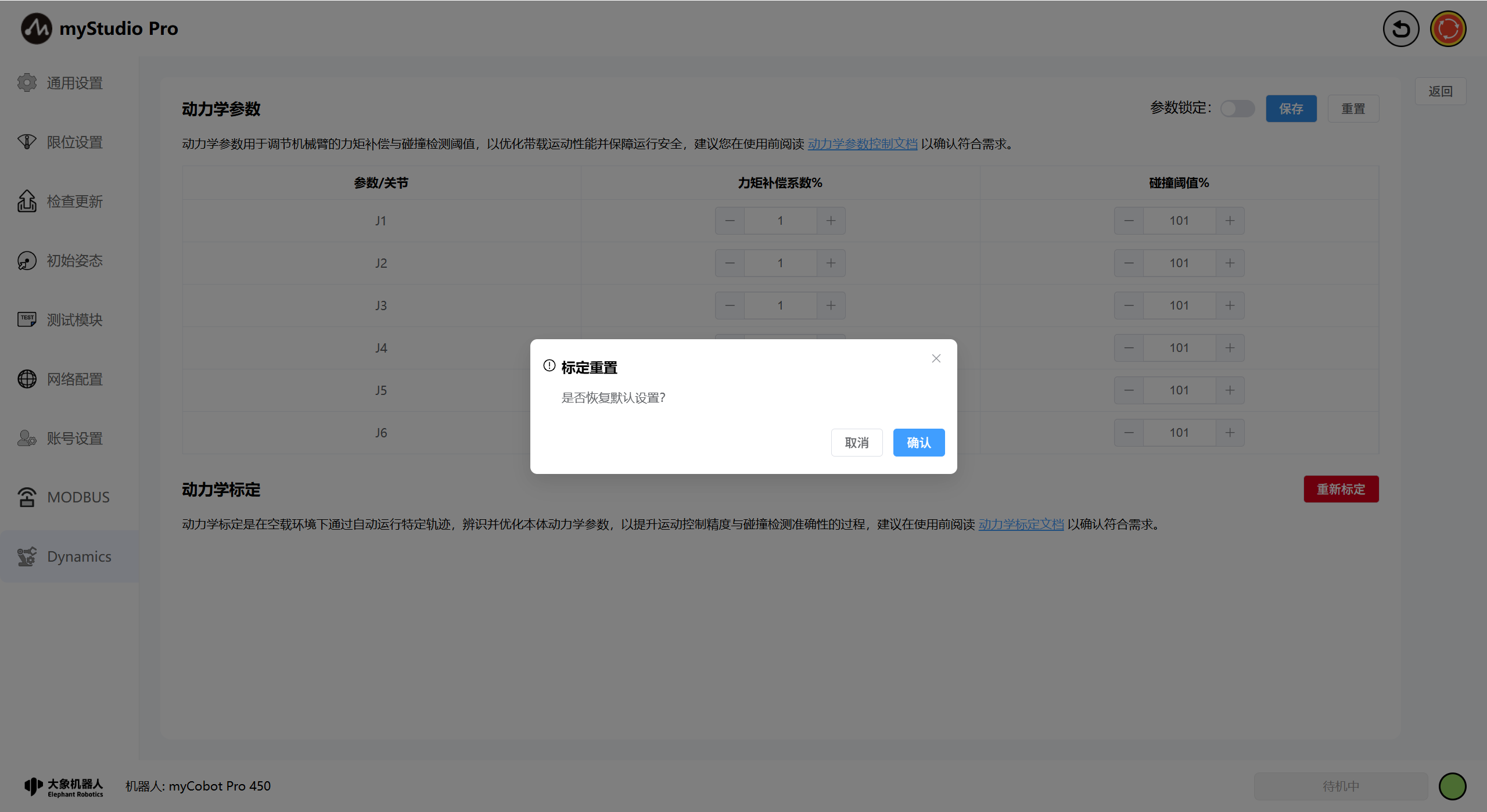
点击确认时,则会提示设置是否成功消息。

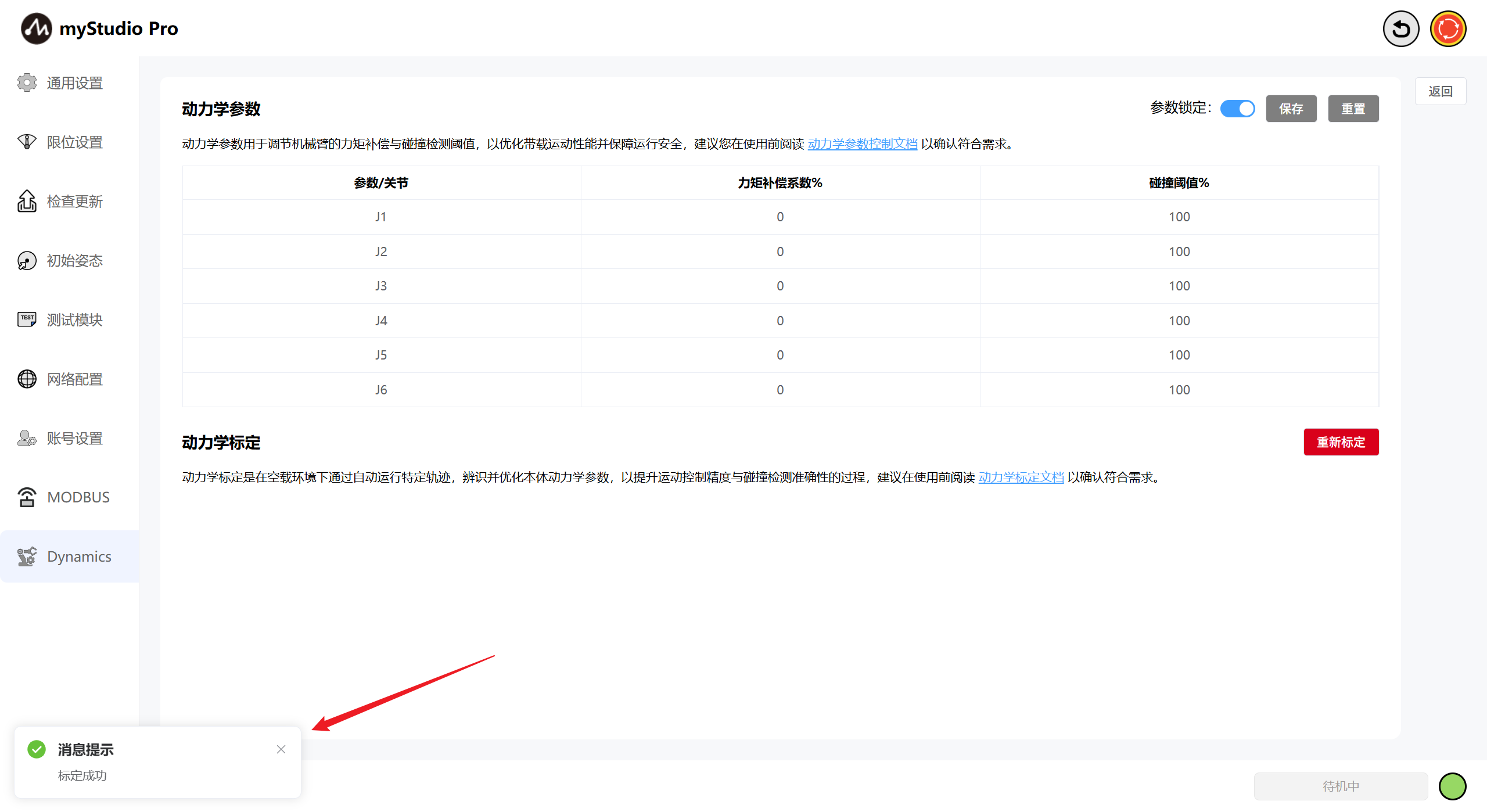
