myBlockly
myStudio Pro已配置到机器系统中,您可以使用PC电脑打开浏览器并通过ip:8000访问,首页加载完成后系统会自动与机器建立连接(默认静态ip:192.168.0.232:8000)。
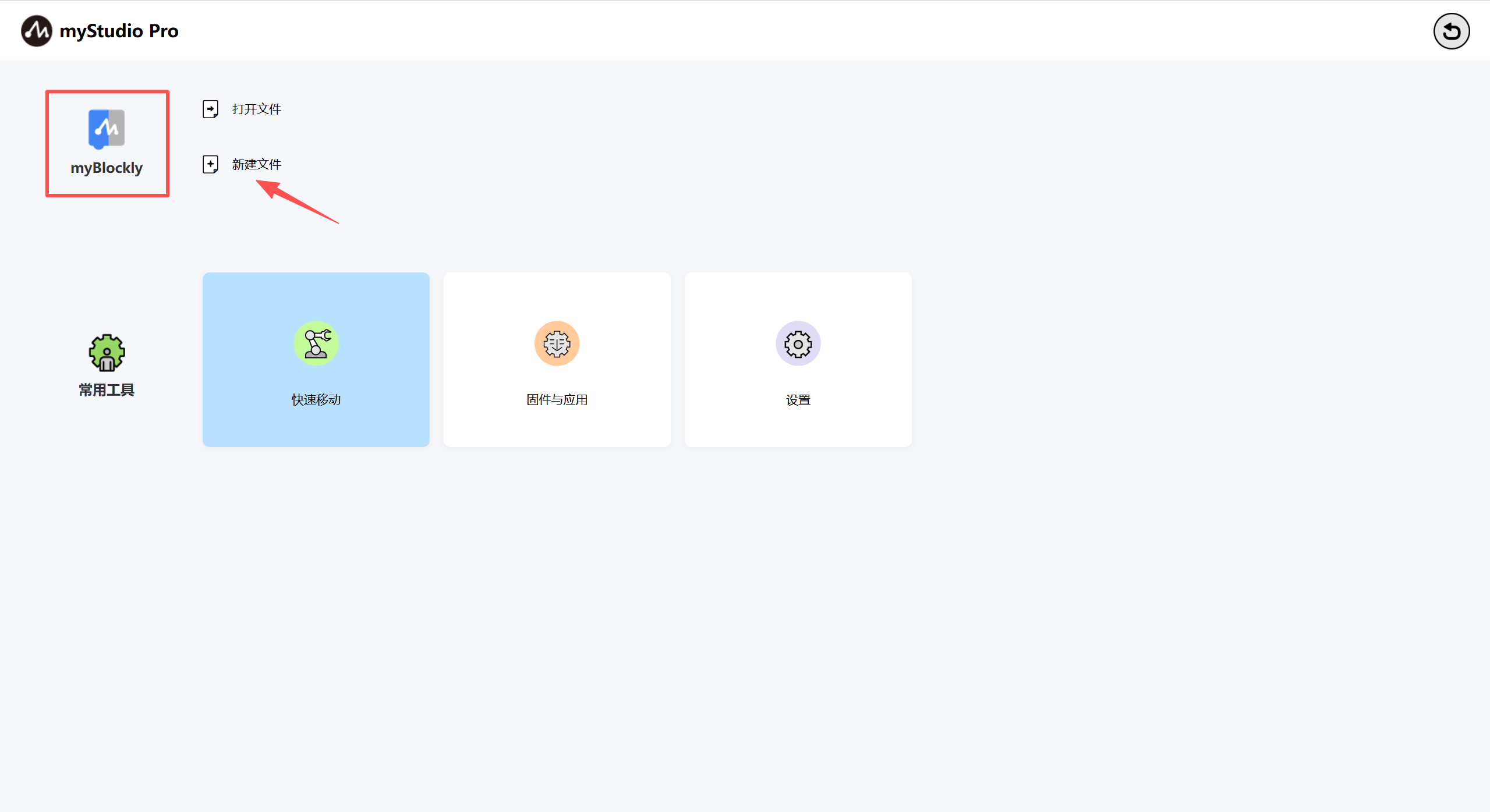
您可以点击myBlockly图标,或者点击新建文档按钮即可进入myBlockly编程页面
当然,如果您也可以通过选择点击
打开文件按钮会自动跳转到myBlockly页面,同时加载您保存好的文件内容包括工作区、路点、轨迹文件(关于如何保存工作区,请点这里)这里的通过点击
myBlockly图标和点击新建文档按钮进入myBlockly编程页面的操作相当于是新增工作区。
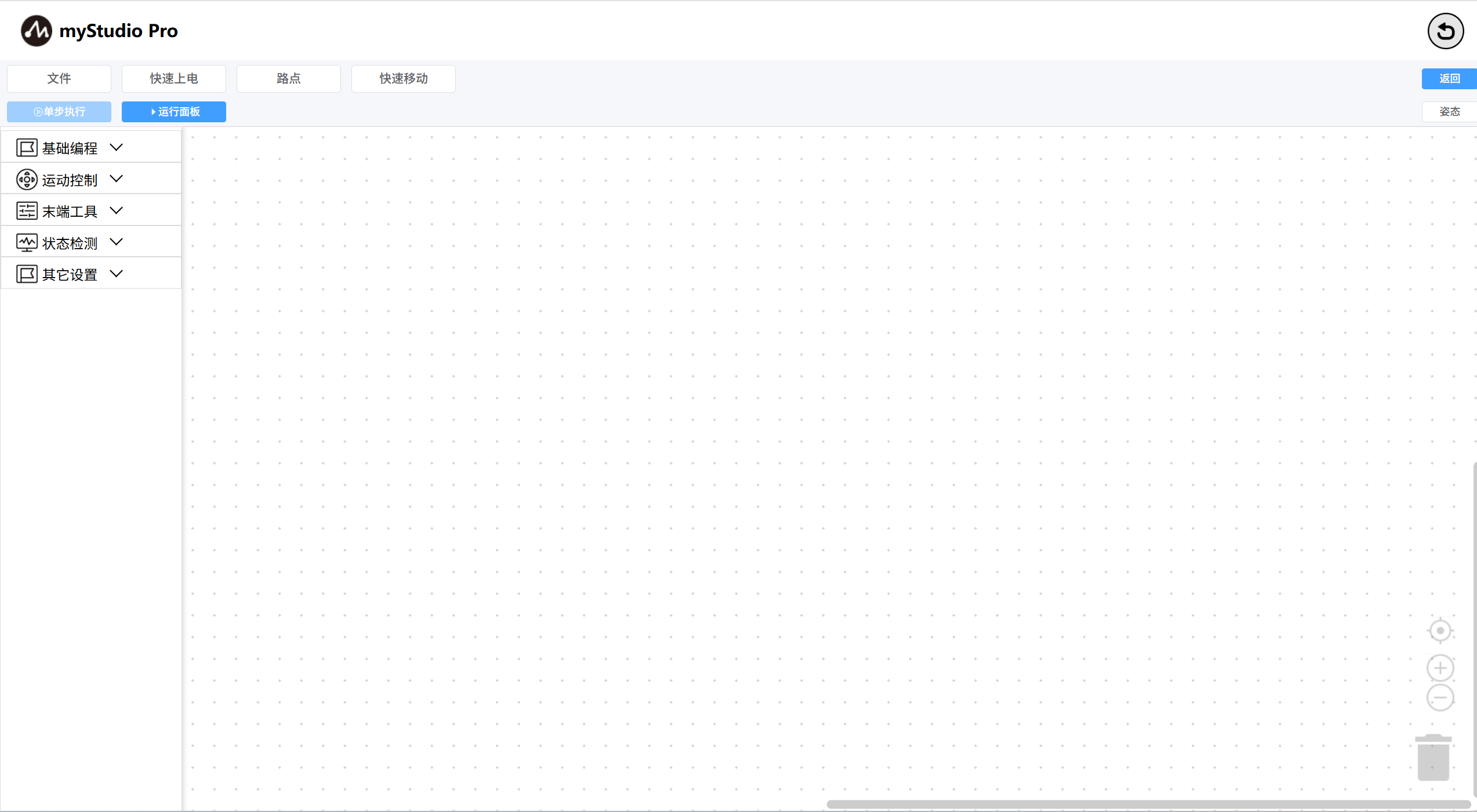
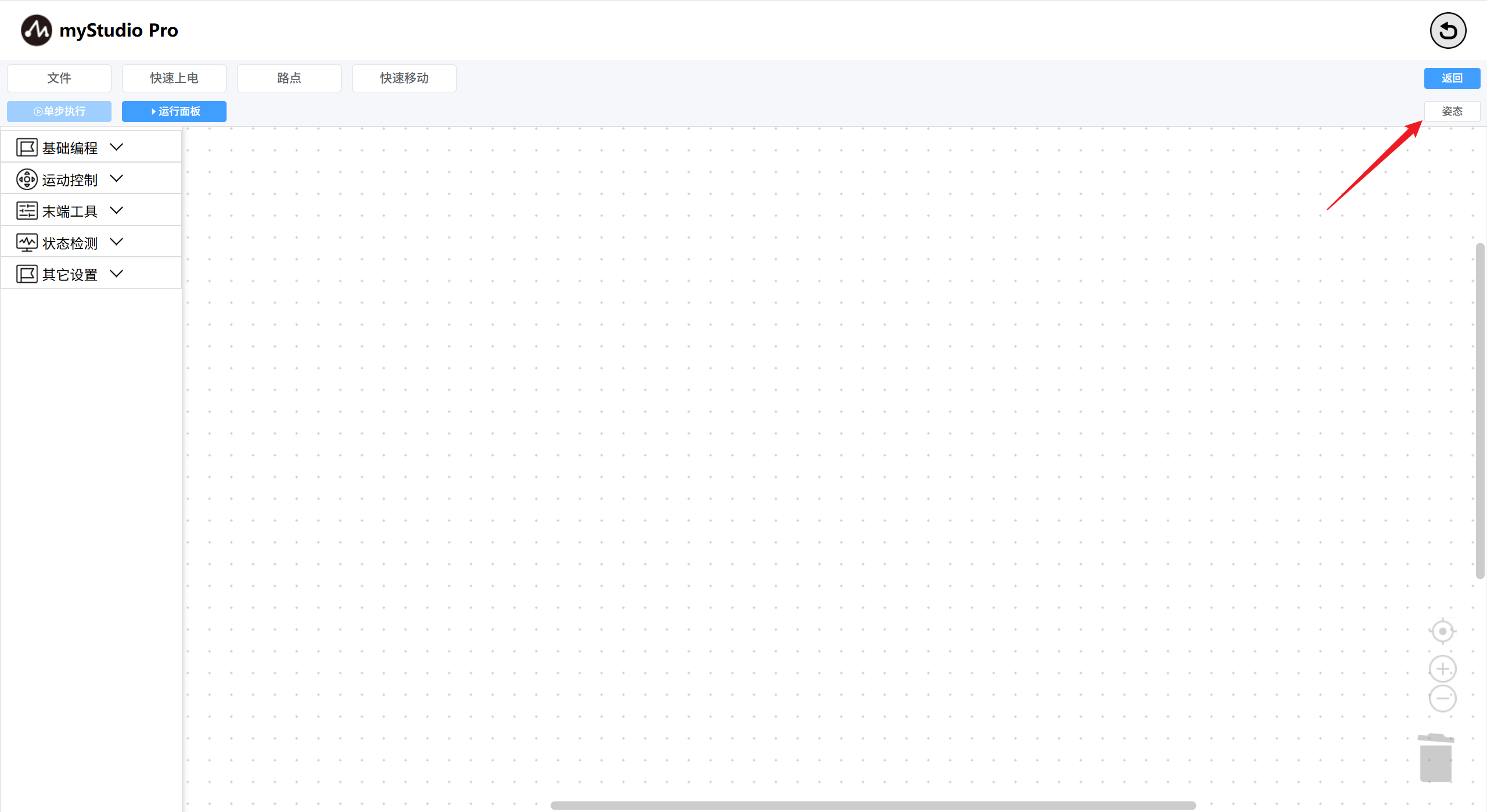
myBlockly主页如下图所示:
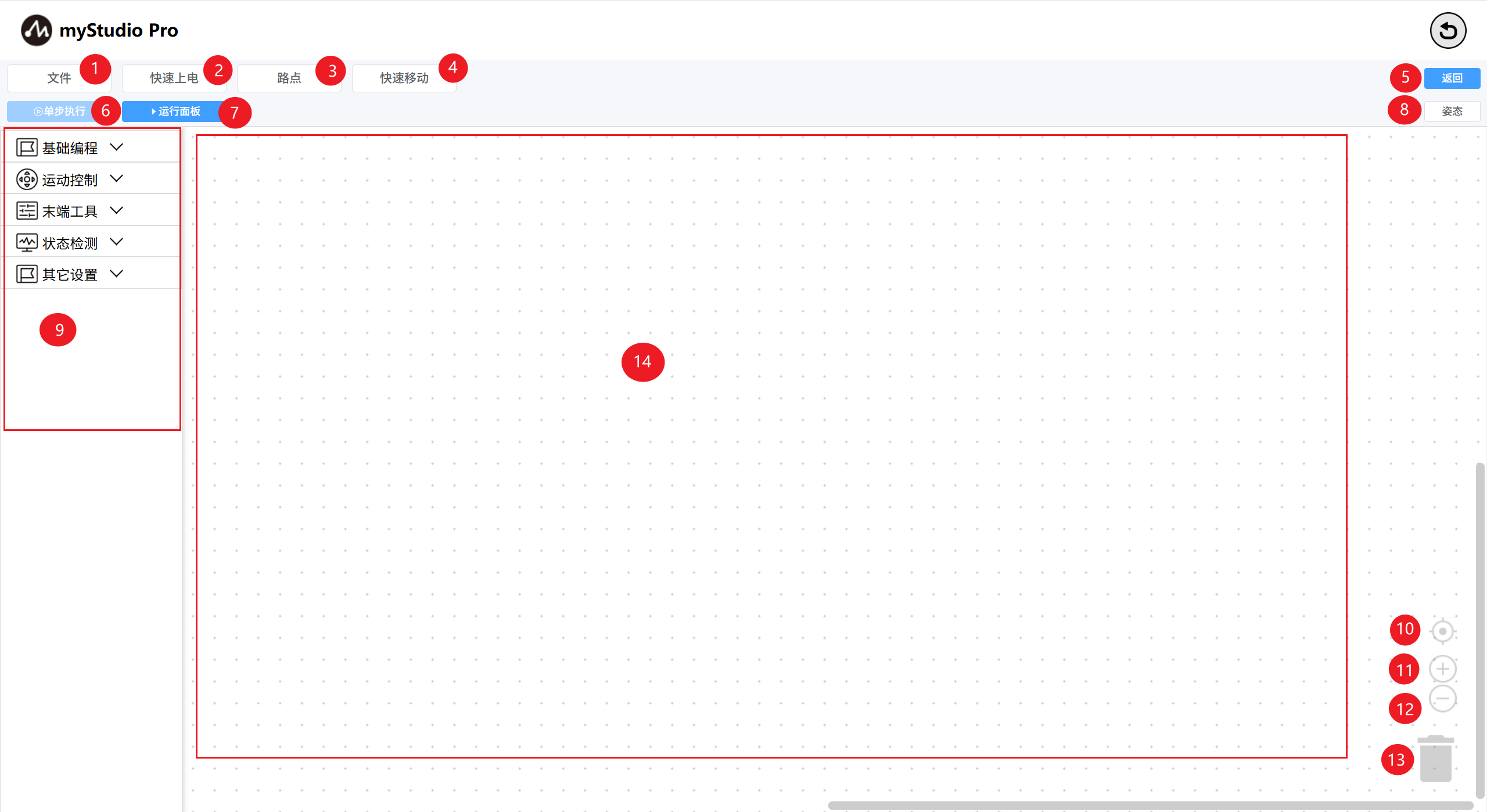
1 myBlockly主界面介绍
| 序号 | 功能介绍 |
|---|---|
| 1 | 文件:可以进行 新建工作区、打开、保存、另存为、案例 的操作; |
| 2 | 快速上电:机械臂上/下电,释放/抱紧关节; |
| 3 | 路点&轨迹:快速创建示教点位并运行,以及录制轨迹并复现; |
| 4 | 快速移动:用于快速控制机械臂运动; |
| 5 | 返回:退出myBlockly主界面; |
| 6 | 单步执行:选中某个积木块,可以单击该按钮,只执行当前选中的积木块; |
| 7 | 运行面板:打开运行面板,在此面板可以运行、调试工作区代码; |
| 8 | 姿态:打开姿态页面,可以看到3D模型的实时仿真运动姿态; |
| 9 | 工具箱(toolbox):提供构建好的积木块供用户使用; |
| 10 | 工作区校准:点击后 工作区(workspace)会回到原点; |
| 11 | 放大:放大 工作区(workspace); |
| 12 | 缩小:缩小 工作区(workspace); |
| 13 | 垃圾箱(trashcan):可将工作区中的积木块拖动到此处删除,也支持从此处取出已删除的积木块; |
| 14 | 工作区(workspace):可将工具箱(toolbox)中的积木块拖动到此处 进行编程; |
2 基础功能使用
我们来写一个小案例,通过这个案例来介绍myBlockly的基础使用
