通信

本章介绍如何使用内置软件的扩展开发功能。该功能允许您扩展设备的连接选项,并支持不同的开发环境和方法。
目前,通信转发支持三种连接方式:USB、Wi-Fi 和蓝牙。它们适用于不同的功能开发场景。
- USB 和 Wi-Fi 用于连接其他主控设备,通过机器人通信协议,可以控制机器人执行相应命令。
- 蓝牙用于连接移动控制软件,可通过手机实现快速移动控制。
1 适用机械臂
- myCobot 320 M5
2 USB 端口控制
Step1:
- 请确认您已了解产品安全说明,并确保已按照第 4 章所述使用电缆连接设备。
- 打开电源开关,确保紧急停止开关已连接且未按下。
- 确认机器人末端执行器上的 Atom LED 灯板是否亮起,机器人的关节是否有扭矩输出,使关节无法旋转。
Step 2: 按 OK 选择 Transponder 转到转发器主页。

Step 3: 选择要使用的功能,下面以 USB 连接为例。

Step 3: 检查 Atom 状态

atom: ok 表示 Atom 连接正常。
如果所有输出状态均为 "否",请确保设备固件正确无误。再次检查电源连接和急停开关连接,并确认急停开关未被按下。确认后,重新启动设备并重复当前步骤。
Step 4: 选择适当的开发方法,并尝试与机器人通信。更多详情,请参阅 SDK 开发 chapter.
Step 5: 如果要修改连接方式,请按 C 退出。

