<<<<<<< HEAD
MercuryCpp 编译运行
1 .下载
1.1源代码下载
在github上下载MycobotCpp。
1.2 动态库下载
Dependency library download(如需下载最新版本,请选择“Windows”或“Linux”,Windows操作系统需下载后缀。zip, Linux操作系统需下载。tar.gz)
2 在Linux上运行
将serial文件夹和mercurylib文件夹拷贝到er/目录下。Serial是串行通信库,mercurylib是c++库。我自己的代码是用main.cpp编写的。
2.1编译和构建
- mkdir build && cd build
- cmake ..
cmake --build .
2.2 运行
命令行运行:。/MercuryLIB(在本例中,从构建目录)
注意
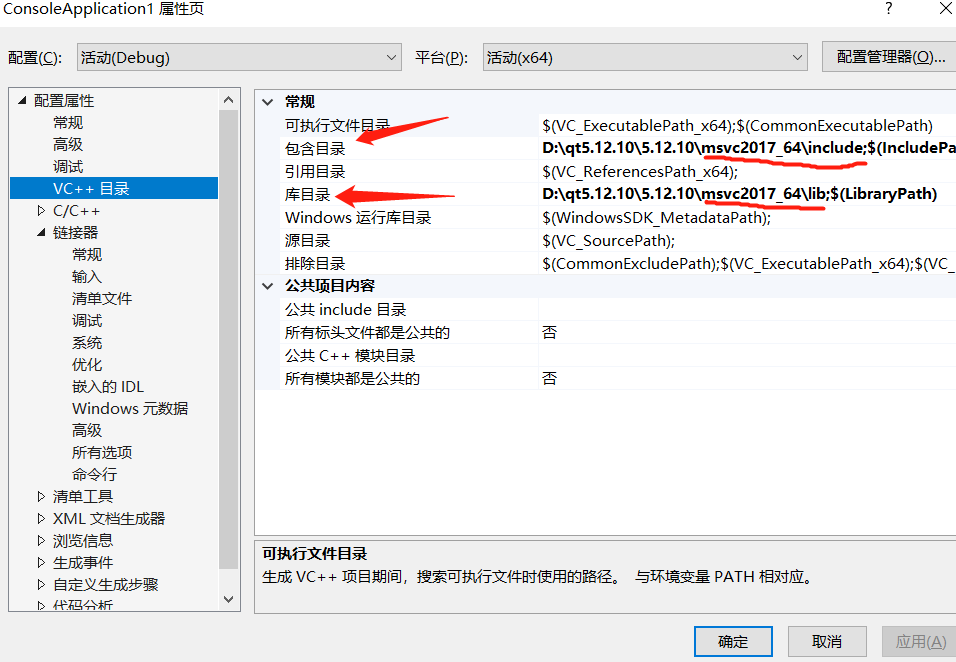
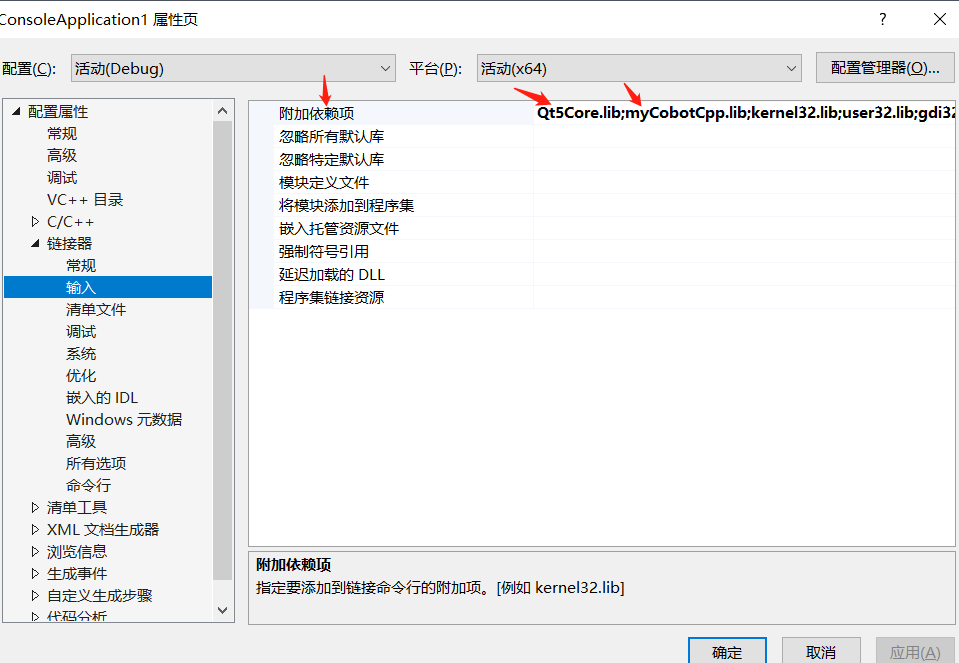
如果你不使用cmake编译,就像你直接在MFC中使用它一样,按照如下所示进行配置:
MercuryCpp Compile run
1 Download
1.1 Source code download
Download it on githubMycobotCpp。
1.2 Dynamic library download
Dependency library download(To download the latest version, select Windows or Linux, suffix.zip is the required library for Windows,.tar.gz is the required library for Linux)
2 Run on Linux
Copy the serial folder and mercurylib folder to the er/ directory. serial is the serial communication library, and mercurylib is the c++ library. My own code is written in main.cpp.
2.1 Compile and build
- mkdir build && cd build
- cmake ..
cmake --build .
2.2 Run
Command line run:./MercuryLIB (in this case, from the build directory)
Look out
If you do not compile with cmake, as if you are using it directly in MFC, configure as shown below:
b4cbb522d469c9fae1bce398ab2eea533b152ea9