TCP/IP
TCP/IP 传输协议,即传输控制/网络协议,也叫作网络通讯协议。它是在网络的使用中的最基本的通信协议,对互联网中各部分进行通信的标准和方法进行了规定。用户可以通过机械臂的 IP 地址连接机械臂,达到无需连接 USB 端口也可以远程操作机械臂的效果。
本章以 myCobot 280 M5 为例进行说明。
使用前请确保 M5Stack-basic 和 Atom 均已烧录。
myCobot
连接
1.1 WIFI
请按照以下步骤操作。
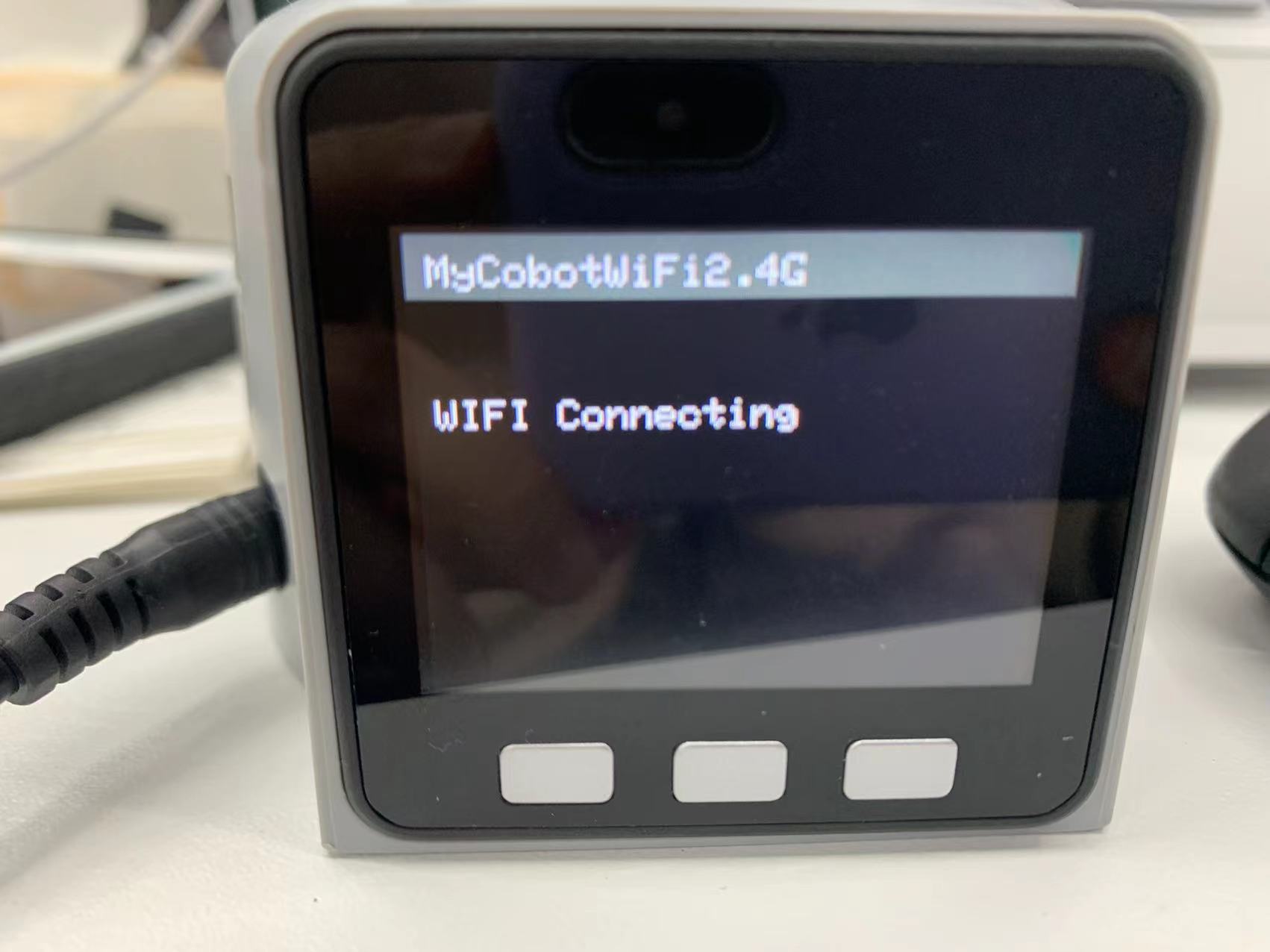
Step 1: 固件烧录完成后点击WlAN Server,出现WIFI Connecting提示,表示无线网络正在连接。

