Network server
1 Interface introduction
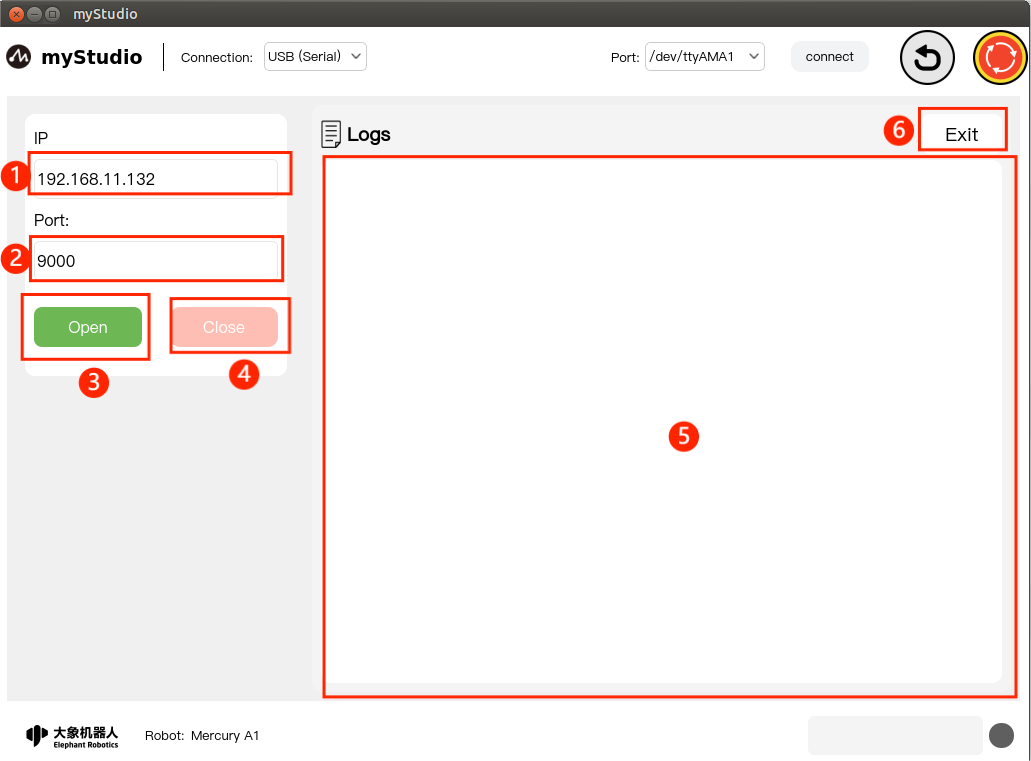
| serial number | Function introduction |
|---|---|
| 1 | The IP address of the robotic arm system network |
| 2 | Network port number |
| 3 | Open the socket service and enable remote connection |
| 4 | Close the socket service and close the remote connection |
