Pro450系统镜像烧录说明
系统镜像版本说明
| 版本号 | 发布日期 | 更新内容 |
|---|---|---|
| v1.0.2025.12.30 | 2025年12月30日 | 新功能: 新增拖动示教文件 优化: 1. webapp 更新至v2.0.0 2. 主控固件件更新至v1.1.6 3. 更新wifi连接脚本,连接之后不关闭eth1的使用 4. 更新自启动脚本 |
| v1.0.2025.11.10 | 2025年11月10日 | 优化: 更新 WiFi 连接脚本,允许同时进行 WiFi 和 LAN 连接 |
| v1.0.2025.10.18 | 2025年10月18日 | 新功能: 1. 添加webapp v1.0.0、 主控固件MyCobotPro 2. 更改 WiFi 模块 3. 启用 GPIO 支持 4. 禁用 RK NPU 5. 禁用 SD 模块 6. 添加 wifi_hotspot_start 和 wifi_hotspot_stop 脚本 7. 配置 eth1 以支持 DHCP 8. 添加 /usr/bin/versions 文件以打印系统和固件版本 9. 添加 /etc/version 和 /etc/version_log 文件 10. 安装pymycobot v4.0.2版本 优化: 更新webapp程序、 更新主控固件MyCobotPro 修复: 修复 eth0 无法使用的问题(修复设备树中的 GPIO) |
