Detailed explanation of building block interface
This chapter introduces the meaning of building blocks and the explanation of input items in blockly.
The building blocks in the basic programming classification are beyond the scope of this chapter
Some notes:
1、Python Prototypes in interface explanation, herecan be found.
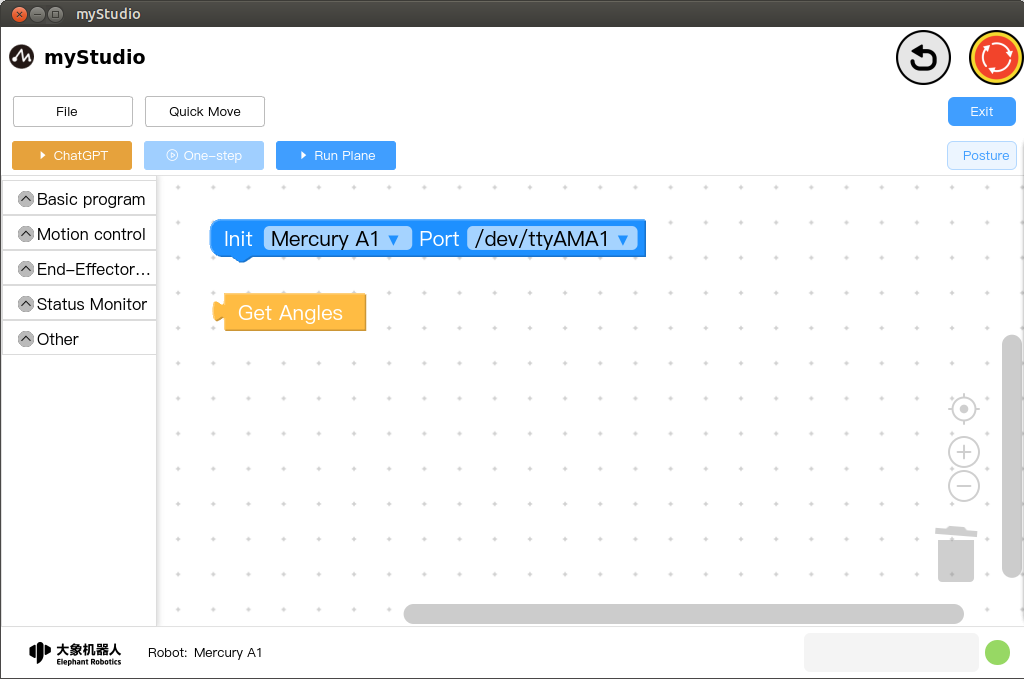
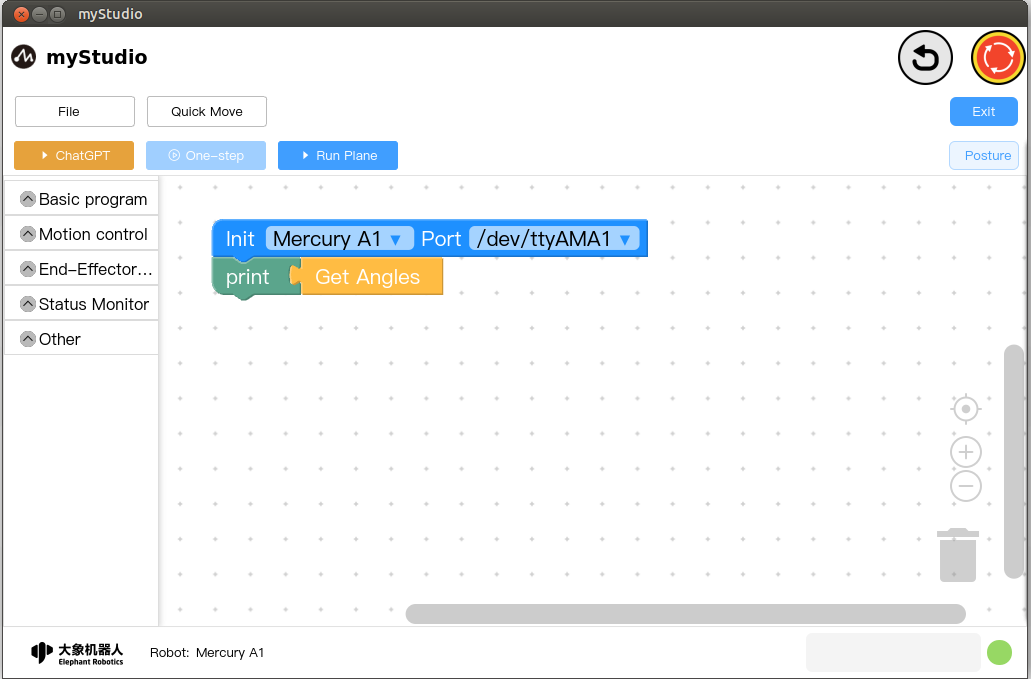
2、Interfaces with return values need to be used with the Print building block in the Text category under the Basic Program category. When running the code, the Print block will print out the return value.
for example:
Wrong way to use:
Correct way to use:
Motion control category
Drag & Teach category
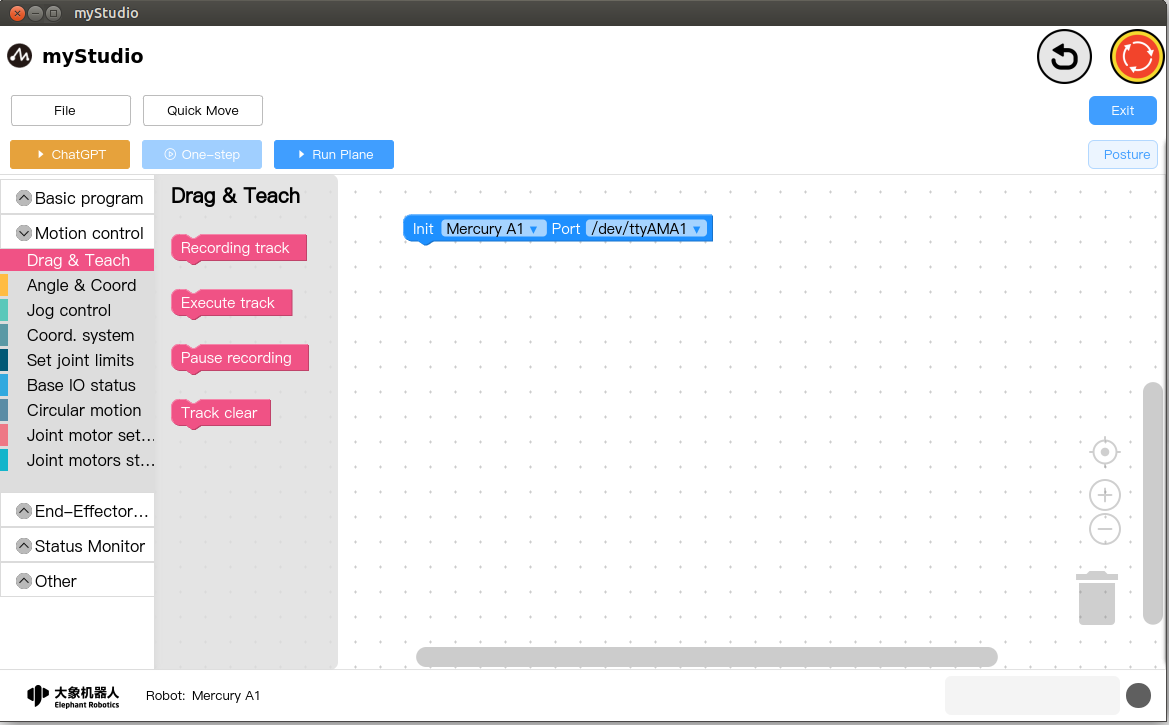
Recording track
Python Prototype:
drag_tech_save()Interface Description: After use, the robotic arm will relax and can be dragged by the user, and the user's drag trajectory will be recorded in real time.
Execute track
Python Prototype:
drag_tech_execute()Interface Description: Play user-recorded tracks
Pause recording
- Python Prototype:
drag_tech_pause() - Interface Description: Pause recording. The robotic arm will be locked and cannot be dragged.