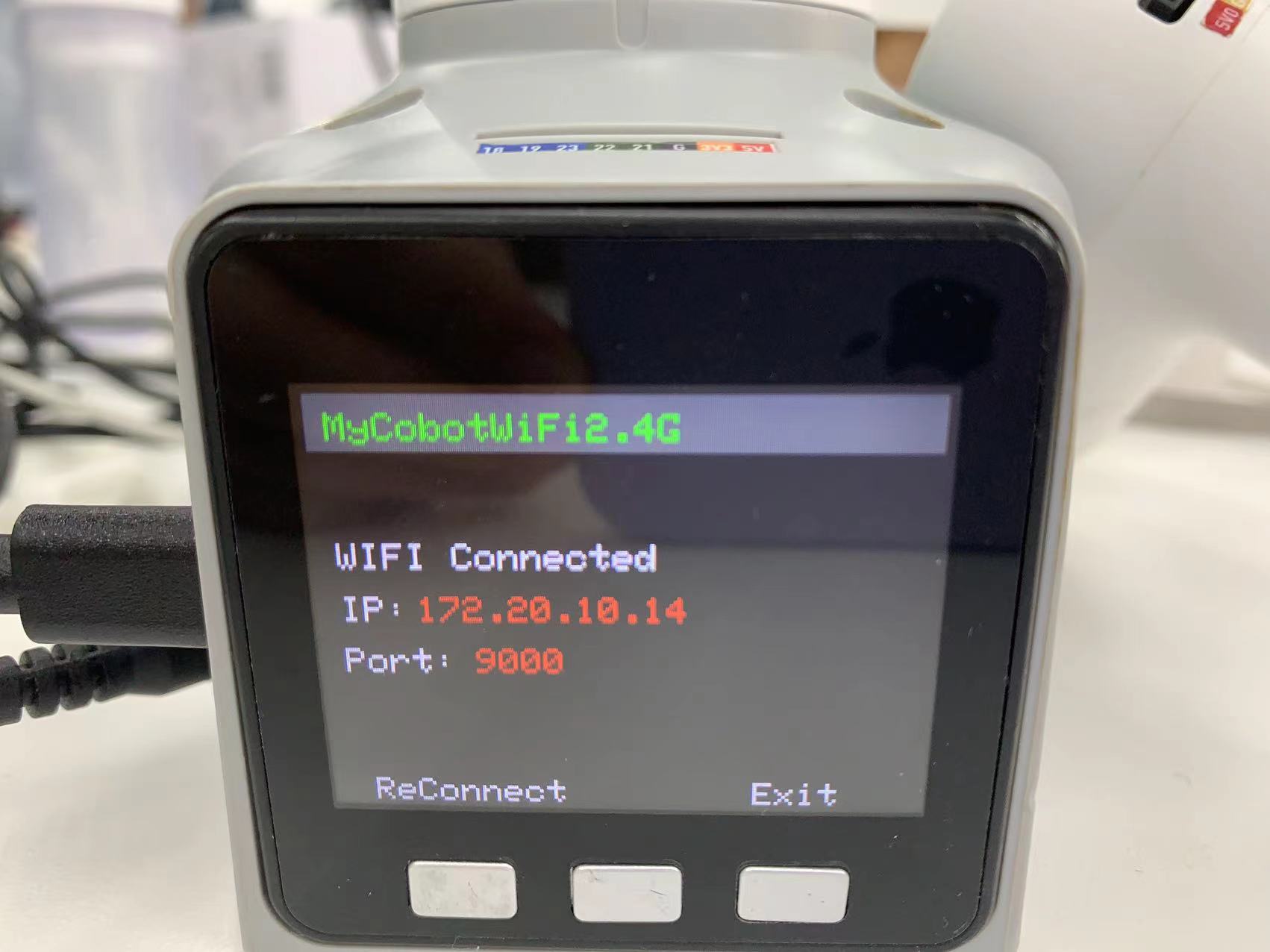
Step 2: 出现 WIFI Connected 以及 IP 和 Port 信息说明 WIFI 已经成功连接。

1.2 移动网络连接
Step 1: 如需使用移动网络与机械臂连接,则需把手机移动热点修改为与机械臂网络一致,即“MyCobotWiFi2.4G”,机械臂移动网络密码为“mycobot123”。


Step 2: 点击 WLAN Server 即可连接。
注意:如果连接失败请返回到 USB UART 选项点击一次再试。
1.3 WIFI 无法连接解决方案
Step 1: 将 atom 和 basic 固件更新到 minirobot v2.0 和 atommain v4.1 版本.