案例描述: 控制机械臂回零,然后控制一关节移动到20度的位置,然后再回到零位。
第一步: 首先点击姿态按钮,打开姿态视图,在这里可以看到仿真机械臂的当前姿态。
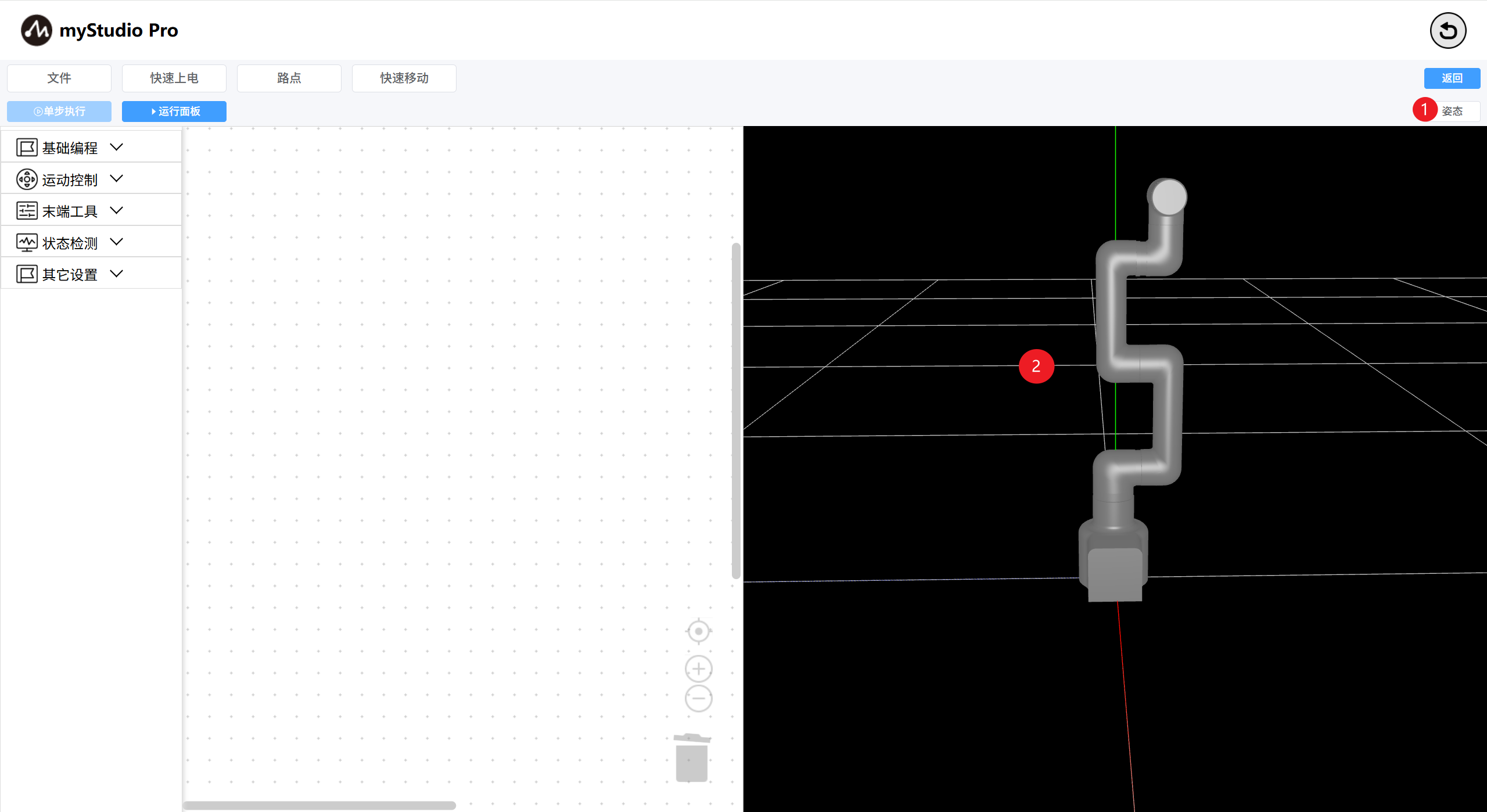
- 1:切换姿态面板:当姿态面板隐藏时点击显示,反之点击收起。
- 2:机械臂仿真模型,可根据当前真实角度实时仿真运动。
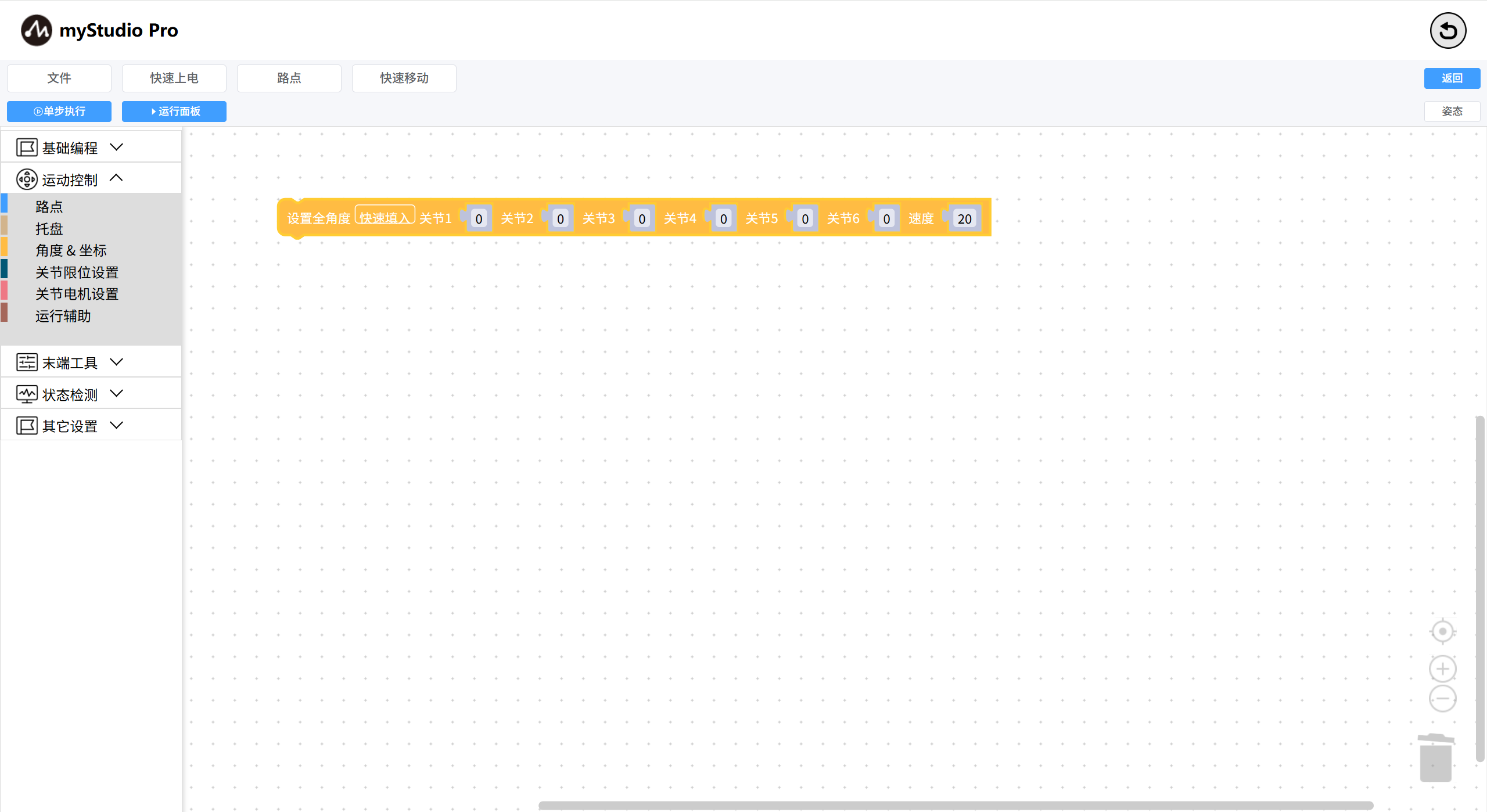
第二步: 开始编程
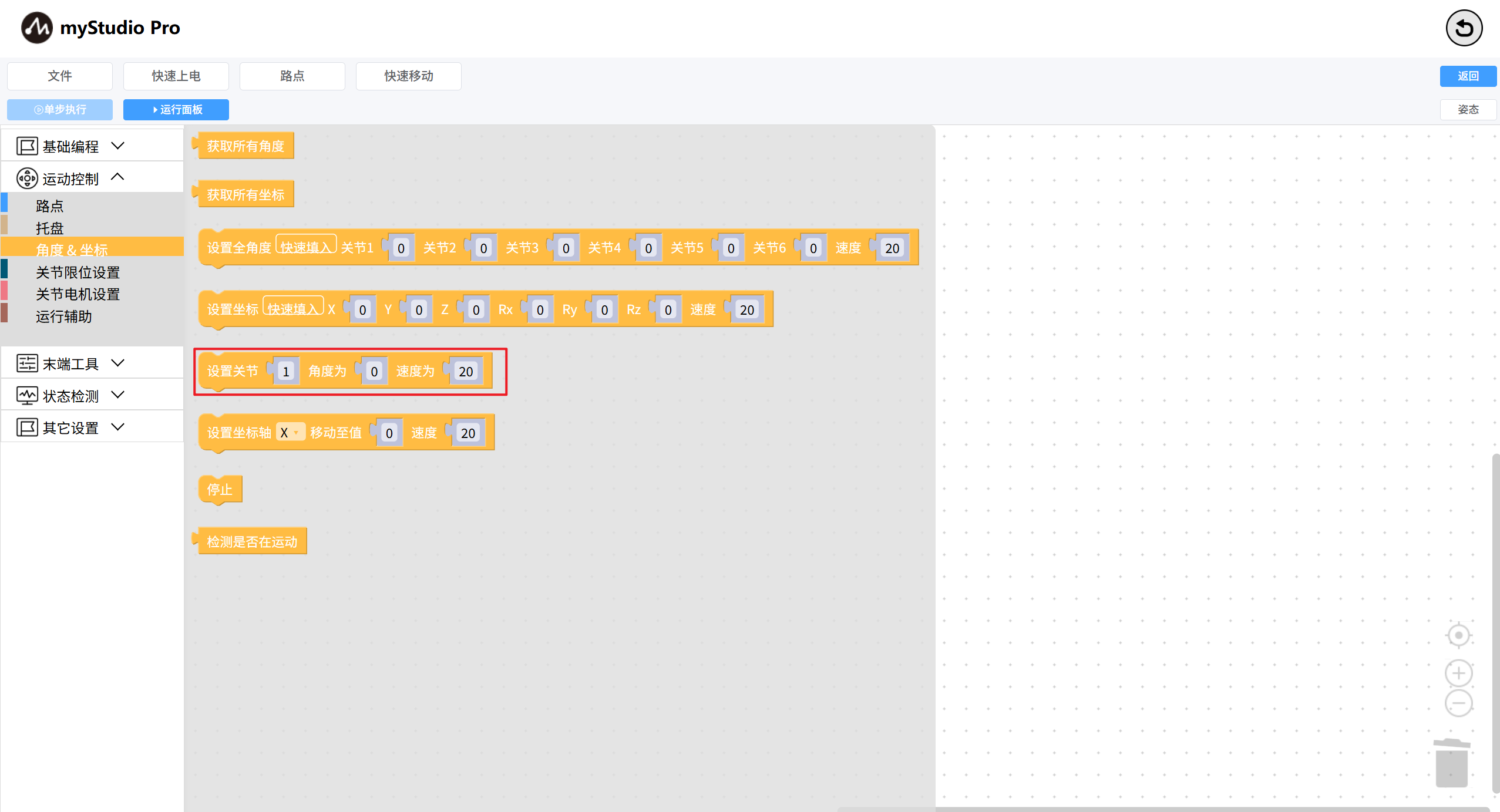
打开工具箱一级分类运动控制,选择二级分类角度&坐标,拖动设置全角度积木块到工作区。
此积木块用于控制机械臂各关节运动到给定的角度,运动速度默认20。
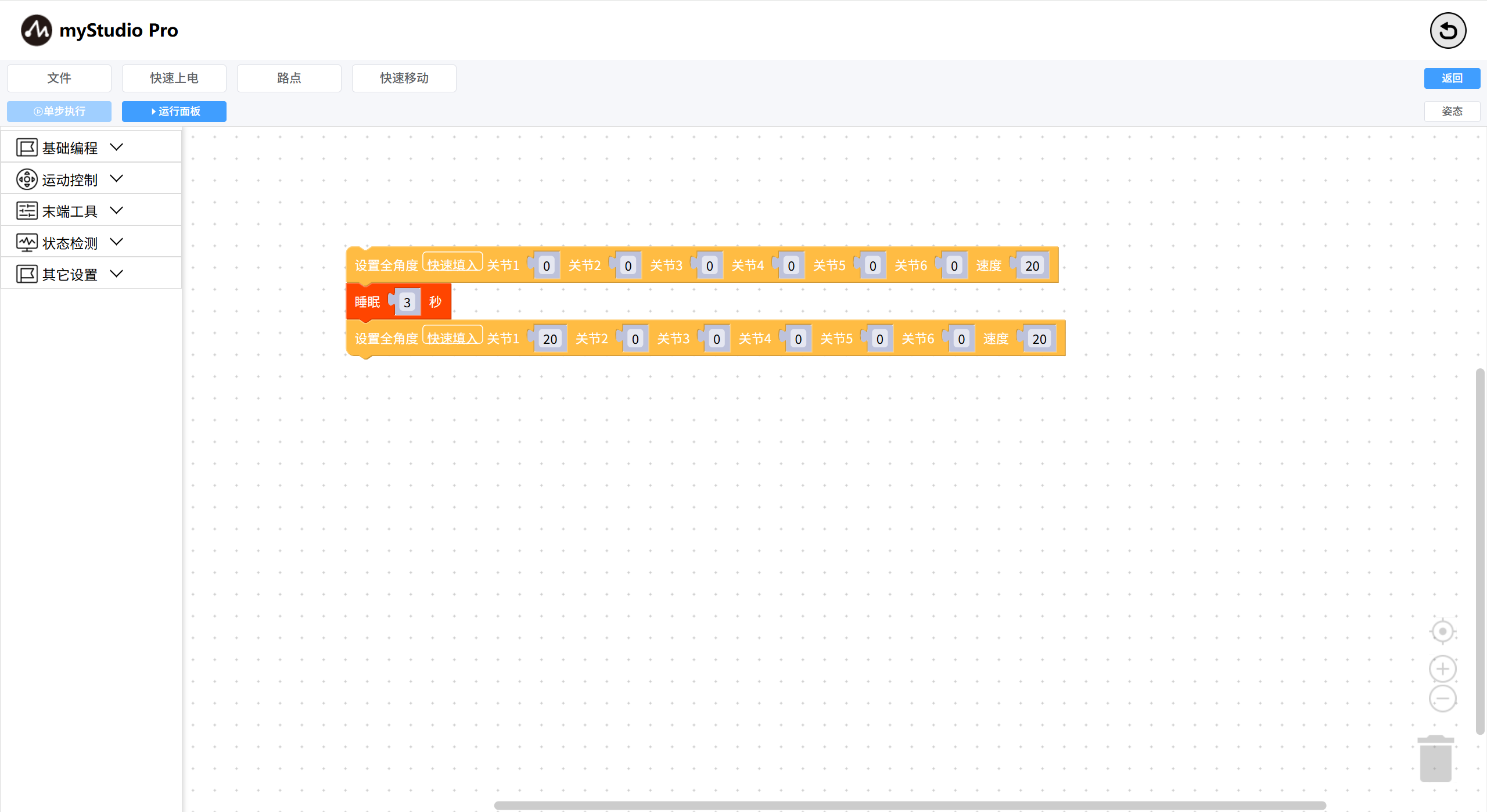
打开工具箱一级分类基础编程,选择二级分类时间,拖动睡眠积木块到工作区,并设置睡眠时间为3秒。

复制设置全角度积木块并修改关节1角度为20:
- 鼠标点击选中工作区中
设置全角度积木块; - 按住键盘Ctrl + C复制
设置全角度积木块; - 按住键盘Ctrl + V粘贴
设置全角度积木块; - 将新积木块
关节1修改为20; - 拖动该积木块使其与
睡眠积木块连接;
同上操作类似,复制睡眠积木块,并设置睡眠时间为 3 秒;
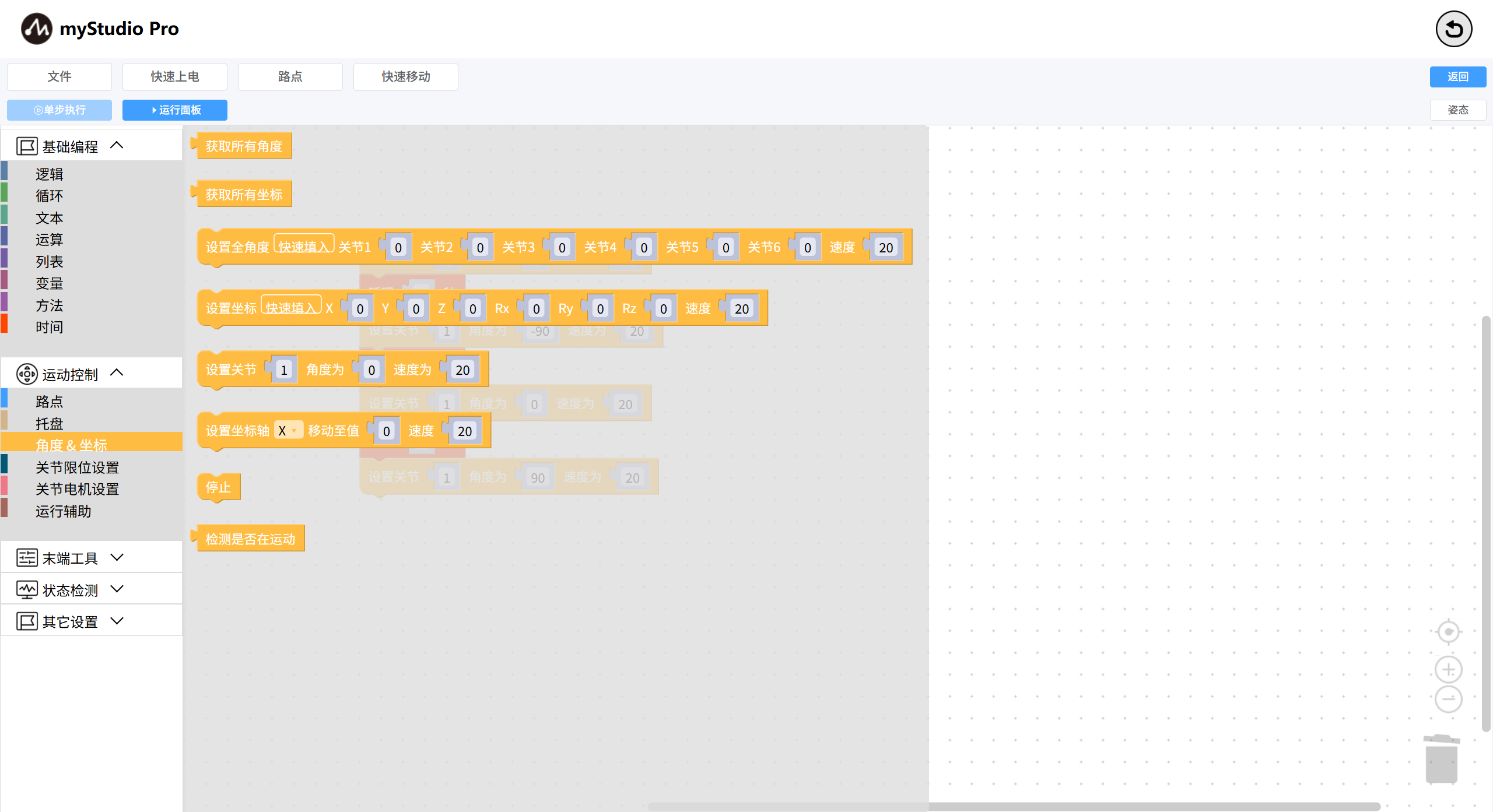
再次复制工作区第一个设置全角度积木块;
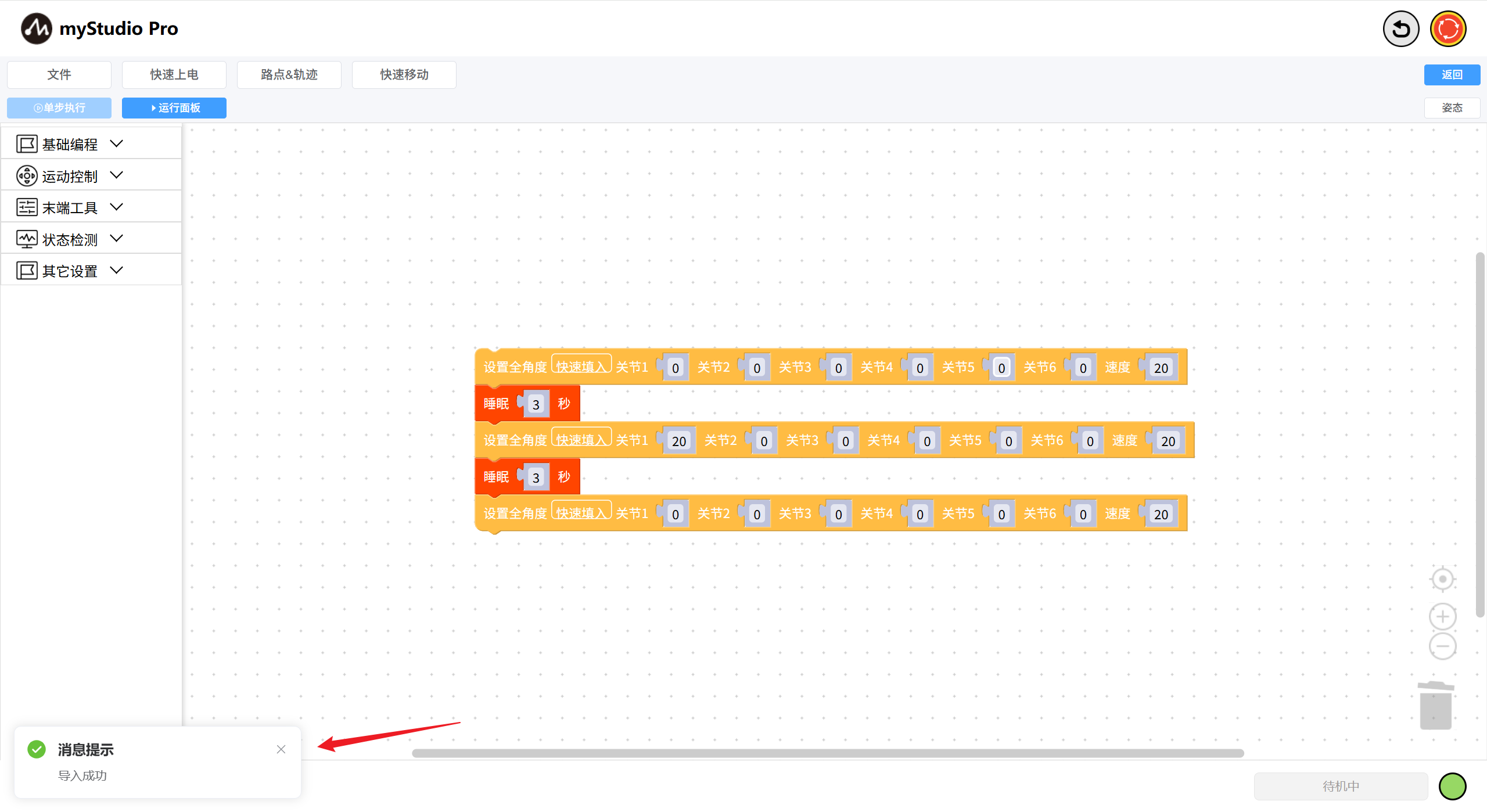
完整代码如下:
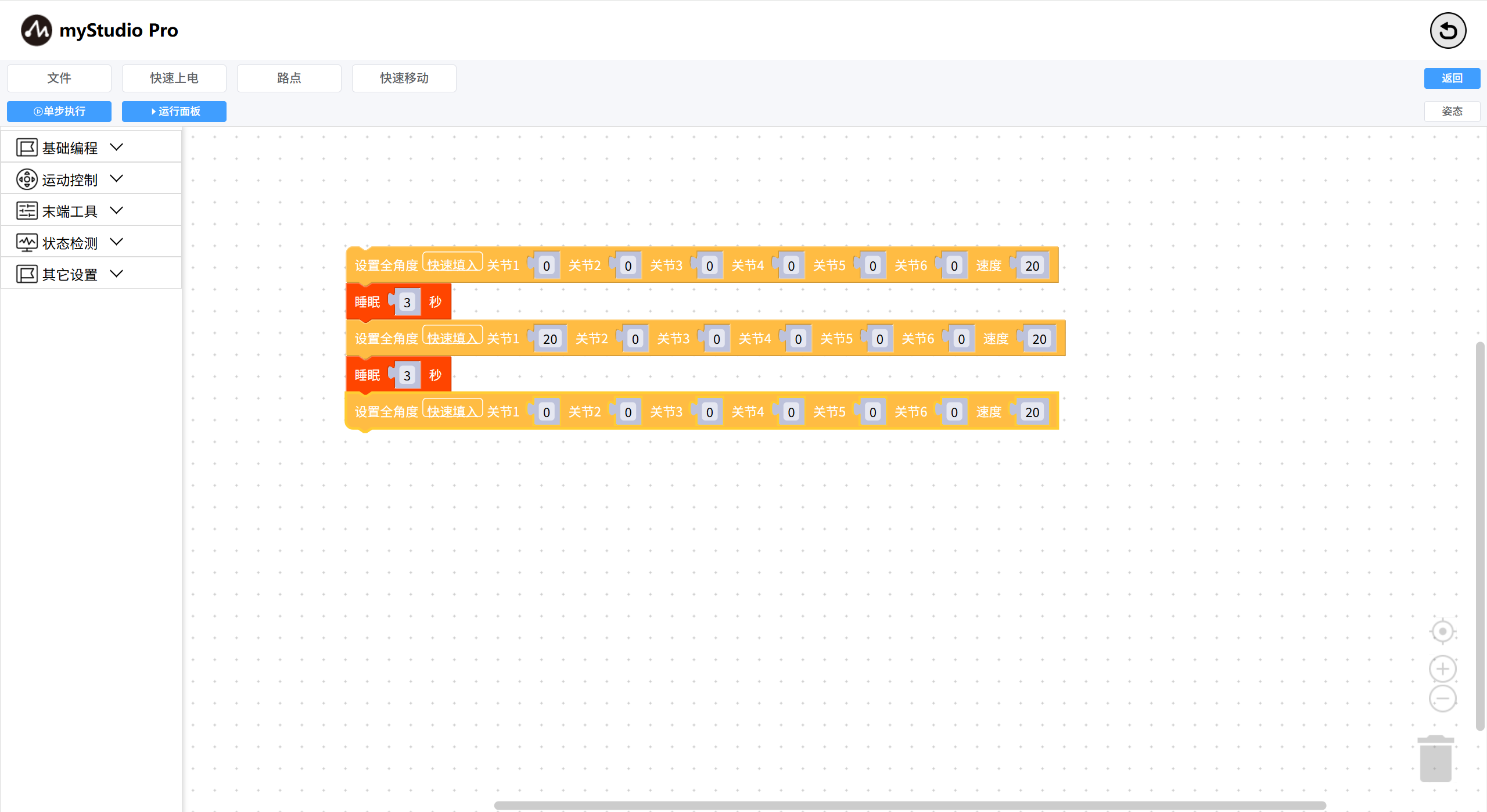
这段代码的意思是:
- 控制机械臂回到零点
- 等待3秒钟
- 使一关节(J1)移动到20度的位置
- 等待3秒钟
- 控制机械臂回到零点
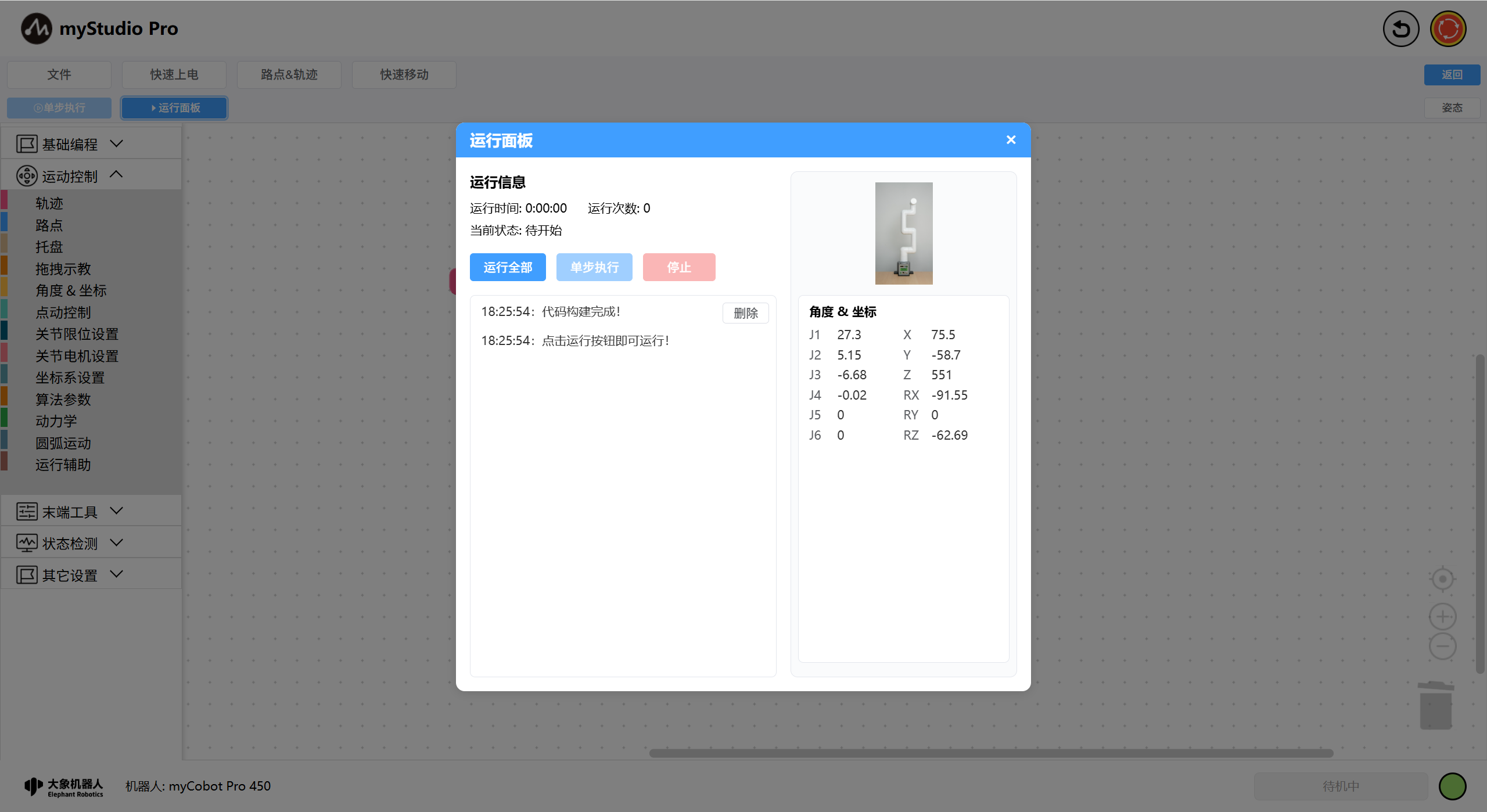
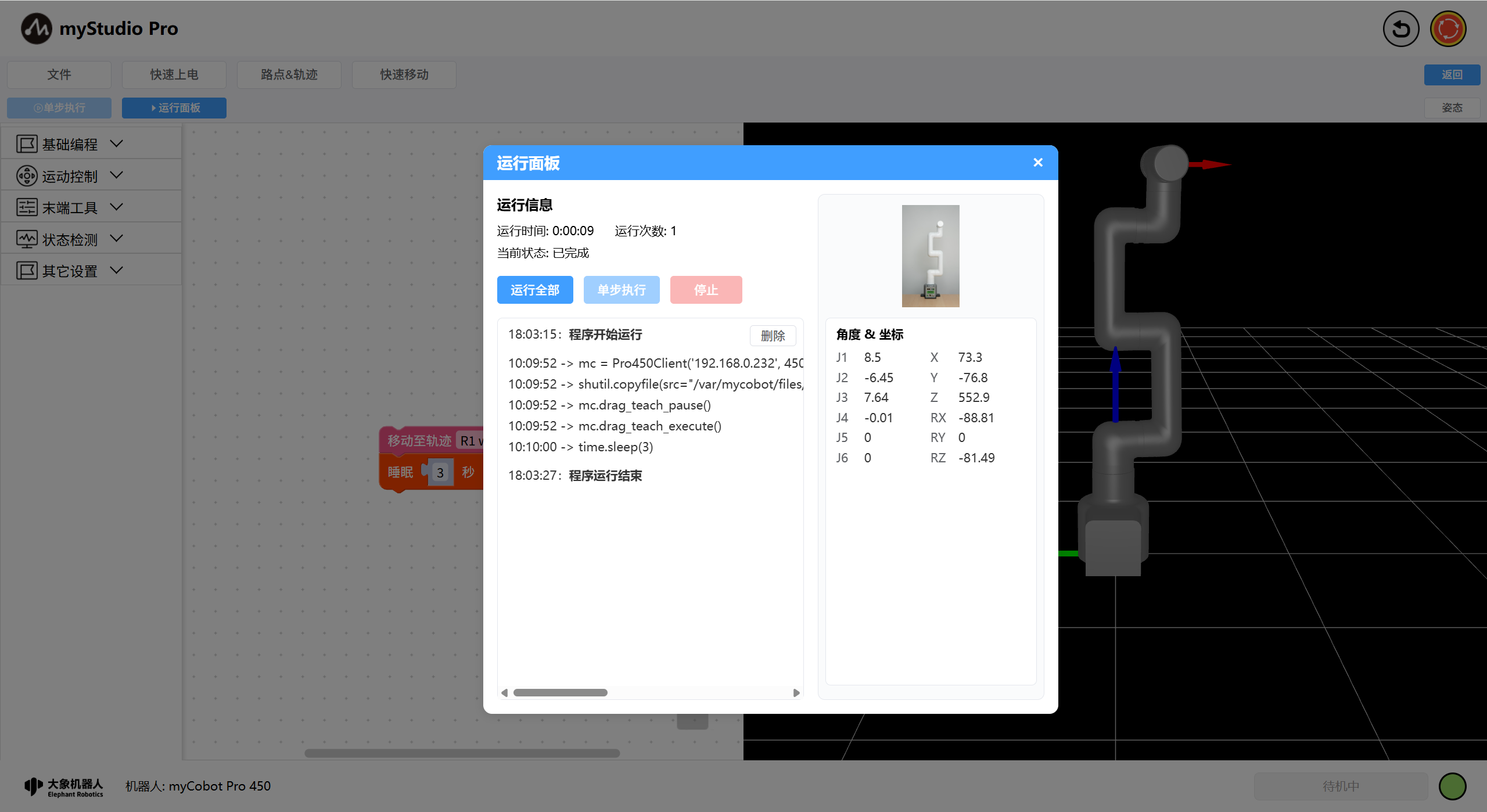
最后,点击运行面板按钮,打开面板后,点击运行全部按钮开始执行代码,运行面板右侧会实时显示关节、角度坐标,同时3D模型也会仿真运动。


代码运行完成,点击面板X 可关闭面板

第三步: 保存 和 加载 文件(或者说保存加载工作区)
myBlockly 支持 工作区的保存和加载。
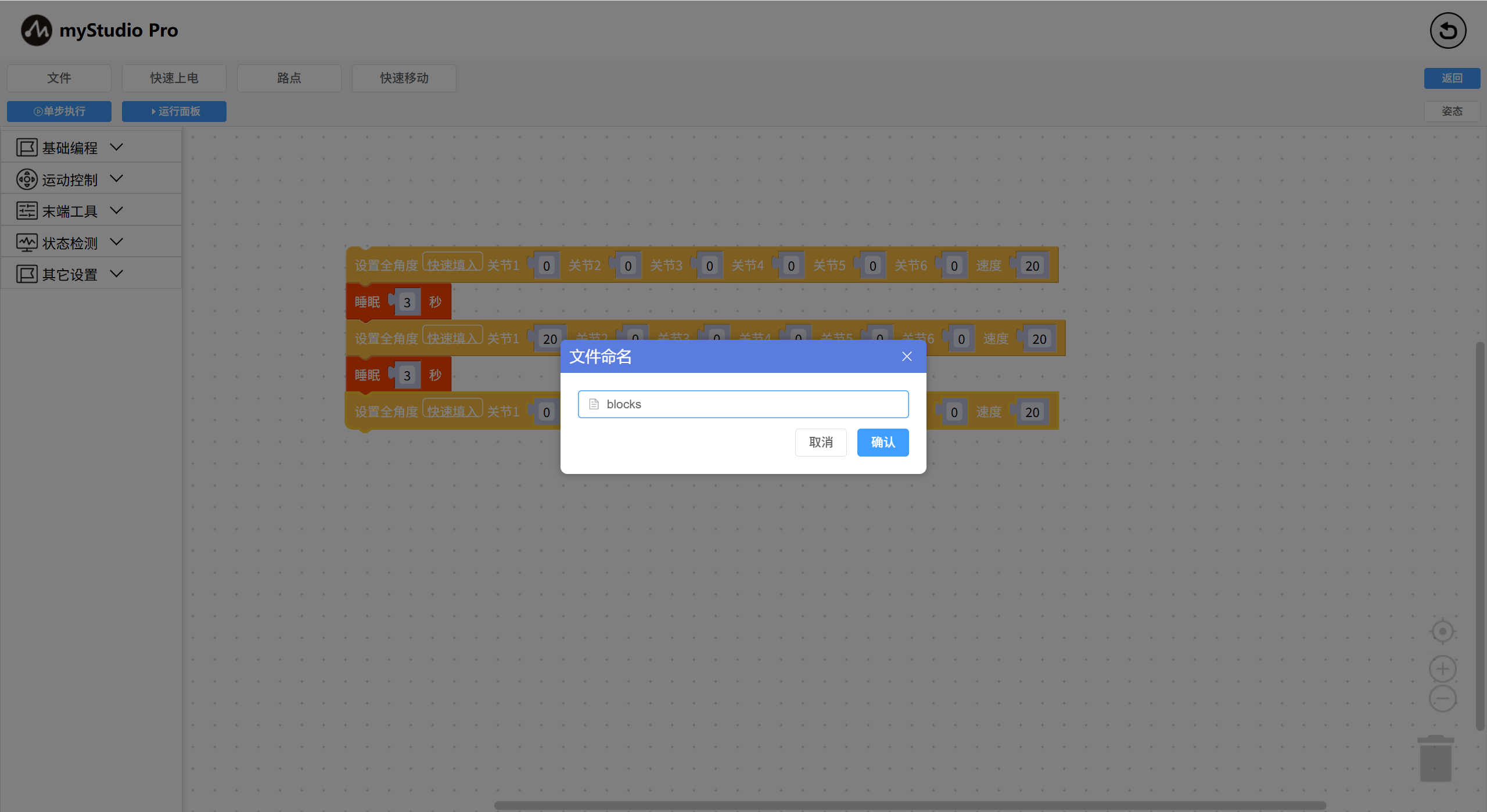
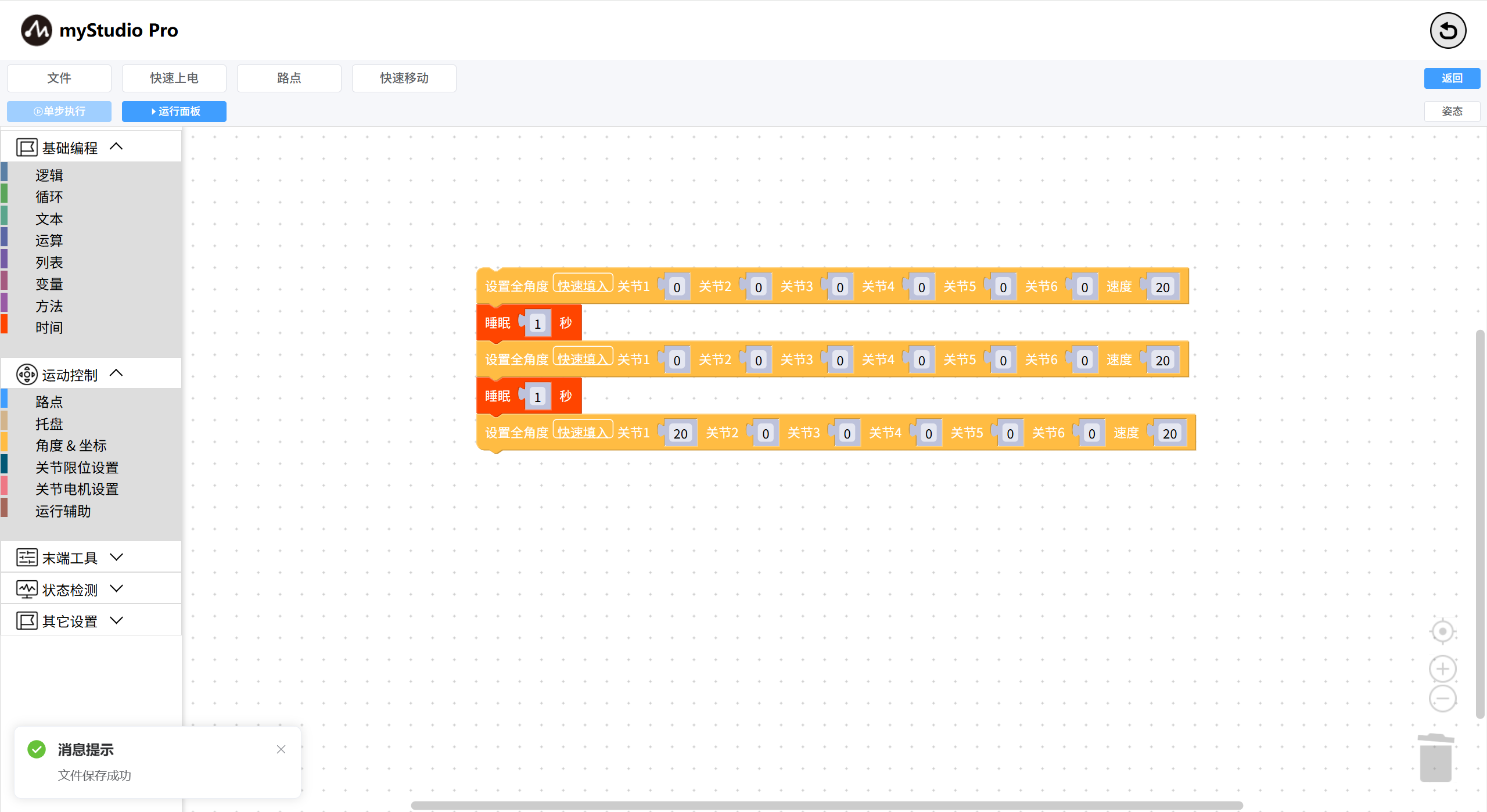