| 5 | Log information output area |
| 6 | Exit the network server |
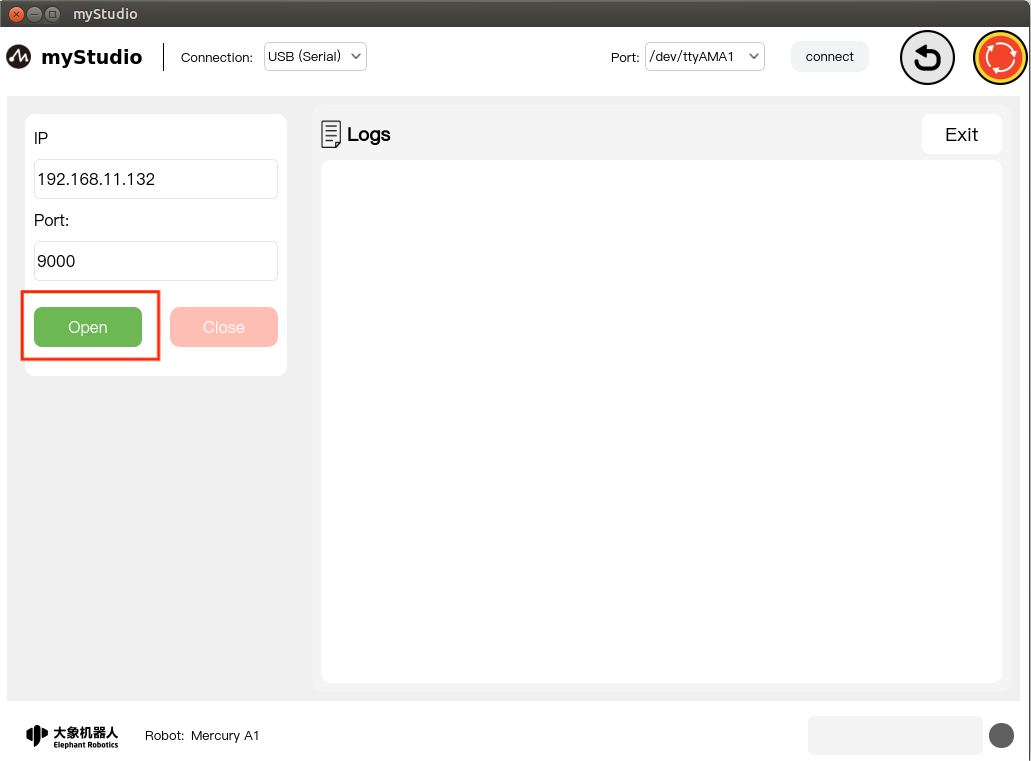
2 Start service
Note: Disconnect device communication before starting the service
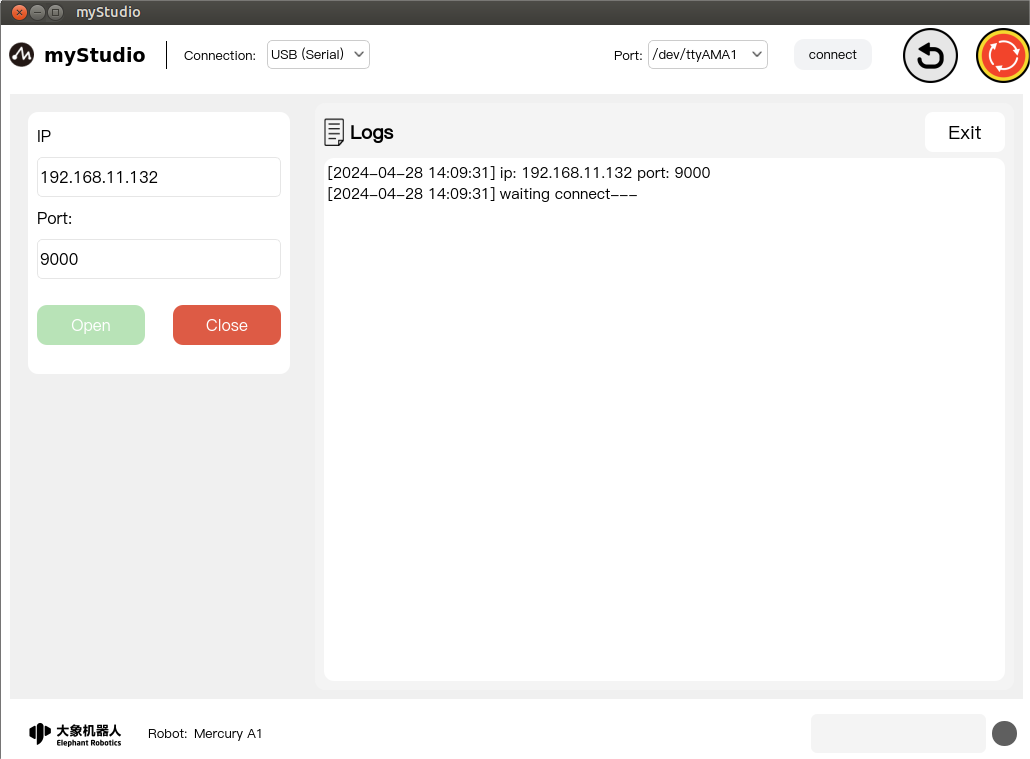
Click the Open button to enable the Socket service.