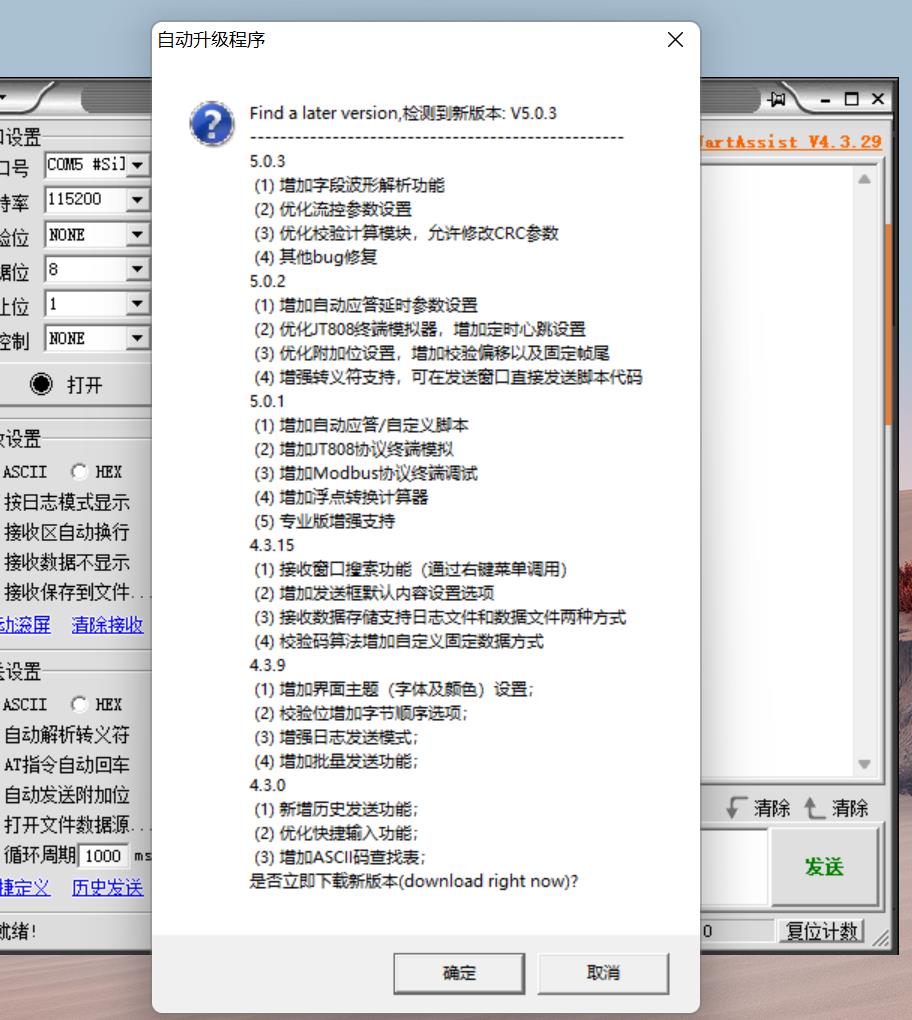
Step 2: 打开 UartAssist.exe。

Step 3: 打开之后注意不要升级软件版本,点击“取消“。
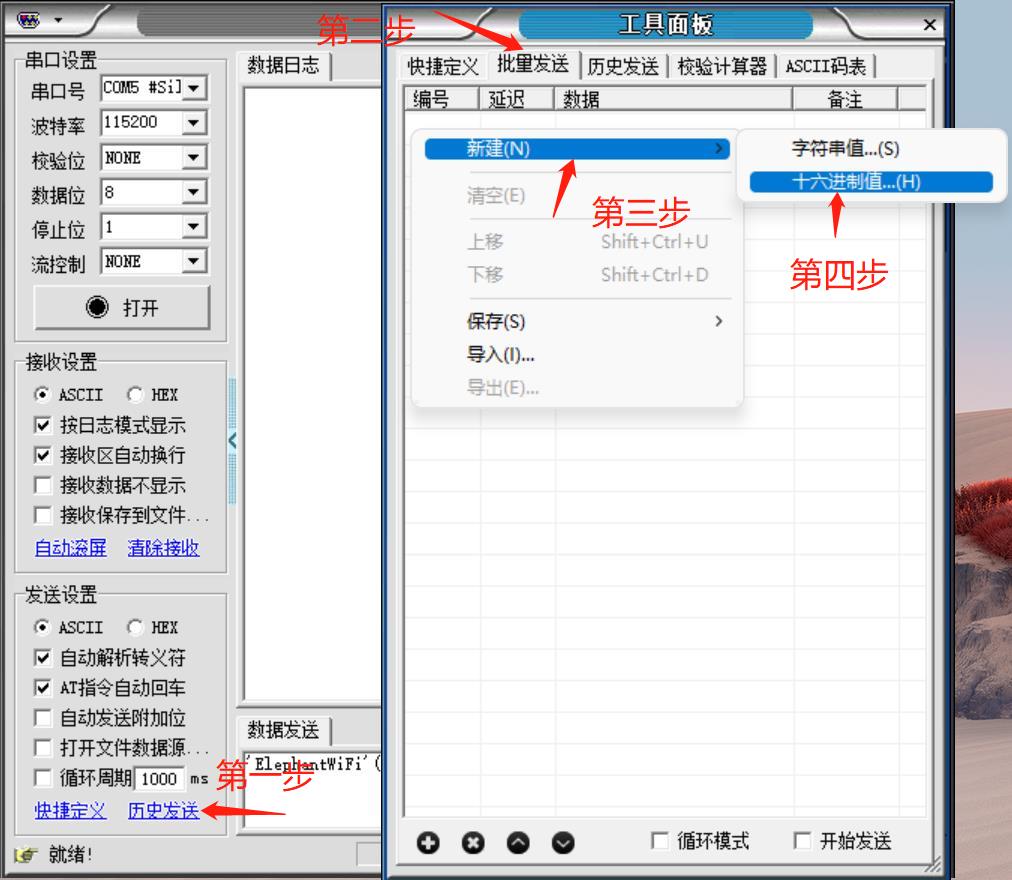
Step 4: 进入 APP 后,点击“历史发送”,点击“批量发送”,空白处右键,点击“新建”,选择“十六进制值”。