点击文件按钮,出现一个下拉菜单,点击其中的保存按钮,会显示文件命名模态窗,输入自命名并点击确认即可保存(默认保存至测试空间),保存结果会在左下角以消息提示的形式展示。
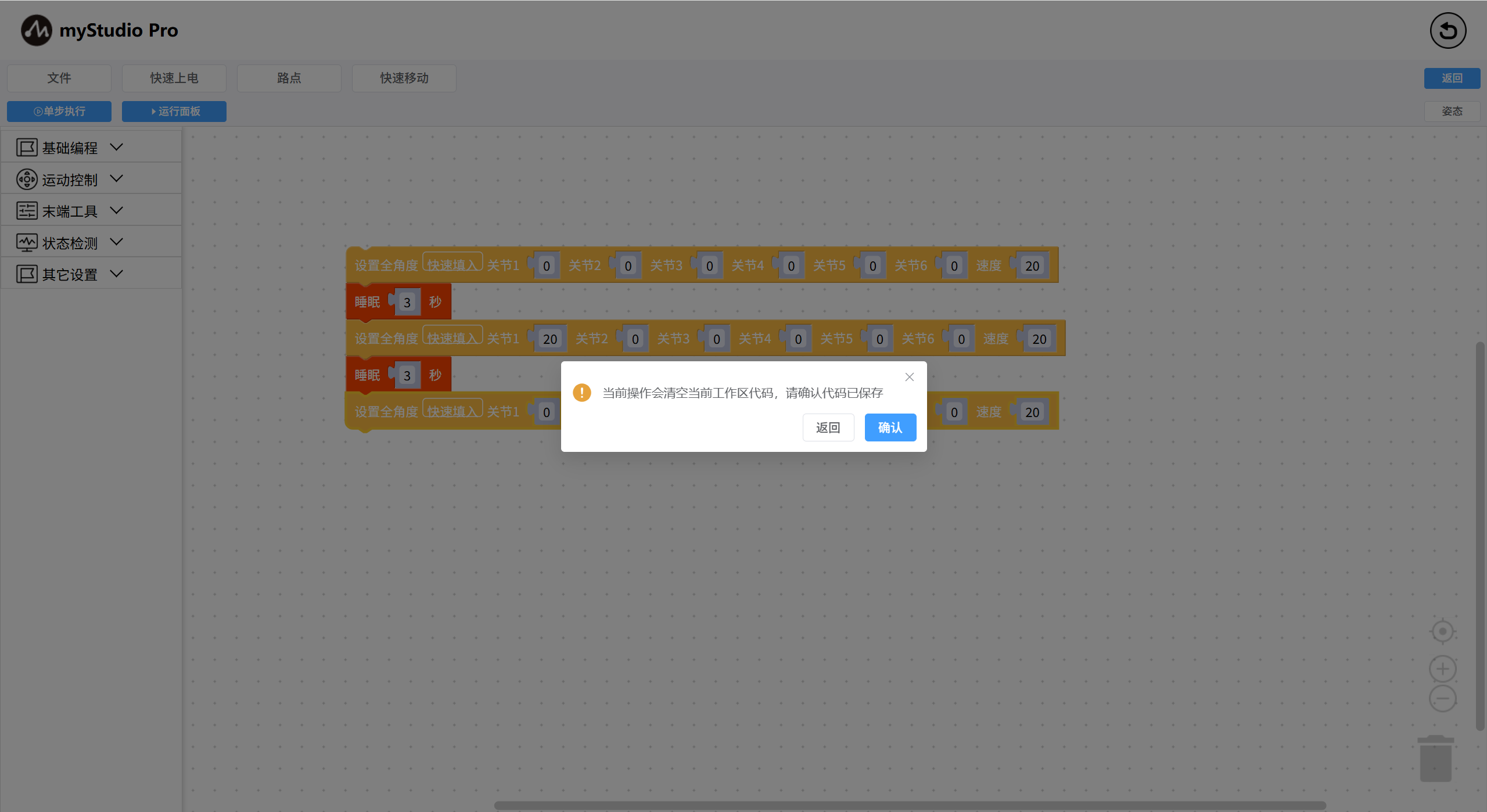
第四步: 新建工作区 操作(这个操作会清空工作区所有代码)
点击文件按钮,出现一个下拉菜单,点击其中的新建工作区按钮,会出现提示,点击确认按钮
新建工作区完成
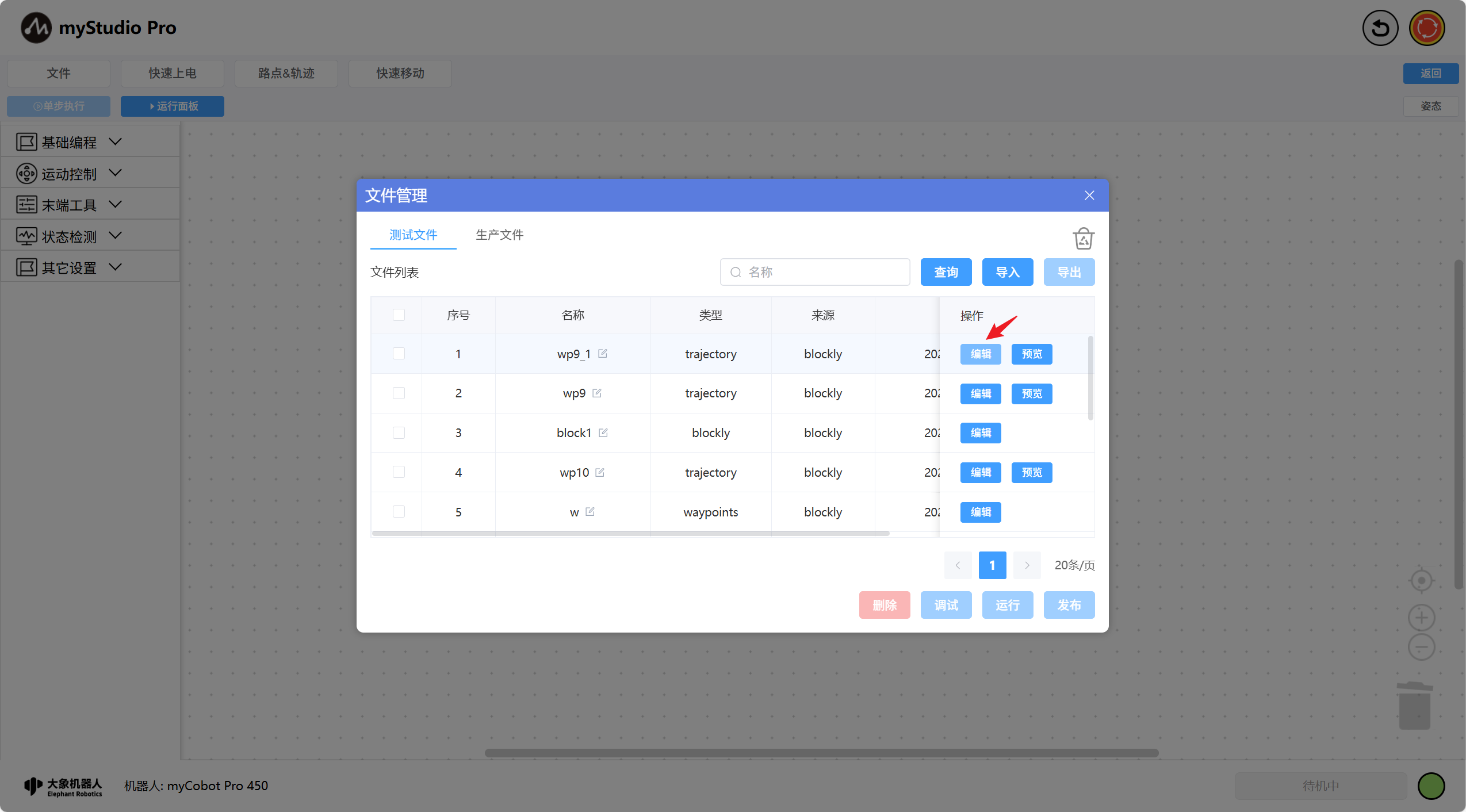
第五步: 操作,加载我们之前保存的工作区文件。
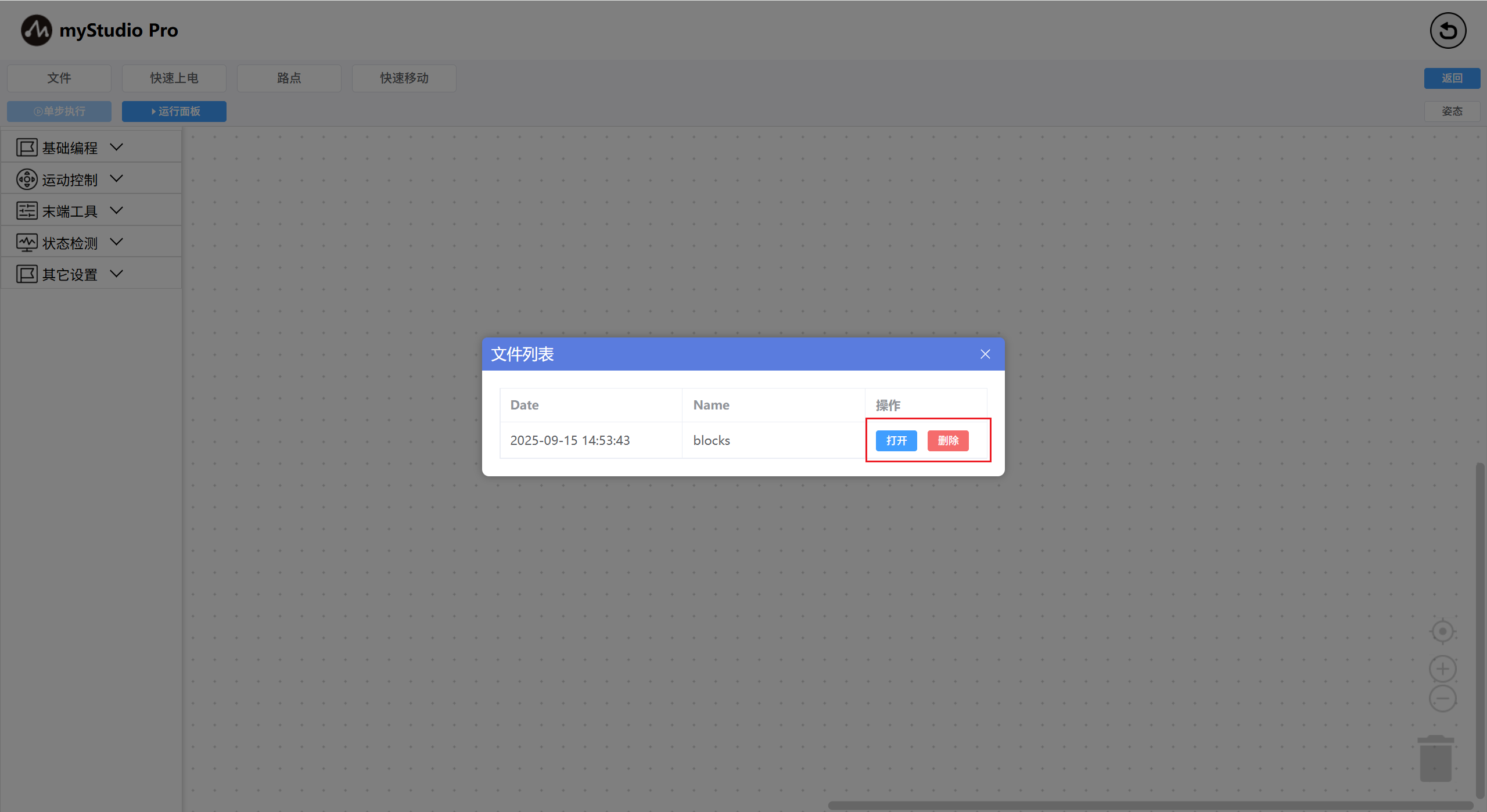
点击文件按钮,出现一个下拉菜单,点击菜单中 打开 按钮后,会展示已保存文件列表,选择需要加载的文件,操作列中的编辑按钮即可将文件加载到工作区。

加载完成
3 快速填入数据
本章介绍积木块的中 快速填入 功能。
当一个积木块拥有过多的数据项,一个一个填入未免过于麻烦。 于是对于数据项填入项过多的积木块,我们可以使用快速填入功能。
快速填入数据来源:当前机械臂姿态的角度或坐标数据。
目前支持快速填入的积木块有以下几个:
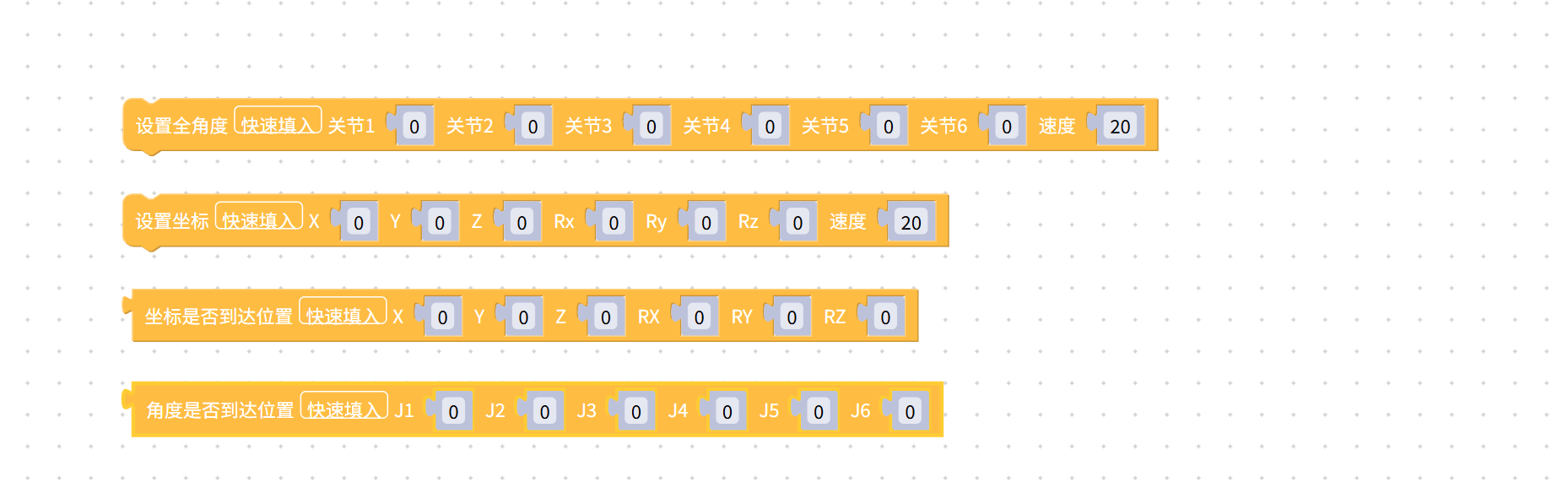
如何使用快速填入
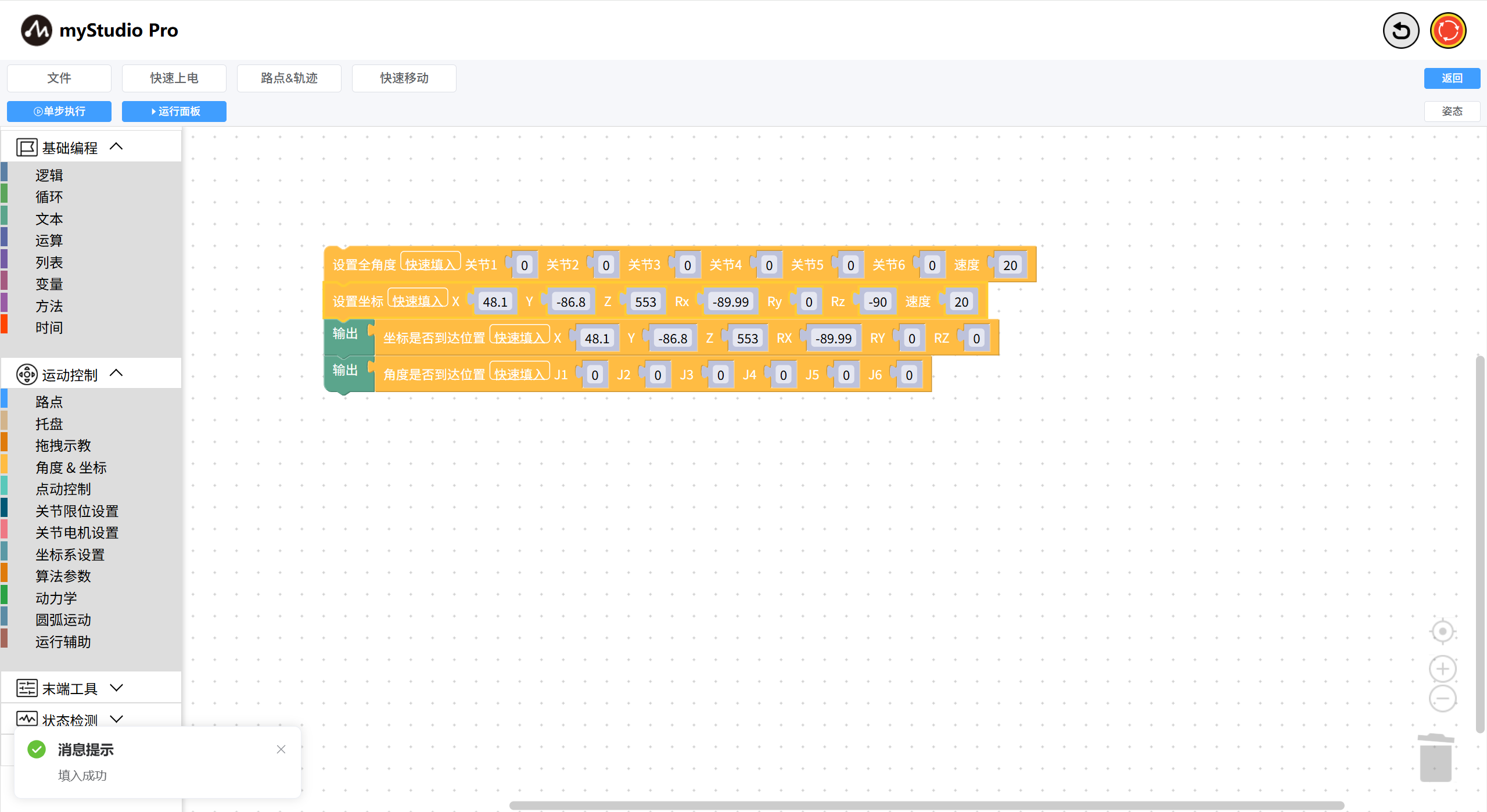
以设置设置全角度积木块为例,首先需要选中积木块,然后点击积木块中的 快速填入按钮即可。

当页面上出现下图提示框,即填入成功。
4 快速移动
什么是 快速移动 ?简单来讲就是,无需编程,仅通过鼠标点击的方式快速控制机器人移动。
备注:myStudio Pro 中有两个 快速移动 控制面板,两者功能相差不大
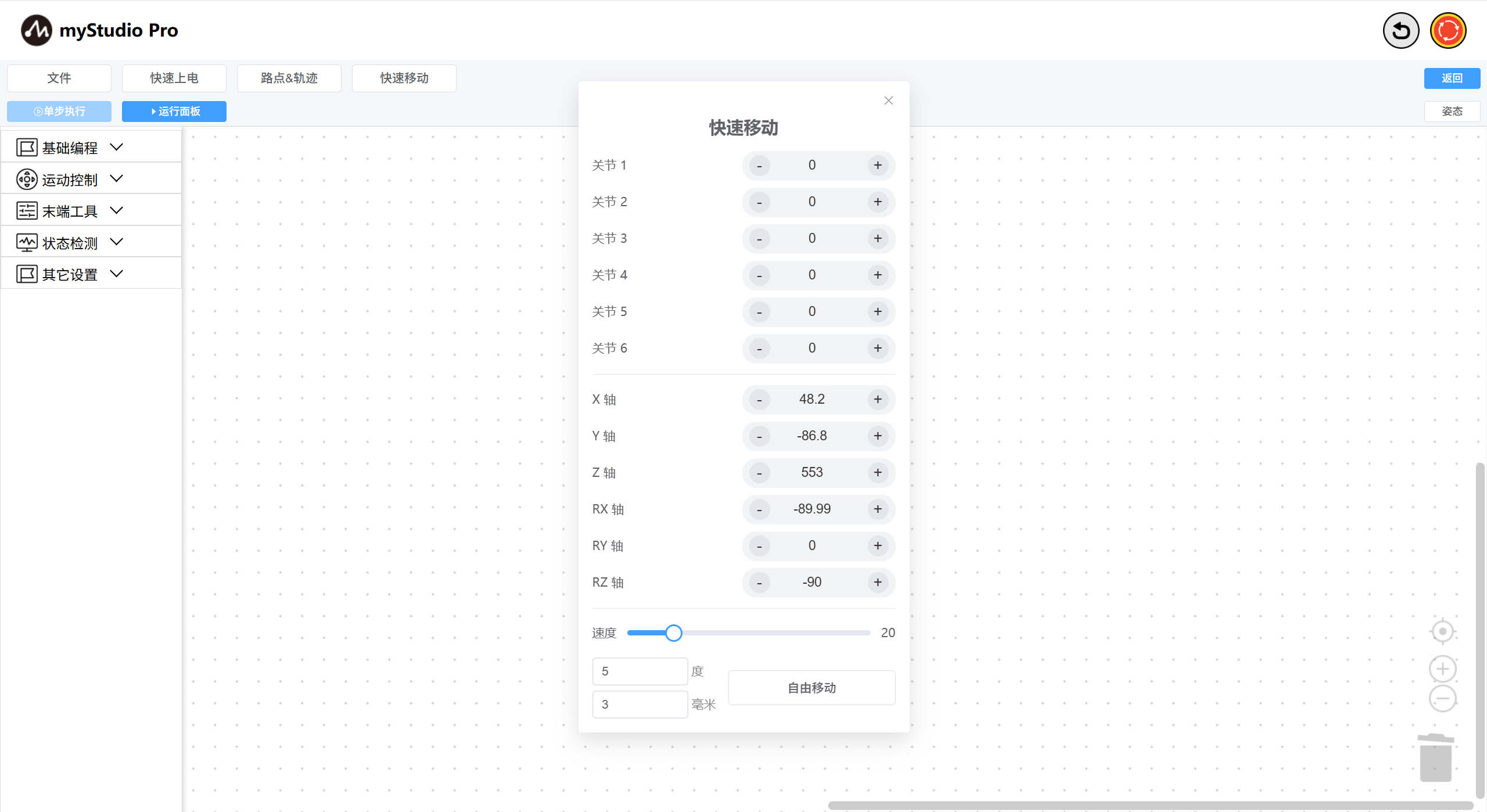
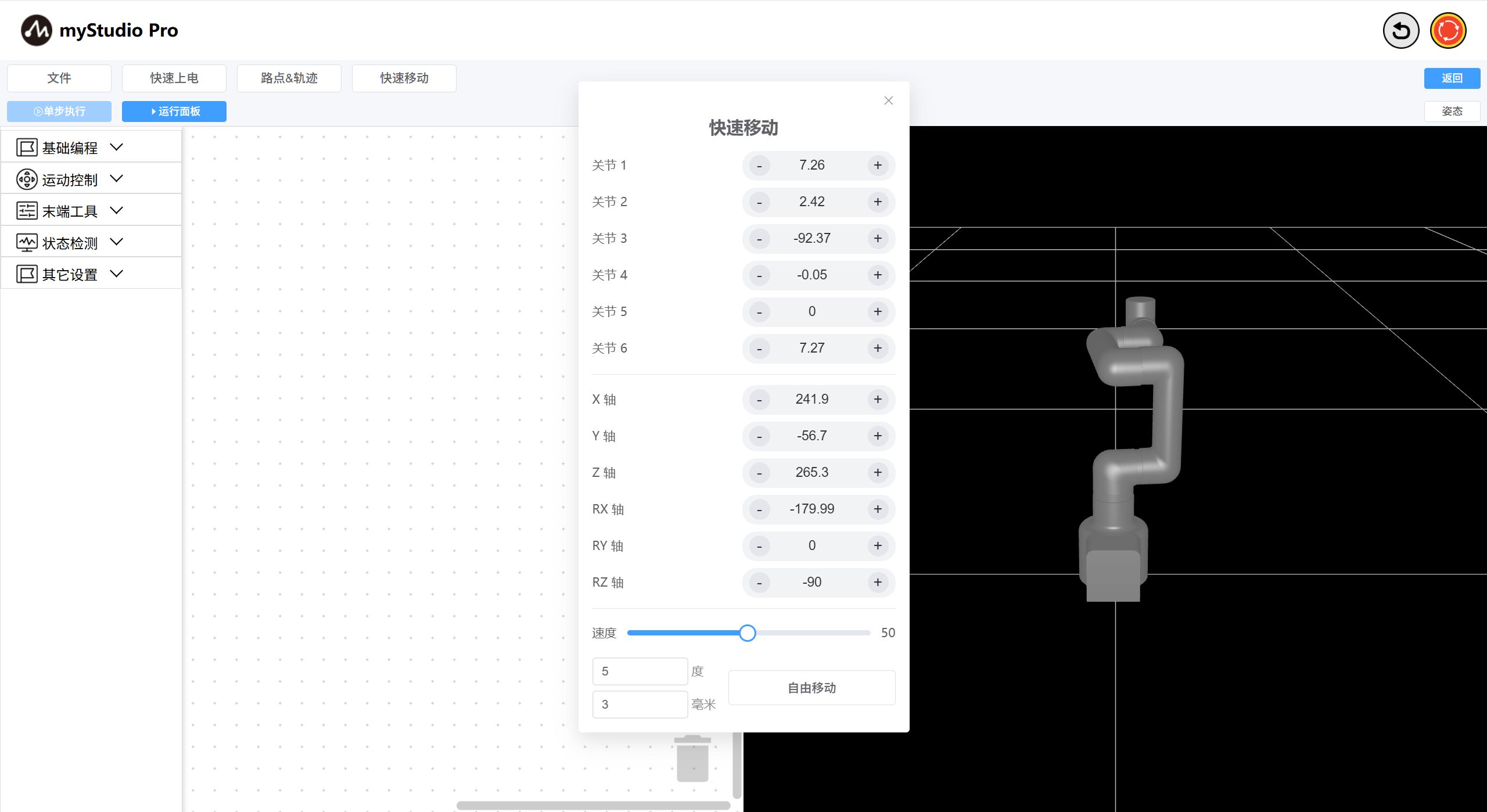
第一步:点击快速移动按钮,打开 快速移动 面板,等待机器人数据返回。
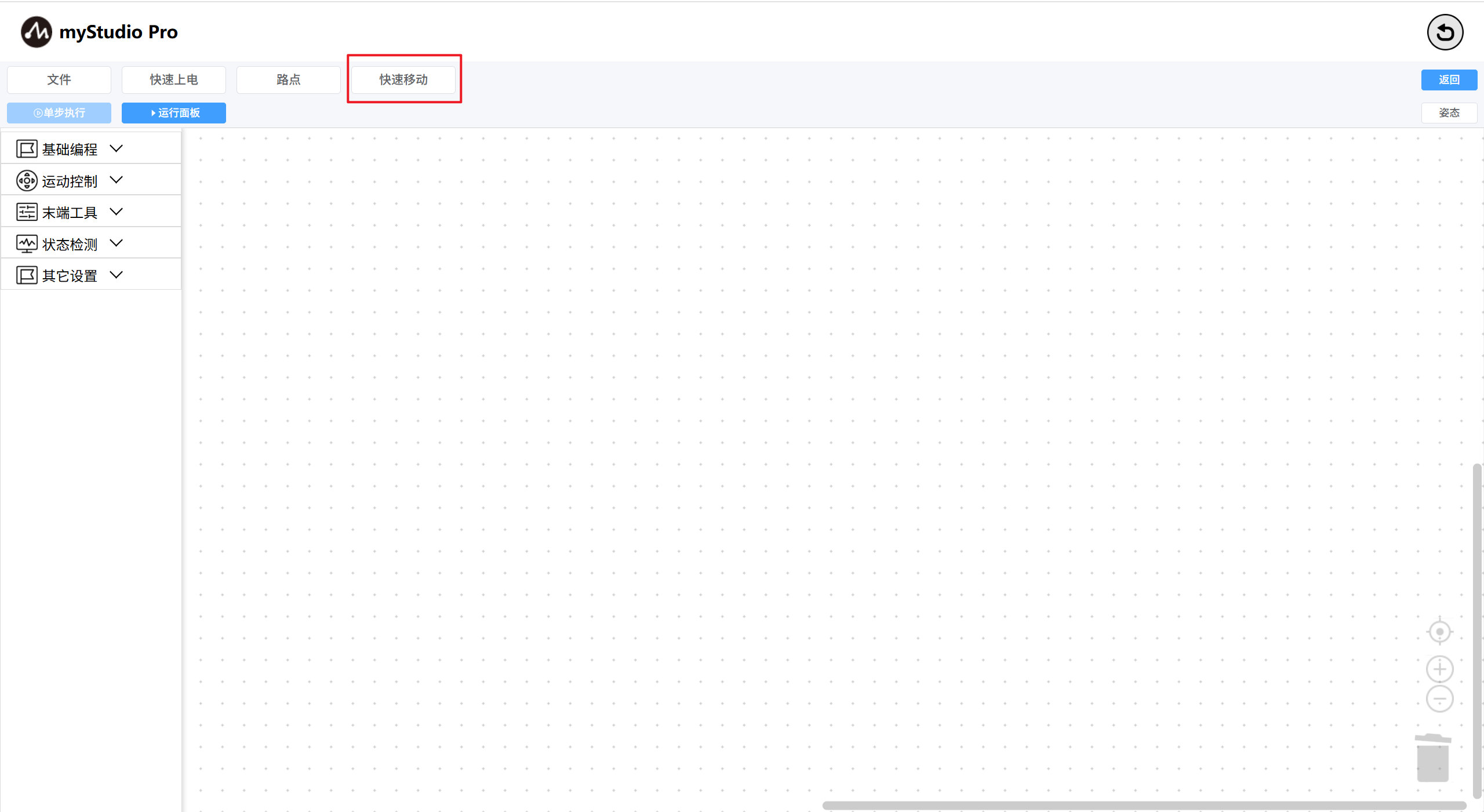
如果没有数据全为零,请检查是否已连接机械臂,机械臂是否正常
第二步: - / +按钮控制机械臂的不同关节,支持单点、长按持续移动和直接修改角度、坐标并按下Enter回车控制。
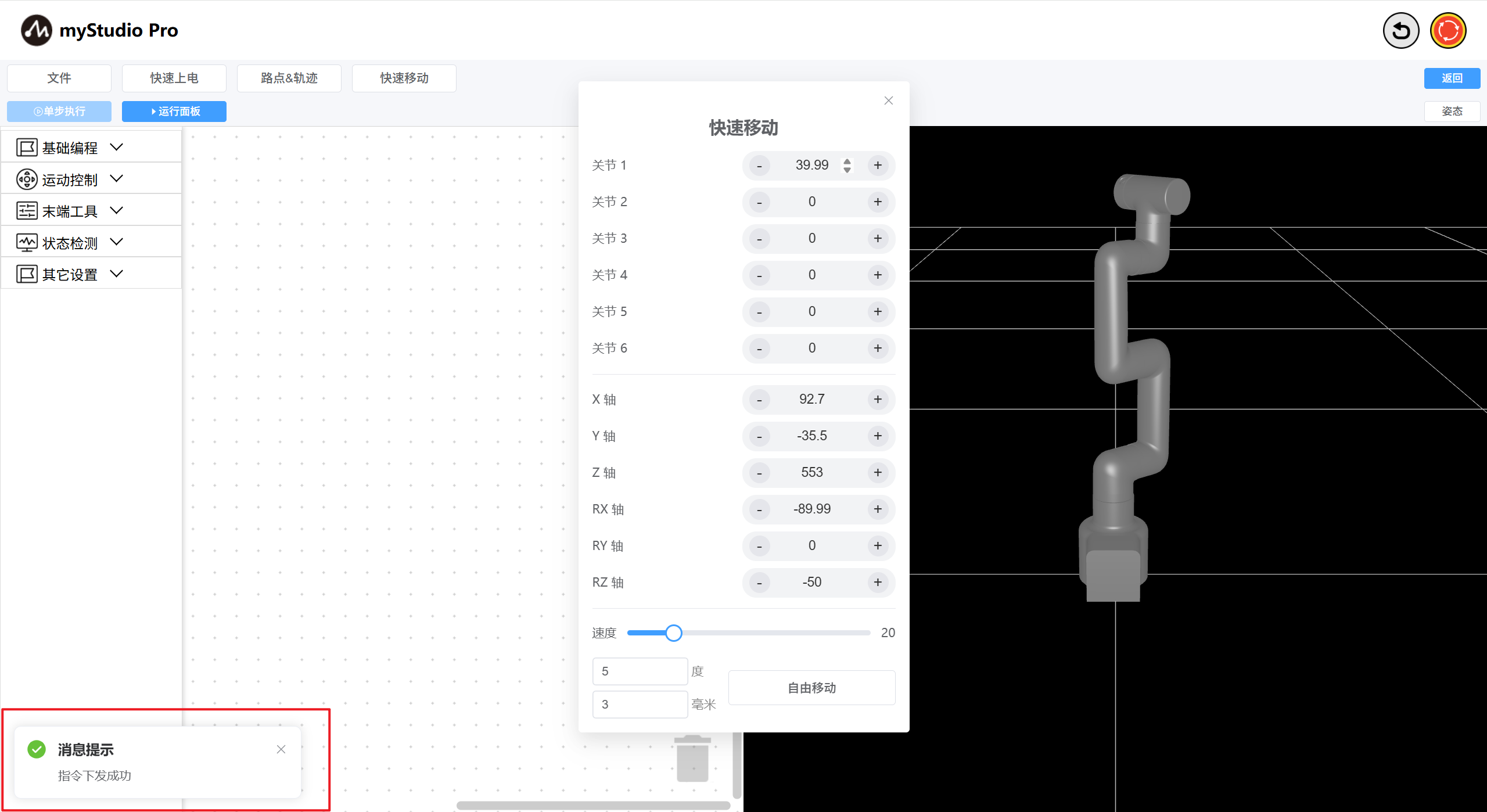
第三步: 控制坐标。
首先需要先将 关节 3 移动到 -90左右的位置,如下图。