注意: 系统镜像烧录完成之后,机械臂各关节需要重新校准零位才能正常使用,请查看 5.5-零位校准 章节内容。
本章节将指导您如何在 PC 端 使用烧录工具,将系统镜像正确烧录至 Pro450 主控设备。请严格按照步骤进行,确保烧录过程安全、顺利。
1 准备工作
在开始烧录之前,请确保以下硬件与软件准备齐全:
硬件需求
| 设备 | 数量 | 用途说明 |
|---|---|---|
| Windows PC | 1台 | 运行烧录工具和驱动安装 |
| 双头 USB 数据线 | 1条 | 连接 PC 与 Pro450 |
| Pro450 机器人 | 1台 | 待烧录设备 |
| 稳定电源 | 1套 | 为 Pro450 供电(保持通电) |
| 急停开关 | 1个 | 安全保护 |
| 网线 | 1条 | 连接机械臂与 PC |
软件需求
官方提供的 系统镜像文件
烧录工具(例如:RKDevTool_Release_v3.15,以实际为准)
对应的 USB 驱动程序(设备通常为 USB 转串口 Driver)
🔔 提示: 建议将所有工具放在同一个文件夹中,避免路径中出现中文或空格。
网络配置
- MyCobot Pro 450 默认 IP 地址:
192.168.0.232 - 默认端口号:
4500 - 注意:PC 端需要将本机网卡 IP 设置为 同一网段(例如
192.168.0.xxx,xxx为 2~254 之间的任意数,且不能与机械臂冲突)。 示例:
- 机械臂 IP:
192.168.0.232 - PC IP:
192.168.0.100 - 子网掩码:
255.255.255.0
- 机械臂 IP:
验证:完成网络配置后,可在 PC 终端执行以下命令,若能成功返回数据包,则说明网络连接正常:
ping 192.168.0.232
2 系统镜像下载
点击下载镜像:myCobot_Pro_450_buildroot_2025251230.img
3 安装 USB 驱动程序
点击下载驱动:DriverAssitant_v5.12.zip
驱动下载之后,解压并打开提供的
DriverAssitant_v5.12文件夹双击运行
DriverInstall.exe进行安装即可
4 安装烧录工具
点击下载烧录工具:RKDevTool_Release_v3.15.zip
驱动下载之后,解压并打开提供的
RKDevTool_Release_v3.15/RKDevTool_v3.15_for_window文件夹双击运行
RKDevTool.exe打开即可
5 连接 Pro450 设备
- 使用 双头 USB 数据线 将设备与 PC 相连

- 双头USB线一端连接电脑,另一端连接Pro450机器底座的
USB1接口(上面的USB口)

确保 Pro450 已通电并使用网线与电脑连接
PC电脑远程ssh登录Pro450系统执行烧录命令
6 启动系统升级功能
- 方式1: webapp(推荐使用)
- 方式2: SSH远程连接指令
6.1 使用webapp
6.1.1 启动webapp
打开浏览器,输入下面指令启动 myStudioPro:
http://192.168.0.232:8000/
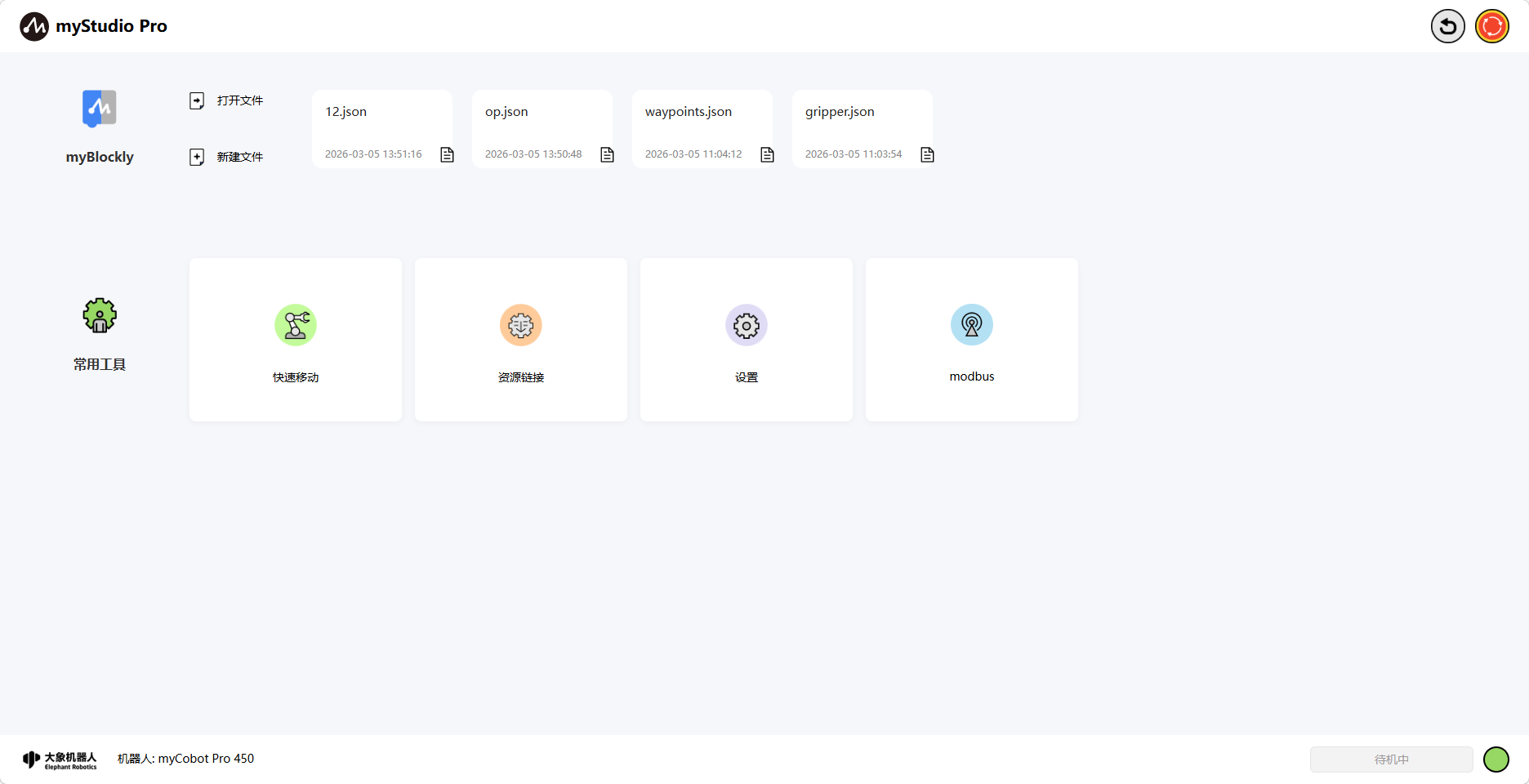
6.1.2 启动系统烧录功能
在界面点击 设置 ——>检查更新 页面中的 系统更新 模块,点击 手动升级 按钮即可。

6.2 使用SSH远程连接登录
6.2.1 SSH远程连接
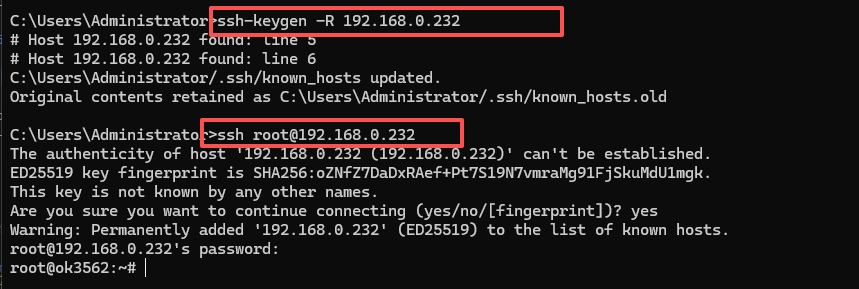
使用Win + R快捷键打开cmd面板,输入以下命令:
ssh-keygen -R 192.168.0.232
ssh root@192.168.0.232
按照提示输入yes, 然后再输入登陆密码root即可
6.2.2 SSH命令启动系统烧录功能