Track clear
Python Prototype:
drag_teach_clean()Interface Description: Clear user-recorded tracks
Angle & Coord category
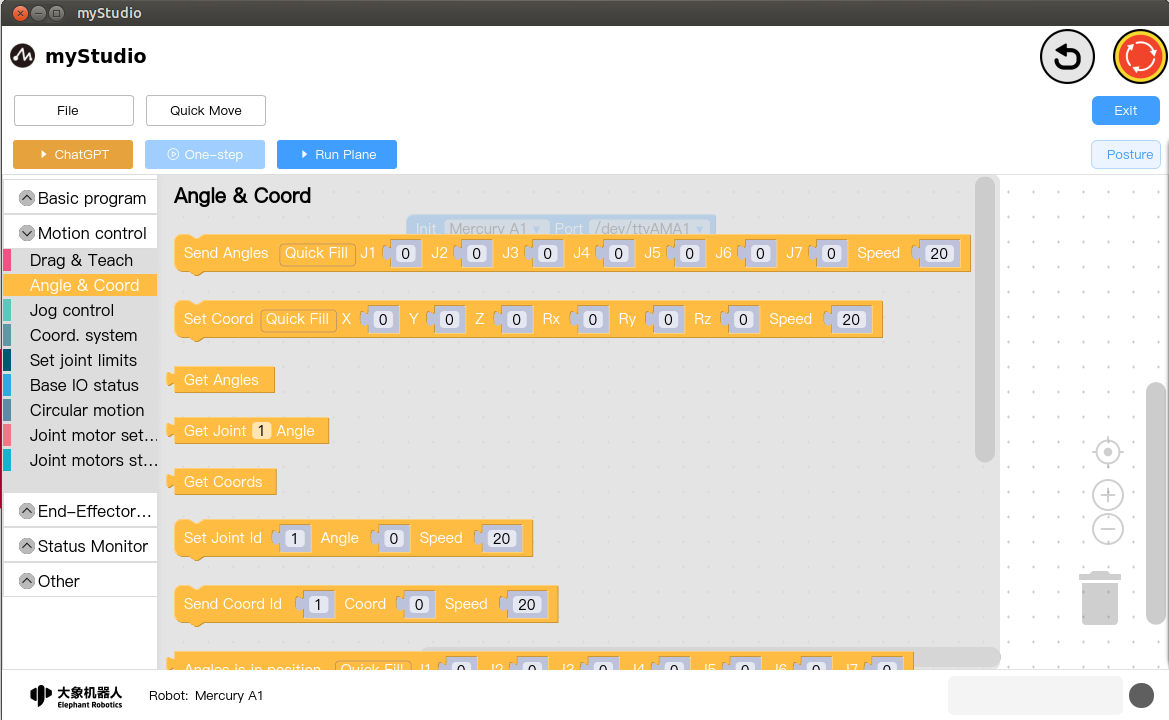
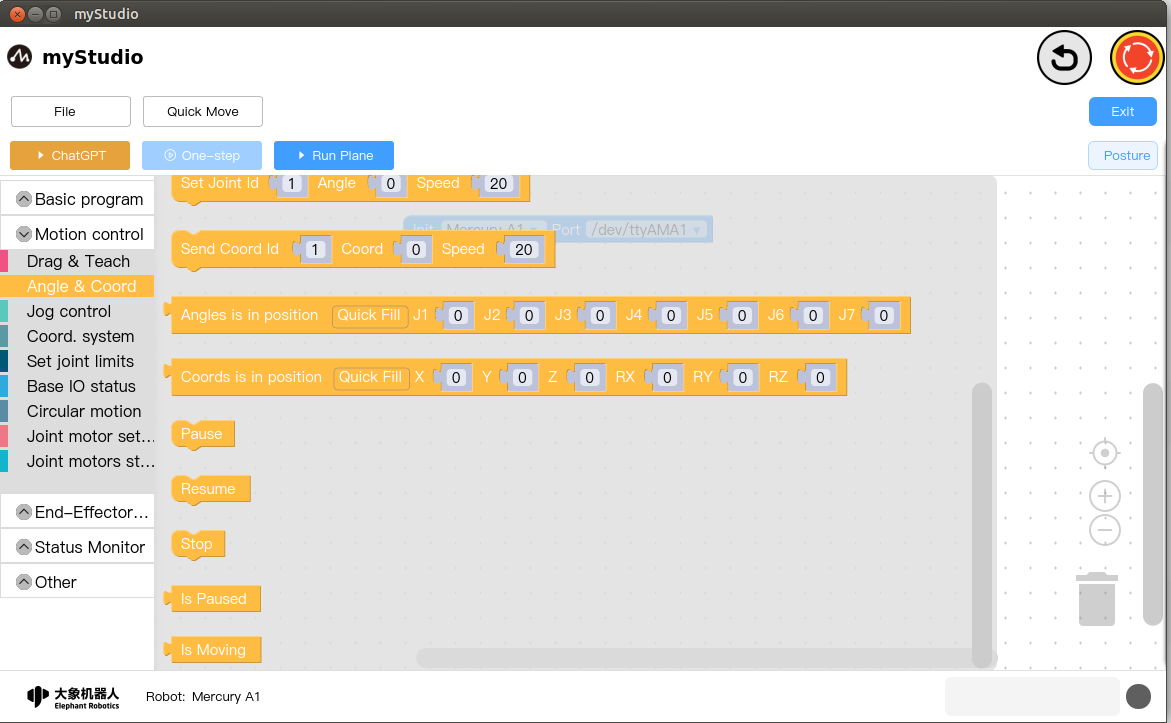
Send Angles
- Python Prototype:
send_angles(angles,speed) Interface Description: Send all angles to robot arm.
Params
angles: coords(List[float])speed: (int) 0 ~ 100
Set Coord
Python Prototype:
send_coords(coords,speed,mode)Interface Description: Send all coordinates to the robot arm.
Params
coords: coords(List[float])speed: (int) 0 ~ 100
Get Angles
Python Prototype:
get_angles()Interface Description: Get the degrees of all joints
Return:
- joint angle value
Get Joint Angle
Python Prototype:
get_angle(id)Interface Description: Obtain robot single joint angle control
Params
id: joint id: 1-7degree: degree
Get Coords
Python Prototype:
get_coords()Interface Description:
- Get Cartesian coordinates
Set Joint Angle
Python Prototype:
send_angle(id, degree, speed)Interface Description: Robot single joint angle control
Params
id: joint id: 1-7degree: degreespeed: speed
Send Coord
- Python Prototype:
send_coord(id, value, speed) Interface Description: Robot single coordinate control
Params
id: Coordinates: 1-6 correspond to x, y, z, rx, ry, rz respectivelyvalue: coord valuespeed: speed
Angles is in position
Python Prototype:
is_in_position([j1,j2,j3,j4,j5,j6,j7],0)Interface Description: Check whether the machine angle reaches the specified position
Params:
j1: j1 angle valuej2: j2 angle valuej3: j3 angle valuej4: j4 angle valuej5: j5 angle valuej6: j6 angle valuej7: j7 angle value
Return:
0: Did not reach the specified location
1: Arrive at designated location
Coords is in position
Python Prototype:
is_in_position([x,y,z,rx,ry,rz],1)Interface Description: Check whether the machine coord reaches the specified position
Params:
x coordinate value
y coordinate value
z coordinate value
rx coordinate value
ry coordinate value
rz coordinate value
Return:
- 0: Did not reach the specified location
- 1: Arrive at designated location
Pause
- Python Prototype:
pause - Interface Description: Enter the pause state, suspending all movements of the machine.
Resume
- Python Prototype:
resume - Interface Description: Exit the pause state and resume machine movement.
Stop
- Python Prototype:
stop - Interface Description: Stop all movement of the machine.
Is Paused
- Python Prototype:
is_paused - Interface Description: Detect whether the machine is in paused state.
- Return:
- 0: Not in pause state
- 1: In paused state
- -1: Error
Is Moving
- Python Prototype:
is_moving(id, value, speed) - Interface Description: Detect whether the machine is moving.
- Return:
- 0: The machine is not running
- 1: The machine is running
- -1: Machine data error
Jog control category
The so-called jog control is to control the mechanical arm to move in the forward or reverse direction until the movement reaches the limit.