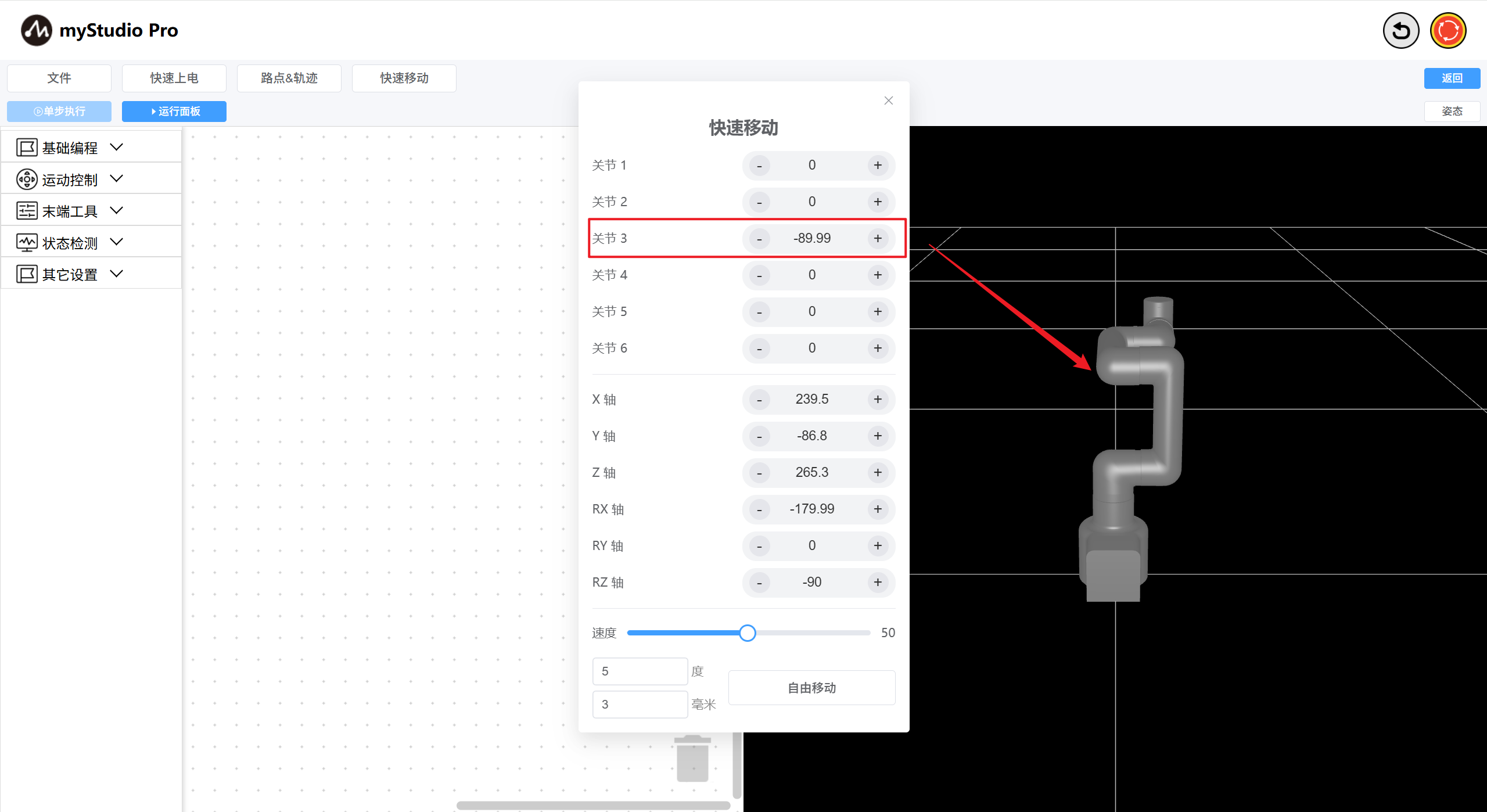
然后就可以点击不同坐标轴的- / + 按钮来控制坐标了
对于其它功能,请查阅快速移动
5 学习使用坐标控制
主要涉及到的API:
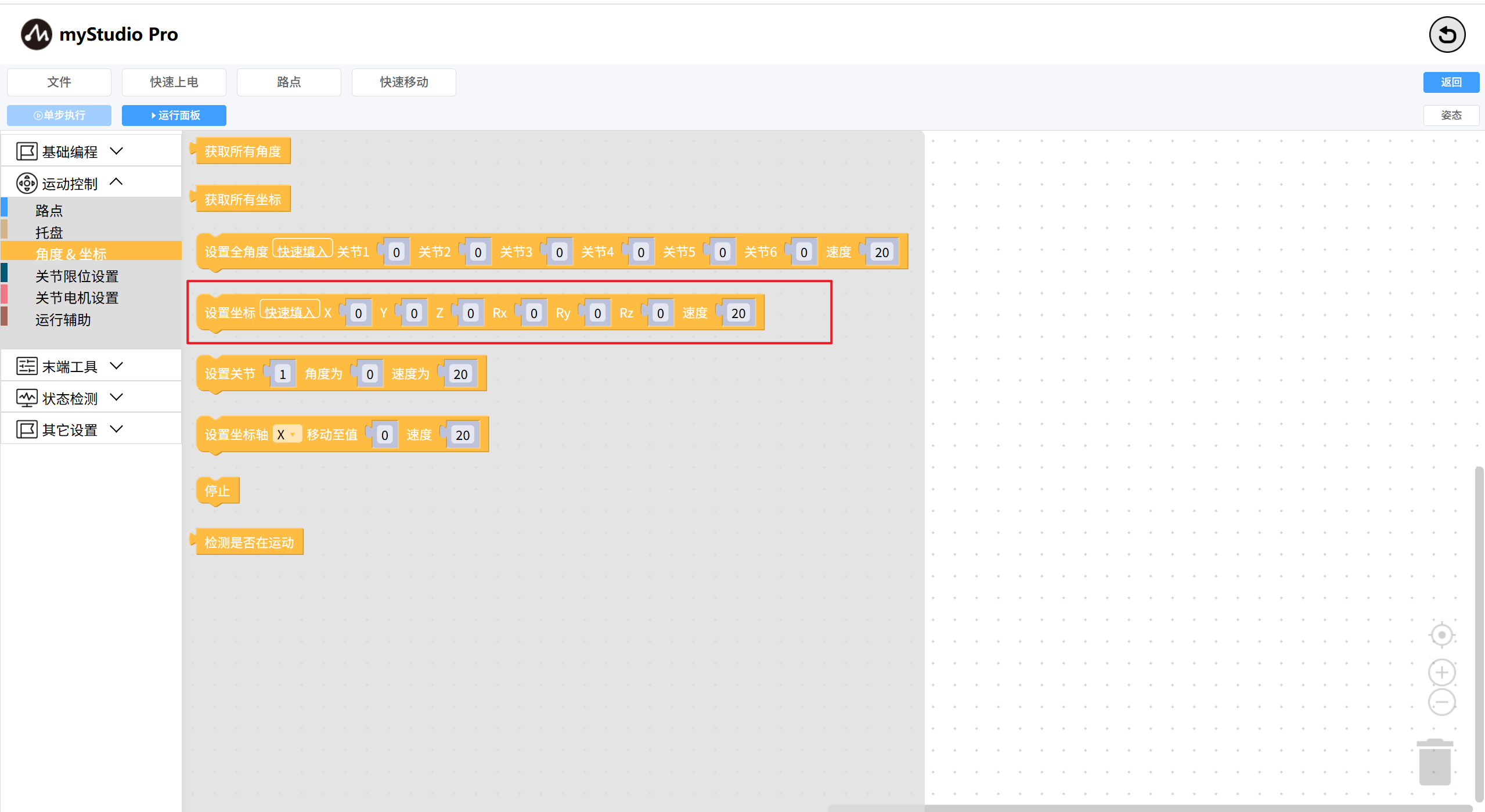
设置坐标
原型:
send_coords(values,speed)接口说明:设置机械臂多坐标
参数:
values:[X,Y,Z,RX,RY,RZ]
speed:速度,范围为 1-100
小案例
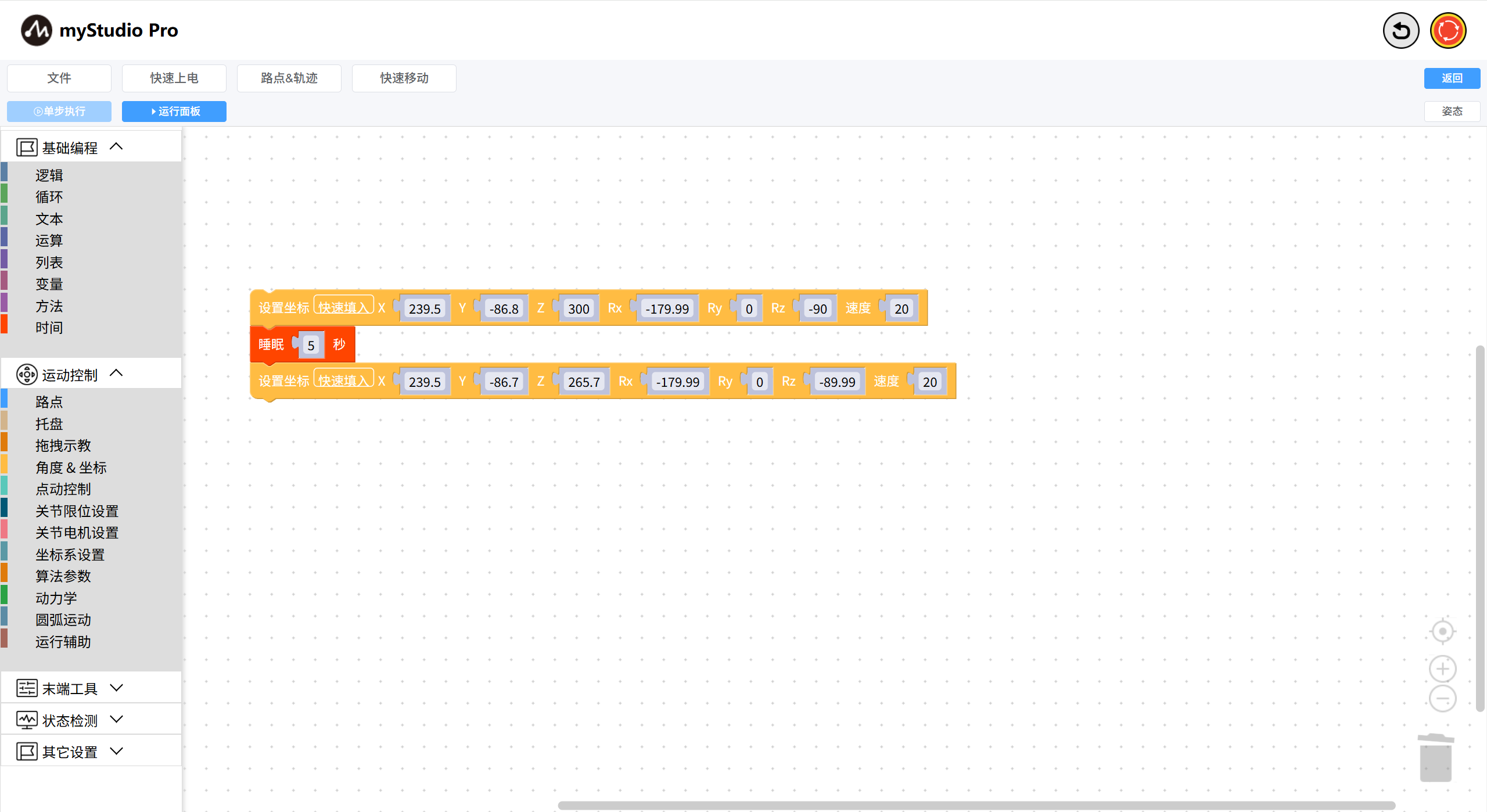
首次使用坐标移动前,需要执行的一些操作:
机械臂回到零位,可参考控制机械臂回零
设置机械臂坐标运动的初始姿态(机器J3需要与地面平行)
如下图代码所示:

打开
运行面板,运行代码。
坐标移动
拖动一个设置坐标积木块到工作区,并点击积木块中的快速填入按钮填入数据,并将 Z 轴数据修改为 300
完整代码如下:
执行代码,整个过程观察到机械臂在上下移动

6 单步执行
所谓的单步执行,是指:单积木块执行。当工作区存在大量积木块时,我只想执行其中的一个积木块,看看是什么效果。这个时候就可以用到 单步执行
单步执行 按钮 默认处于禁用状态,是不可点击的
第一步: 拖动几个设置关节积木块进入工作区
第二步: 选中 设置关节 积木块,观察到 单步执行 按钮已被解锁(颜色变为了深色)
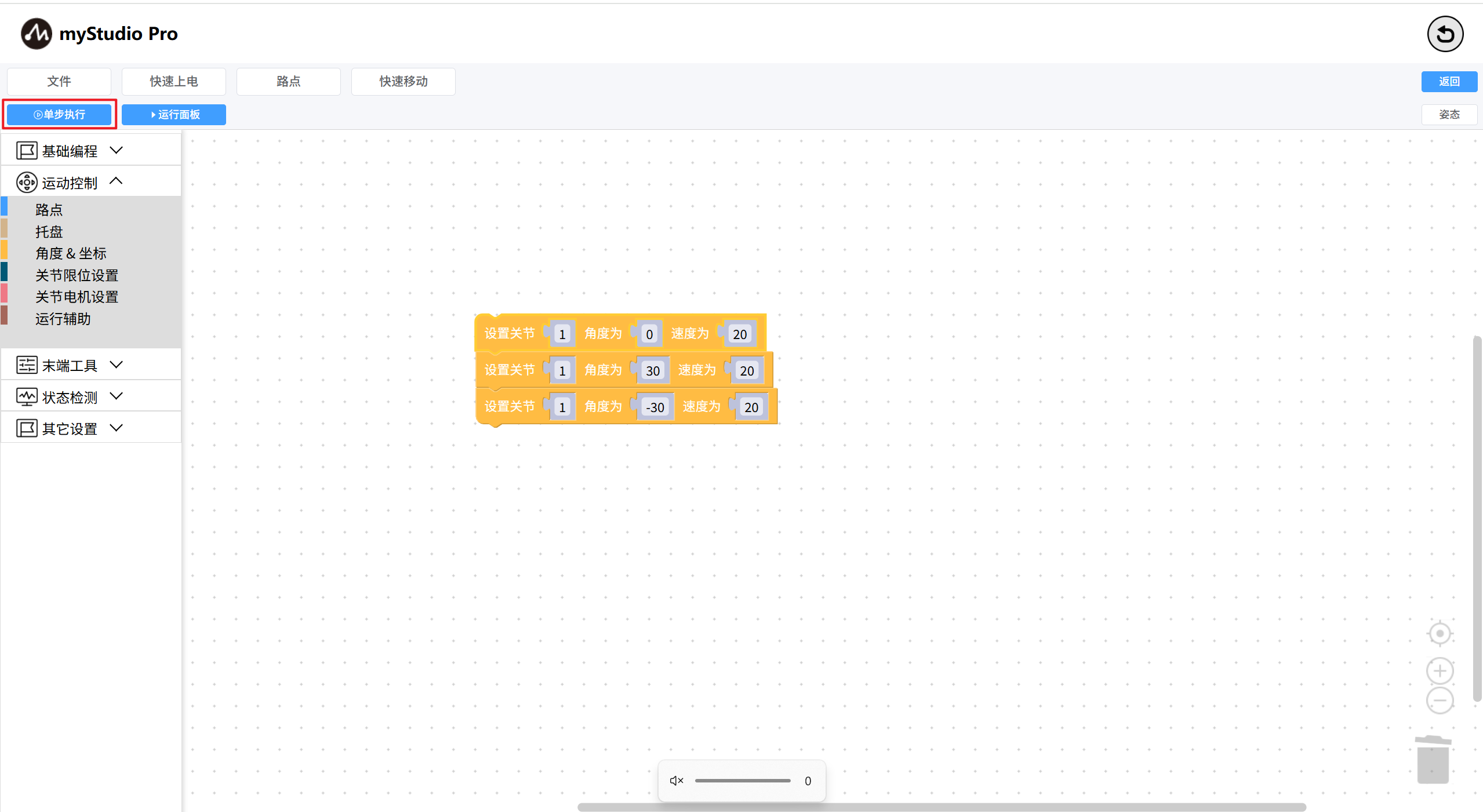
第三步: 点击 单步执行 按钮,会自动打开运行面板,并开始执行代码。同时,观察机械臂运动变化。(单步执行设置关节1为30°)

7 程序控制
介绍如何通过运行面板来调试积木块代码,实现程序的 暂停、恢复、单步执行、停止。
编辑一段控制 机械臂 关节1 运动的程序

点击运行面板按钮,当运行面板弹出后,点击运行全部,马上点击 暂停按钮,程序会在执行完第一条指令mc.send_angle(1,0,20) 后暂停。
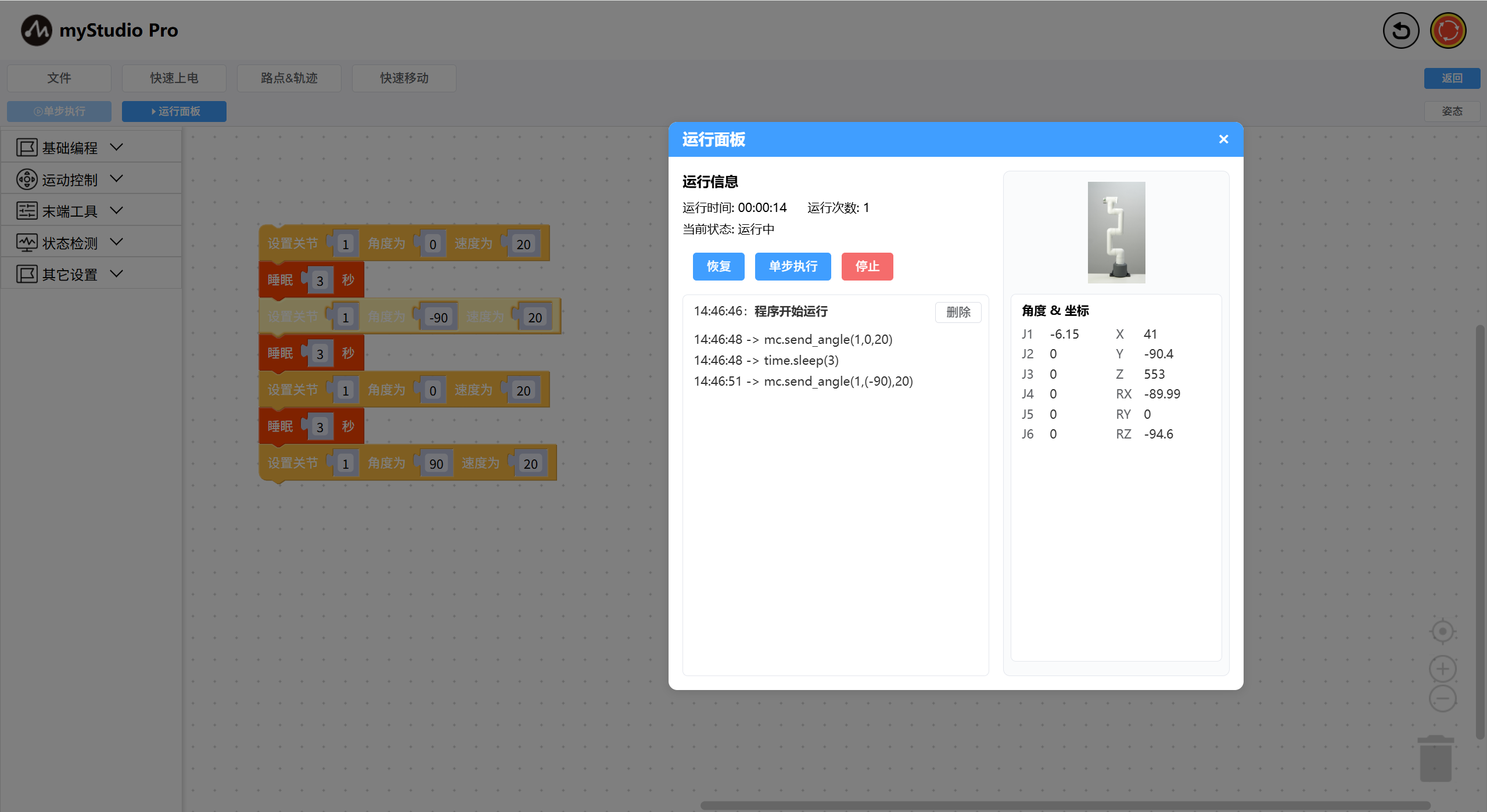
程序已暂停。出现下一条要执行的指令time.sleep(3)
此时:
- 如果点击
恢复按钮,程序将会自动往下执行; - 如果点击
单步执行按钮,程序会执行time.sleep(3)指令,再次点击单步执行时,程序会执行下一条指令,即mc.send_angle(1,-90,20); - 如果点击
停止按钮,程序会被终止;
至于接下来如何操作,由您自己决定吧!