9.2 动力学标定
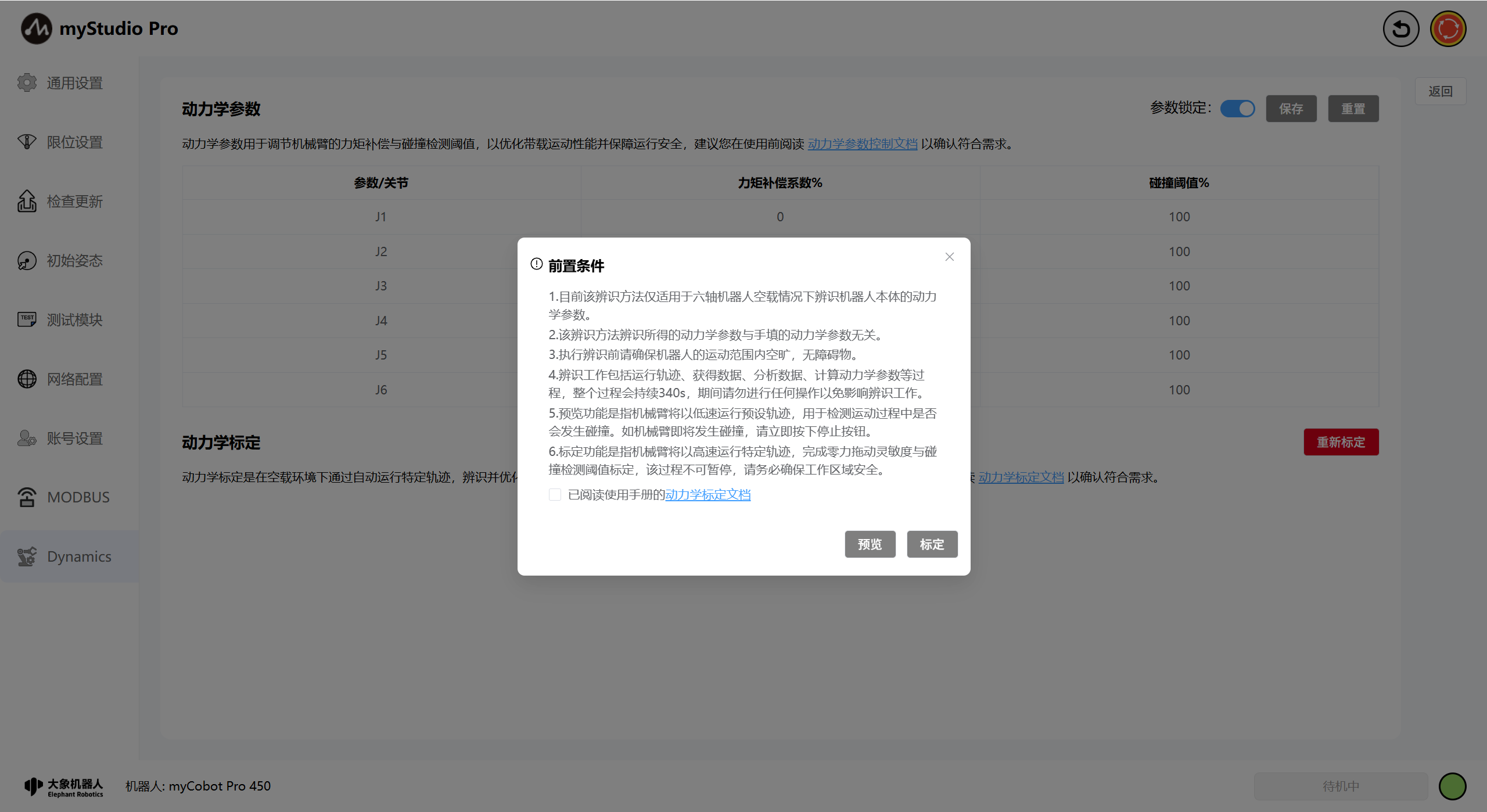
点击重新标定按钮将打开前置条件模态窗,模态窗中展示了标定前的前置条件,标定