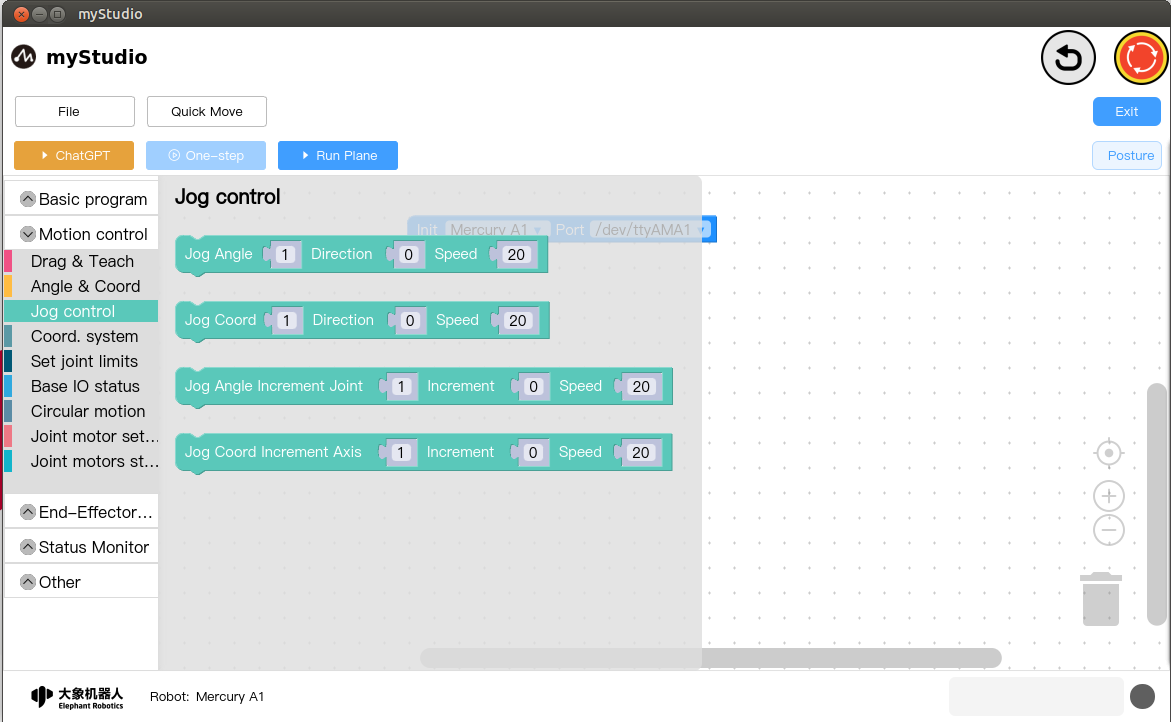
Jog Angle
Python Prototype:
jog_angle(joint_id,direction,speed)Interface Description: Jog control angle. Control the joint to move in the forward or reverse direction until the movement reaches the joint limit.
Params
joint_id: (int) joint id: 1 ~ 7direction: direction: 1 / 0speed: speed: 0 ~ 100
Jog Coord
Python Prototype:
jog_coord(coord_id,direction,speed)Interface Description: Jog control coordinates. Control the coordinates to move in the forward or reverse direction until the movement reaches the joint limit.
Params
coord_id: coordinate id: 1 ~ 6 (corresponding to X, Y, Z, RX, RY, RZ)direction:0- decrease,1- increasespeed: speed0 ~ 100
Jog Angle Increment
Python Prototype:
jog_increment_angle(joint_id,value,speed)Interface Description: Angle step mode. Control the joint to add the given value to the current angle value
Params
joint_id: (int) joint id: 1 ~ 7value: incremental valuespeed: speed: 0 ~ 100
Jog Coord Increment
Python Prototype:
jog_increment_coord(coord_id,value,speed)Interface Description: Coordinate stepping mode. Controls the coordinates to be added to the current value by the given value
Params
coord_id: coordinate id: 1 ~ 6 (corresponding to X, Y, Z, RX, RY, RZ)value: incremental valuespeed: speed0 ~ 100
Coord. system category
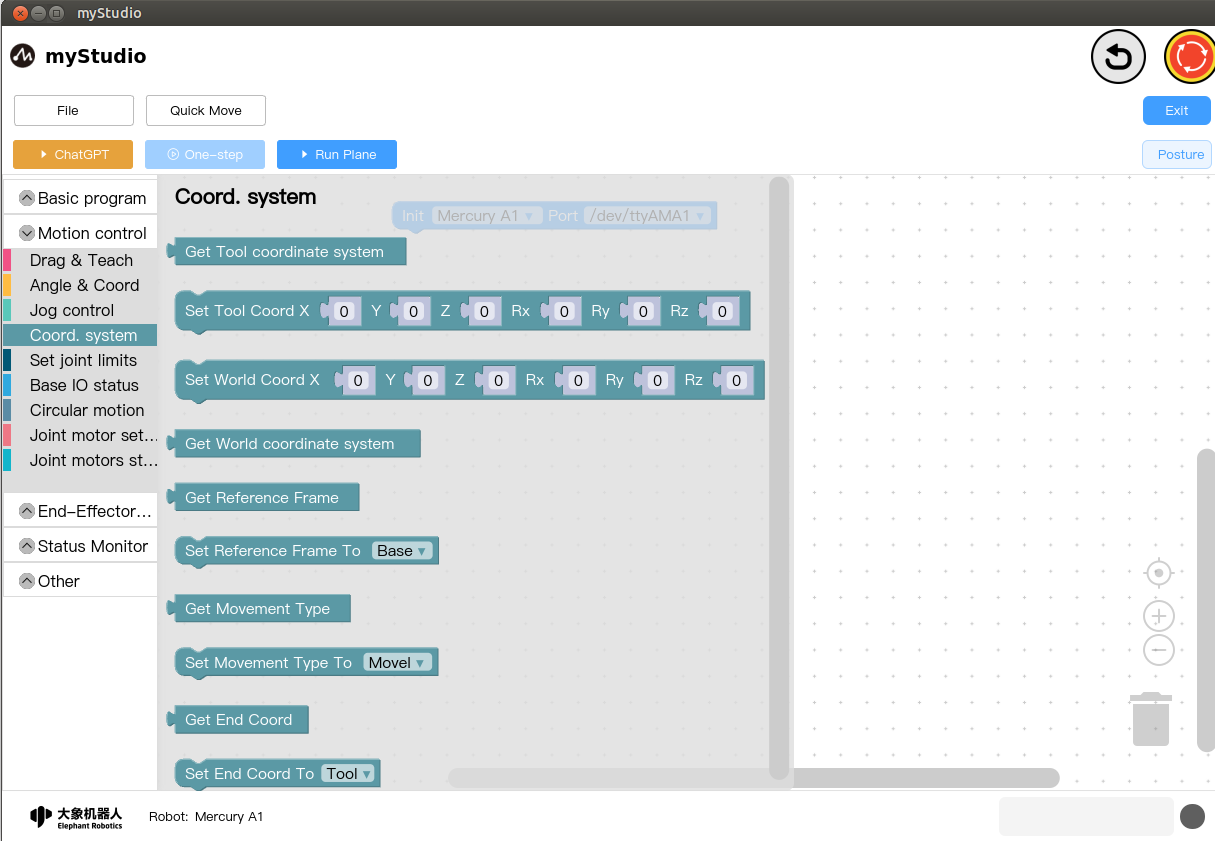
Get Tool coordinate system
- Python Prototype:
get_tool_reference() - Interface Description: Get the tool coordinate system.
- Return:
(list)[x,y,z,rx,ry,rz]
Set Tool Coord
- Python Prototype:
set_tool_reference(coords) - Interface Description: Set the tool coordinate system.
- Params:
(list)[x, y, z, rx, ry, rz]。
Get World Coord
- Python Prototype:
get_world_reference() - Interface Description: Get world coordinate system
- Return:
(list)[x, y, z, rx, ry, rz]。
Set World Coord
Python Prototype:
set_world_reference(coords)Interface Description: Set world coordinate system
Params:
coords: (list) [x, y, z, rx, ry, rz]。
Get Reference Frame
- Python Prototype:
get_reference_frame() - Interface Description: Get the base coordinate system.
- Return:
- 0 - Base
- 1 - Tool。
Set Reference Frame
Python Prototype:
set_reference_frame(rftype)Interface Description: Set the base coordinate system.
- Params:
rftype: 0 - Base 1 - Tool。
Get Movement Type
- Python Prototype:
get_movement_type() - Interface Description: Get the motion type.
- Return: 1 - movel,0 - moveJ。
Set Movement Type
Python Prototype:
set_movement_type(move_type)Interface Description: Set the motion type.
Params:
move_type: 1 - movel,0 - moveJ。
Get End Coord
- Python Prototype:
get_end_type() - Interface Description: Get the end coordinate system.
- Return: 0 - flange, 1 - tool.
Set End Coord
Python Prototype:
set_end_type(end)Interface Description: Set the end coordinate system.
Params:
end: 0 - flange, 1 - tool.