Successfully opened the Socket service:
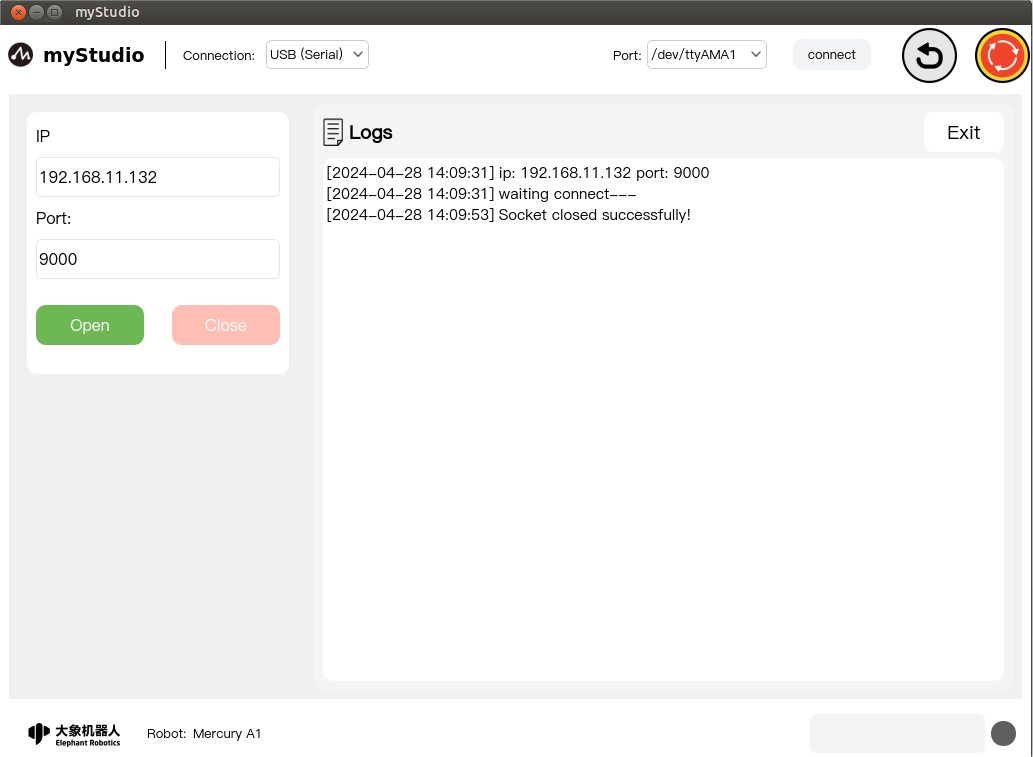
3 Close the service
Note: After closing the service, when opening the service again, you need to change other port numbers, otherwise it will prompt that the port is occupied.
Click the Close button to close the Socket service.

Successfully closed the Socket service:
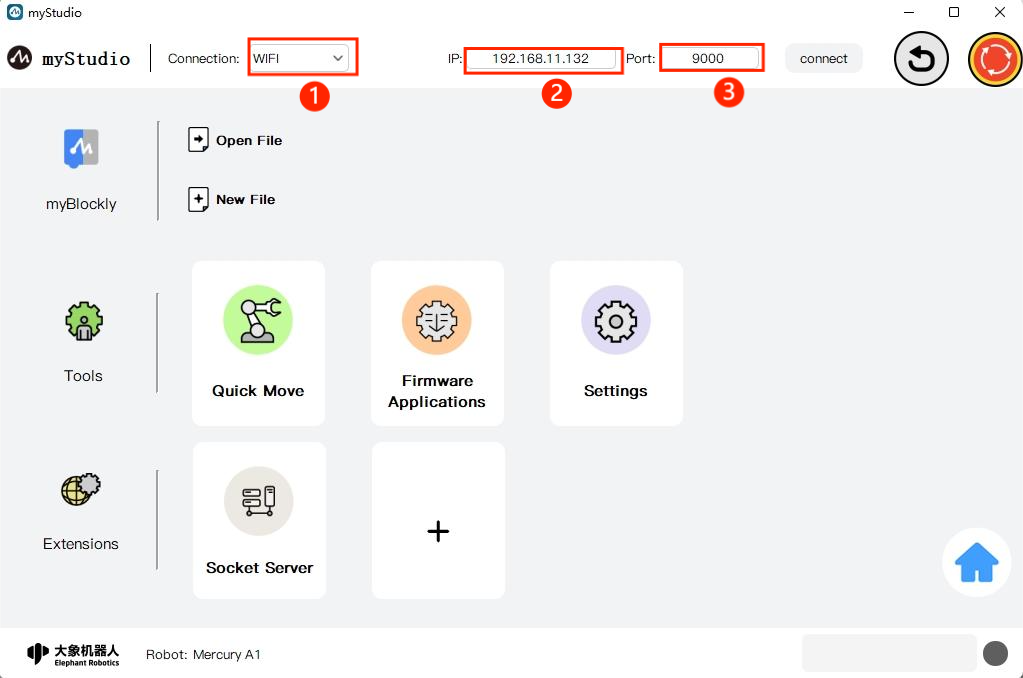
4 Remote connection-1
Note: The network on the PC side needs to use the same network segment as the network on the robotic arm system, that is, use the same network connection.
Open the myStudio software on the PC. After completing the model selection, select network communication and enter the IP address and port number of the network server.