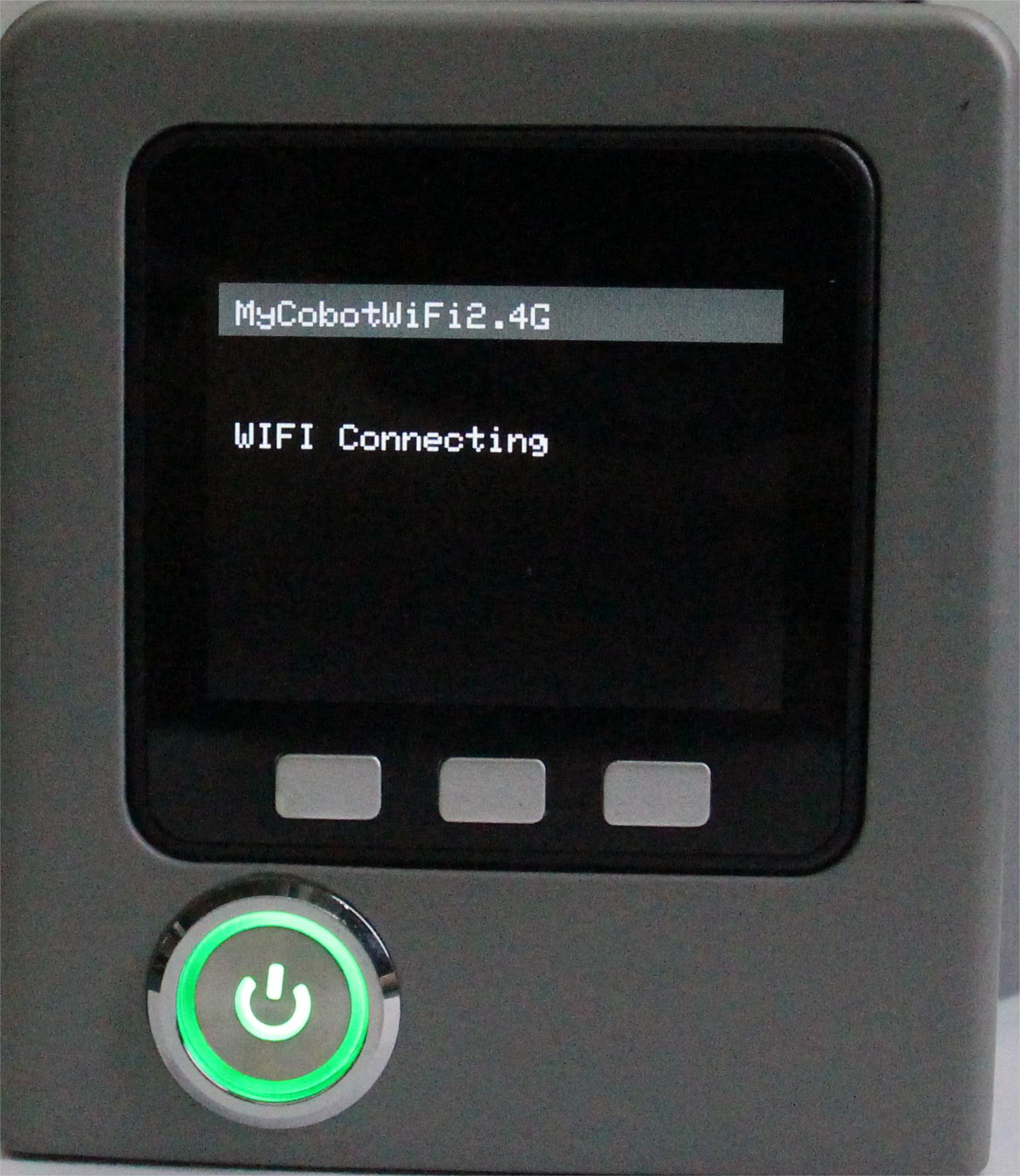
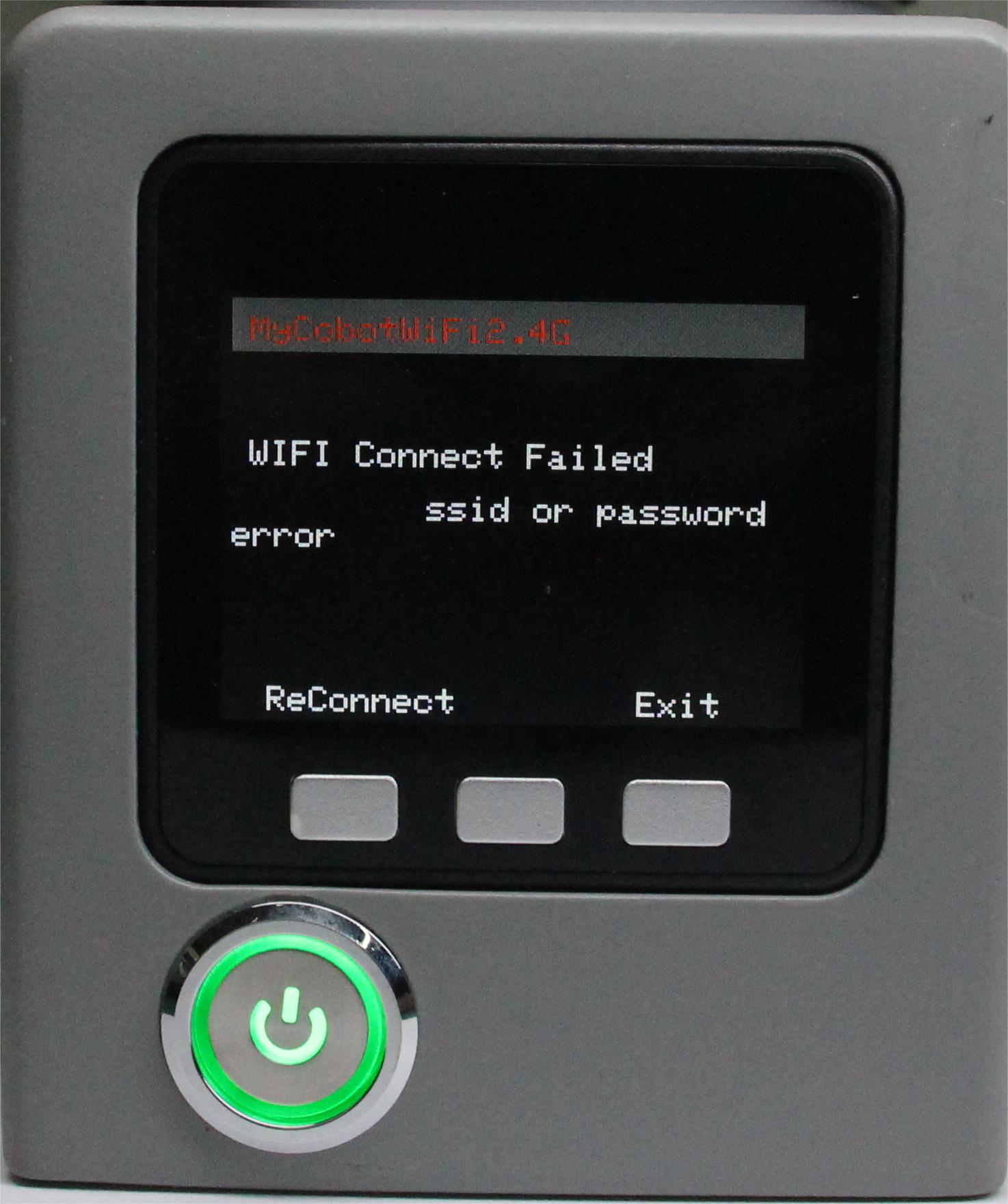
Step 6: 使用WiFi连接,需要将WiFi名称设置为:MyCobotWiFi2.4G,密码设置为:mycobot123。选中WiFi点击OK自动搜索WiFi并连接。
![]()