固件说明
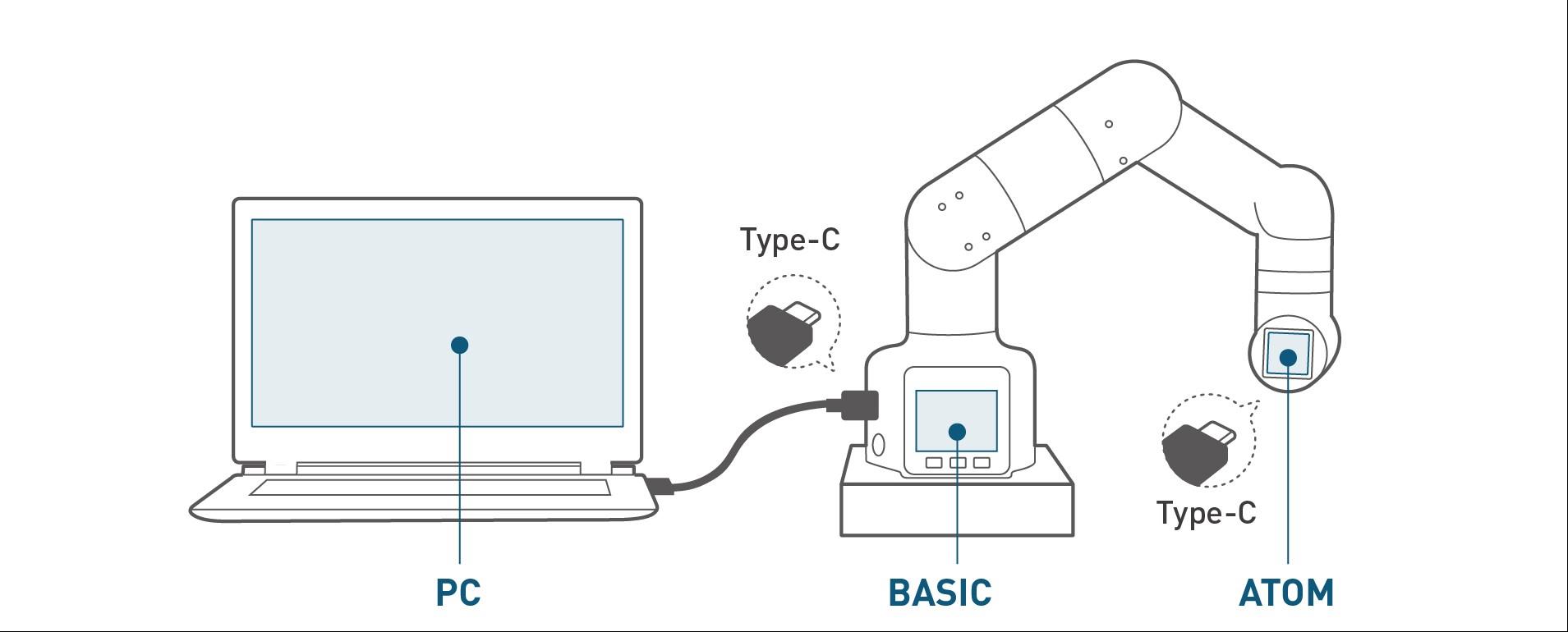
myCobot 320 机器人由三个控制器部件组成:Basic(底座上带有按钮的小屏幕)、Pico(底座上平面 Type-C 接口内的芯片)和 Atom(机器人末端执行器上的 LED 灯板)。
基本控制器负责处理外部交互,将数据转换为机器人可以识别的信息。因此,您可以通过 Basic Type-C 端口使用 USB 线路连接电脑。(在屏幕左侧)。
Pico 控制器管理机器人运动算法、关节控制和底部 IO 控制。(正常使用时无需连接)。
Atom 控制器负责处理来自工具接口和 IO 控制的数据信息。这三个组件共同协作,确保机器人正常运行。(正常使用时无需连接)。
Atom(atommain) 固件更新说明
| 版本 | 固件功能说明(功能项目) | 版本迭代记录 | 固件使用说明 | 适用设备 |
|---|---|---|---|---|
| V1.1 | 机器人控制: 1.单/多角度/坐标控制 2.获取角度/坐标 3. 夹钳、泵控制 4. |
1.该版本要求使用 2020 设备 | ||
| V2.8 | 基本功能保持不变 | 功能修复:修复了运动算法错误 总线修复:修复了已知错误 |
1.在此版本中,基本固件需要刻录到 miniRobotV1.0 中。 | 1.该版本需要在 2020 台设备上使用 |
| V3.1 | 基本功能保持不变 | 功能优化:通信模块优化 功能修复:修复坐标控制 |
1.在此版本中,基本固件需要刻录到 miniRobotV1.0 中。 | 1. 该版本需要一直使用到 2020 年的型号设备 |
| V4.1 | 基本功能保持不变 | 新功能:新增潜在值获取 功能修复: 1.修复了单坐标控制 2. 修复了夹爪移动问题 3. 修复了点动控制 4.修复自由移动 |
1.在此版本中,需要将基本固件刻录到 miniRobotV1.0 中 | 1. 该版本需要在 2020 年的设备中使用 |
| V4.2 | 基本功能保持不变 | 新功能新型电动机械手控制装置 | 1.在此版本中,基本固件需要刻录到 miniRobotV1.0 中。 | 1. 该版本需要在 2020 年的设备中使用 |
| V5.0 (版本号不能与旧版本相同) | 1. 控制 LED 灯 2. Atom io 控制器 |
1.在此版本中,basic 刻录了最新固件 2. 需要伺服固件 支持同步读写 3. Pico 刻录了最新固件 4. |
1. 2022 台设备 - 到目前为止 |
miniRobot 固件更新说明
| 版本 | 固件功能说明(功能项目) | 版本迭代记录 | 固件使用说明 | 适用设备 |
|---|---|---|---|---|
| v1.0 | 1.拖动示教 2. 零点校准 3. 串行通信 4. 信息查看(连接状态、固件版本) 5. |
适用于 atommainV4.1 上一个固件 | 该版本最多需要 2020 设备 | |
| v2.0 | 1. 拖动示教 2. 零位校准 3. 通信(串行端口、wifi、蓝牙通信) 4. 信息查看(联合连接状态、固件版本) |
功能优化: 优化拖动示教,支持在拖动过程中记录速度 新功能 在通信中添加 wifi 和蓝牙通信功能; 错误修正: 关机前同时打开 wifi 和 uart 通信接口。关机前会自动跳转到该接口 |
1. 此版本的 atom 需要烧录到 v5.0 2. 伺服器需要支持同步读写 3. Pico 需烧录至 V1.0 版本 | 2022 device - so far |