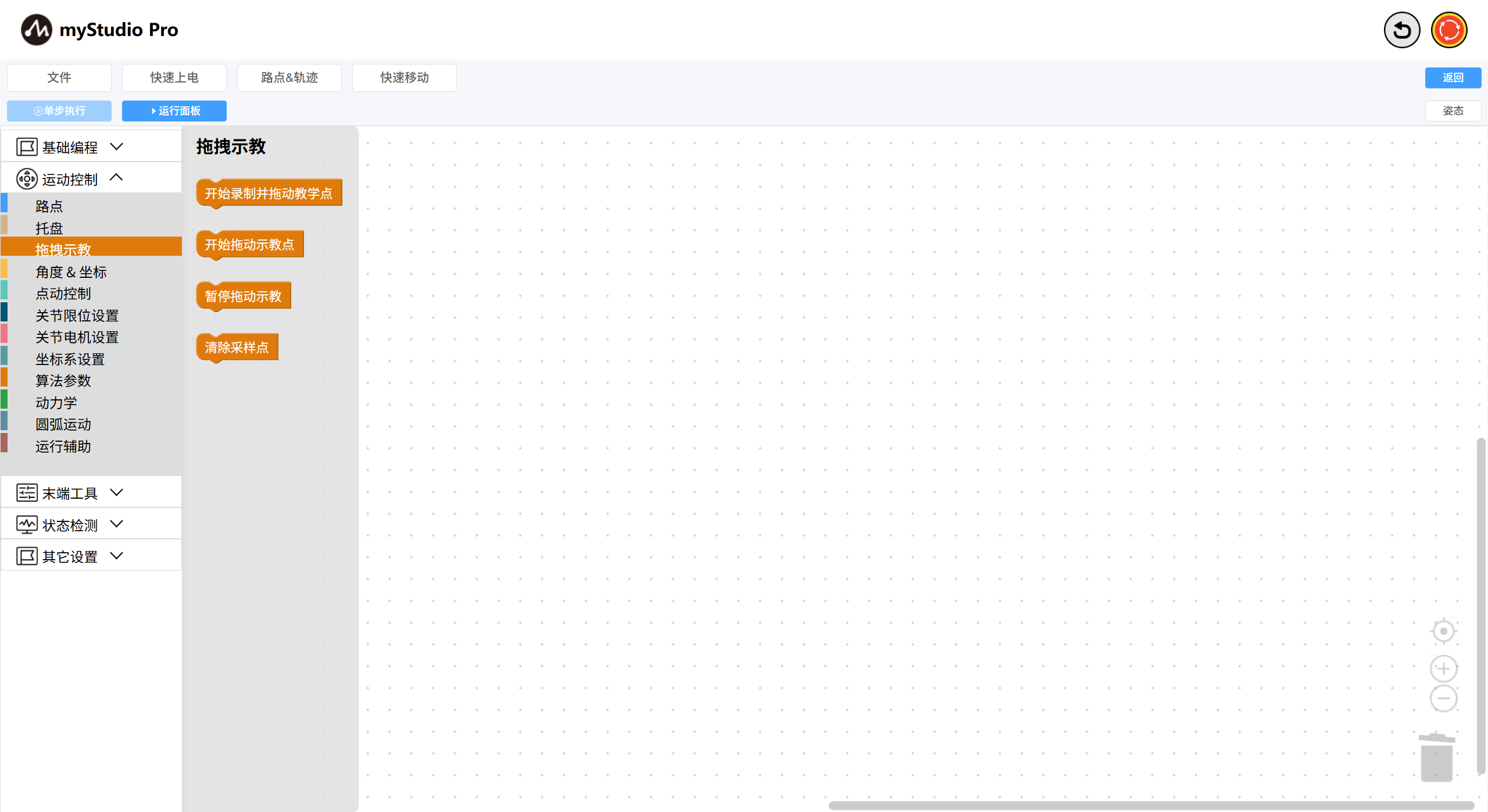
8 拖动示教的使用
本章介绍如何使用myBlockly中的拖动示教功能。
是指在操作者的牵引下(牵引末端或者牵引某一个操作臂),操作臂会沿着人的作用力方向移动。
这一功能可以很方便地进行规划轨迹(对过程轨迹精度不高的任务),以便操作者记录和复现轨迹,而无需人工编程,降低了对操作者的门槛,提高了效率。
API display
小案例
我们将会实现这样一个效果:随意拖动机械臂做一些动作,拖动结束后,机械臂将会执行刚才的动作。相当于轨迹的录制和播放。
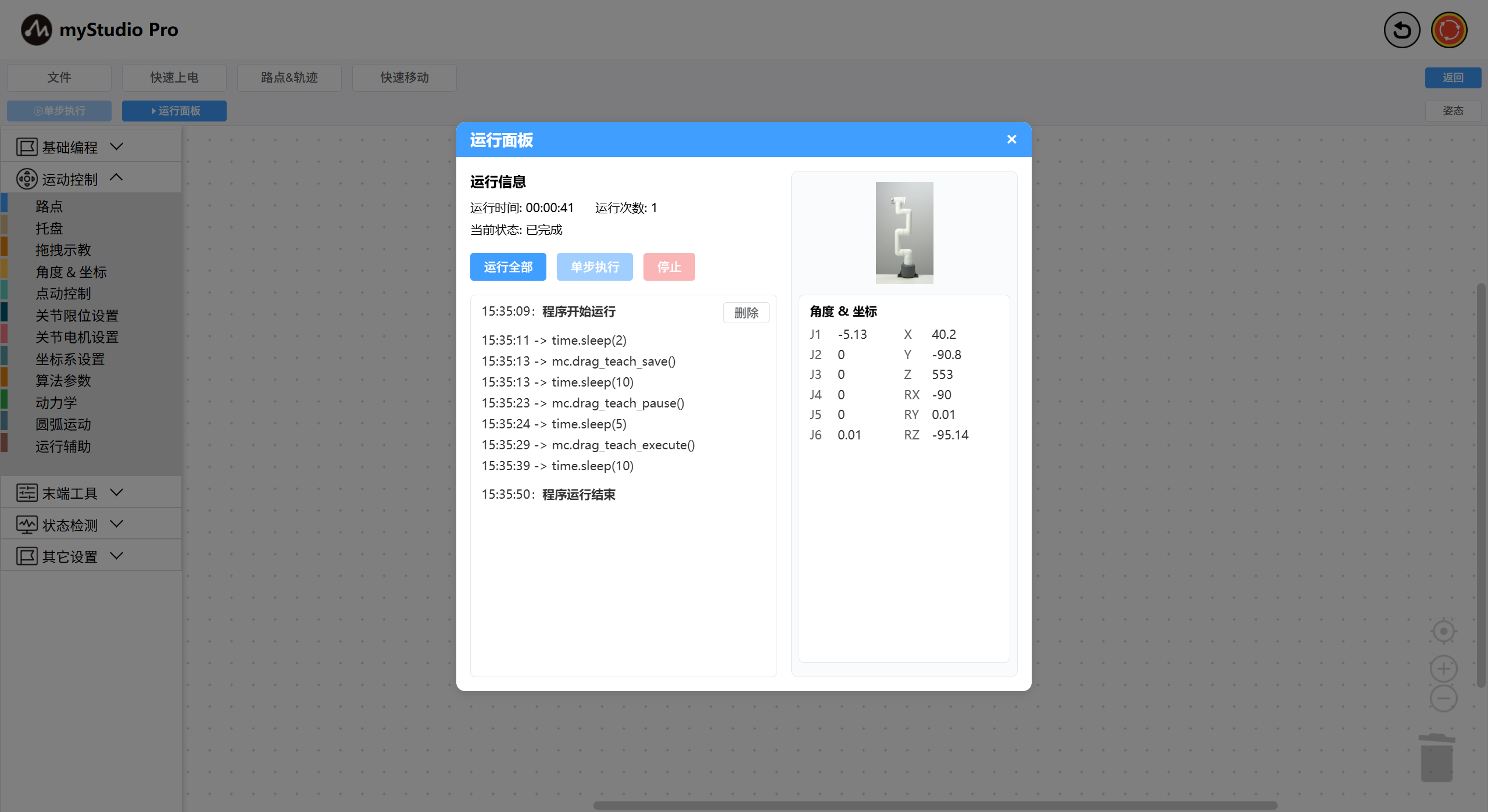
完整代码如下:
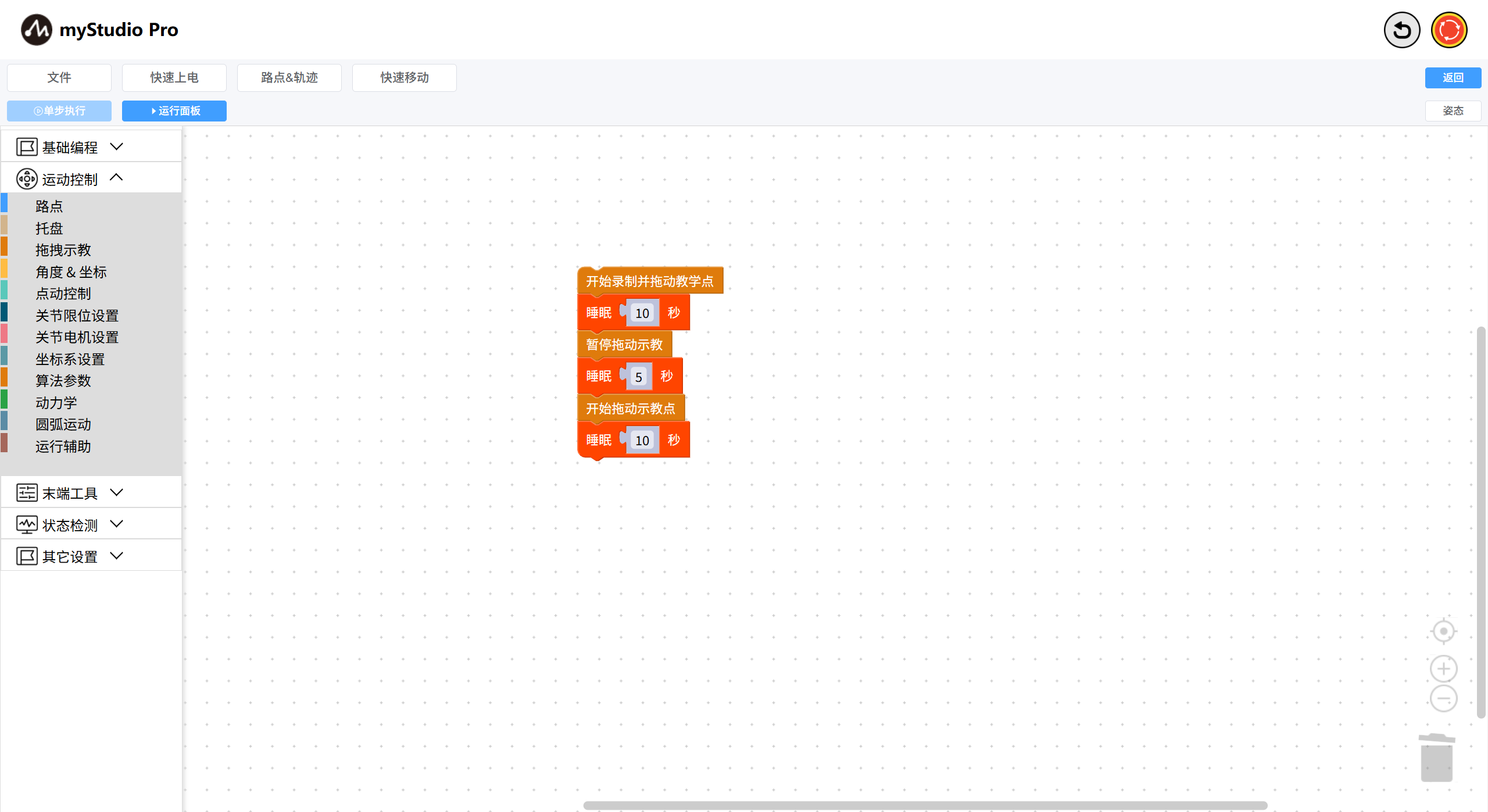
代码解释:
- 录制轨迹:执行该积木块后,机械臂关节刹车放松,机械臂现在可以被拖动
- 等待 10 秒(相当于录制了10 秒钟)
- 暂停录制:机械臂关节刹车锁紧,不可被人力拖动
- 等待 10 秒
- 播放轨迹:机械臂开始执行刚才录制的轨迹
- 等待 10 秒(相当于播放刚才录制的 10 秒钟轨迹)
9 夹爪的使用
本章介绍如何使用myBlockly控制连接机械臂的F100力控夹爪。
API display
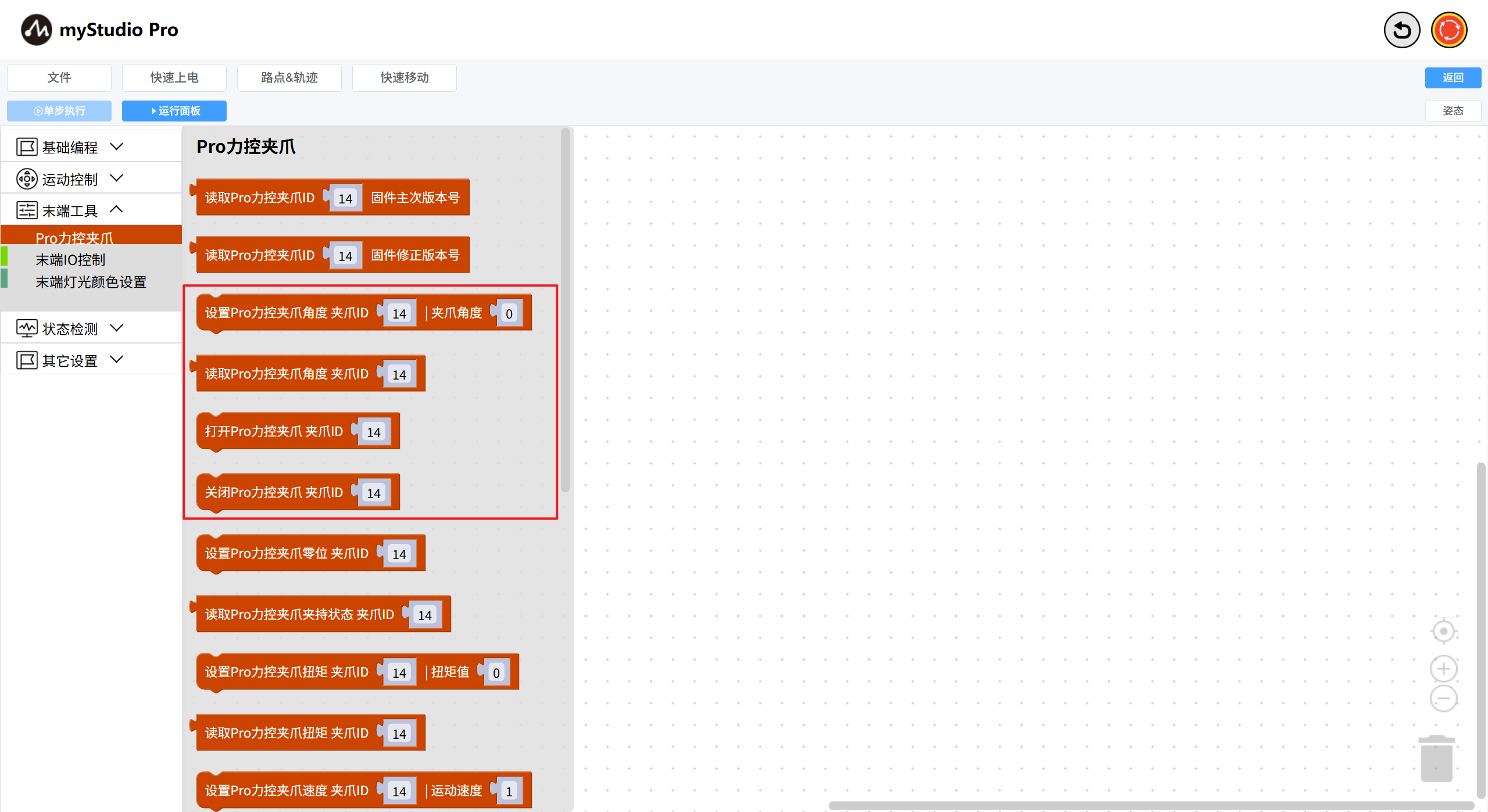
我们将用到以下积木块
1: 设置F100力控夹爪角度:使夹爪以指定的角度进入指定的状态(张开或闭合)
参数介绍:
该积木块有两个可以调整的参数:
- 夹爪ID参数:默认14
- 夹爪角度参数:表示需要设置的角度,取值范围0~100
2: 读取F100力控夹爪角度:读取当前夹爪的角度值
该积木块有一个可以调整的参数:
- 夹爪ID参数:默认14
小案例
图形代码如下:
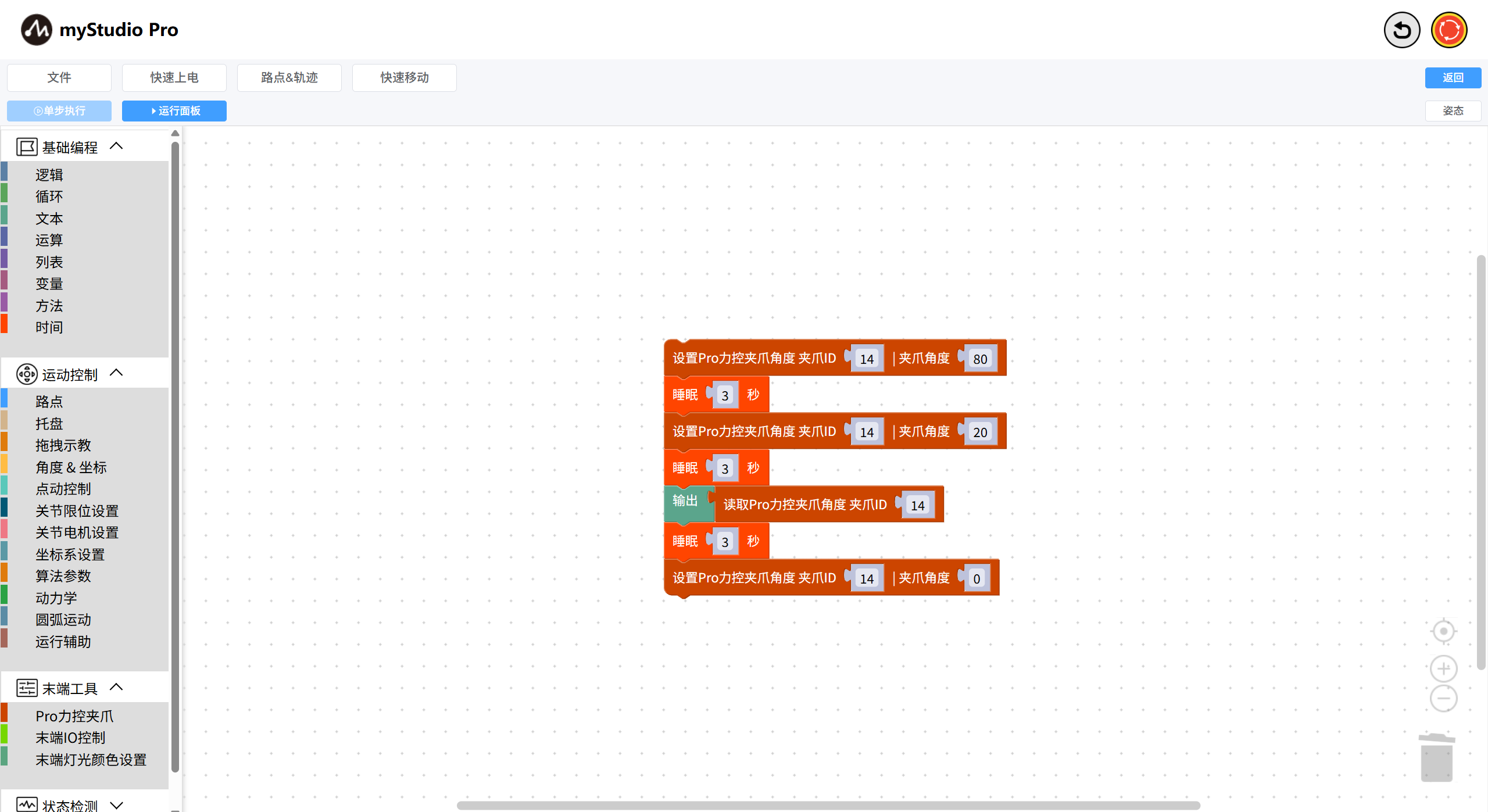
- 代码的执行效果:
- 控制F100力控夹爪到达值为
80的位置
- 控制F100力控夹爪到达值为
- 等待 3 秒
- 控制F100力控夹爪到达值为
20的位置
- 控制F100力控夹爪到达值为
- 等待 3 秒
- 读取当前F100力控夹爪的角度值
- 等待 3 秒
- 控制F100力控夹爪到达值为
0的位置
- 控制F100力控夹爪到达值为
注意:
如果您无法从以上的示例中控制夹爪,请确保您的F100力控夹爪通信方式是modbus协议控制。
设置完成后,然后再次运行小案例代码。
10 路点
本章介绍如何使用路点功能来控制机械臂。
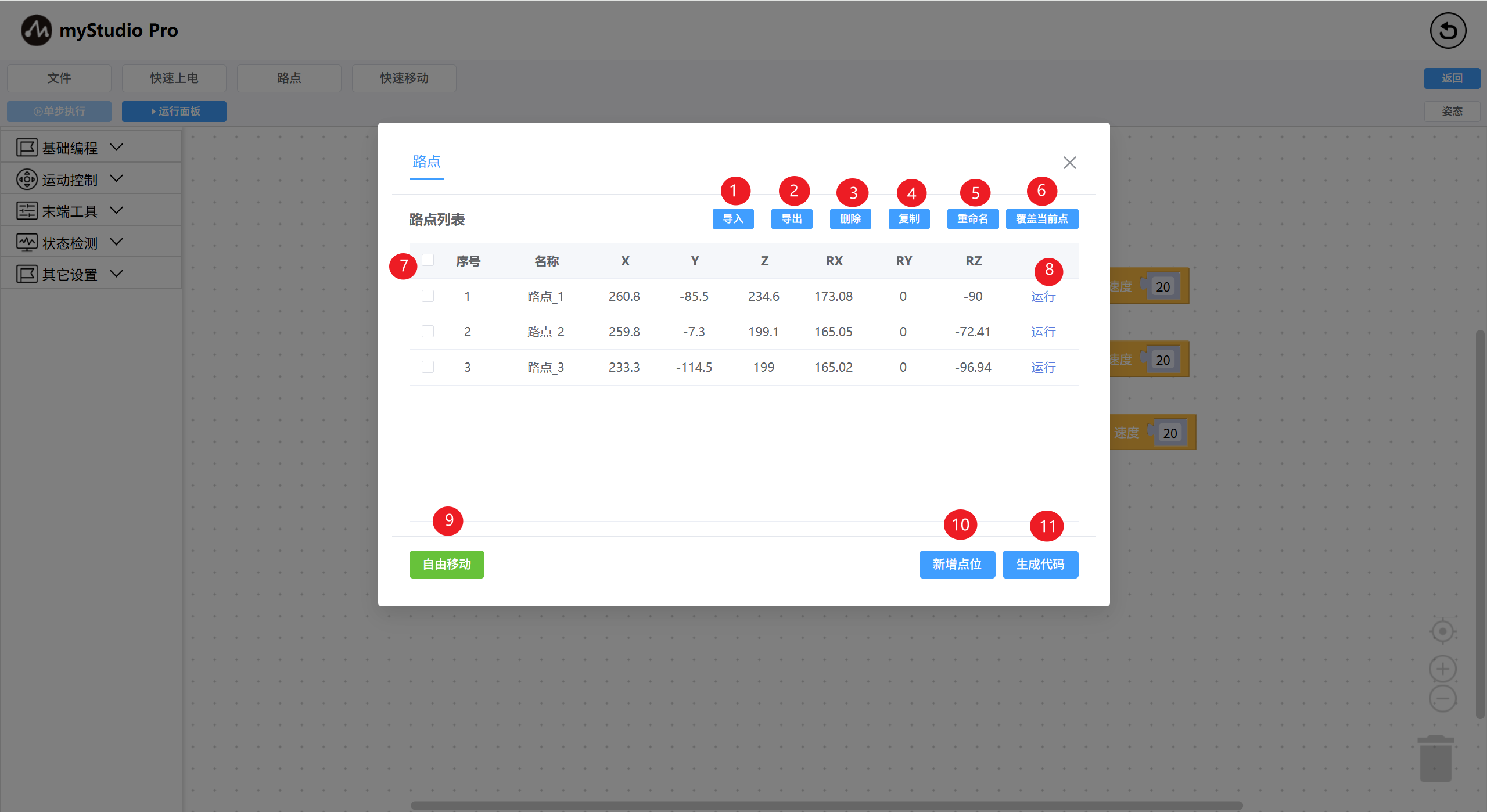
功能描述:通过录入多个路点数据(机械臂的关节和坐标)信息,快速控制机械臂到达每个路点的位置。打开路点列表页面,长按末端按钮,放松机械臂,手动调整机械臂姿态,点击新增点位,可以添加一条路点数据。
| 序号 | 说明 |
|---|---|
| 1 | 点击“导入”按钮,可以把之前保存好的路点信息json文件导入进来。 |
| 2 | 点击“导出”按钮,可以把路点信息全部导出合成一个json文件。 |