前前请您仔细阅读条件内容,是否符合条件再进行预览或标定操作。

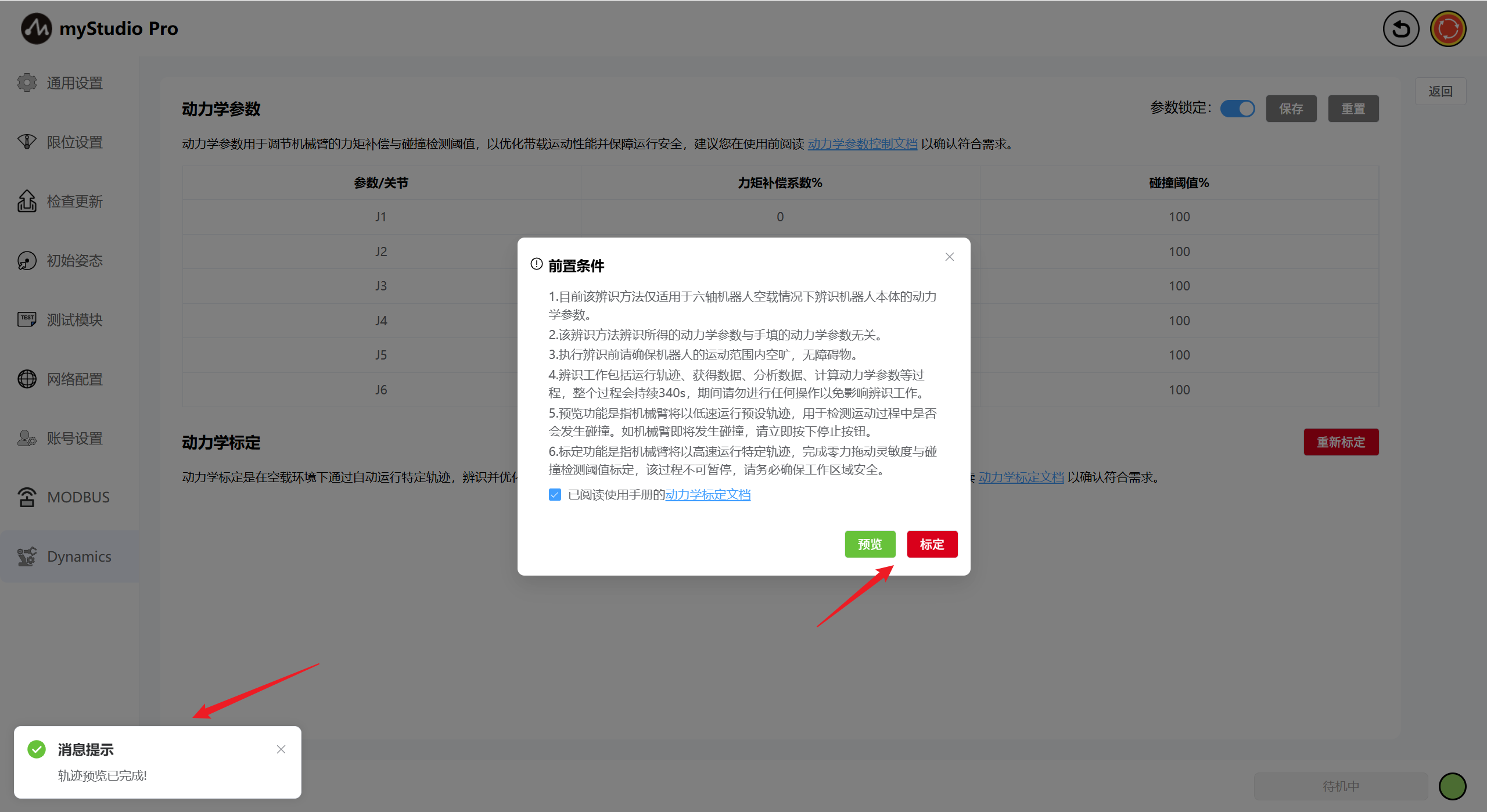
预览按钮和标定按钮默认为禁用不可点击状态,当且