| v2.1 | 1. 拖动教学 2. 零位校准 3. 通信(串口、wifi、蓝牙通信) 4. 信息查看(联合连接状态、固件版本) |
修复功能: 1.连续点动控制将导致基本重新启动; 2.拔下插头并重新启动后,需要第二次输入 uart 才能生效; 3.优化拖动教学效果的使用。 |
1. 此版本的 atom 需要烧录到 v5.0 2. 伺服器需要支持同步读写 3. Pico 需要使用 V1.1 进行编程 | 2022 设备--迄今为止 |
| v2.2 | 1. 拖动示教 2. 零位校准 3. 通信(串口、wifi、蓝牙通信) 4. 信息查看(连接状态、固件版本) |
功能优化:bt 升级为 ble,支持蓝牙 5.0,支持使用 Mycobot APP。 修复功能: 拖动示教: 1. 在开始记录前,先放松关节,使其更加敏感; 2. 修复硬件更改后的抖动问题。 1. 拖动教学 2. 零点校准 3. 通信(串口、wifi、蓝牙通信) 4. 信息查看(连接状态、固件版本) |
1. 该版本的 atom 需要与 v5.0 一起烧录 2. 伺服器需要支持同步读写 3. Pico needs to be burned with V1.2 | 2022 设备--迄今为止 |
| v2.3 | 1. 拖动示教 2. 零位校准 3. 通信(串口、wifi、蓝牙通信) 4. 信息查看(连接状态、固件版本) |
基本功能齐全,整体使用效果较好。 优化内容: 1. 零校准,只需校准一次,进入时完全放松(带阻尼),单关节校准时完全放松 2. 拖动示教:录制完成 将自动打开电源,录制过程中末端的 LED 灯将变为黄色,录制结束时将变为绿色; 3. 转发器退出通信时不会掉落。 |
1. 此版本的 atom 需要烧录到 v5.0 2. 伺服系统需要支持同步读写 3. Pico 已烧录至 V1.2 或 V1.3(带阻尼功能) | 2022 设备--迄今为止 |
pico 固件更新说明
| 版本 | 固件功能说明(功能项目) | 版本迭代记录 | 固件使用说明 | 适用设备 |
|---|---|---|---|---|
| V1.0 | 机器人控制通信速度在 20ms 以内 1. 单/多角度/坐标控制; 2. 获取角度/坐标 3. 自适应/电动机械手,系统泵控制... |
1. 该版本的 atom 需要用 v5.0 烧录 2.舵机需要支持同步读写 3.该版本的基本固件需要用 miniRobotV2.0 烧录 4.舵机需要支持同步读写。 |
1 , 2022 年设备--迄今为止 | |
| V1.2 | 机器人控制通信速度在 20ms 以内 1. 单/多角度/坐标控制; 2. 2. 获取角度/坐标 3. 自适应/电动夹爪、系统泵控制 |
新增功能: 1.修改舵机 pdi:上电时保存上次修改的值; 2.适应新的自适应夹持器:与夹紧之前相比增加 io 控制; 优化内容: 1、控制 LED 灯,终端 IO 控制,电夹控制,优化控制可靠性,不会像以前那样点击几下才生效了。 修改内容: 1.释放伺服、释放全舵机,释放时可取消阻尼模式,默认为阻尼模式(接头松弛时有阻力,拖拽困难)。 |
1. 此版本的 atom 需要用 v5.0 烧录 2.舵机需要支持同步读写 3.此版本的基本固件需要用 miniRobotV2.2 烧录 |
1. 2022 年设备--迄今为止 |
| V1.3 | 机器人控制通讯速度在 20ms 以内 1.单角度/多角度/坐标控制; 2. 获取角度/坐标 3.自适应/电动夹持器,系统泵控制... |
修复内容: 1。开机时,初始发送点不会先归零,会正常移动; 2.当在运动过程中停止时,机械臂不会掉落。优化内容:运动控制优化。 |
适用于所有 | 1. 2023 设备--迄今为止 |