Set joint limits category
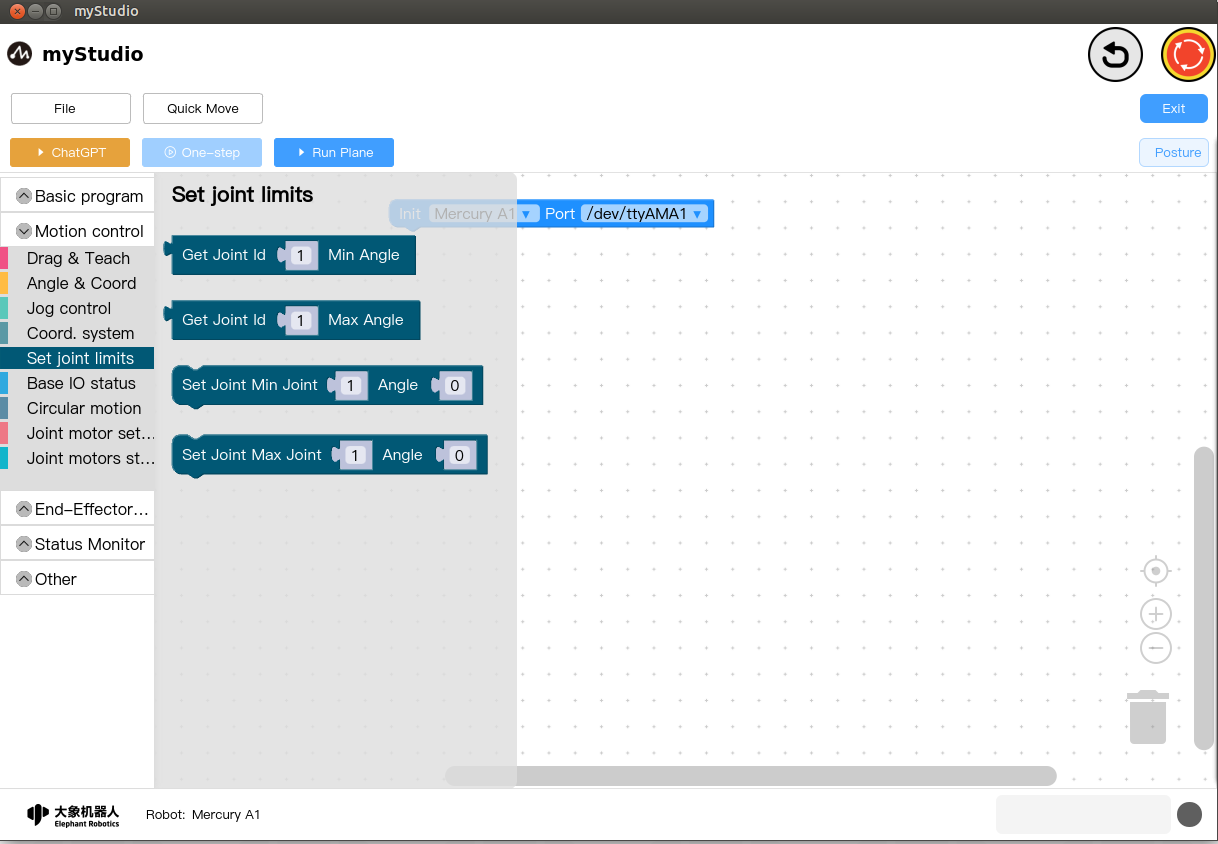
Get Joint Min Angle
- Python Prototype:
get_joint_min_angle(joint_id) - Interface Description: Get the minimum motion angle of the specified joint
- Params:
joint_id: (int) - Return:
- angles(
float)
- angles(
Get Joint Max Angle
- Python Prototype:
get_joint_max_angle(joint_id) - Interface Description: Get the maximum motion angle of the specified joint
- Params:
joint_id: (int) - Return:
- angles
float)
- angles
Set Joint Min Angle
- Python Prototype:
set_joint_min(id, angle) Interface Description: Sets the minimum angle of the specified joint.
Params:
joint idangle
Set Joint Max Angle
- Python Prototype:
set_joint_max(id, angle) Interface Description: Sets the maximum angle of the specified joint.
Params:
joint idangle
Base IO status category
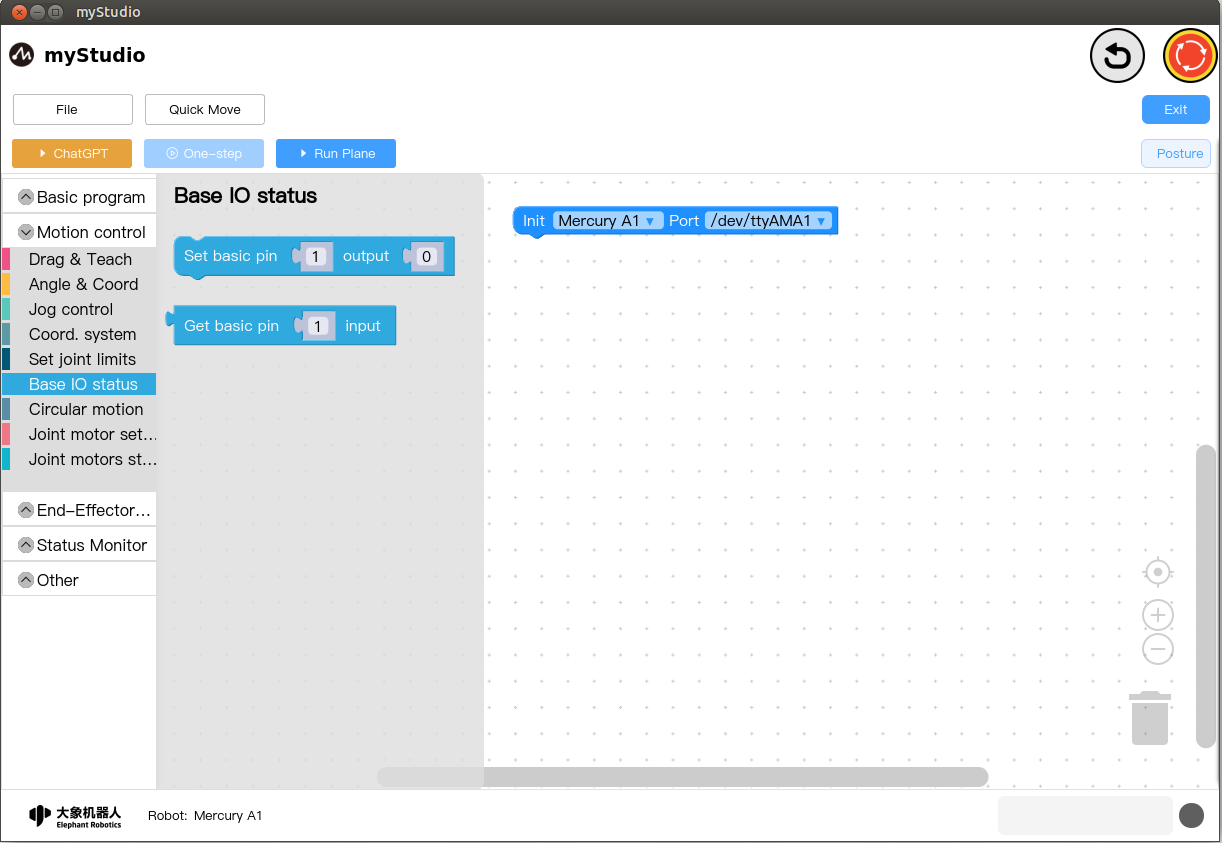
Set basic pin output
- Python Prototype:
set_basic_output(id,state) - Interface Description: Set base pin output
- Params:
id: pin numberstate: select output state
Get basic pin output
- Python Prototype:
set_basic_output(id) - Interface Description: Get base pin output
- Params:
id: pin
- Return:
- Pin input status
Circular motion category
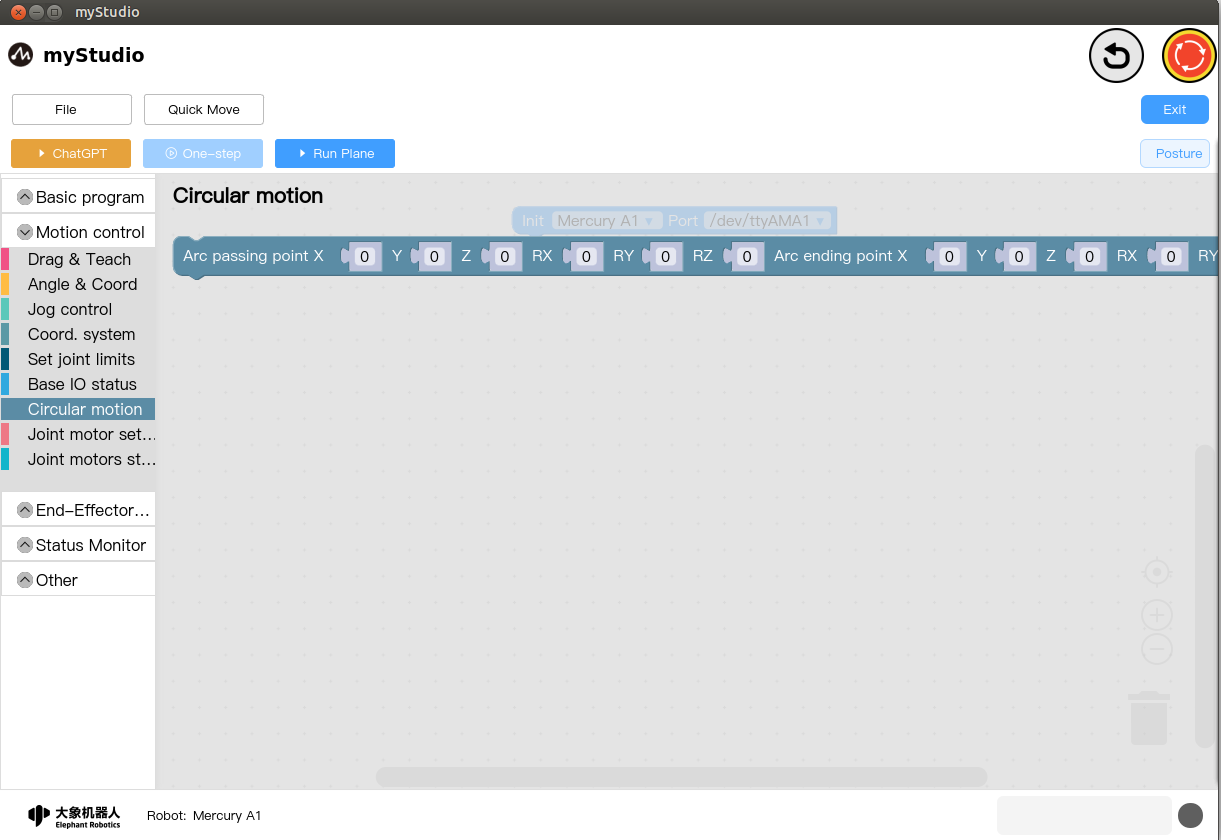
Arc
Python Prototype:
write_move_c(transpoint,endpoint,speed)Interface Description: Arc trajectory motion
Params:
transpoint: Arc way point(list): [x,y,z,rx,ry,rz]endpoint: Arc end point(list): [x,y,z,rx,ry,rz]
Joint motor setting category
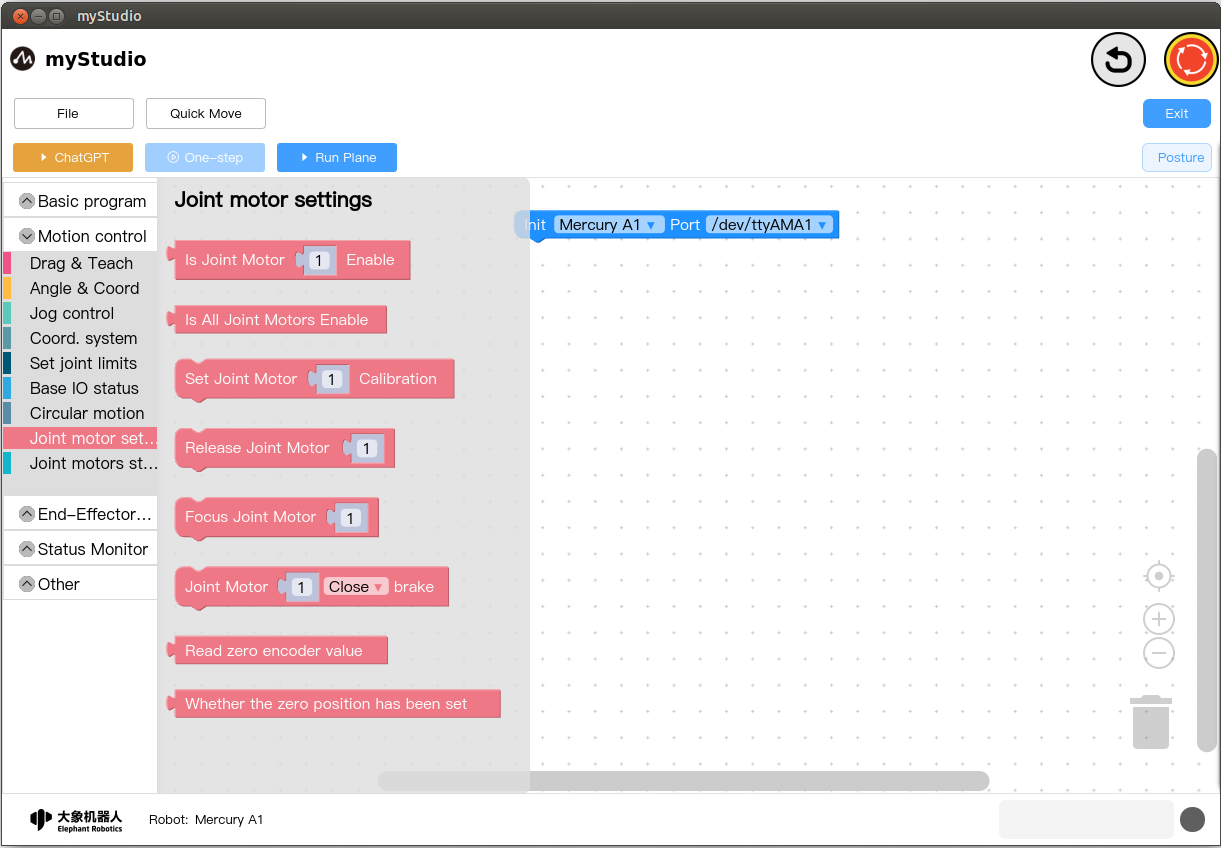
Is Joint Motor Enable
- Python Prototype:
is_servo_enable(servo_id) - Interface Description: Determine whether the servo is turned on
- Params:
servo_id(int) 1 ~ 7 - Return:
0: not enabled1: enabled-1: error
Is All Joint Motors Enable
- Python Prototype:
is_all_servo_enable() - Interface Description: Determine whether all servos are turned on
- Return:
0: Not all are enabled1: both are enabled-1: error
Set Joint Motor Calibration
- Python Prototype:
set_servo_calibration(servo_no) - Interface Description: Calibrate the joint actuator with the current position as the angle zero point.
- Params:
servo_no: Servo number, 1 - 7.
Release Joint Motor
- Python Prototype:
release_servo(servo_id) - Interface Description: The specified joint motor is powered off
- Params:
servo_id: 1 ~ 7
Focus Joint Motor
- Python Prototype:
focus_servo(servo_id) - Interface Description: Power on the specified joint motor
- Params:
servo_id: 1 ~ 7
Joint Motor Close/Open brake
- Python Prototype:
joint_brake(servo_id,status) - Interface Description: Set the brake state of the specified joint motor
- Params:
servo_id: joint motor 1 ~ 7status: open/closed
Read zero encoder value
- Python Prototype:
get_zero_pos - Interface Description: Read the zero encoder value
- Return:
- Zero encoder value
Whether the zero position has been set
- Python Prototype:
is_init_calibrated - Interface Description: Determine whether zero position has been set
- Return:
True: zero bit setFalse: zero bit not set
Joint motors status category
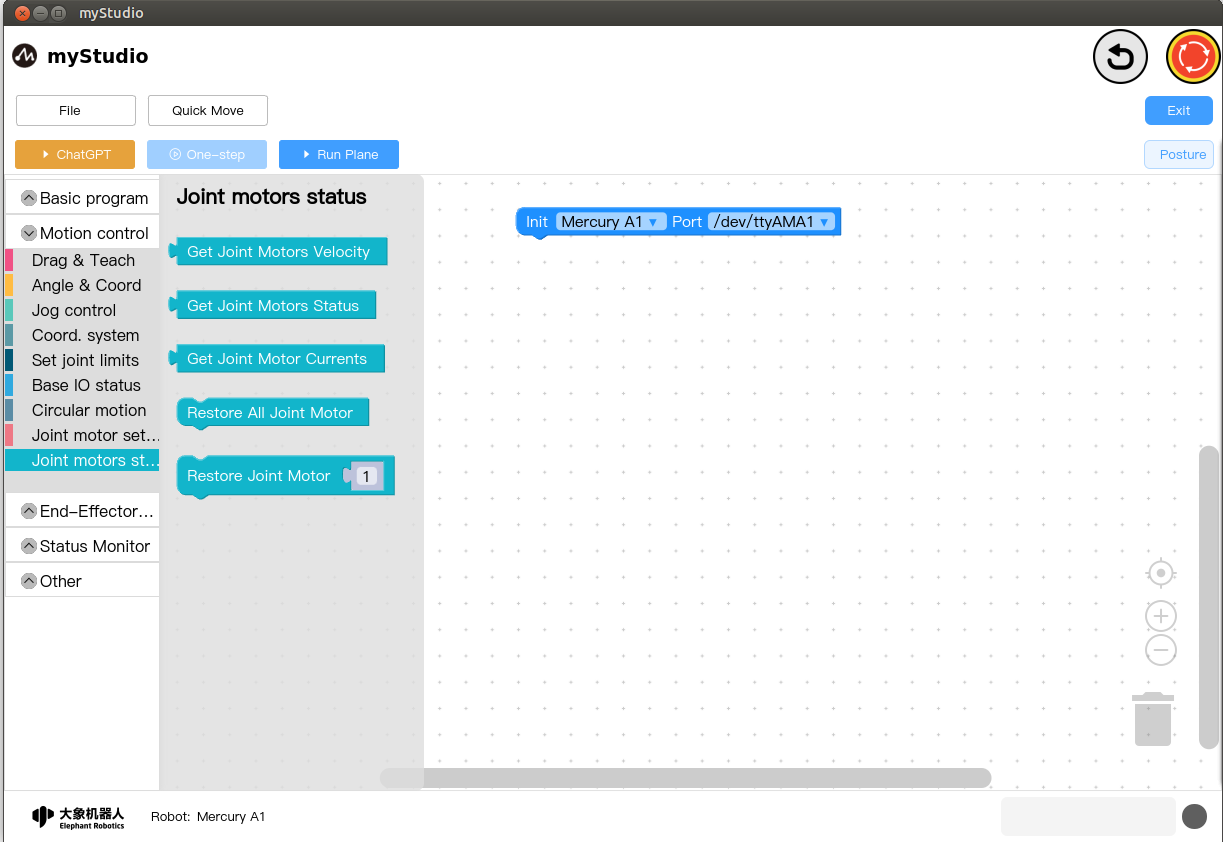
Get Joint Motors Velocity
- Python Prototype:
get_servo_speeds() - Interface Description: Get Joint Motors Velocity
- Return:
- speeds