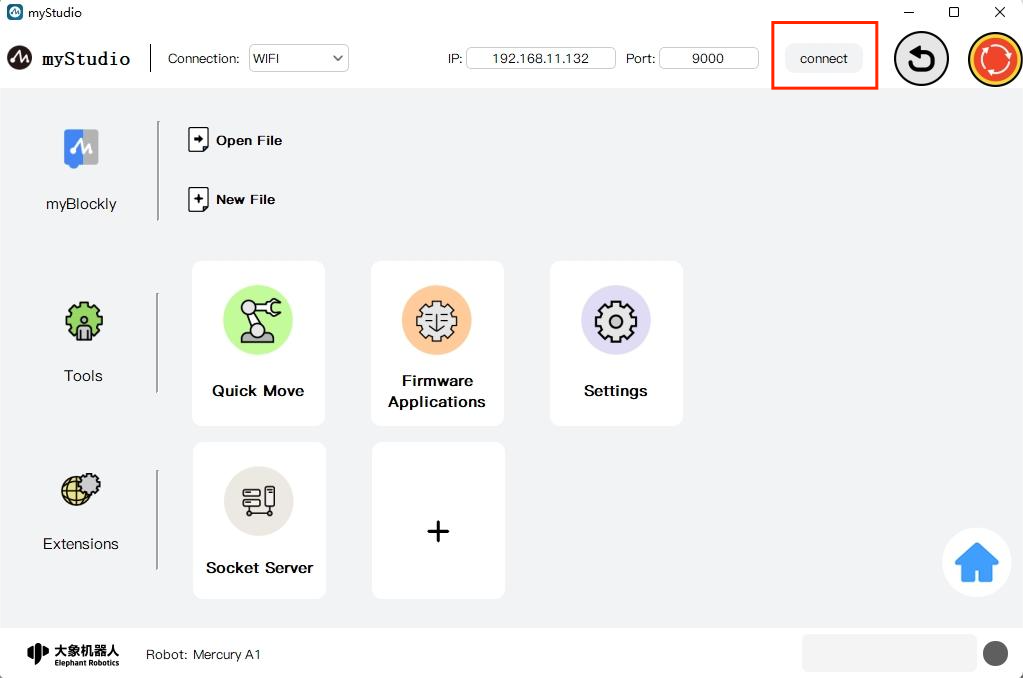
Click the connect button
Click the Quick Move icon button to enter the quick move page.
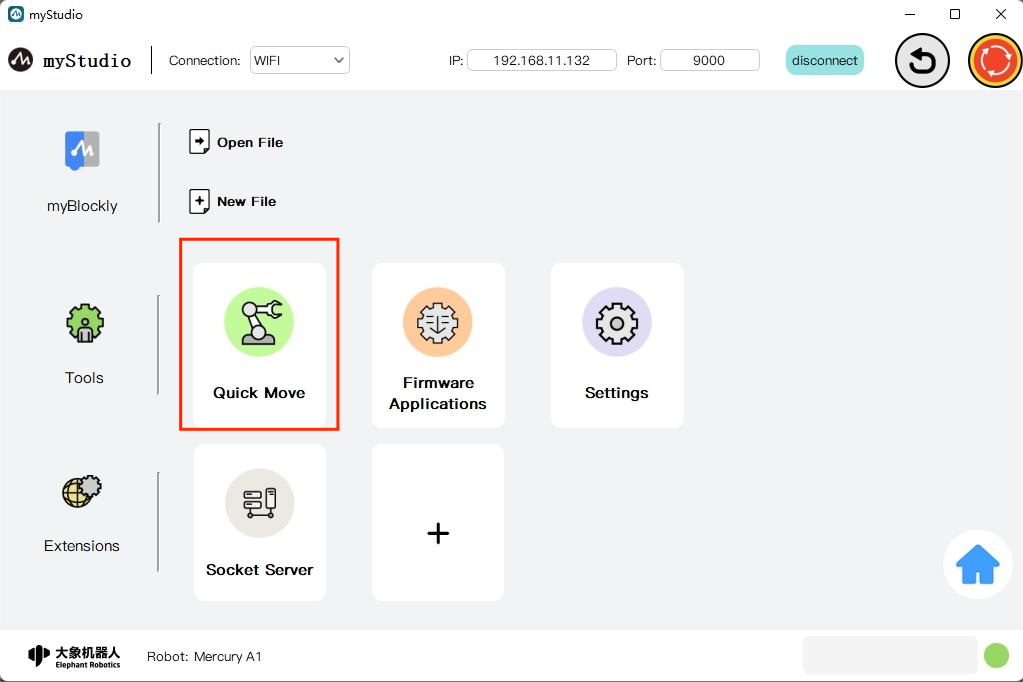
Quickly move the page: According to the corresponding operation, the movement control of the robotic arm is realized.

5 Remote connection-2
Note: The network on the PC side needs to use the same network segment as the network on the robotic arm system, that is, use the same network connection.
MercurySocket class instantiation
# Import the MercurySocket class from the pymycobot library
from pymycobot import MercurySocket
# Connect to robot server
mercury_client = MercurySocket("192.168.11.132", 9000)
Simple angle control
# Import the MercurySocket class from the pymycobot library
from pymycobot import MercurySocket
# Connect to robot server
mercury_client = MercurySocket("192.168.11.132", 9000)
# Joint 1 rotates 50 degrees
mercury_client.send_angle(1, 50, 50)
Note: To use the code programming connection method, the PC needs to have Python and pymycobot environments. For specific installation methods, please see the corresponding gitbook tutorial document. Environment installation tutorial