仅当阅读完毕并勾选复选框时预览按钮为蓝色可用状态。
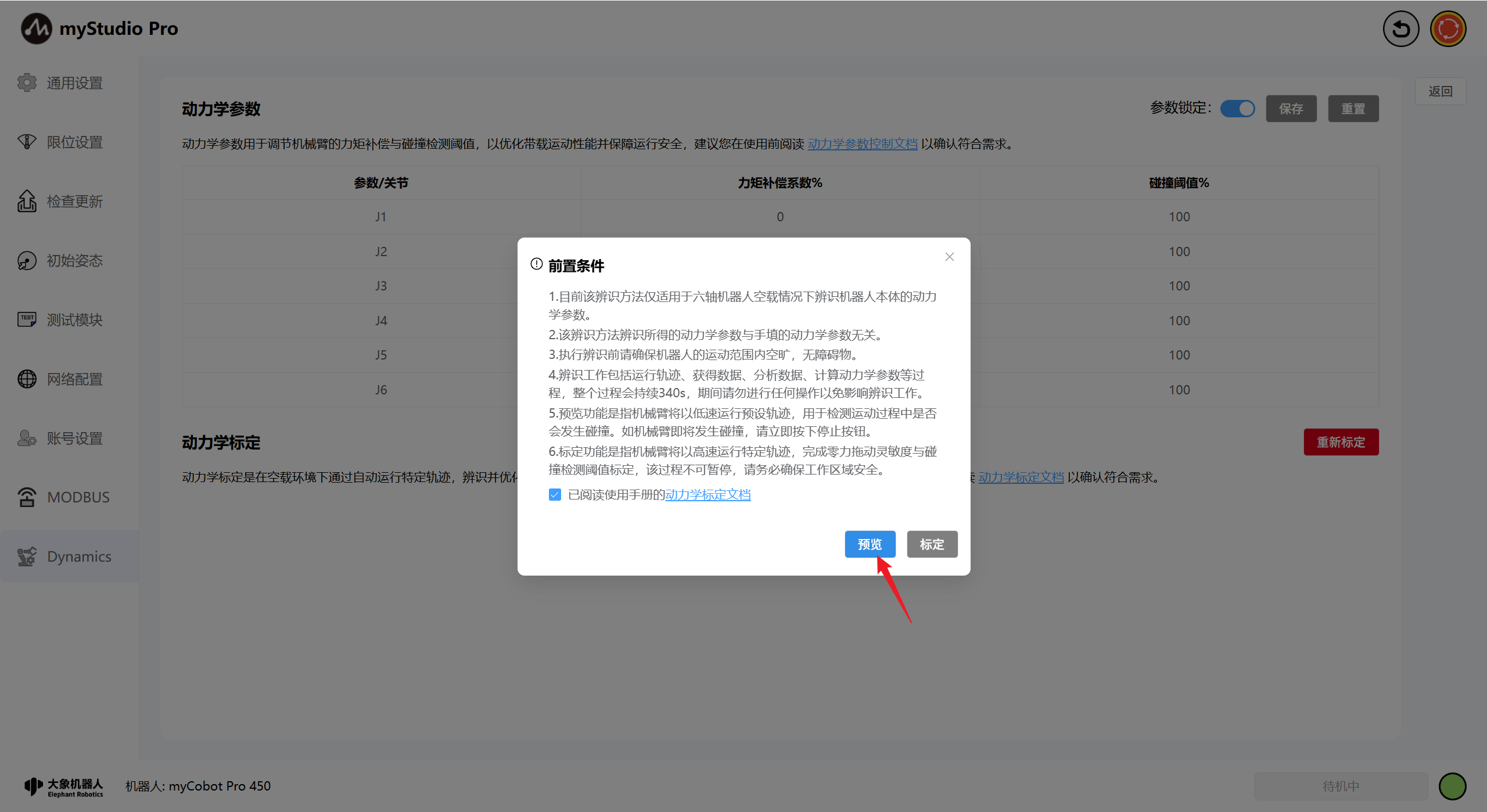
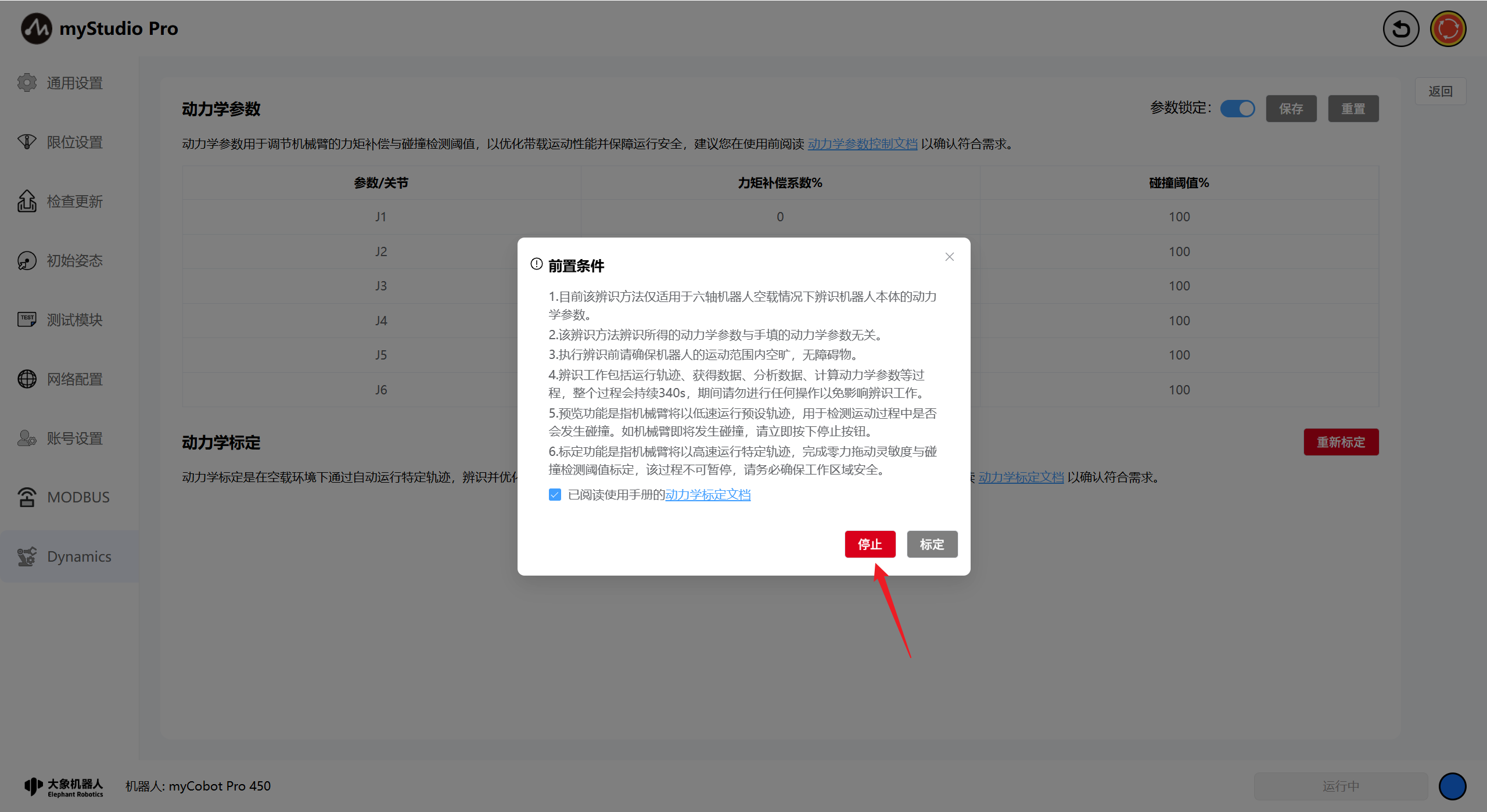