SSH远程连接登录之后,输入下面命令启动系统烧录功能:
reboot loader

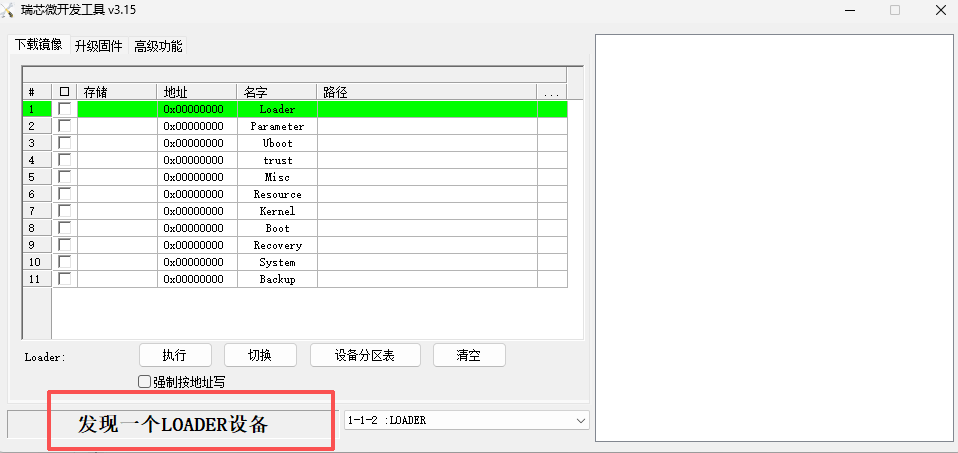
7 启动烧录工具
在步骤6 启动系统烧录功能之后,打开烧录工具将会看到如下图:
点击
升级固件按钮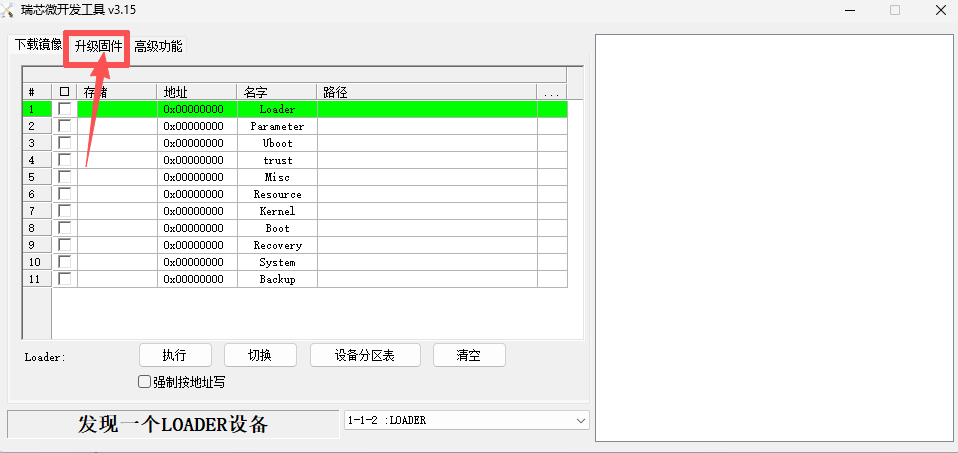
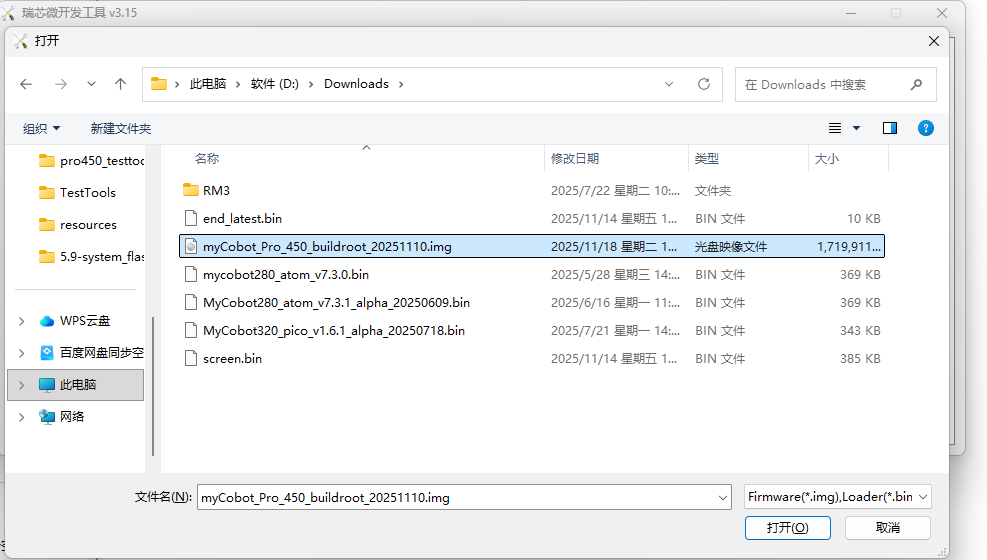
点击
固件按钮,打开文件资源管理器,选择烧录的系统镜像文件,然后点击打开。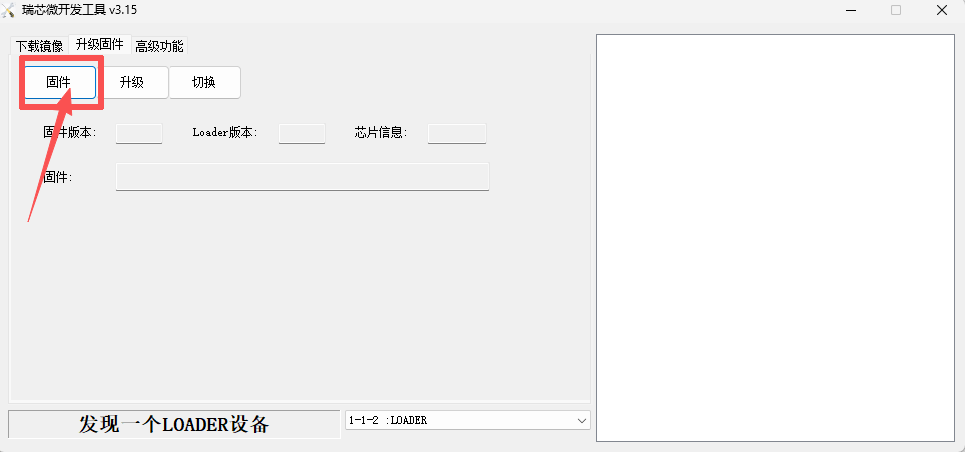
选择镜像文件之后,点击
升级按钮。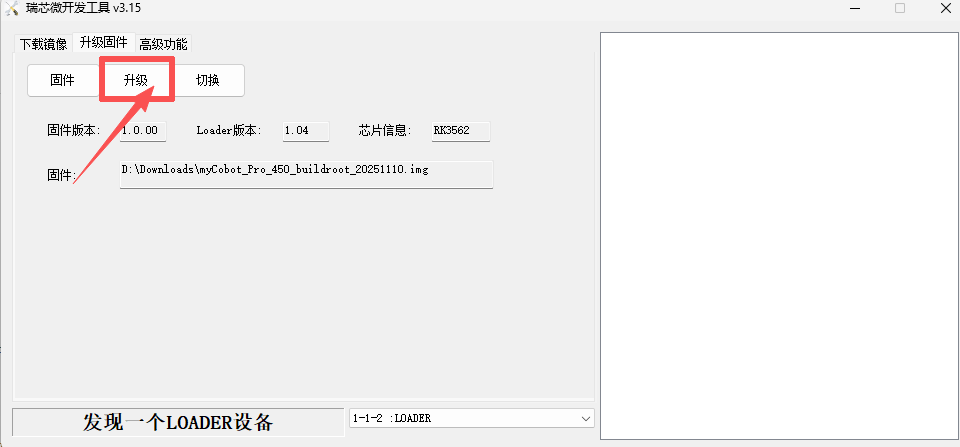
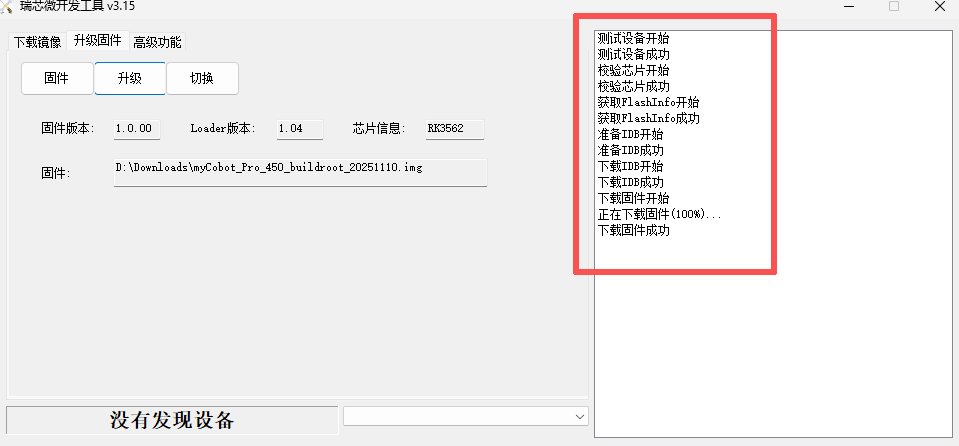
系统镜像烧录完成之后,烧录工具右侧将有提示信息:
8 验证系统镜像烧录
烧录系统镜像之后,重新使用SSH远程连接机械臂系统,输入下面命令查看系统版本号:
cat /etc/version

系统镜像文件名称与系统版本号关联,若输出的版本号与镜像文件的日期名称一致,代表系统镜像烧录成功。
注意: 系统镜像烧录完成之后,机械臂各关节需要重新校准零位才能正常使用,请查看 5.5-零位校准 章节内容。