| 3 | 点击“删除”按钮,可以把当前路点列表中所有选中的路点进行删除操作。 |
| 4 | 点击“复制”按钮,可以把当前所有选中的路点进行坐标信息复制操作。 |
| 5 | 点击“重命名”按钮,可以把当前所有选中的路点进行路点名重命名操作。 |
| 6 | 点击“覆盖当前点”按钮,可以把当前机械臂坐标信息快速覆盖所有选中路点的坐标信息。 |
| 7 | 列表数据勾选列,功能3-6以该功能为前提。 |
| 8 | 点击“运行”按钮,机械臂会运动到当前所录的路点位置 |
| 9 | 点击“新增点位”按钮,会录入当前机械臂的坐标信息 |
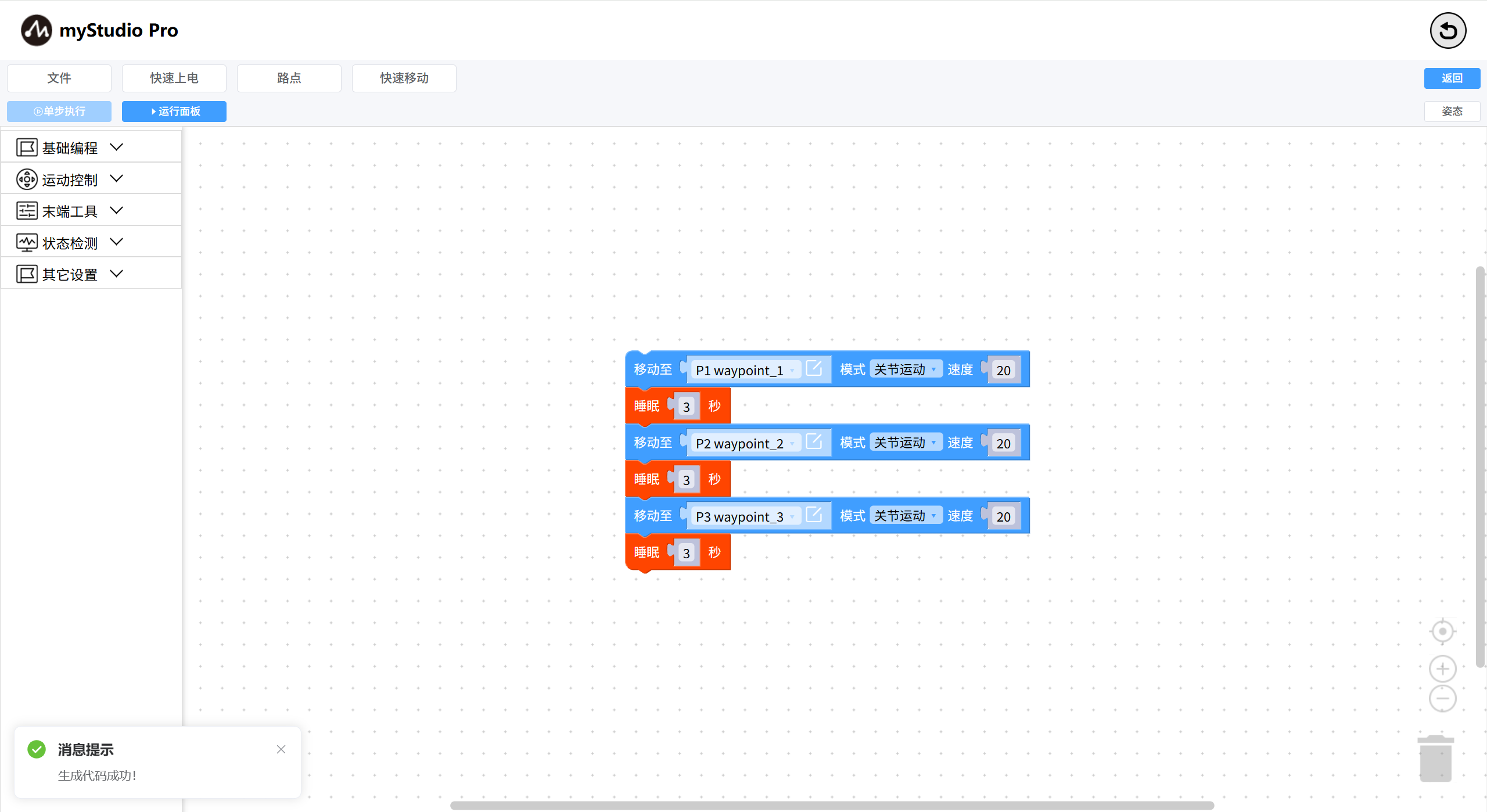
| 10 | 点击“生成代码”按钮会快速生成路点积木块到blockly程序编码区 |
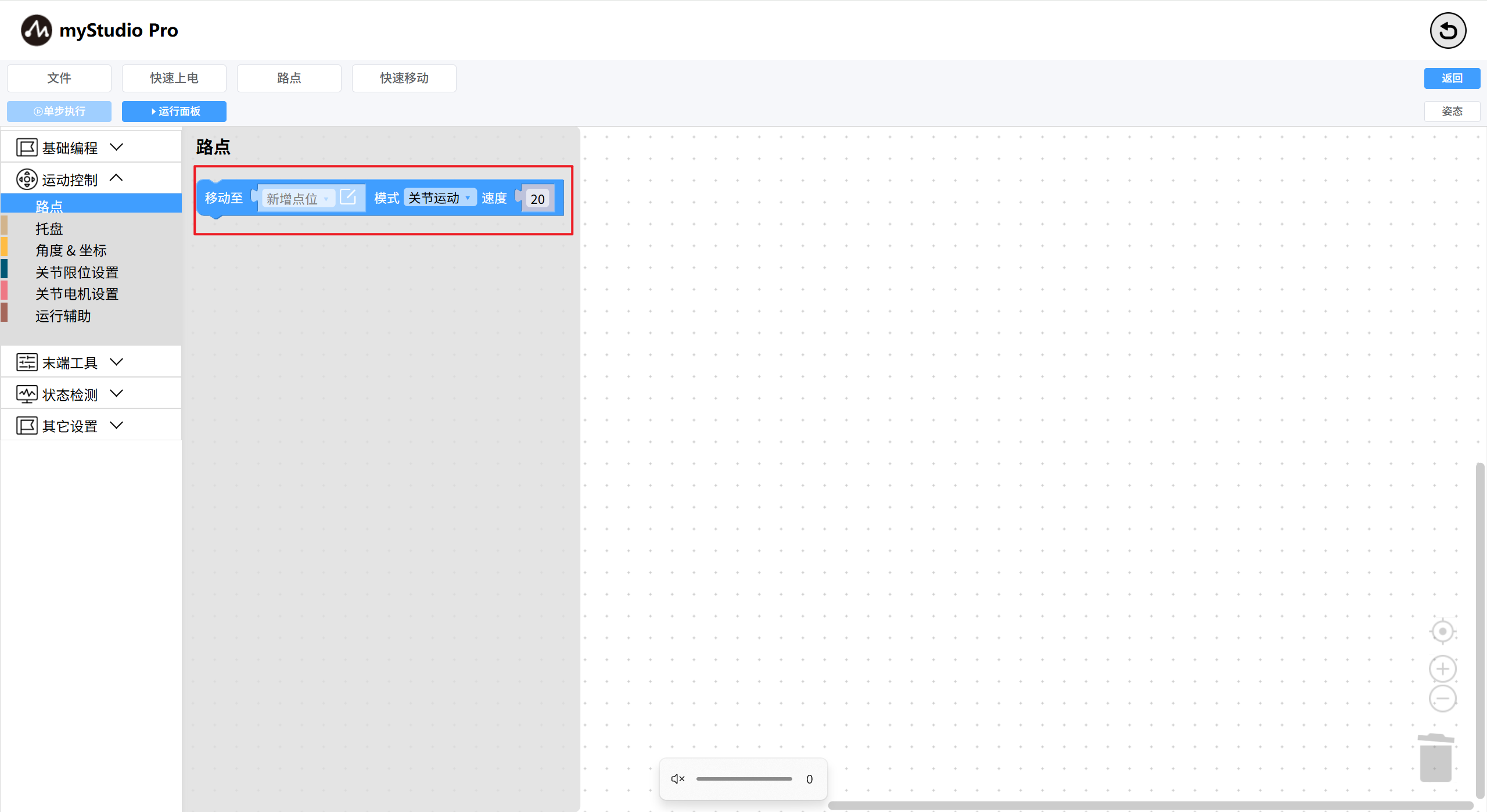
在myBlockly中选择路点积木块,加入到程序编码区。或者使用路点列表中的生成代码按钮,会在工作区最后一个积木块上拼接生成的路点积木块。
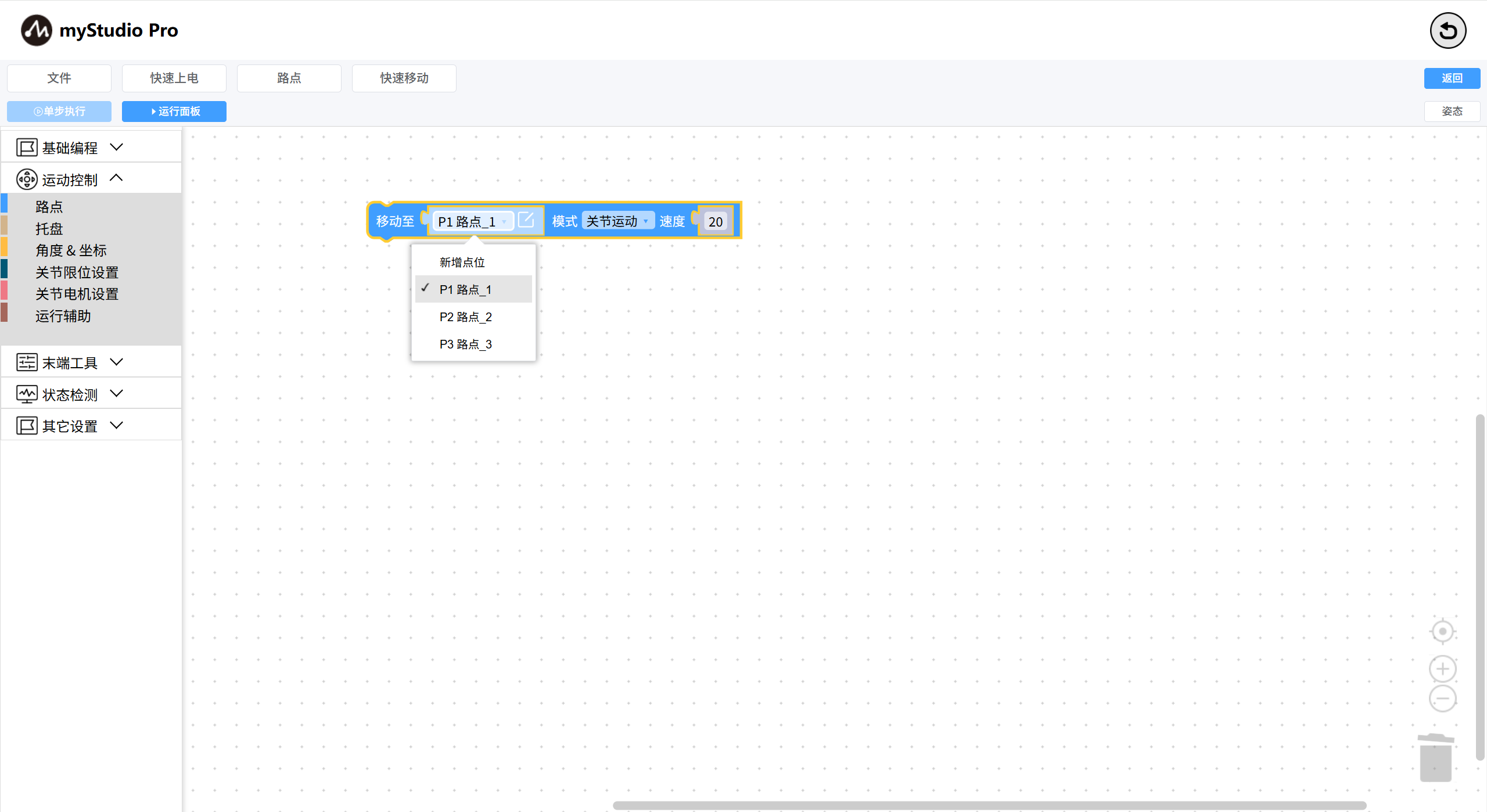
路点积木块关联路点列表中的数据,选择路点列表中任意路点进行关联。
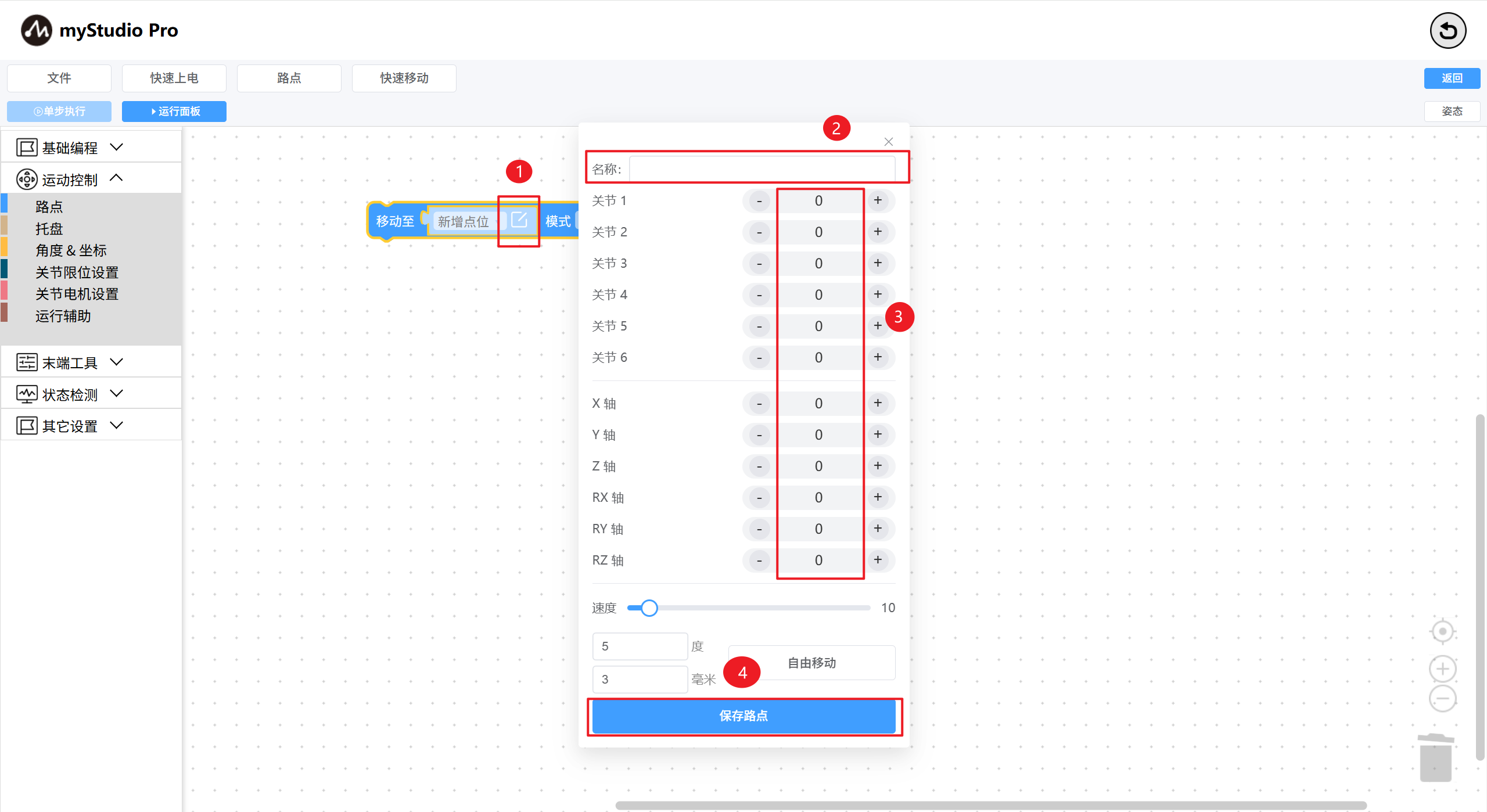
路点积木块新增点位信息。选择新增点位,点击编辑图标打开新增路点弹框,这时会默认自定义路点名字,通过+或者-进行调整好路点信息,点击保存路点按钮,即可添加路点数据。

此外,路点积木块可对运动的模式进行修改,关节运动模式:以当前路点的关节信息进行运动,直线运动模式:以当前路点坐标信息进行运动。
| 序号 | 说明 |
|---|---|
| 1 | 选择路点,点击编辑图标后,会打开路点编辑弹框 |
| 2 | 输入路点名称 |
| 3 | 显示机械臂的关节和坐标数据,通过按钮左边(-)和右边(+)按钮进行调整路点数据 |
| 4 | 点击保存路点,可以新增或者修改路点数据 |
11 轨迹
介绍如何使用轨迹功能来控制机械臂,实现拖动示教。
功能描述:通过录制多条轨迹数据(机械臂的关节)信息,快速控制机械臂到达每一个轨迹点位置。打开轨迹列表页面,点击录制轨迹按钮,机械臂各关节将放松,手动拖动机械臂录制轨迹,点击停止录制等待轨迹保存,保存完成即轨迹录制完成,录制成功的轨迹会自动在测试空间生成一个轨迹类型文件(关于文件功能相关操作,请点这里))。
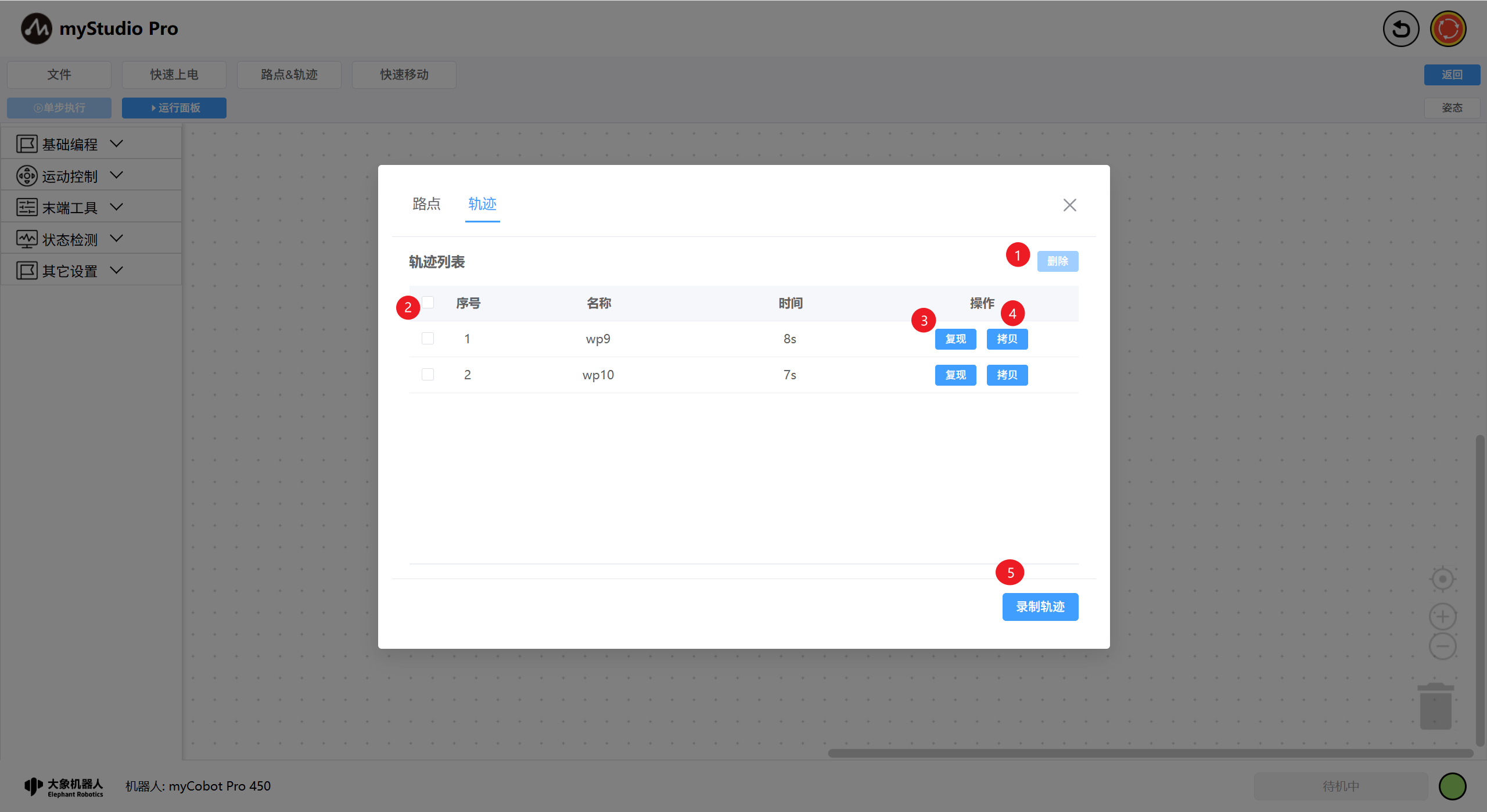
| 序号 | 说明 |
|---|---|
| 1 | 先选择需要删除的轨迹,至少勾选一条数据按钮可用,点击删除即可将所有勾选的轨迹删除。 |
| 2 | 列表数据勾选列,功能1以该功能为前提。 |
| 3 | 点击“复现”按钮,可以对该轨迹进行复现操作。 |
| 4 | 点击“拷贝”按钮,可以把当前轨迹拷贝至测试文件工作区。 |
| 5 | 点击“录制轨迹”按钮,机械臂会二次确认是否进行轨迹录制操作,确认后可开始录制(最长60s,超过将自动停止录制)。 |
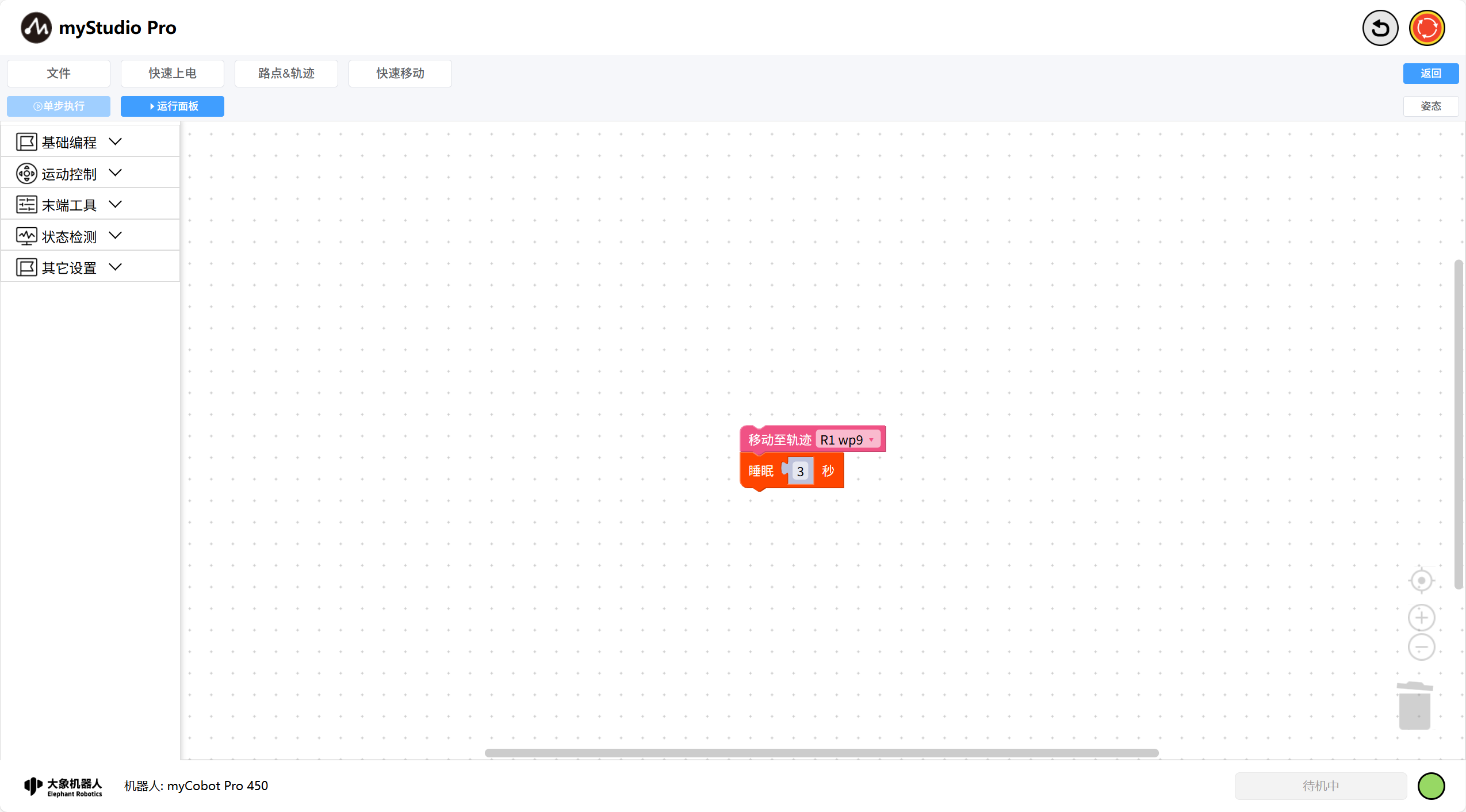
