Catalogue
Introduction
1 Product Introduction
1.1 Design Philosophy
1.2 Application Scenario
2 Product Feature
2.1 Functional Parameters
2.2 Controller Parameters
2.3 Structural Parameters
2.4 Electronic Parameters
2.5 Coordinate System
3 User Notes
3.1 Safety Instructions
3.2 Transport and Storage
3.3 Maintenance and Care
3.4 FAQs
4 First Install and Use
4.1 Product Standard List
4.2 Product Unboxing Guide
4.3 Power-on Test Guide
5 Basic Application
5.1 System instruction manual
5.2 Application Use
1 myPanel
2 myStudio
Robot selection
Function selection
Blockly
First time use
Interface introduction
First Case
Quickly fill
Use fast-moving
Use coordinate
chatGPT
Run single block
Program control
Use gripper
Use suction pump
Drag teach
API
Quick Move
Firmware and Applications
Common firmware
Function application
Documentation Manual
Video tutorial
Github
Online mall
Contact us
Settings
Expand
Web server extension
5.3 Firmware Use
1 firmware update info
1 how to burn firmware
6 SDK Development
6.1 Python
1 Environment Building
2 Introduction to API
3 TCP/IP Control
4 Gripper Control
5 Robot Exception Handling
6.2 Robot Operating System 1 (ROS1)
1 Environment Building
2 ROS basics
3 Rviz use
4 Basic function case
6.3 Robot Operating System 2 (ROS2)
1 Environment Building
2 ROS2 basics
3 Rviz2 use
4 Basic function case
6.4 C plus plus (C++)
1 CPlus Download
2 build
3 API
4 example
6.5 Development based on communication protocol packets
7 Examples of Robots Using
8 Documents Download
8.1 Productin formation
8.2 Product Drawings
8.3 Software and Source Code
8.4 System Information
8.5 Publicity Material
9 About Us
9.1 Elephant Robotics
9.2 How to Read
9.3 Contact us
Published with GitBook
In this Chapter:
2.5 Coordinate System
2.5.1 Joint range of motion
joints
range
J1
-165 ~ +165
J2
-50 ~ +120
J3
-165 ~ +165
J4
-165 ~ +1
J5
-165 ~ +165
J6
-75 ~ +255
J7
-165 ~ +165
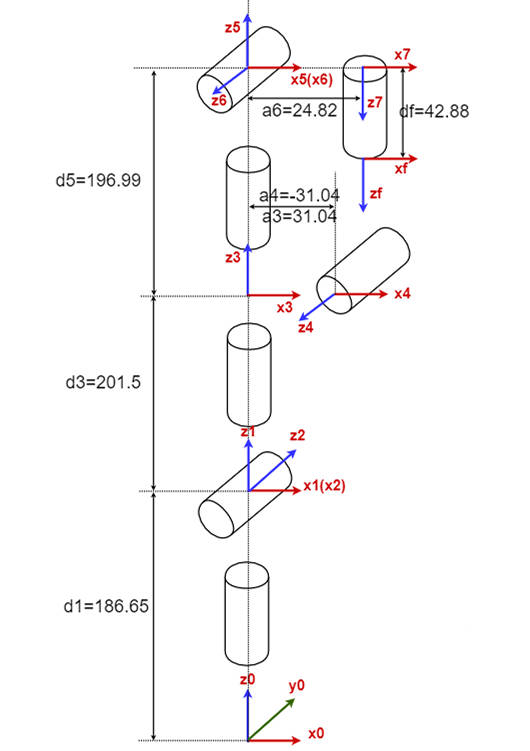
2.5.2 DH parameters
DH model
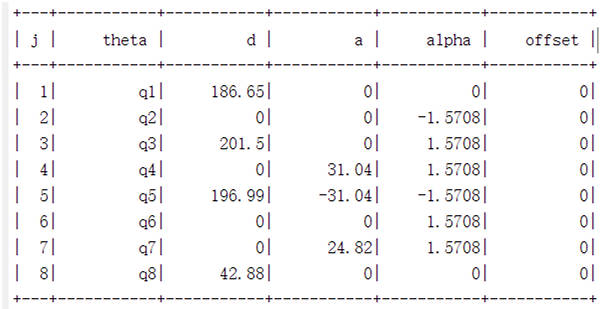
MDH parameter table
results matching "
"
No results matching "
"