首次使用
MiniRobot是一个由TFT屏幕以及按键组成的交互式模块,底部的按键从左至右依次为A、B、C、D键,可通过按键切换显示不同的机械臂信息同时也可通过按键控制机械臂状态。
启动MiniRobot前,需要先将机械臂通电,并接入急停按钮后才可正常使用。 机械臂通电后,若此时后端没有启动时,MiniRobot会默认将当前所有数据显示为0,包括角度,坐标,IP。机械臂通电后大约10sMiniRobot会自动更新当前数据。
在机械臂上电后,MiniRobot会先显示Logo。
![]()
随后进入主界面,主界面默认显示当前机械臂的关节信息以及静态IP信息。
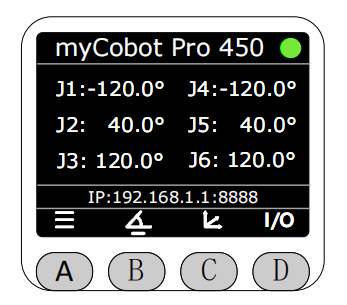
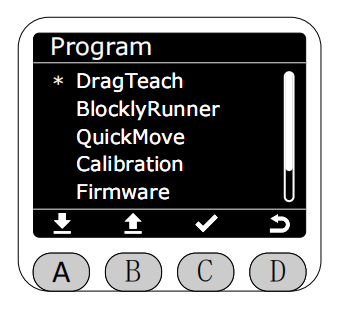
按下A键,可进入菜单界面,通过屏幕底部的图标指引可上下选择具体的功能,需要注意若在该界面30s内没有任何操作则会自动跳转回主界面。
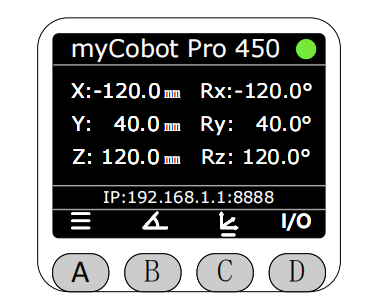
可以通过屏幕底部的按键切换显示不同的机械臂信息,按下C键显示机械臂当前的坐标信息以及静态IP信息。
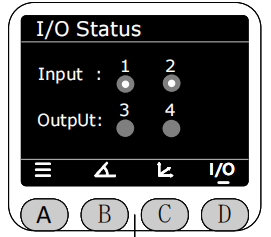
按下D键显示当前末端M8接口的输入输出状态,没有小点的为低电平,白点为高电平。
需要注意,MiniRobot、myStudio Pro与Python接口对机械臂的运动控制具有互斥性。同一时刻下只能有一端可以控制机械臂。若MiniRobot进入了控制界面,则myStudio Pro或Python接口将无法控制机械臂,反之同理。
当进入如下界面时会认定为进入了控制界面:
1、拖动示教界面及其子页面。
2、BlocklyRunner界面及其子界面。
3、快速移动界面及其子界面。
4、零位校准界面及其子界面。
5、设置界面及其子界面。
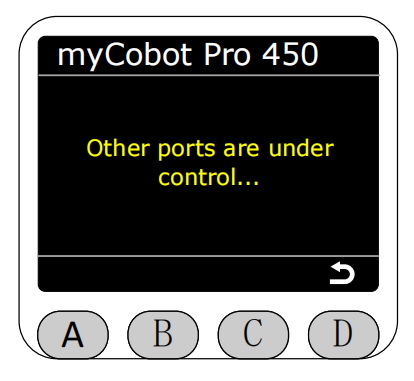
当其他端在控制机械臂时,屏幕会弹窗提示“Other ports are under control...”,提示三秒自动退出弹窗。
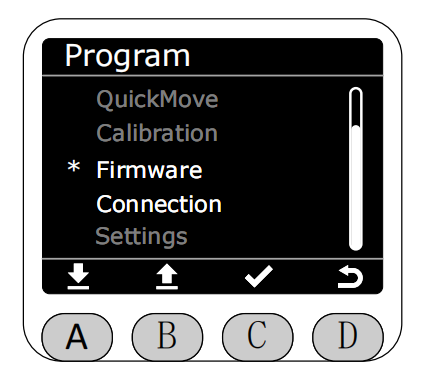
此时进入菜单页面,只有“Firmware”和“Connection”可进入操作,其他选项置灰不可选。
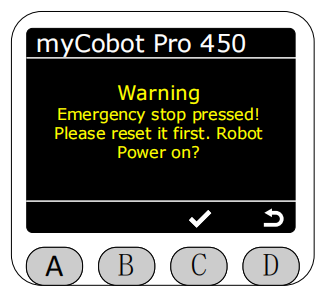
当按下急停按钮,会有弹窗提示急停按下是否需要重新上电,注意:选择上电之前需打开急停,否则上电无法成功
急停按下弹窗提示,按下C键执行上电操作。
上电过程弹窗提示。
上电完成弹窗提示。
上电失败弹窗提示。
上电超时没收到响应提示错误码“4-01-0”。
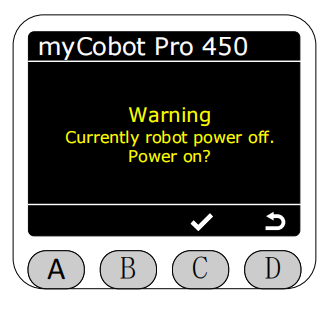
在机械臂下电状态,任意按钮操作都会提示先上电再操作机械臂,注意:选择上电之前需打开急停,否则上电无法成功
下电状态,按下任意按钮提示弹窗,按下C键执行上电操作(上电过程提示同上)。