再myBlockly中选择轨迹积木块,加入到程序编程区。在工作区中点击轨迹积木块的下拉菜单可选择当前轨迹列表页面中的数据。
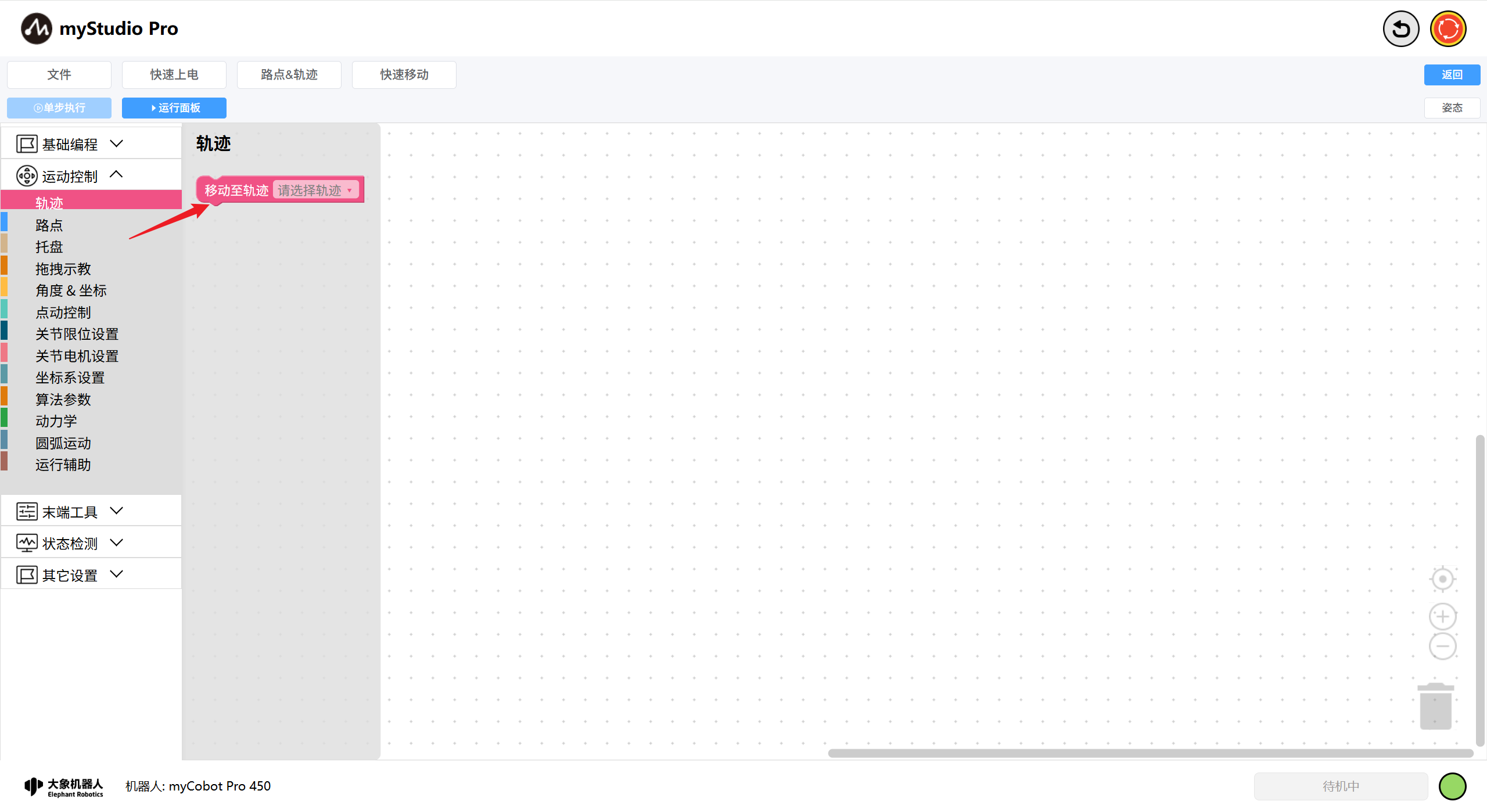

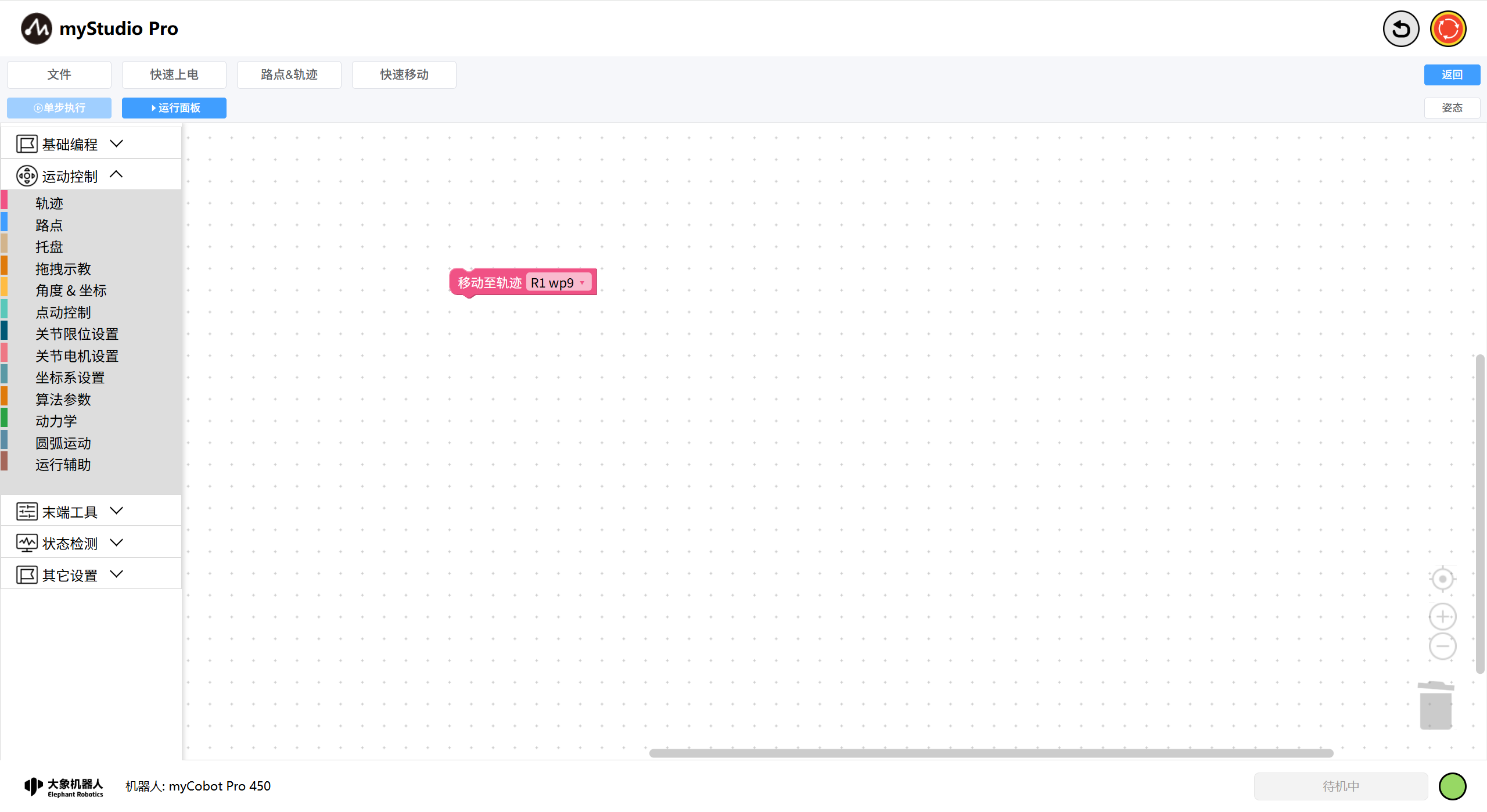
选择完成后打开运行面板,点击运行全部,可以积木块运行的方式对该轨迹进行复现。
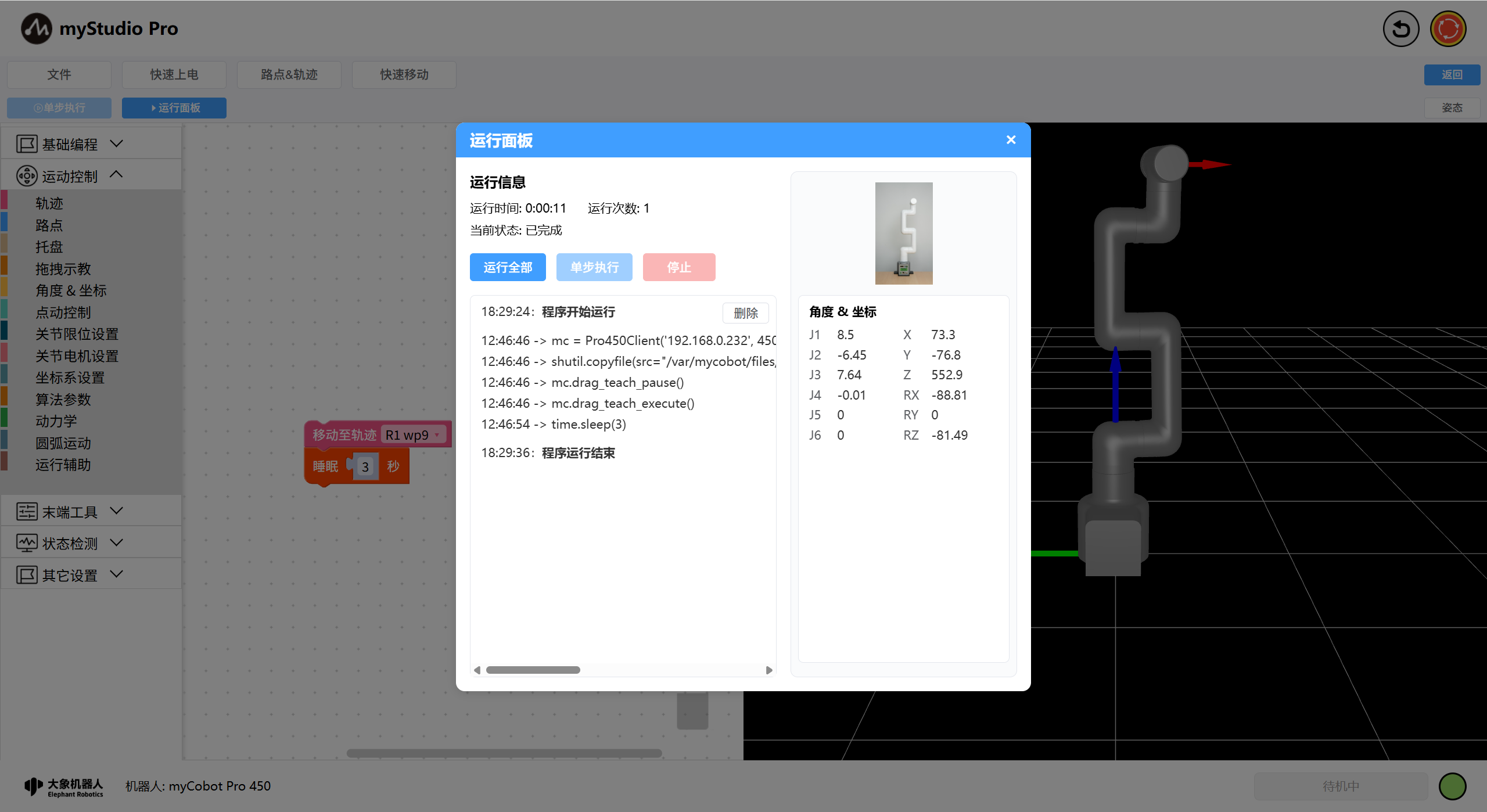
程序运行完成后,轨迹复现完成。当然,您也可以配合其他积木块进行更复杂的程序编程。
12 文件管理
介绍如何使用文件管理模块功能。
功能描述:通过文件管理模块,可以方便的对不同文件空间下的文件进行保存、导入、导出等操作。文件列表打开方式有两种,首页-打开文件或myBlockly页文件操作菜单-打开选项,即可打开文件管理列表,同时加载您保存好的文件内容包括工作区、路点、轨迹文件(关于如何保存工作区,请点这里)。
| 序号 | 说明 |
|---|---|
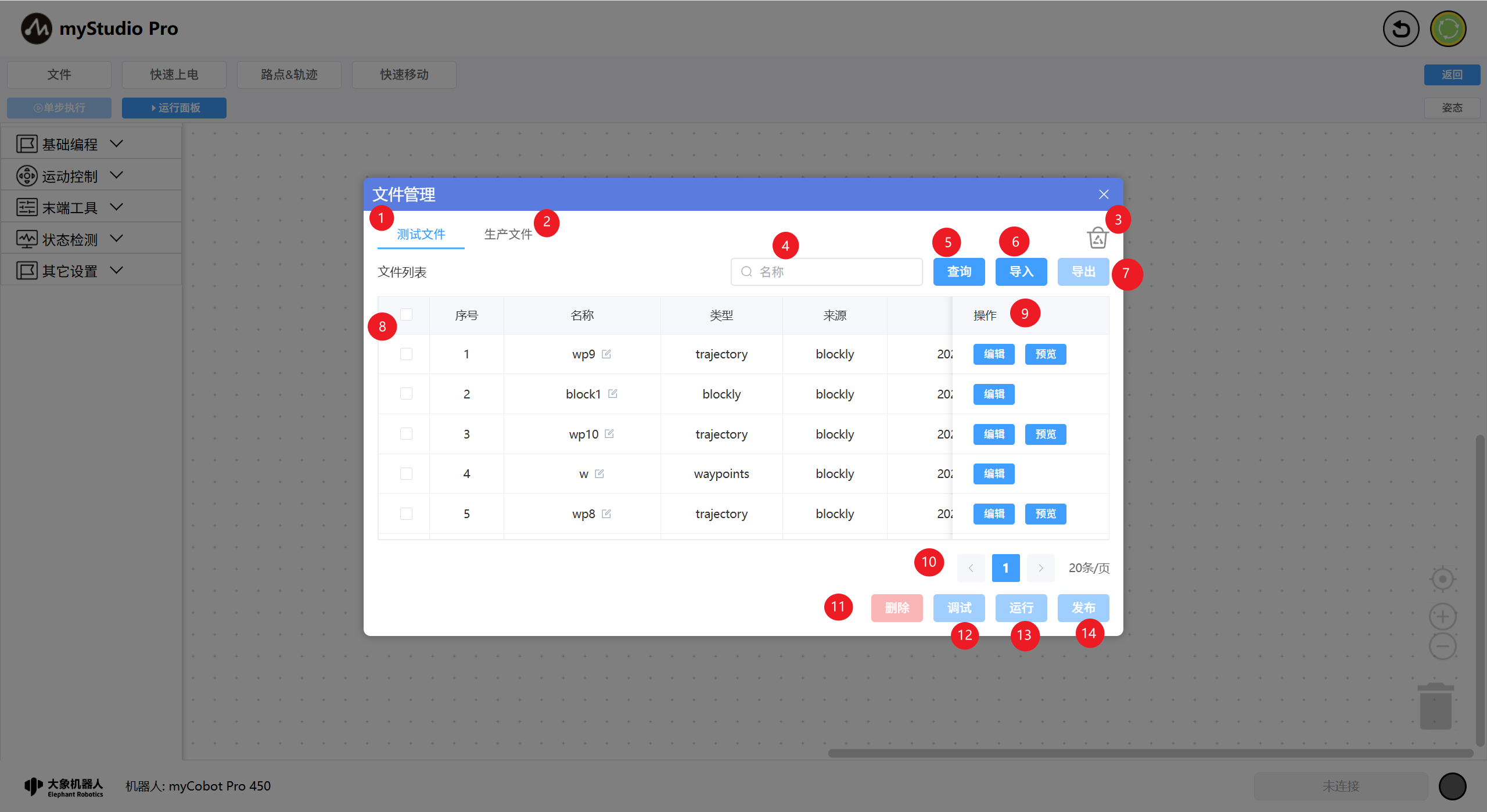
| 1 | 测试文件空间,切换到该选项会分页查询所有测试文件。 |
| 2 | 生产文件空间,切换到该选项会分页查询所有生产文件。 |
| 3 | 回收站文件空间,切换到该选项会分页查询所有回收站文件(测试/生产空间删除的文件会进入到回收站,30天自动回收删除)。 |
| 4 | 查询条件输入框,目前仅支持根据文件名进行模糊查询,可直接enter查询或点击功能5按钮。 |
| 5 | 查询按钮,点击该按钮可根据输入框内容进行分页查询。 |
| 6 | 导入按钮,点击该按钮可对当前设备下的文件进行导入操作。 |
| 7 | 导出按钮,默认禁用选择单个文件时启用,点击该按钮可对选择的文件进行导出操作。 |
| 8 | 列表数据勾选列,功能7、11-14以该功能为前提。 |
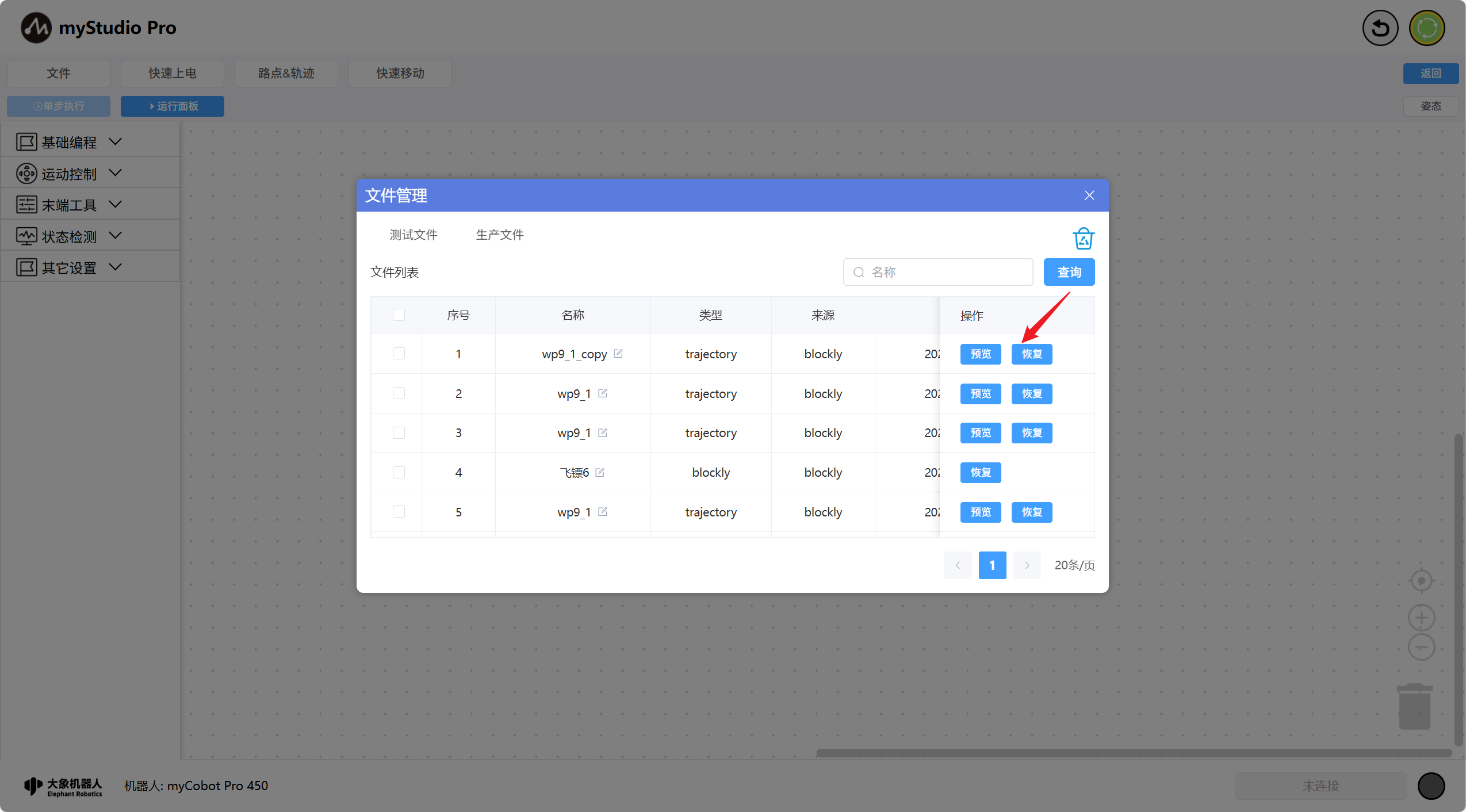
| 9 | 单文件操作按钮,包括以下功能按钮:编辑-将文件内容加载到工作区,预览-仅适用轨迹文件,3D模型对轨迹点位进行模拟运行,拷贝-将生产空间文件拷贝到测试空间,恢复-回收站空间文件恢复到测试空间。 |
| 10 | 分页按钮,当前空间超过规定数量时可进行分页操作 |
| 11 | 批量操作按钮,删除-将勾选的文件删除到回收站, |
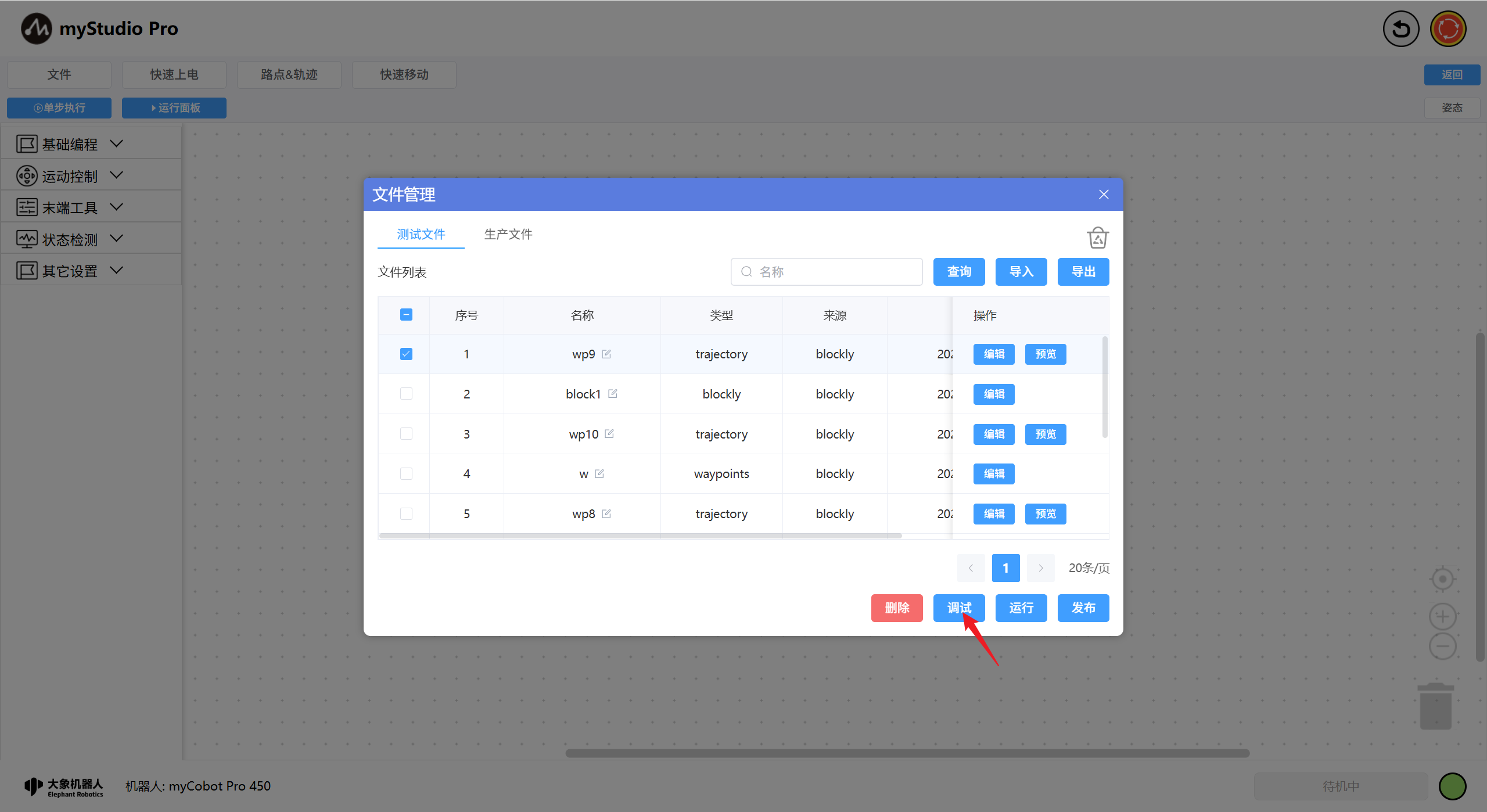
| 12 | 单文件操作按钮,勾选一个文件点击该按钮则会将文件内容加载到工作区并自动打开调试面板 |
| 13 | 单文件操作按钮,勾选一个文件点击该按钮则会将文件内容加载到工作区并自动打开调试面板,并可在面板中设置文件的运行循环次数-无限循环或次数循环 |
| 14 | 单文件操作按钮,勾选一个文件点击该按钮则会将文件发布到生产空间 |
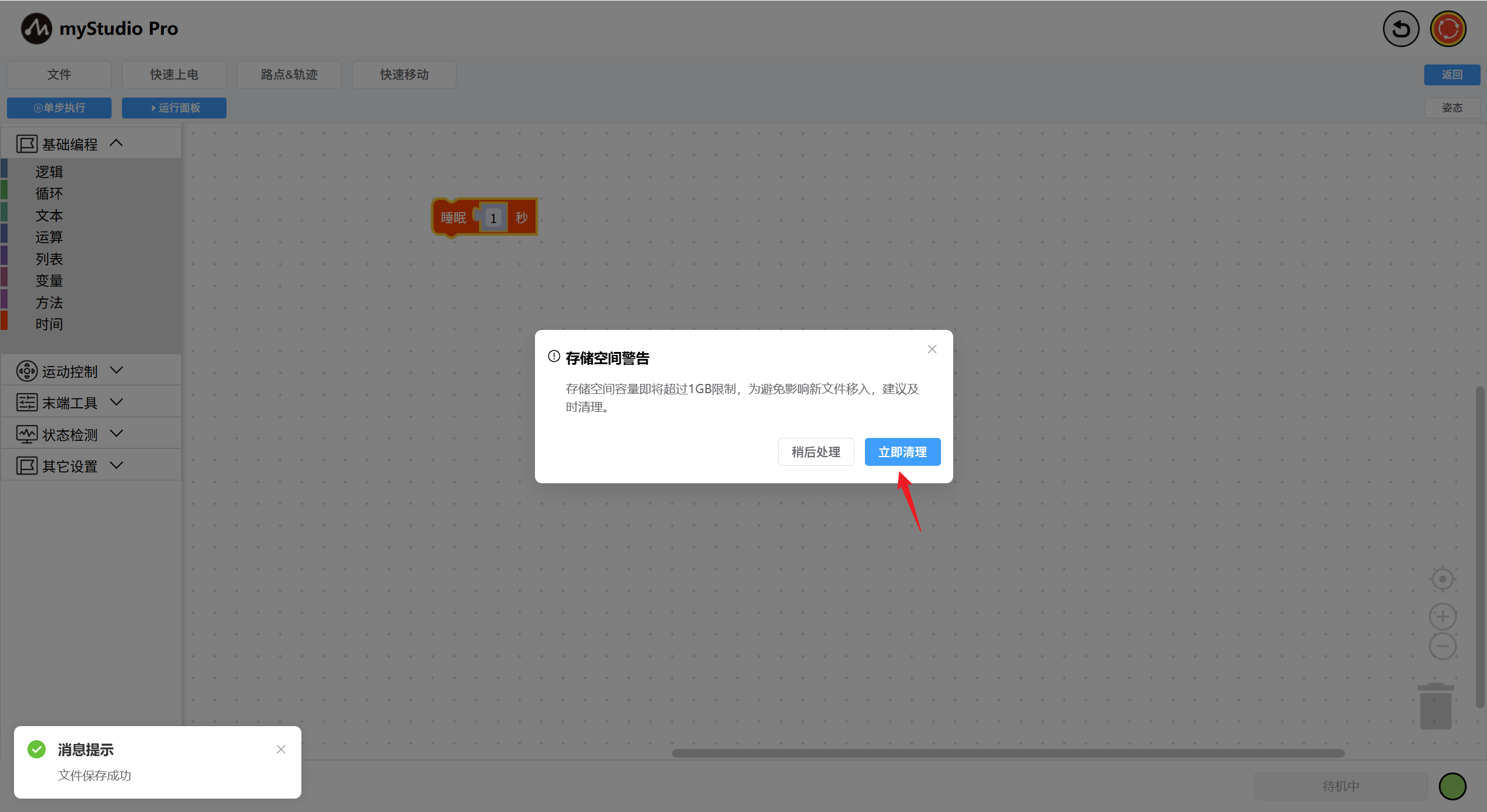
注:文件的容量有1GB大小限制,当文件管理操作检测到空间大于0.9GB且小于1GB时,会有容量空间警告弹窗提示,此时您可以点击立即清理按钮,并对不再使用的文件进行删除处理,以释放容量空间。
