柔性抓取器专业版
兼容型号: myCobot 320, myCobot Pro 600
产品图片

规格
夹具
| 图片 | 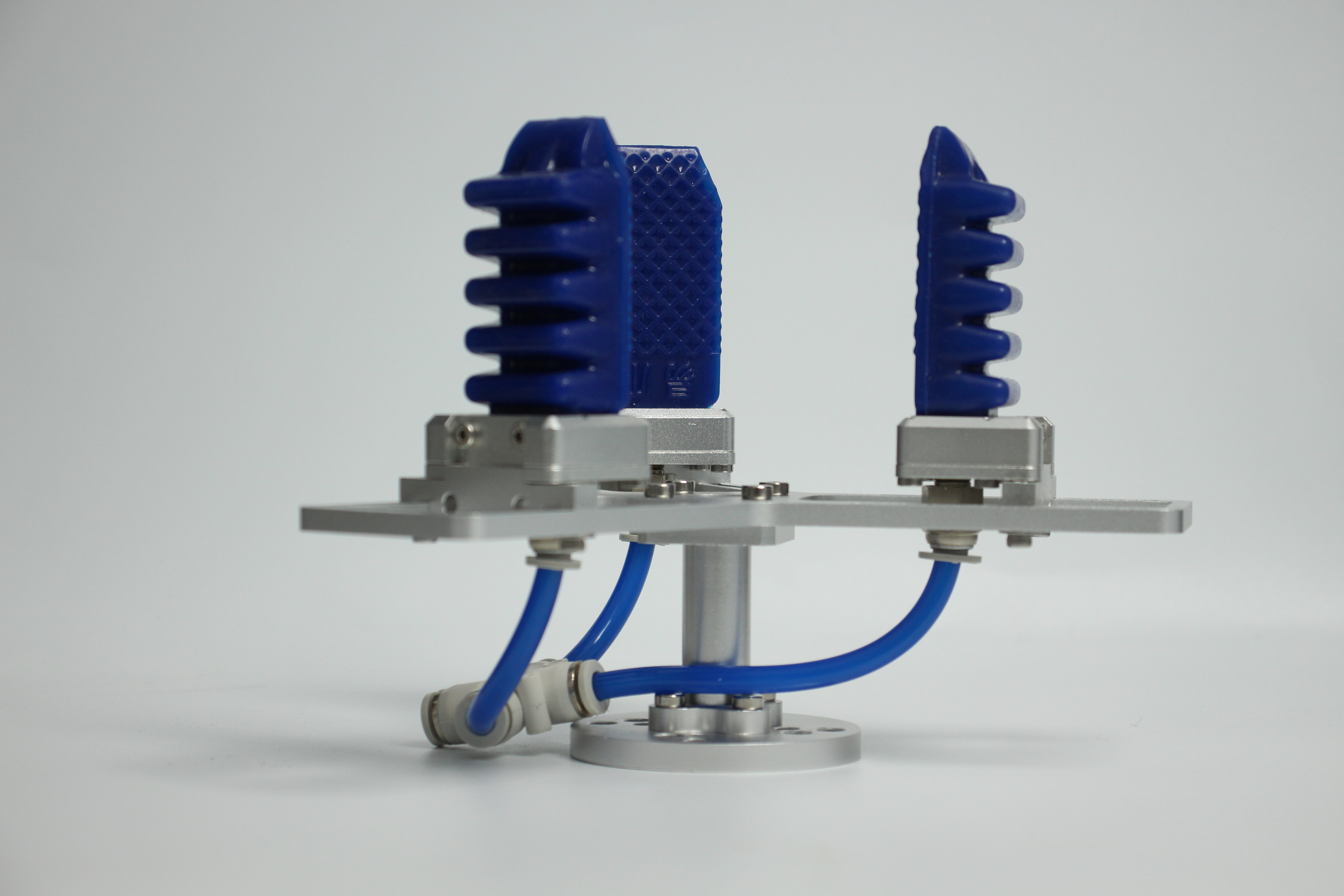 |
|---|---|
| 材料 | 金属 |
| 夹取范围 | 36-136mm |
| 夹紧力 | 垂直 600g 包裹 1080g |
| 重复性精度 | 0.5 mm |
| 使用寿命 | 1 year |
| 驱动模式 | 气动 |
| 变速箱模式 | 形变 |
| 尺寸 | 170x128x195mm |
| 重量 | 365 grams |
| 固定方法 | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 | SAC40A 气动控制器 |
| 适用设备 | ER myCobot 320 series, ER myCobot Pro 600 |
控制器
| 图片 | 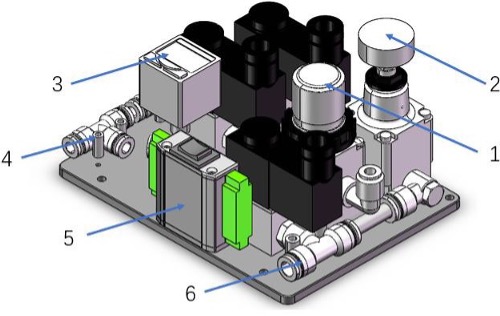 |
|---|---|
| 电源 | 24V 1.5A |
| 控制方式 | IO |
| 气源压力 | > 0.4 MPA |
| 流量 | > 40 L/MIN |
| IO |  |
| Value State | IN1: HIGH & IN2: LOW = 关闭夹爪 IN1: LOW & IN2: HIGH = 开启夹爪 注意 ⚠️:使用 IO 控制时,确保将上述三档拨动开关设置在中间位置。 |
| 船型开关 | 三档拨动开关 |
| 正压 | 夹爪关闭 |
| 负压 | 夹爪打开 |
用于抓取物体
引言