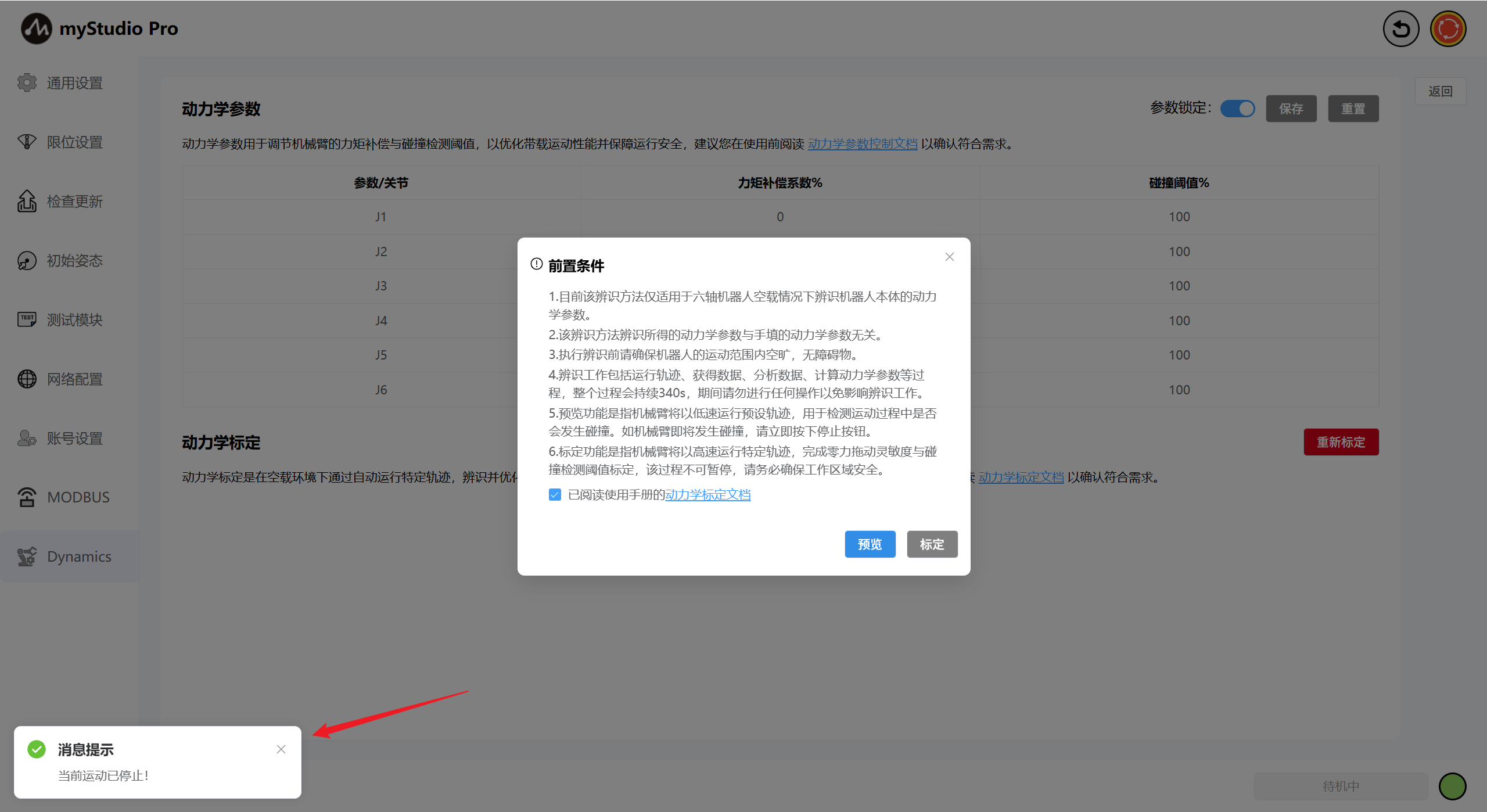
点击按钮,机械臂将进行轨迹预览运动。预览过程中,可进行停止操作,点击红色的停止按钮会展示停止确认窗。