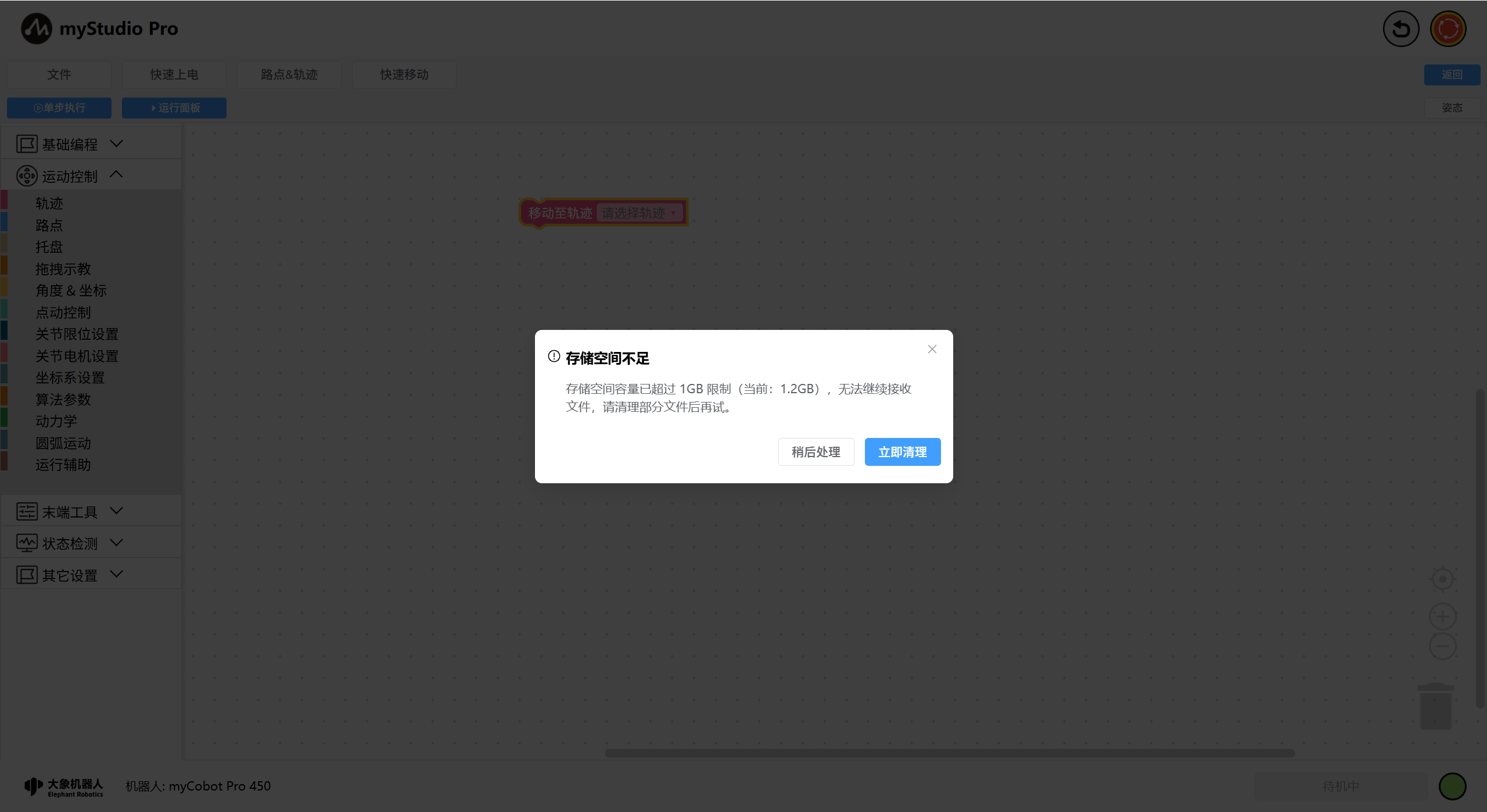
当检测到容量空间已满时,会有存储空间不足弹窗提示,文字信息中会展示目前文件空间容量,此时您可以点击立即清理按钮,对不再使用的文件进行删除处理,以释放容量空间,保证文件管理相关功能操作的正常使用。
查询
默认查询所有文件,可输入文件名进行模糊查询,当输入框内有内容时则会基于当前的文件空间,根据内容进行查询,查询成功会有信息显示。

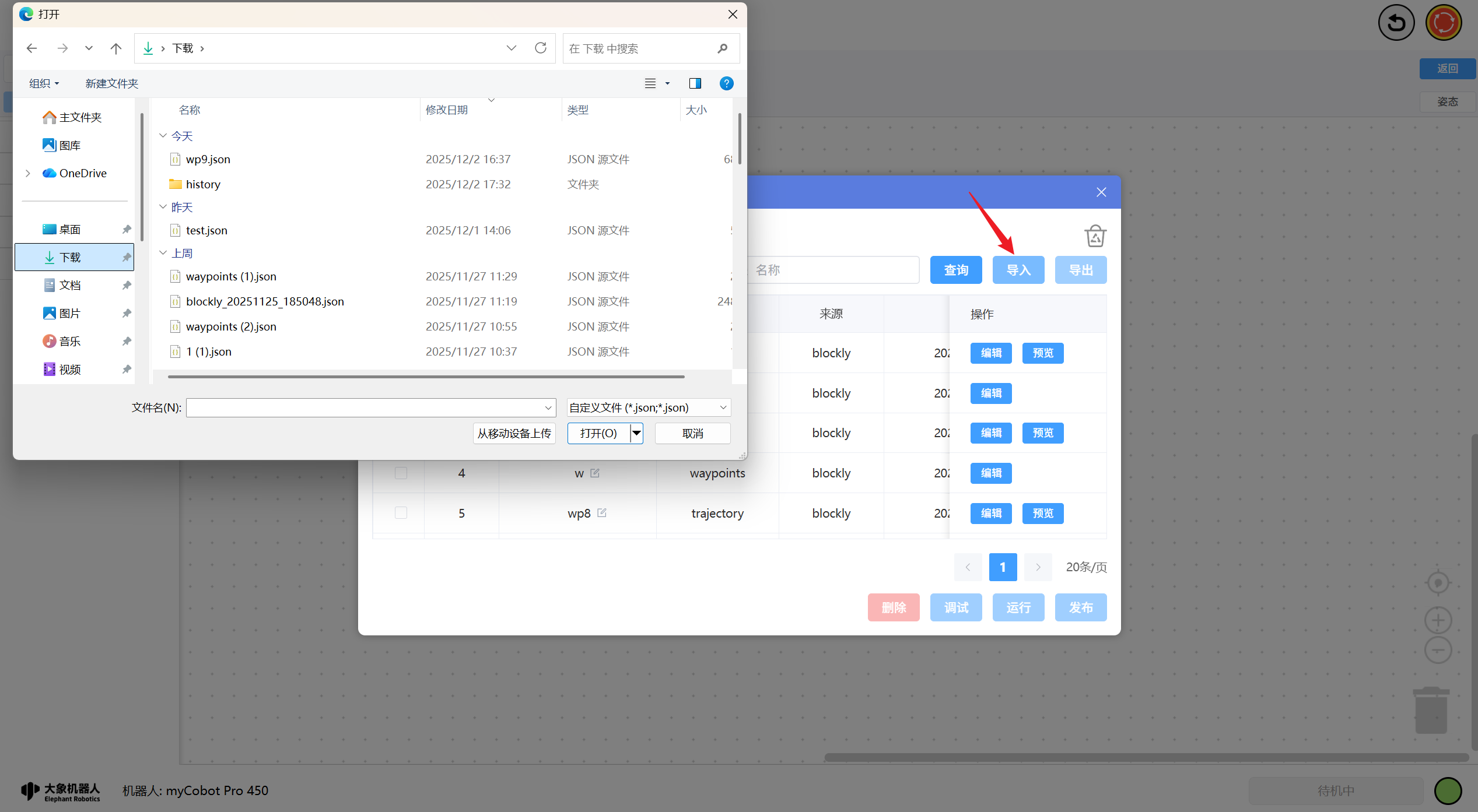
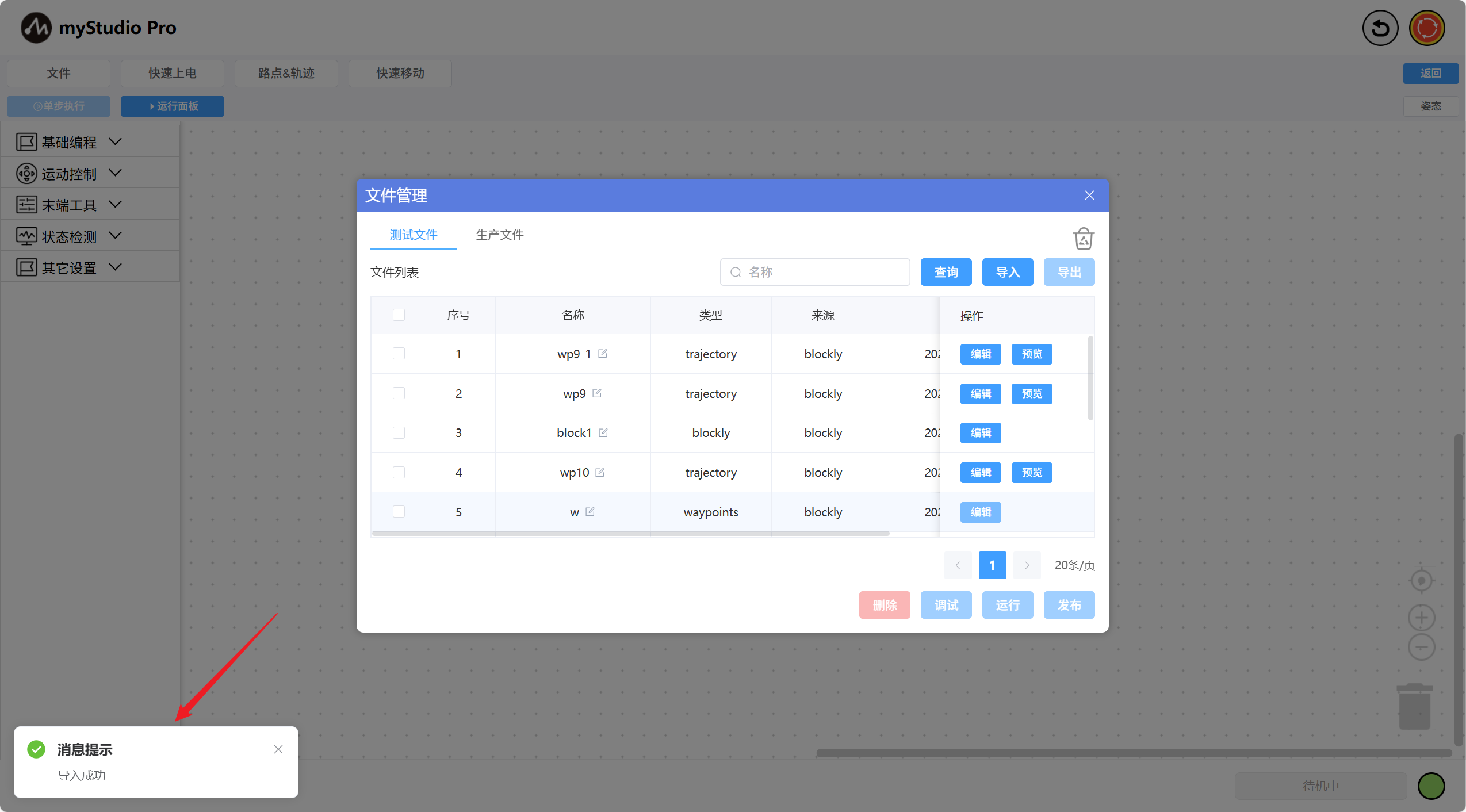
导入
点击导入按钮,选择需要导入的文件,点击确定即可。
注意:选择导入的文件,必须是从myStudio Pro中导出的文件,否则会出现
导入失败/导入成功但无法编辑的情况。
点击导入按钮,选择需要导入的文件,点击确定即可。
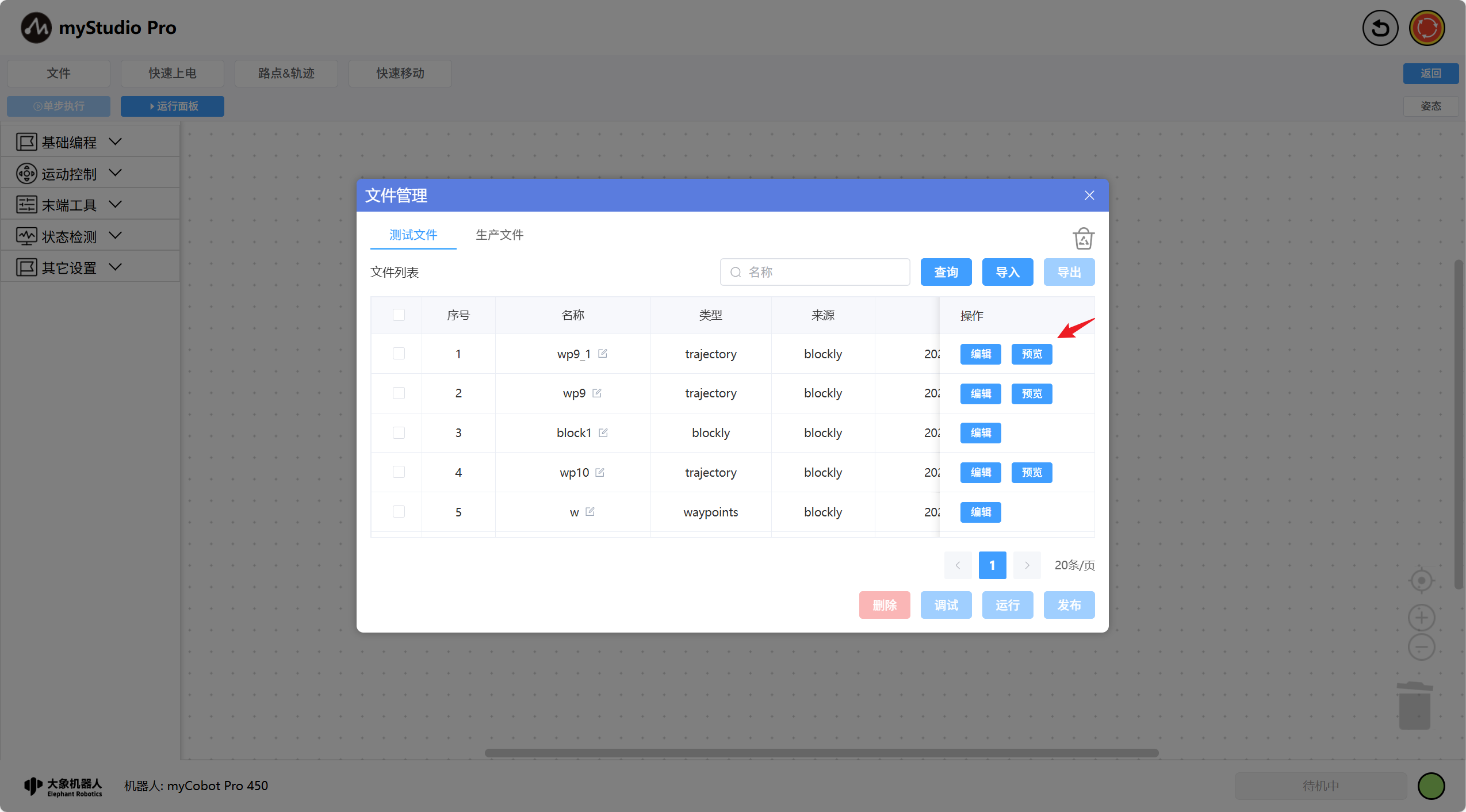
编辑
点击编辑按钮,将文件内容加载到工作区。
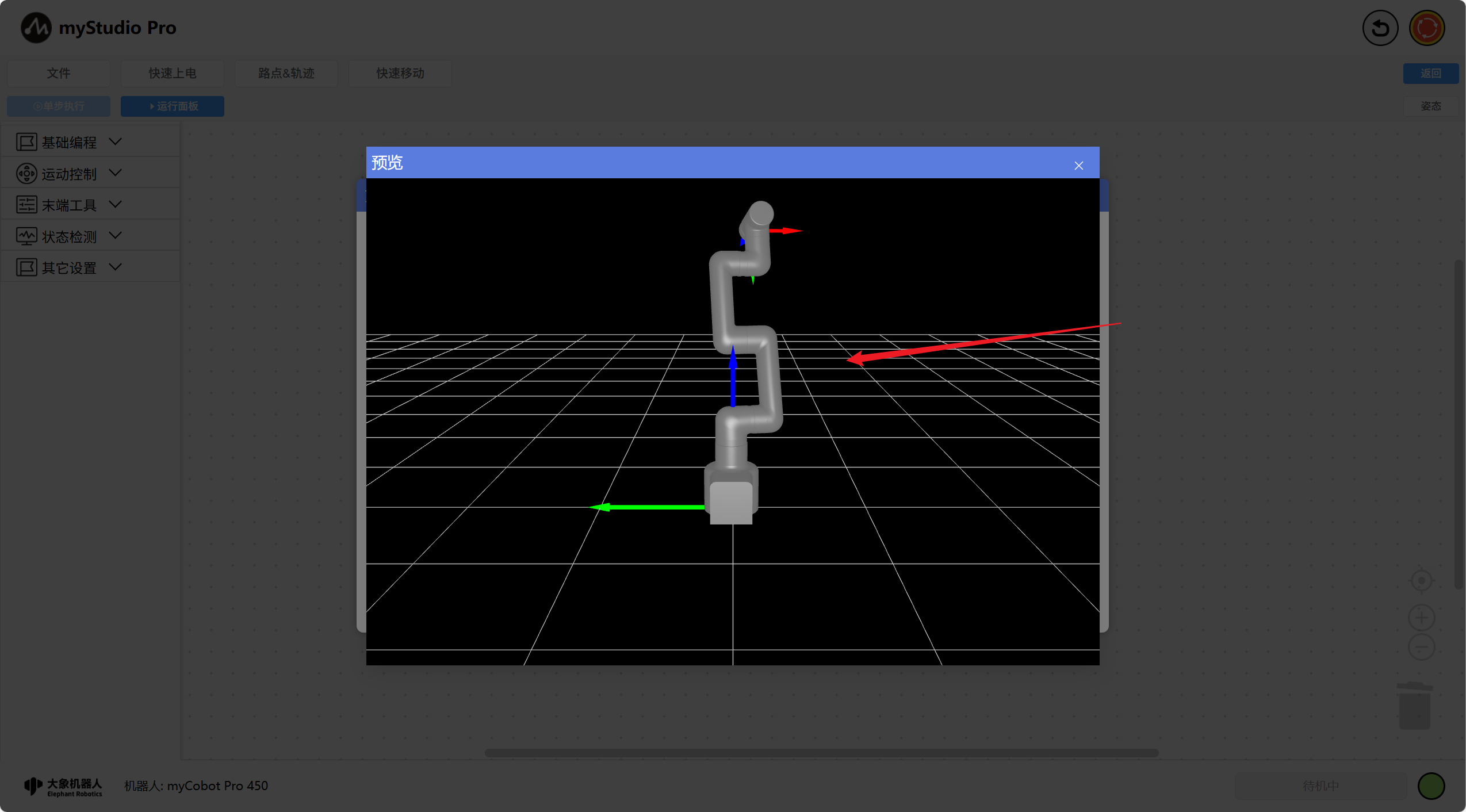
预览
点击预览按钮,将打开预览面板3D模型将基于轨迹文件实际的点位进行模拟运动。
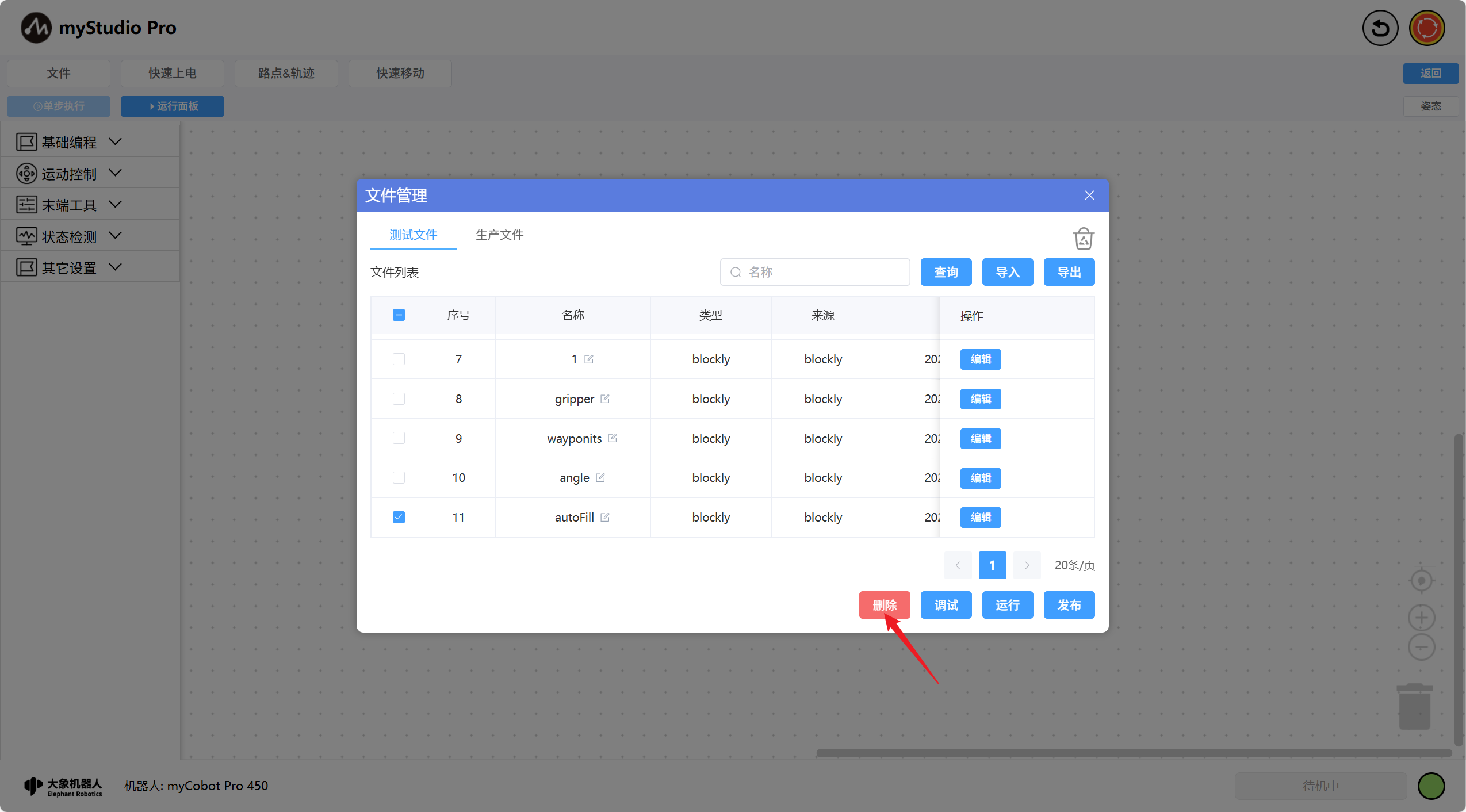
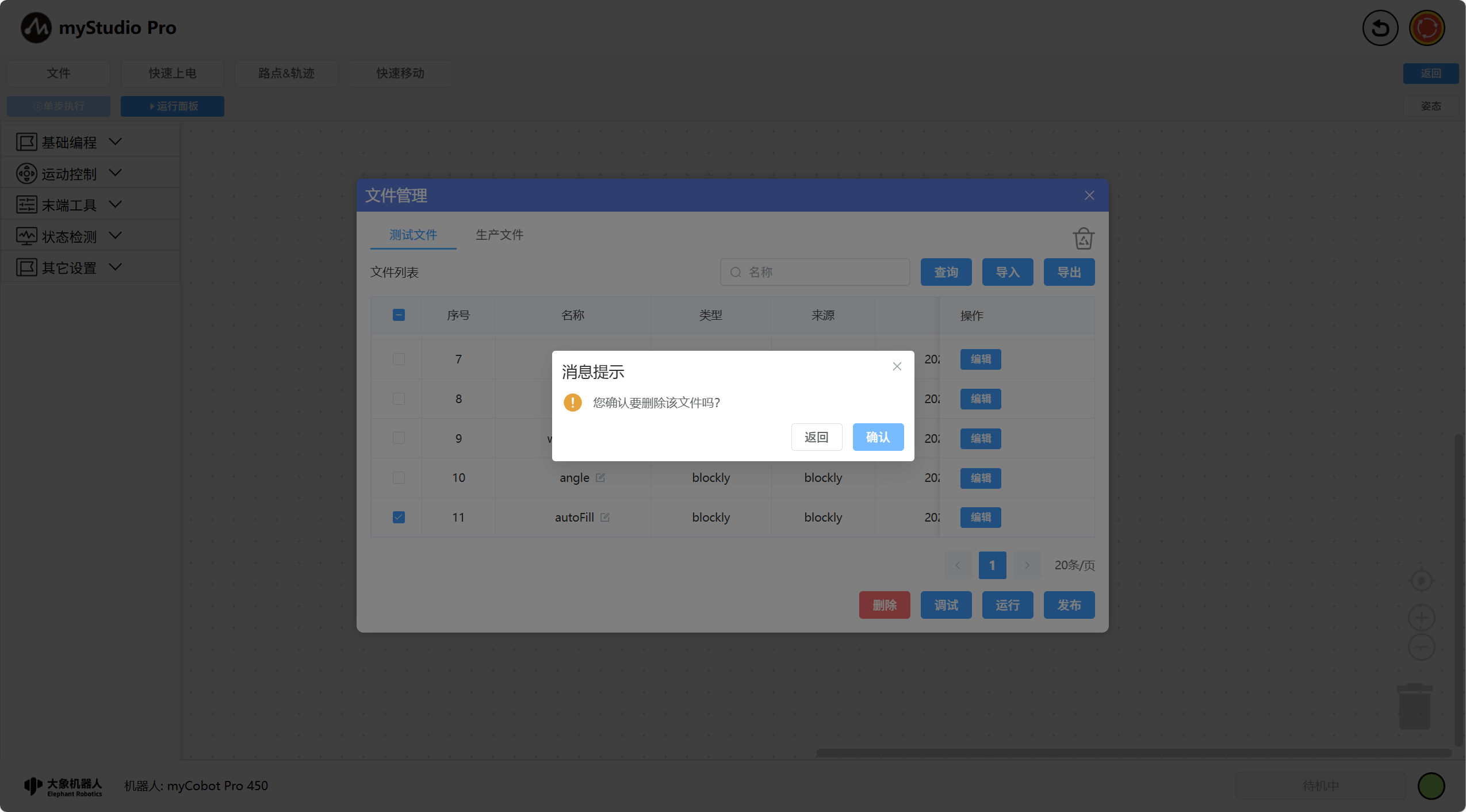
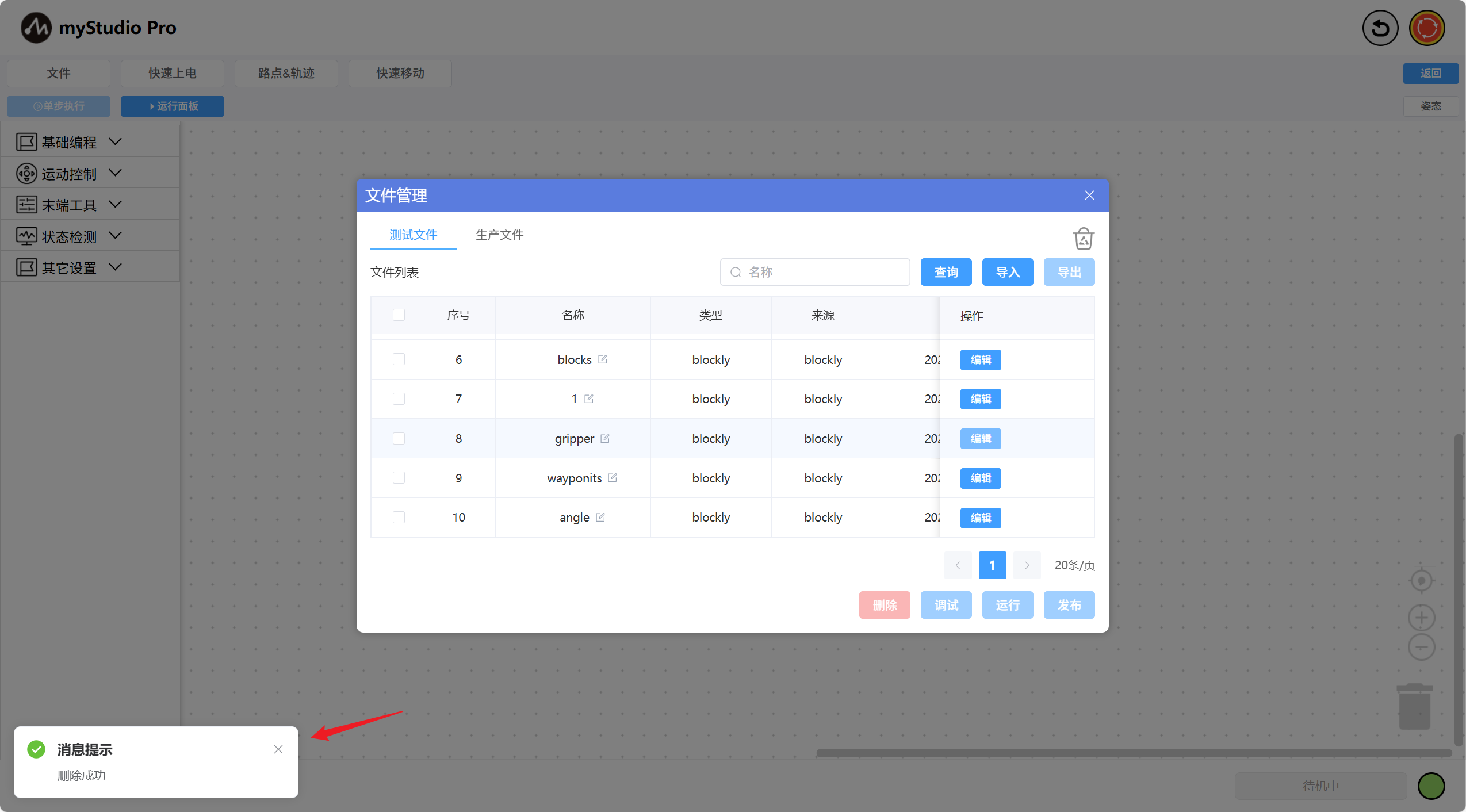
删除
点击删除按钮,批量删除,将勾选的文件删除到回收站。
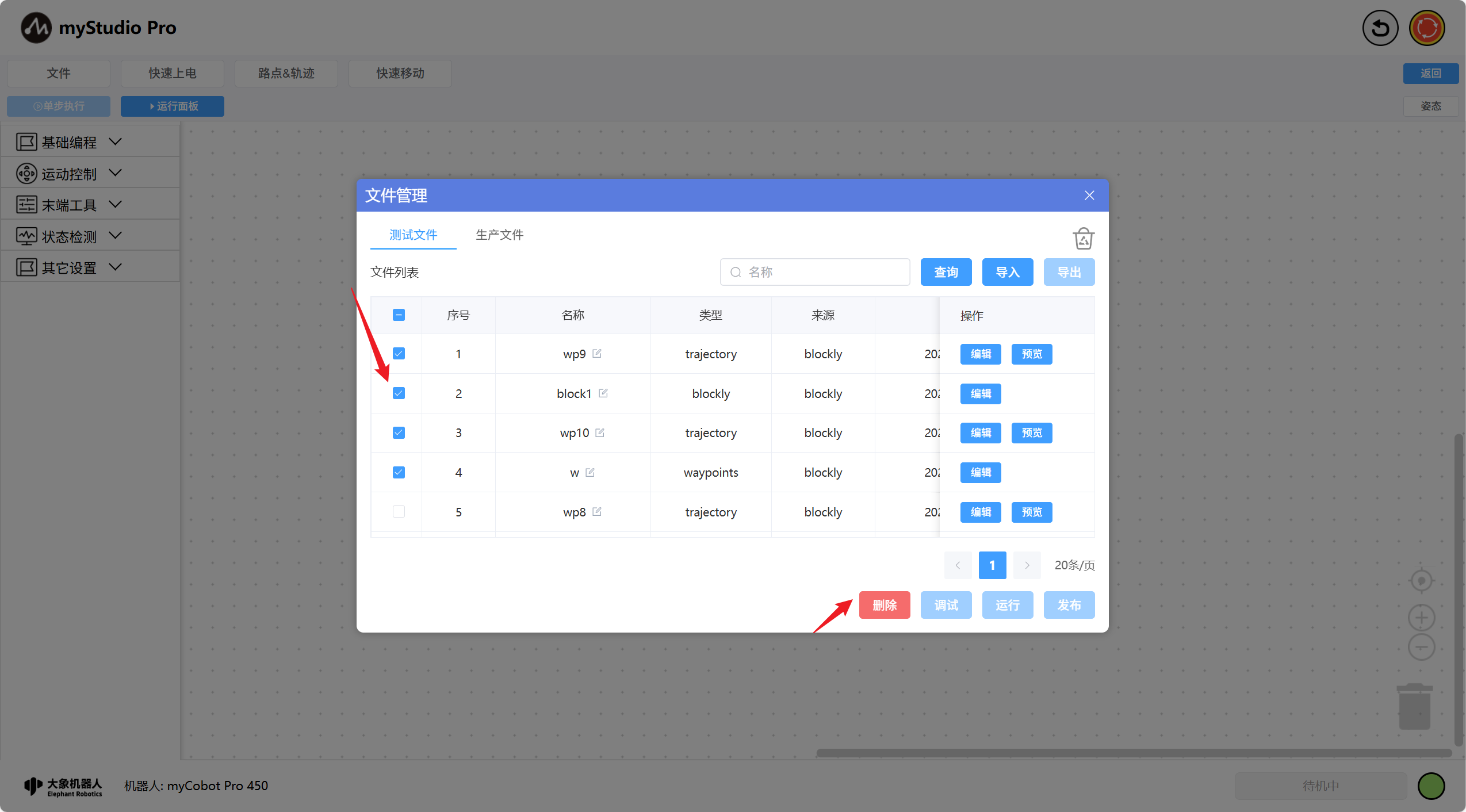
勾选需要删除的文件,然后点击删除按钮既可,然后切换到回收站选项即可将删除的文件查询到列表。
恢复
点击`恢复按钮,将回收站文件恢复到测试空间。
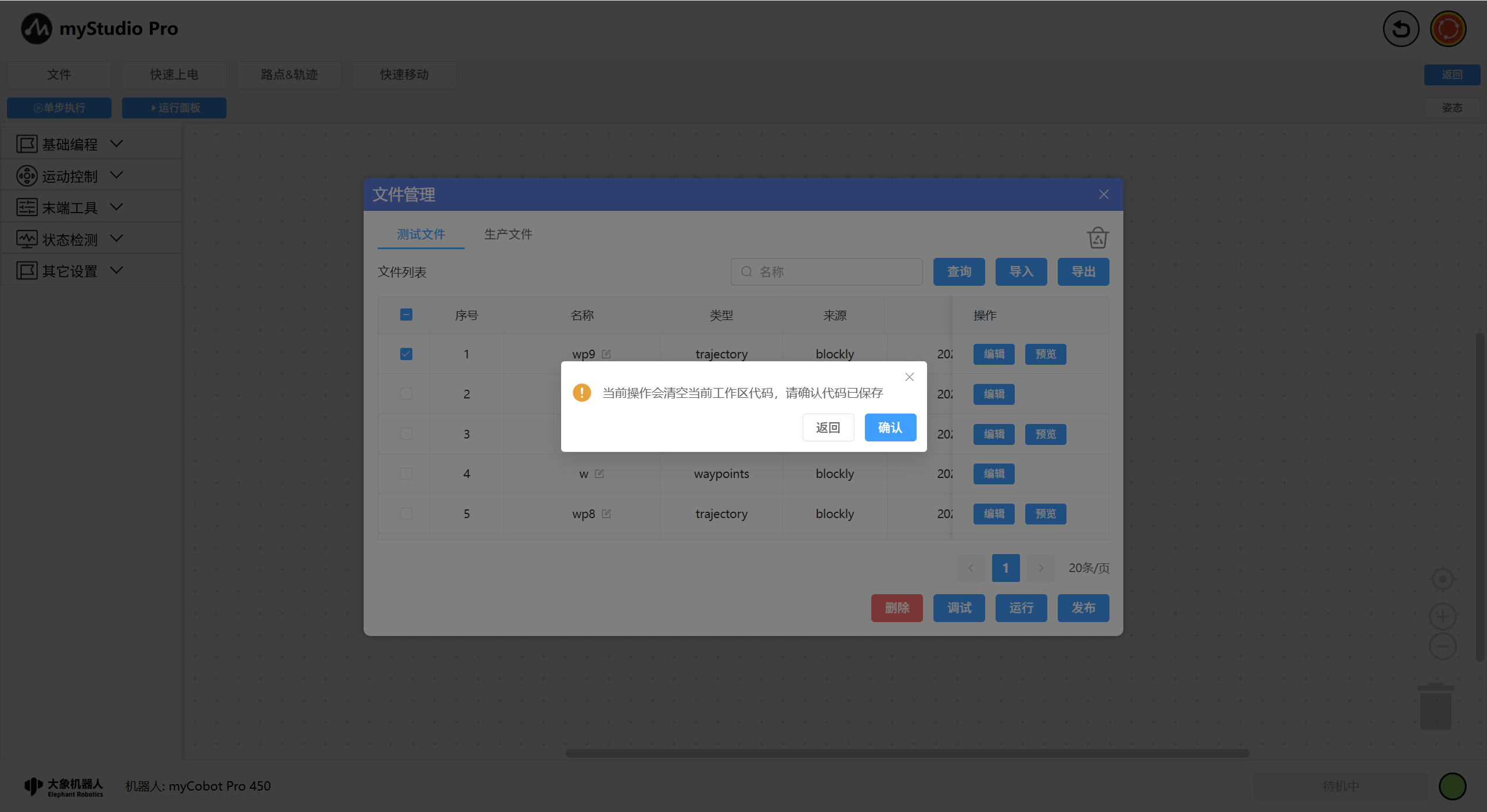
调试
勾选需要调试的文件,然后点击调试按钮,首先会对工作区是否有未保存的内容进行检测提示,有则弹窗显示,点击确认后再加载到工作区。否则直接加载,并打开调试面板。

点击运行全部即可进行调试。
运行
勾选需要运行的文件,然后点击运行按钮,首先会对工作区是否有未保存的内容进行检测提示,有则弹窗显示,点击确认后再加载到工作区。否则直接加载,并打开运行面板点击运行即可进行运行。
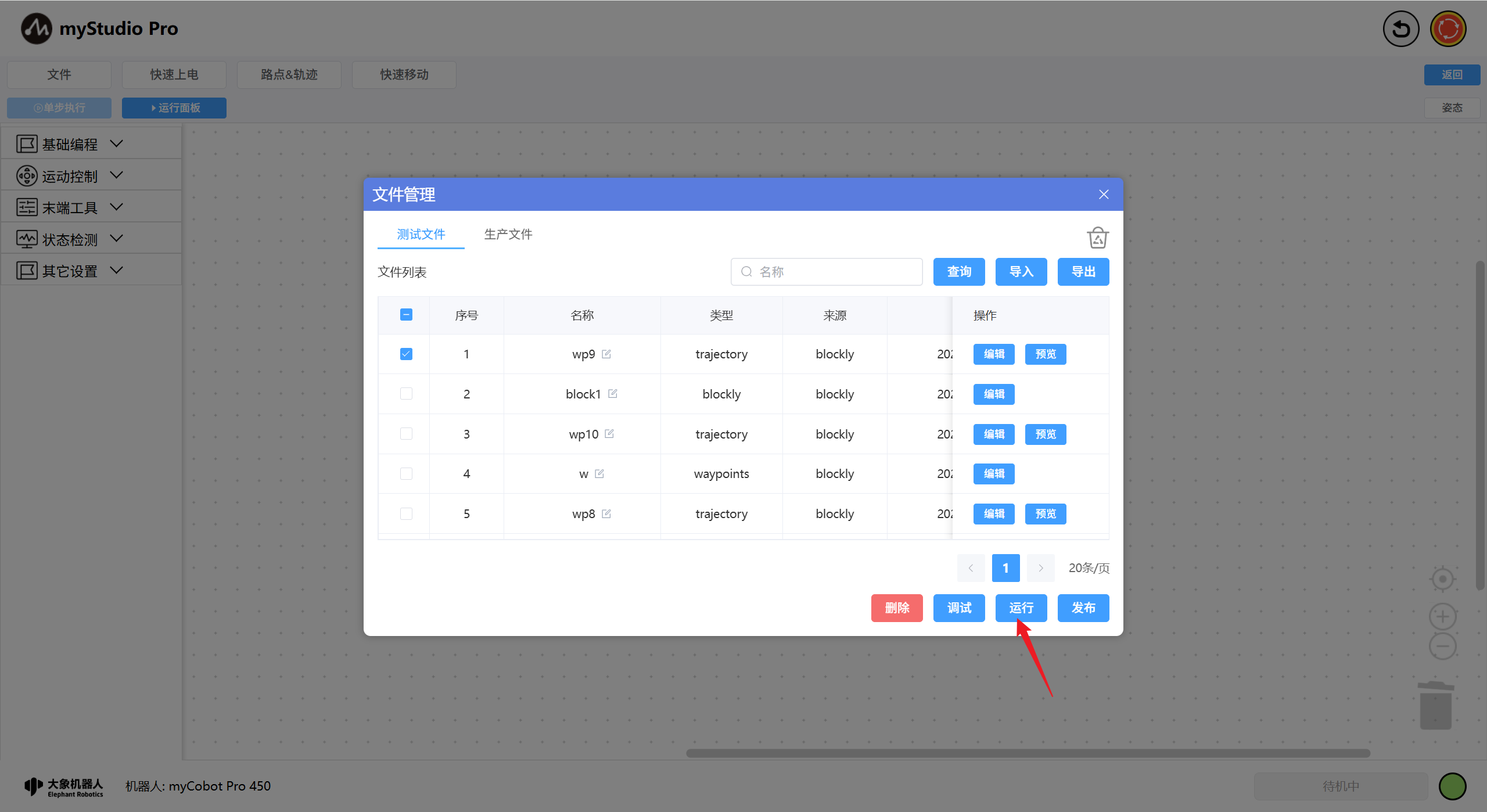
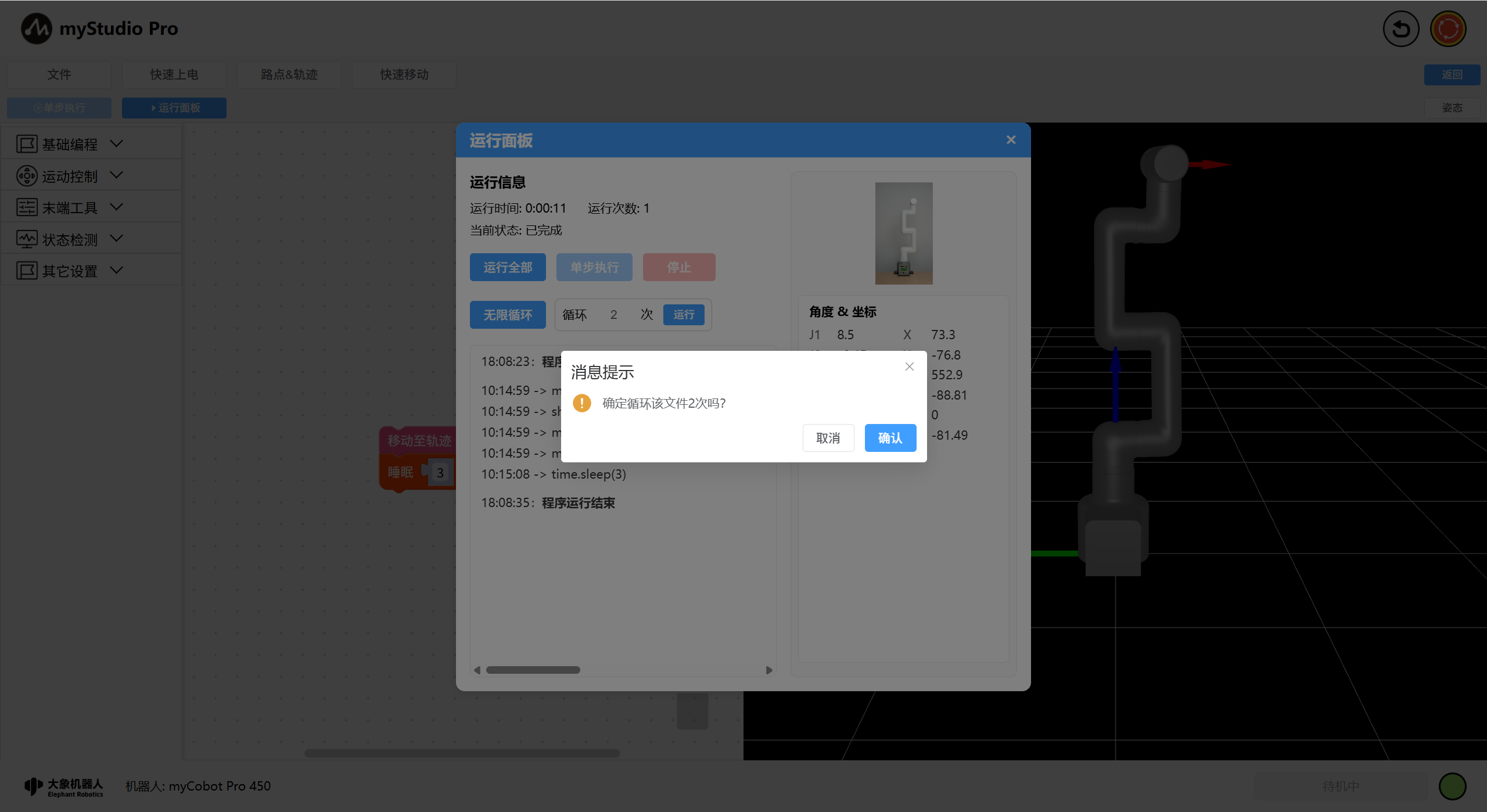
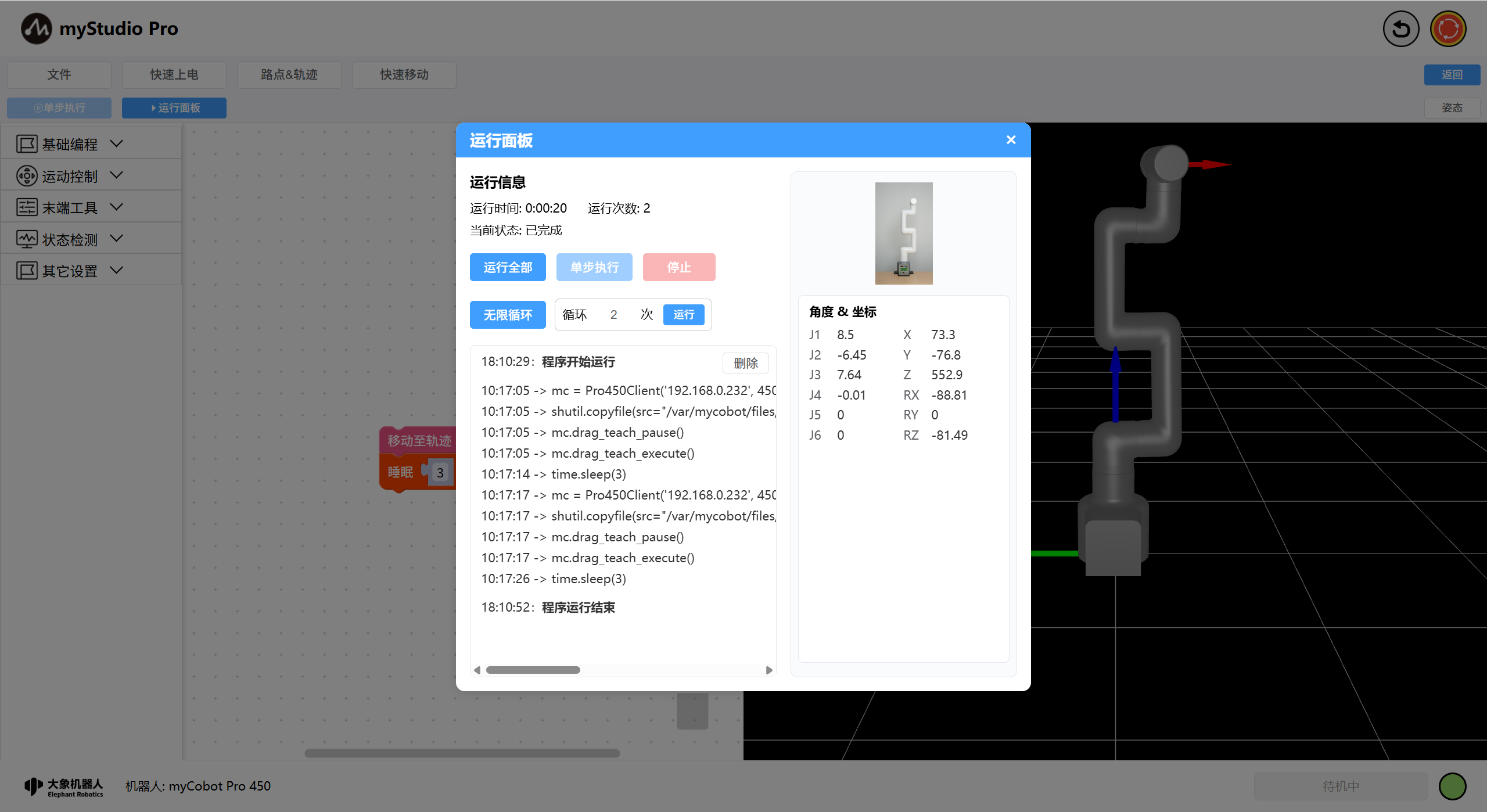
可以选择文件无限运行或指定运行次数(以下对次数循环讲解),设置完成后即可进行循环运行,首先会进行运行二次确认,点击确认后即开始循环运行。

运行完成后。
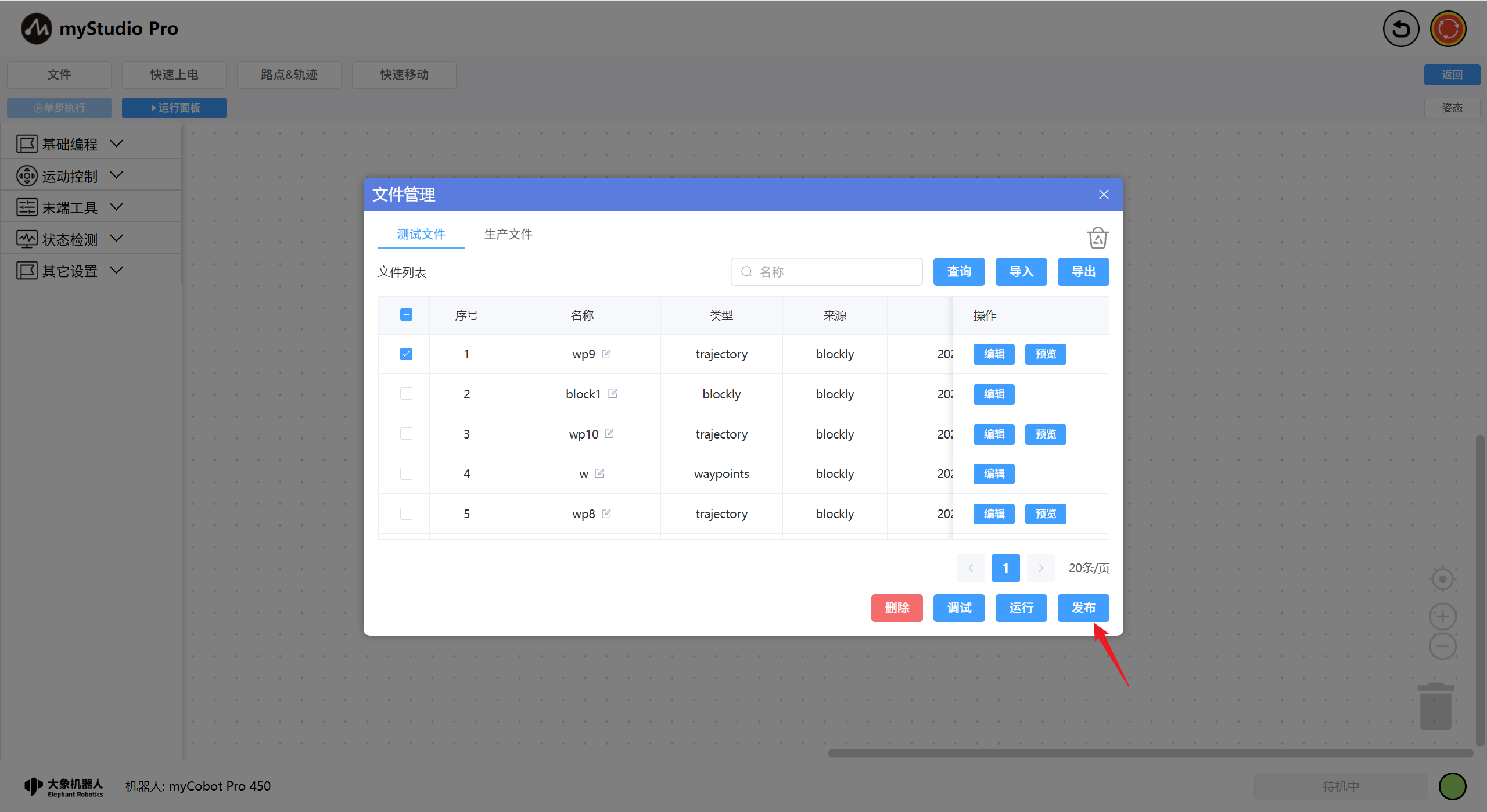
发布
勾选需要发布的文件,然后点击发布按钮,会将测试空间下对应的文件发布到生产空间。
拷贝
点击拷贝按钮,将生产空间文件拷贝到测试空间。