传统的工业吸盘需要吸住材料的平面。在越来越多的工作条件下,吸盘表面很容易损坏面板或部件。触感柔软的夹爪可捏住边缘,轻松抓住面板,不留痕迹,也不会损坏面板,确保产品表面不受破坏。提高成品率。
柔性夹爪采用模块化设计,重量轻,可根据面板尺寸自由排列组合。
传统油缸的夹紧力一般较大,且力难以控制。夹持面板的边缘容易受到挤压和翘曲。弹性夹爪的单指夹紧力精确可控,不会夹住易碎工件。
工作原理
- 软爪是一种创新的仿生软爪,由研究人员模仿海星的胳膊和腿的形状研制而成。软爪的 "手指 "由柔性高分子硅胶材料制成,可以通过充气弯曲变形。它能像海星一样自适应地覆盖目标物体,并能完成对特殊形状和易碎物体的柔性无损抓取。
适用对象
- 合理大小范围内的任何形状的物体
购买链接:
如何使用
1 安装:
气动回路连接和压力调整:在连接到软机械手柄之前,先调节正压(出口可暂时用指尖堵住,确保正压严格小于 100KPA,以免手指受伤)。
用于连接和调节气动回路:首先,在连接软质机械手柄之前设定正压。用指尖暂时堵住出气口,防止空气溢出,确保正压严格控制在 100KPA 以下,以免手指受伤。
连接气源:将气源连接至端口 6(入口),确保压力高于 0.4MPA 且流量超过 40 L/min。
- 连接软机械手柄:将软机械手柄连接到端口 4(出口)。
- 通电:为连接 5 供电。
- 调整正压:使用切换开关选择正压。根据压力表调节调节器,直至达到所需压力。
- 切换至负压:负压调节时,拉起调节器盖,旋转至设定值,然后向下按以锁定。
特别提醒 ⚠️:关于压力保持,正压和负压都可以在启动 0.5 秒后保持,使机械夹爪保持其预设压力。这种方法非常节能,特别是因为持续保持负压会消耗更多空气。此外,它还能防止在意外断电或断气的情况下失去对物体的抓力,确保操作的可靠性。