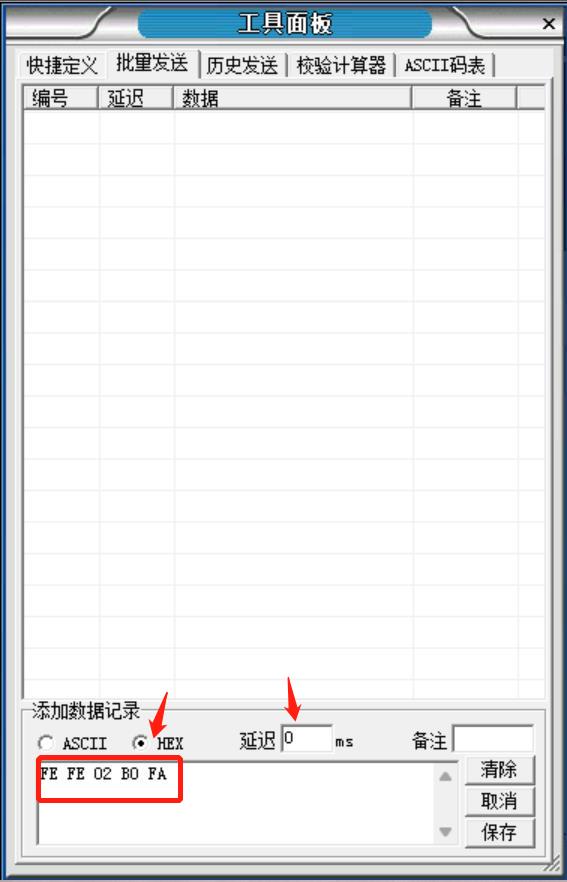
Step 5: 数据类型选择 HEX,输入 FE FE 02 B0 FA,延迟修改为 0,点击“保存”。
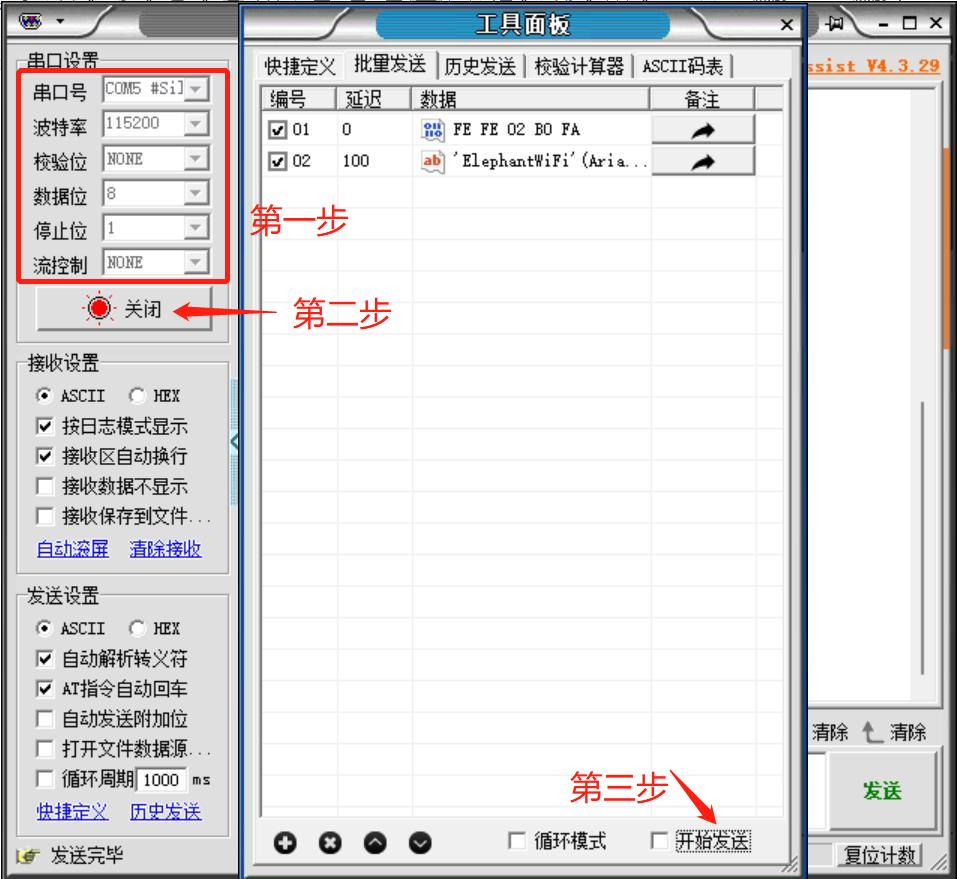
步骤 6: 按照下图所示设置继续添加项目。记住在空白框中输入您的个人 WIFI 名称和密码。确保 WIFI 名称周围有引号(英文),密码周围有括号(英文)。然后保存。

Step 7: 以上设置完成后需要操作机械臂 basic 进入 Transponder,选择 USB UART。
Step 8: 选择串口号,点击“打开”,选中这两个指令,点击“开始发送”。
Step 9: 此时可以看到发送的数据会有反馈。

Step 10: 操作机械臂 basic 选择 WALN Server,就可以正常连接 WiFi 了。