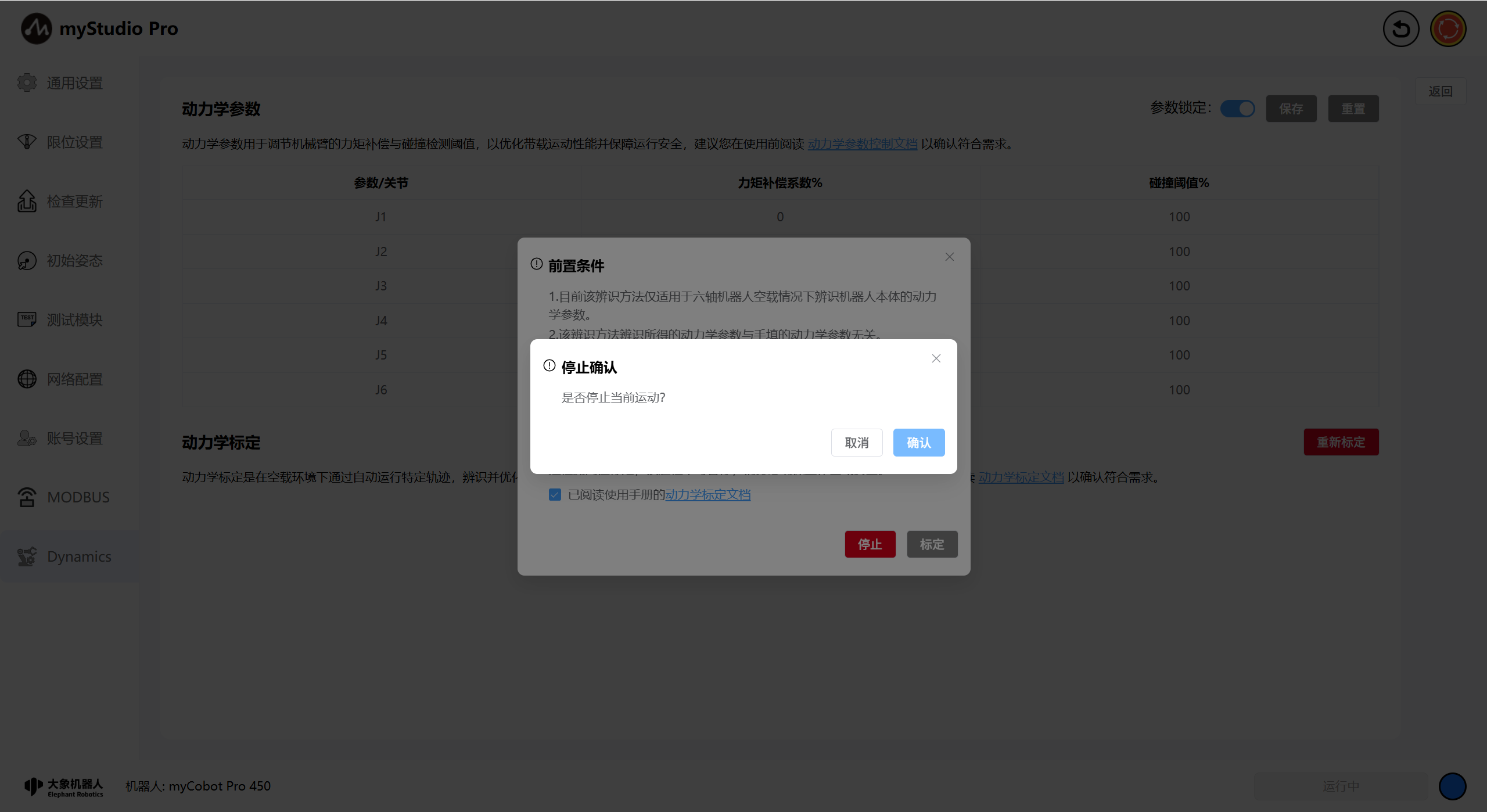
点击确认按钮即可进行运动停止,停止成功页面会显示对应的提示消息。