Get Joint Motors Status
- Python Prototype:
get_servo_status() - Interface Description: Get the status of each joint motor
- Return:
- status of each joint motor
Get Joint Motor Currents
- Python Prototype:
get_servo_currents() - Interface Description: Get the motor current of each joint
- Return:
- Motor current of each joint
Restore All Joint Motor
- Python Prototype:
servo_restore(254) - Interface Description: Joint motor abnormality recovery Reset all joint motors
Restore Joint Motor
- Python Prototype:
servo_restore(joint_id) - Interface Description: Joint motor abnormal recovery
- Params:
joint_id: Joint id: 1-7
End-Effector Tool category
Gripper Control category
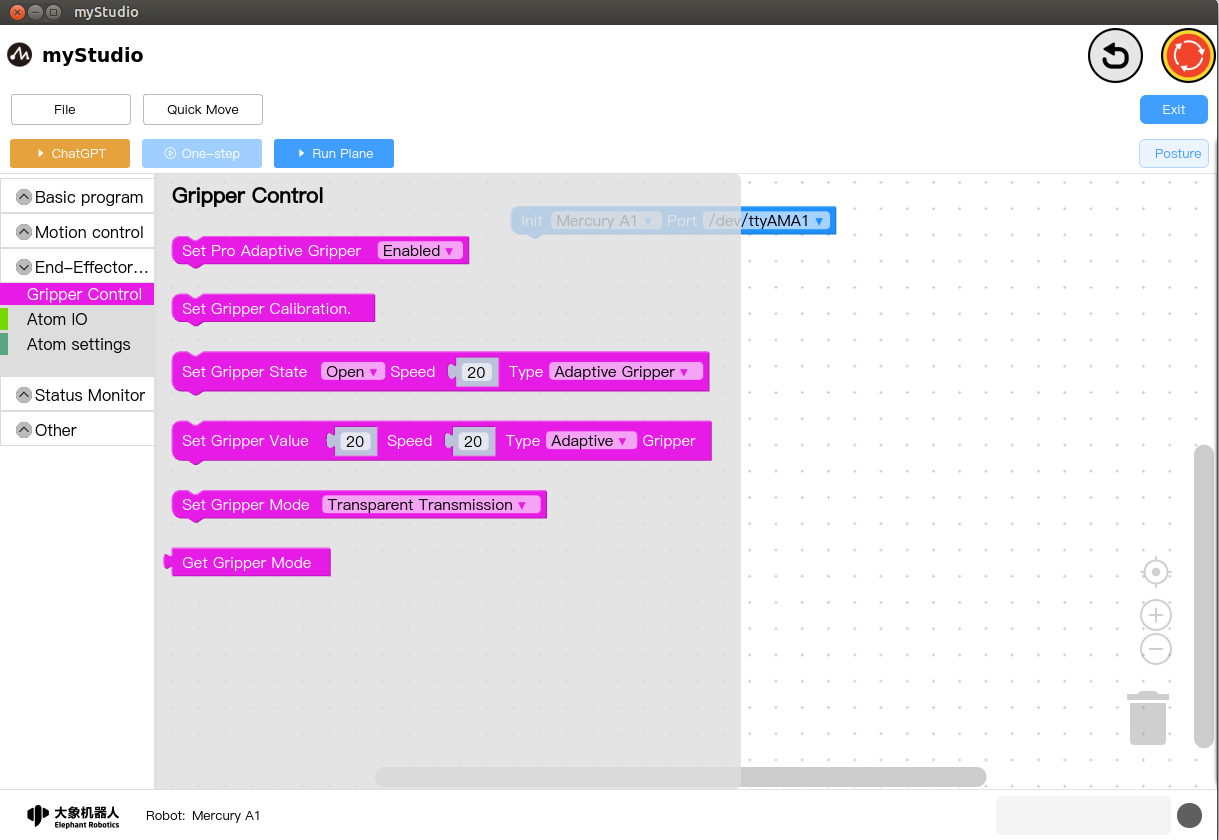
Set Pro Adaptive Gripper
- Python Prototype:
set_gripper_enabled(flag) - Interface Description: Setting up the Pro Adaptive Gripper
- Params:
flag: Enabled / Release
Set Gripper Calibration
- Python Prototype:
set_gripper_calibration() - Interface Description: Set the current position to zero and set the current position value to
2048.
Set Gripper State
- Python Prototype:
set_gripper_state(flag, speed, mode) - Interface Description: Set the gripper switch state
- Params
flag: status: open/closedspeed: speed: 0 ~ 100mode: gripper type
Get Gripper Value
- Python Prototype:
set_gripper_value(值,speed,模式) - Interface Description: get gripper value
- Params
value: value: 0 ~ 100speed: speed: 0 ~ 100mode: gripper type
Set Gripper Mode
- Python Prototype:
set_gripper_mode(status) - Interface Description: Set the gripper mode.
- Params:
status: Transparent Transmission / Port Mode.