当预览成功完成后,停止按钮消失,预览按钮显示为绿色,标定按钮可用。
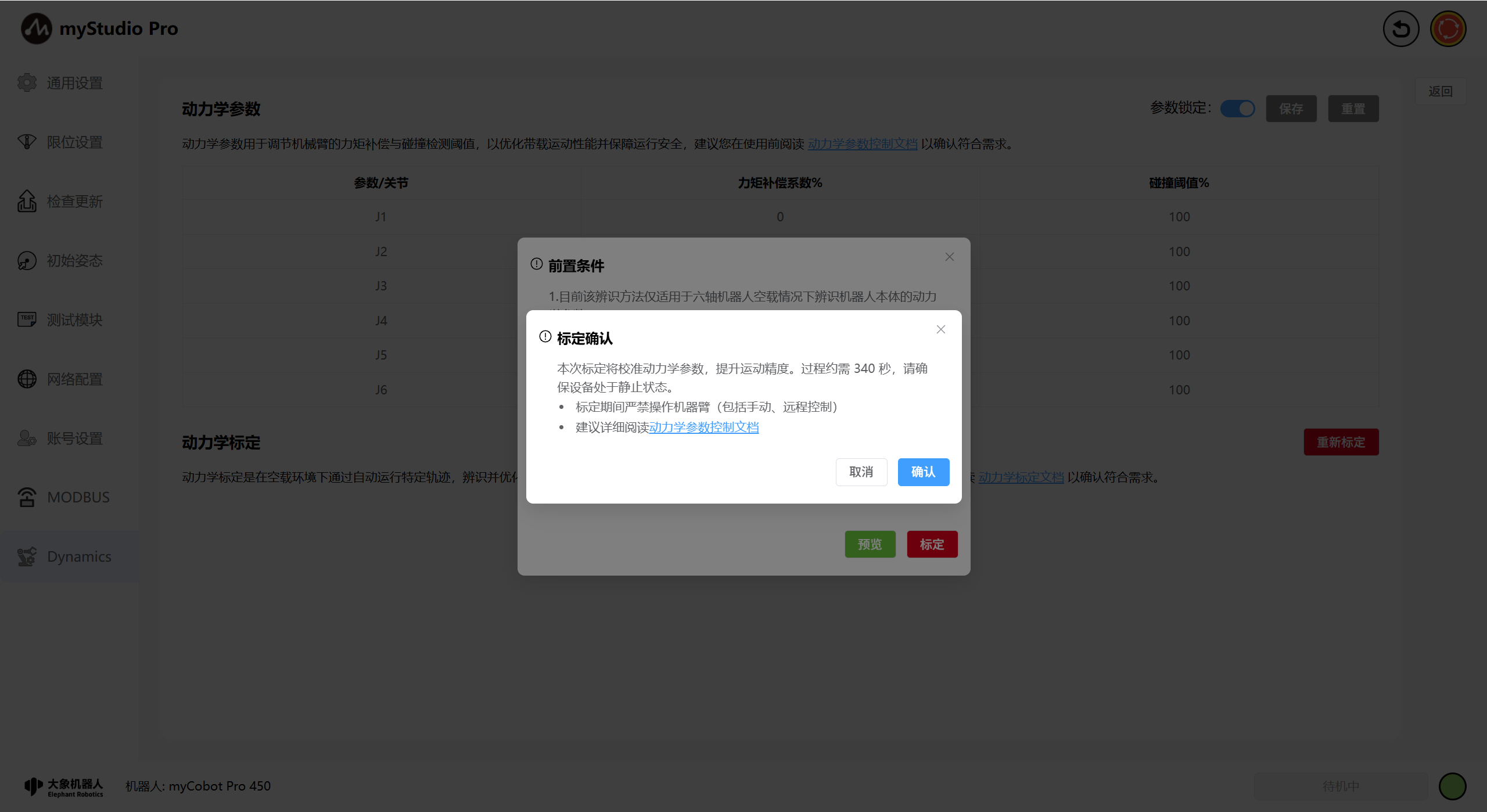
点击标定按钮,会展示标定确认弹窗,点击确认按钮后,页面将开启标定倒