Get Gripper Mode
Python Prototype:
get_gripper_mode()Interface Description: get gripper mode
Return:
0: Transparent Transmission1: Port Mode
Atom IO category
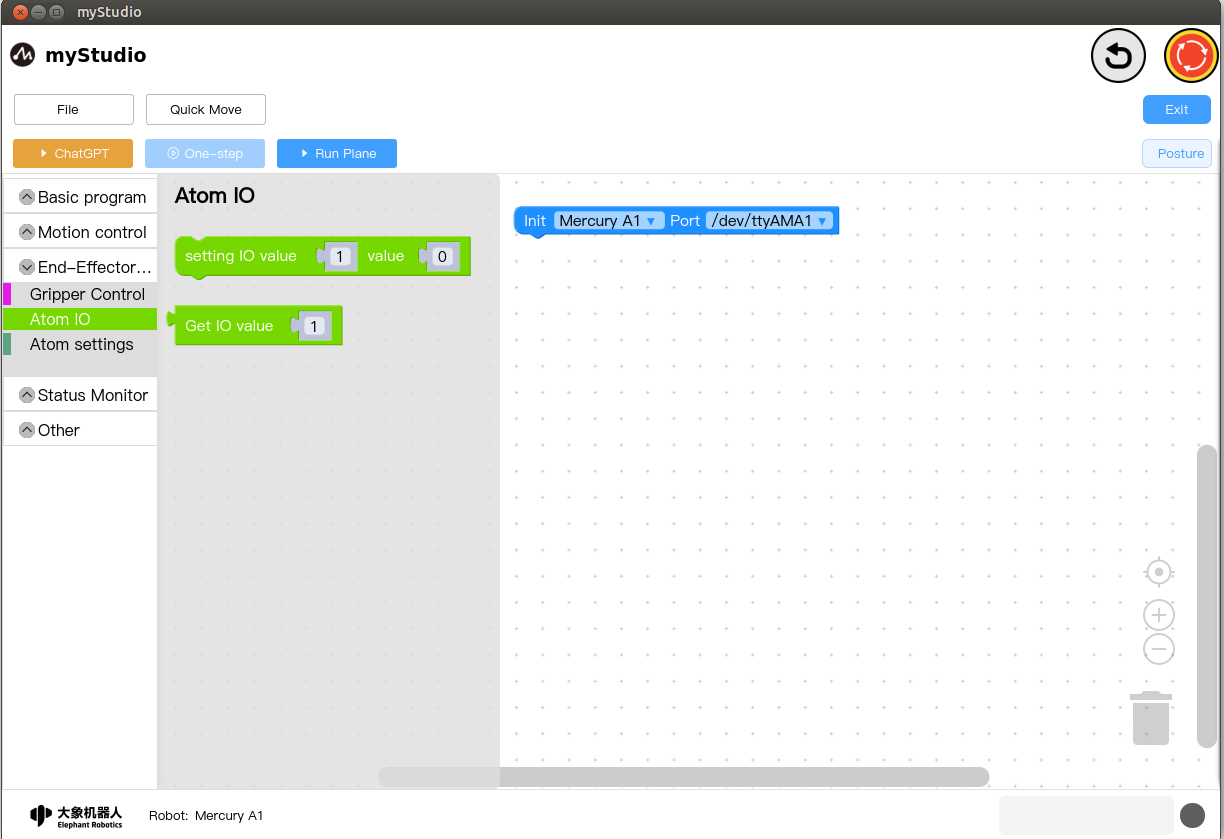
setting IO value
- Python Prototype:
set_digital_output(id,state) - Interface Description: Set IO value
- Params
id: io serial numberstate: select state 0 or 1
Get IO value
- Python Prototype:
get_digital_input(id) - Interface Description: Read IO value
- Params
id: io serial number
Atom settings category
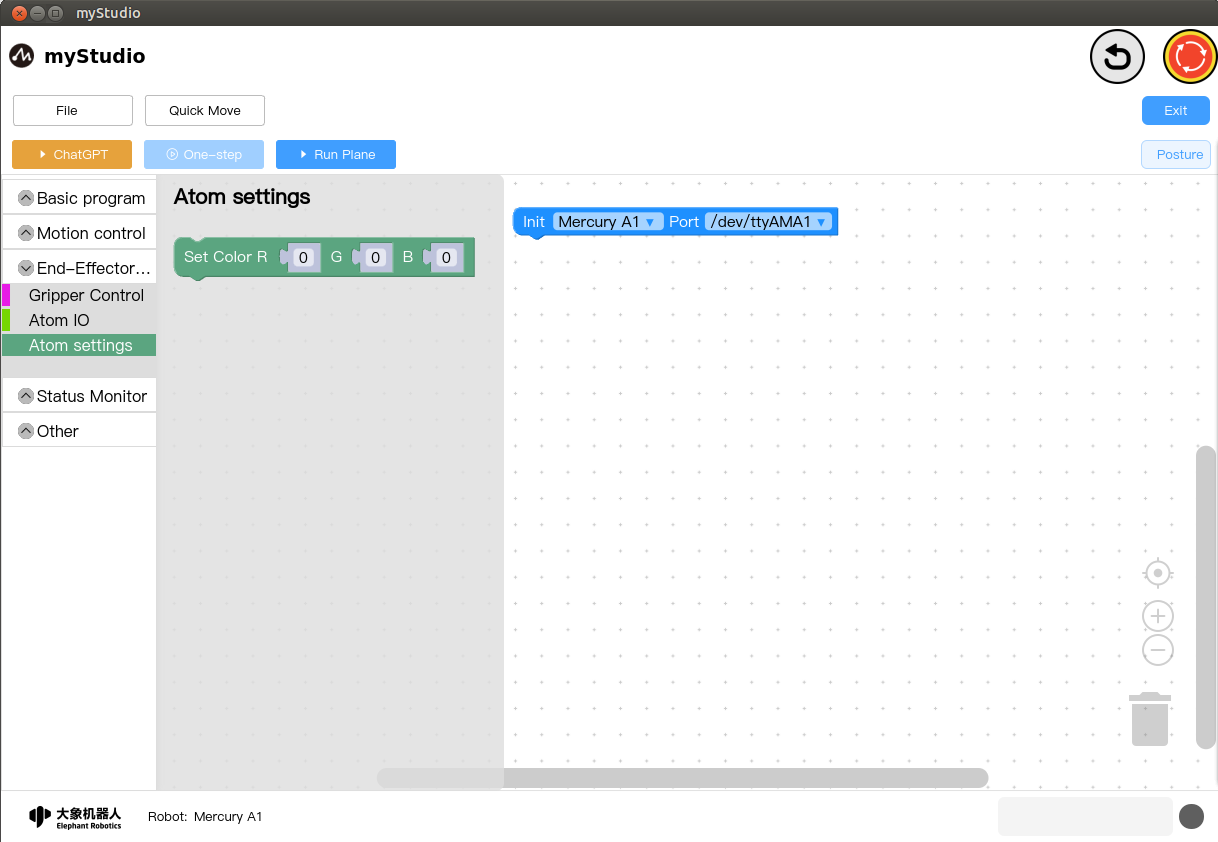
Set Color
- Python Prototype:
set_color(red=0,green=0,blue=0) - Interface Description: Set the color of the end LED light
- Params:
red: Red 0 - 255green: Green 0 -255blue: Blue (0- 255)
Status Monitor category
Operation Status category
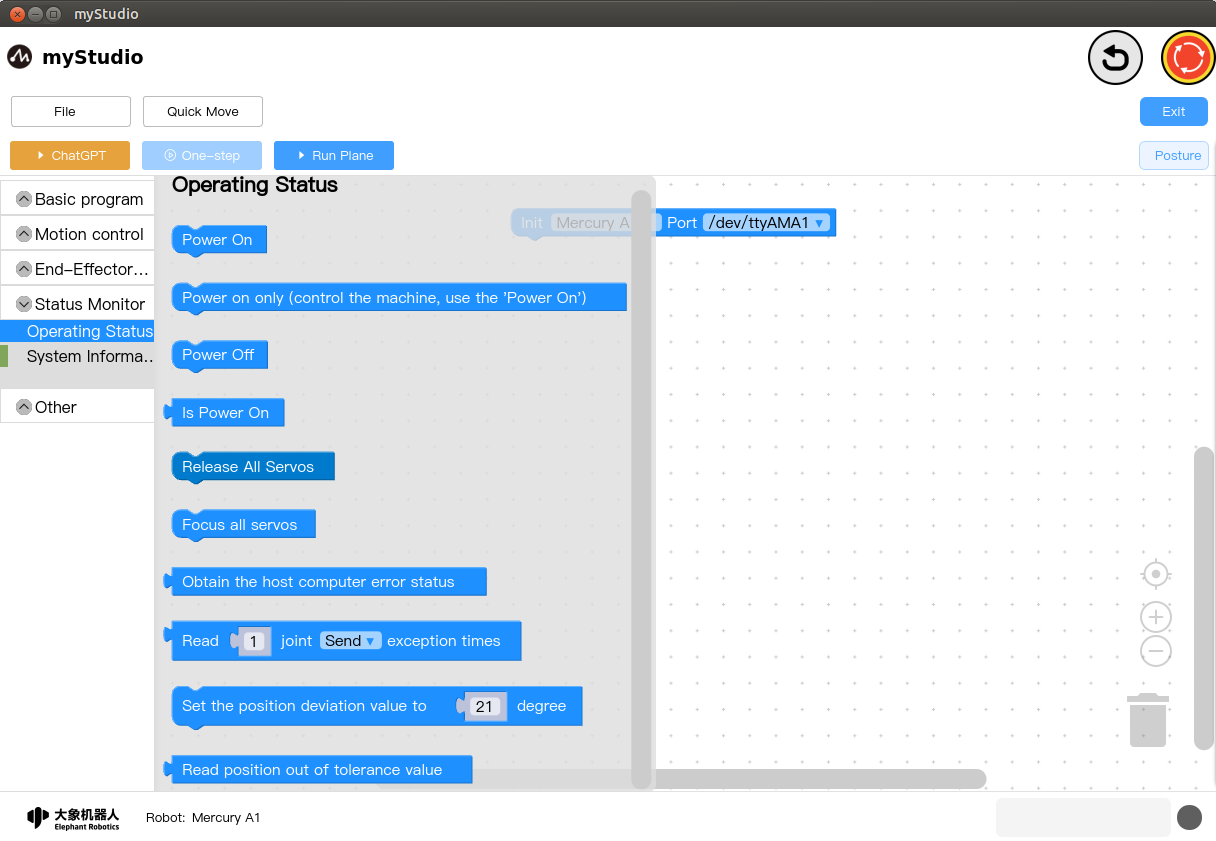
Power On
- Python Prototype:
power_on() - Interface Description: The machine is powered on and can be controlled
Power on only
- Python Prototype:
power_on_only() - Interface Description: When the machine is powered on, the machine is uncontrollable
Power Off
- Python Prototype:
power_off() - Interface Description: the machine is powered off
Is Power On
- Python Prototype:
is_power_on() Interface Description: Check whether the robot arm is powered on
Return:
1: power on0: power off-1: error
Release All Servos
Python Prototype:
release_all_servos()Interface Description: Set the robot arm to free motion mode
Focus all servos
- Python Prototype:
focus_all_servos() - Interface Description: Robot opens torque output
Obtain the host computer error status
- Python Prototype:
get_robot_status() - Interface Description: Obtain the error safety status of the host computer
- Return:
- status information
Read joint exception times
- Python Prototype:
get_comm_error_counts(joint_id,type) - Interface Description: Get the number of joint abnormalities
- Params:
joint_id: joint id: 1-7type: exception type
- Return:
- Number of exceptions
Set the position deviation value
Python Prototype:
set_pos_over_shoot(value)Interface Description: Set the position deviation value
Params:
value: position deviation value
Read position out of tolerance value
- Python Prototype:
get_pos_over_shoot - Interface Description: Read position out-of-tolerance value
- Return:
- Position out of tolerance value
System Information category
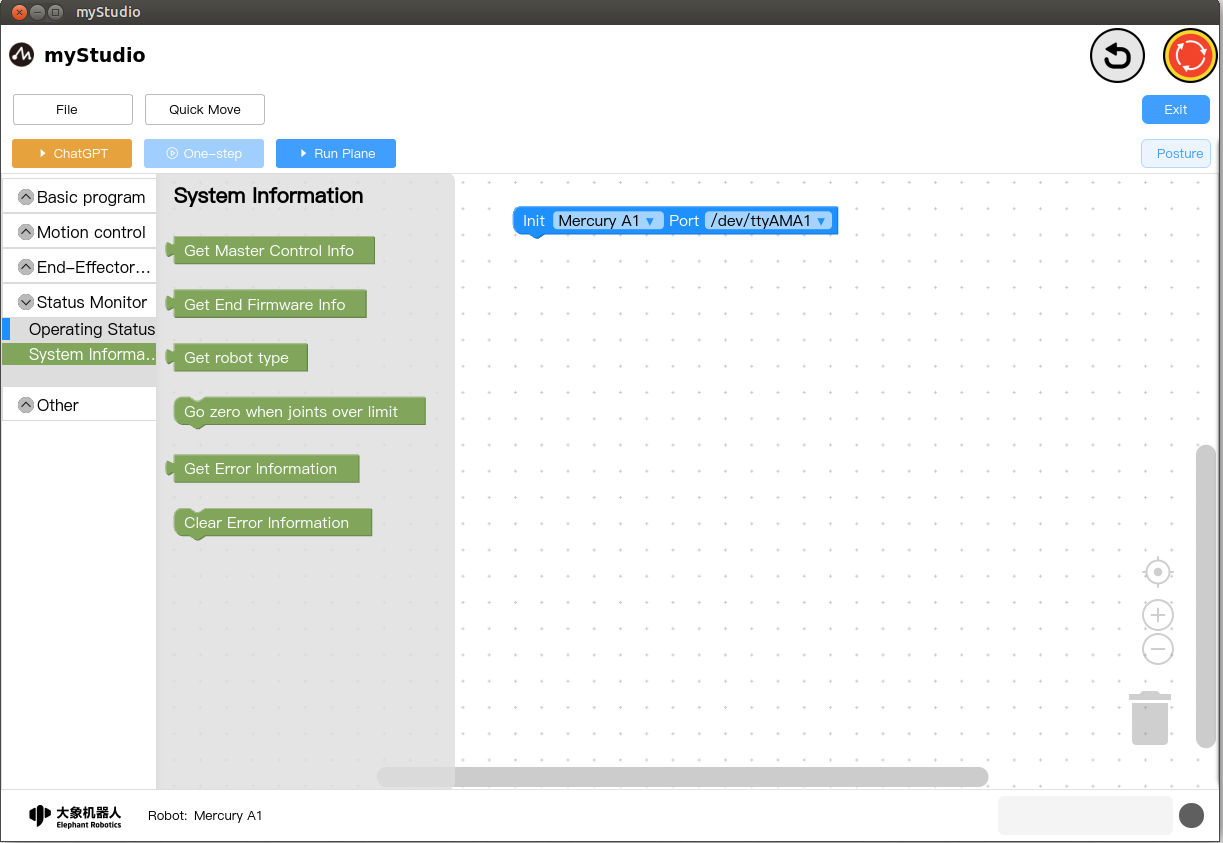
Get Master Control Info
- Python Prototype:
get_system_version() - Interface Description: Get Master Control Info
- Return:
- Master Control Info
Get End Firmware Info
- Python Prototype:
get_atom_version() - Interface Description: Get the terminal firmware version
- Return:
- End firmware version
Get robot type
- Python Prototype:
get_robot_type() - Interface Description: Get the robot model
- Return:
- Get the robot model
Go zero when joints over limit
- Python Prototype:
over_limit_return_zero - Interface Description: The machine returns to zero after exceeding the limit
Get Error Information
- Python Prototype:
get_error_information() - Interface Description: Get error message
- Return:
- Get error message
Clear Error Information
- Python Prototype:
clear_error_information() - Interface Description: Clear error message
Other category
Deflection angle category
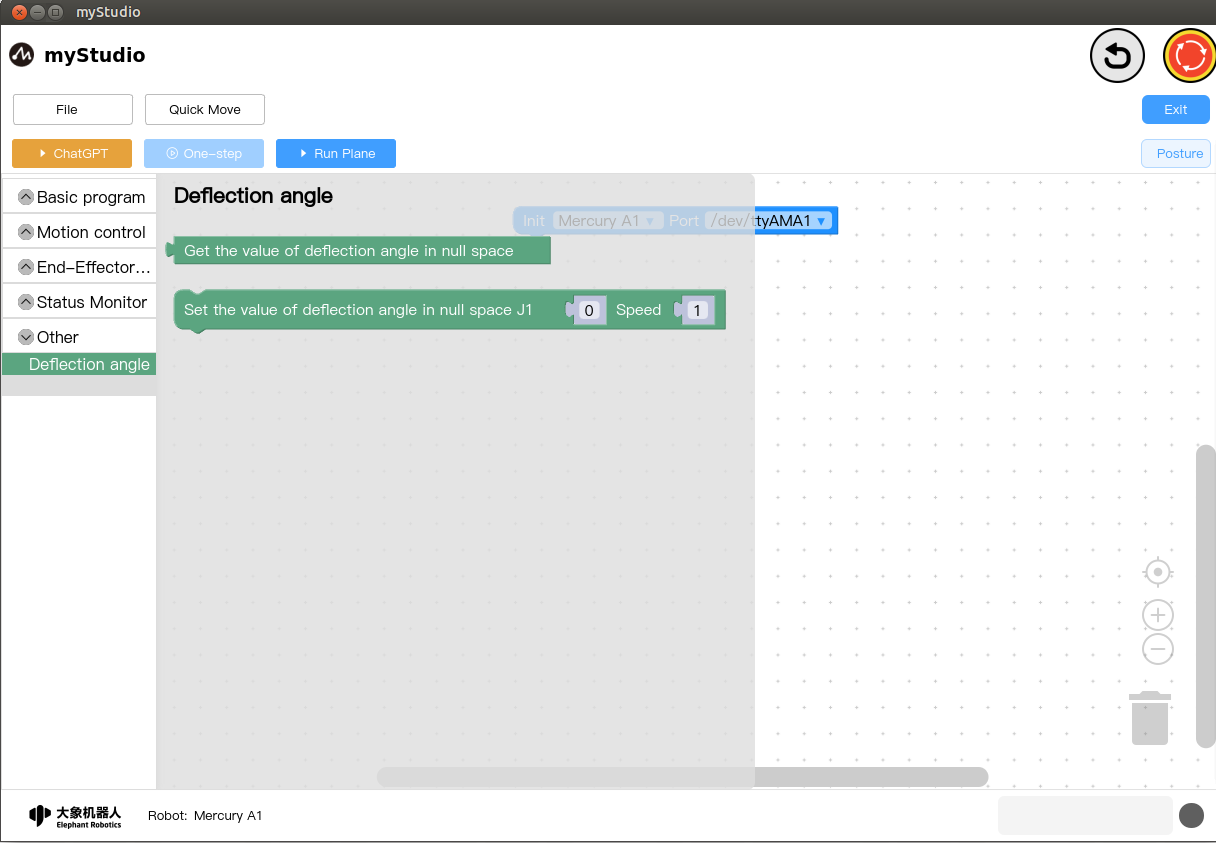
Get the value of deflect angle in null space
- Python Prototype:
get_solution_angles() - Interface Description: Get the zero space deflection angle value
- Return值:
J1_angle_low: -90 ~ +90J1_angle_high: -90 ~ +90
Set the value of deflect angle in null space
- Python Prototype:
set_solution_angles(J1_angle,speed) - Interface Description: Get the zero space deflection angle value
- Params:
J1_angle: -90 ~ +90speed: 1-100