计时(340s)进行标定操作,标定期间请您耐心等待。
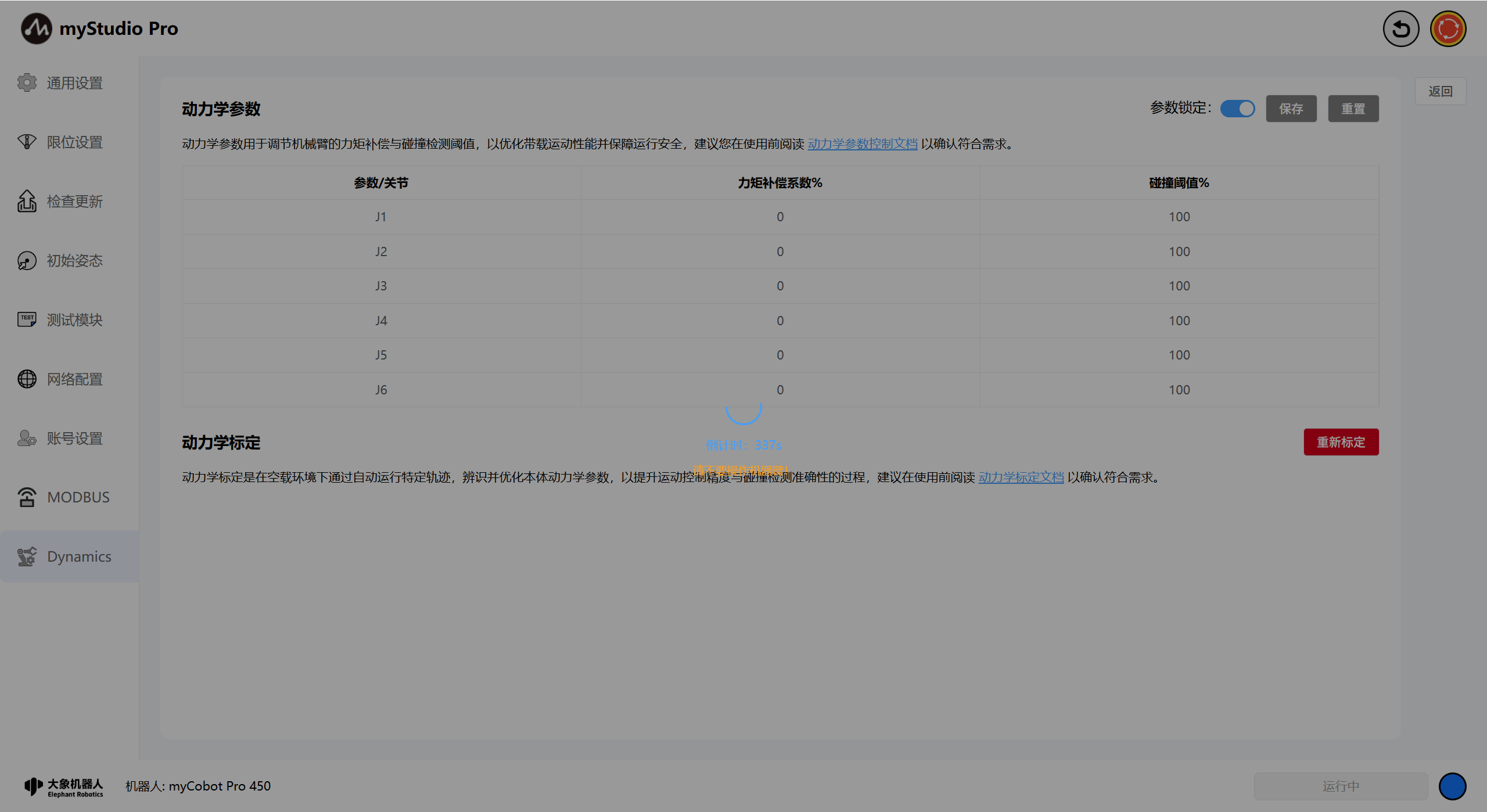
标定成功后将展示对应的提示信息,此时表示已完成标定流程。