积木块接口详解
本章介绍 blockly 中积木块的含义与输入项的解释。
基础编程分类中的积木块不在本章讨论范围中
一些说明:
1、接口解释中的 python 原型,在这里可以找到。
2、有返回值的接口需要搭配基础编程分类下文本分类中的输出积木块使用。运行代码时,输出积木块会再打印出返回值。
比如:
错误使用:
正确使用:
运动控制
拖动示教分类接口
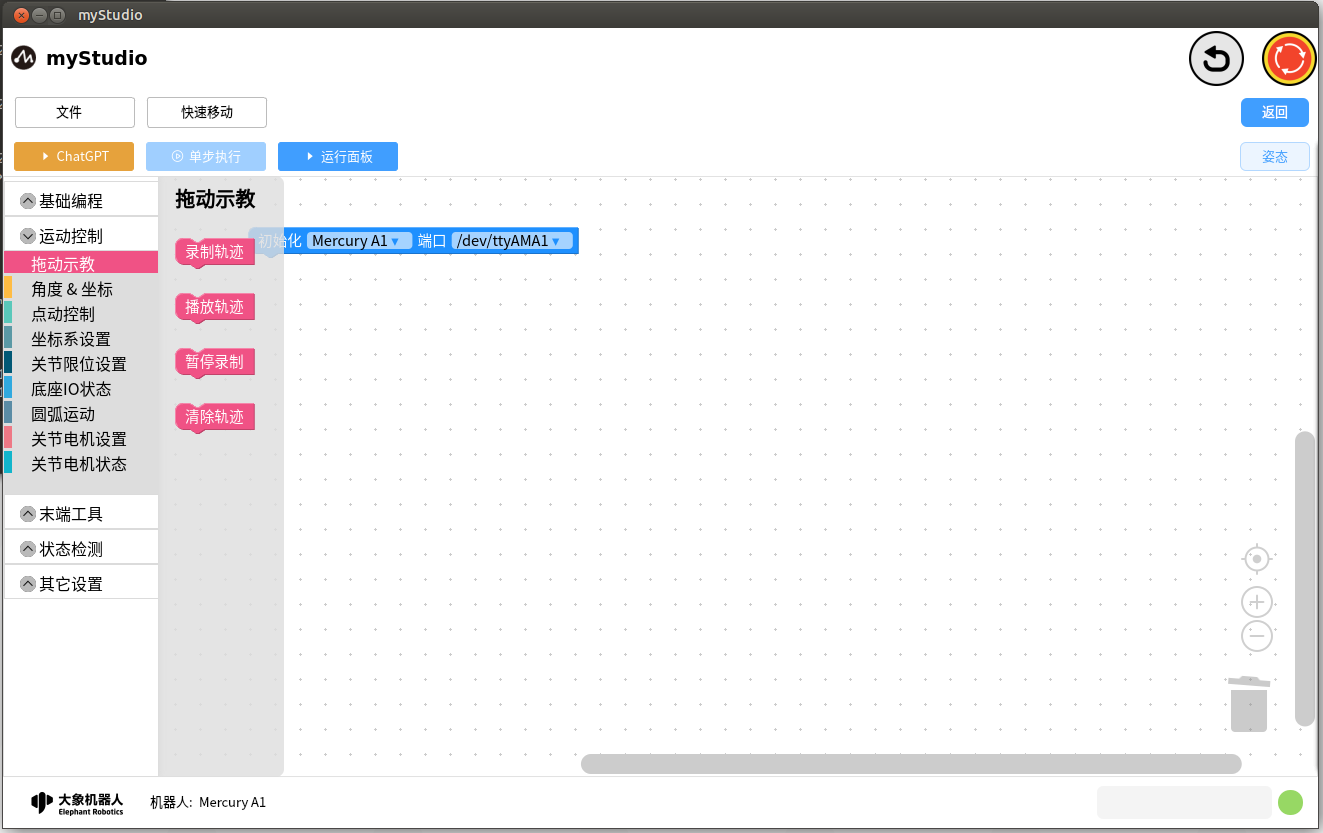
录制轨迹
python接口原型:
drag_tech_save()接口说明:使用后,机械臂会放松,可以被用户拖动,并且会实时记录用户拖动的轨迹。
播放轨迹
python接口原型:
drag_tech_execute()接口说明:播放用户录制的轨迹
暂停录制
- python接口原型:
drag_tech_pause() - 接口说明:暂停录制。机械臂会锁紧,不可被拖动。
清除轨迹
python接口原型:
drag_teach_clean()接口说明:清除用户录制的轨迹
角度 & 坐标 分类
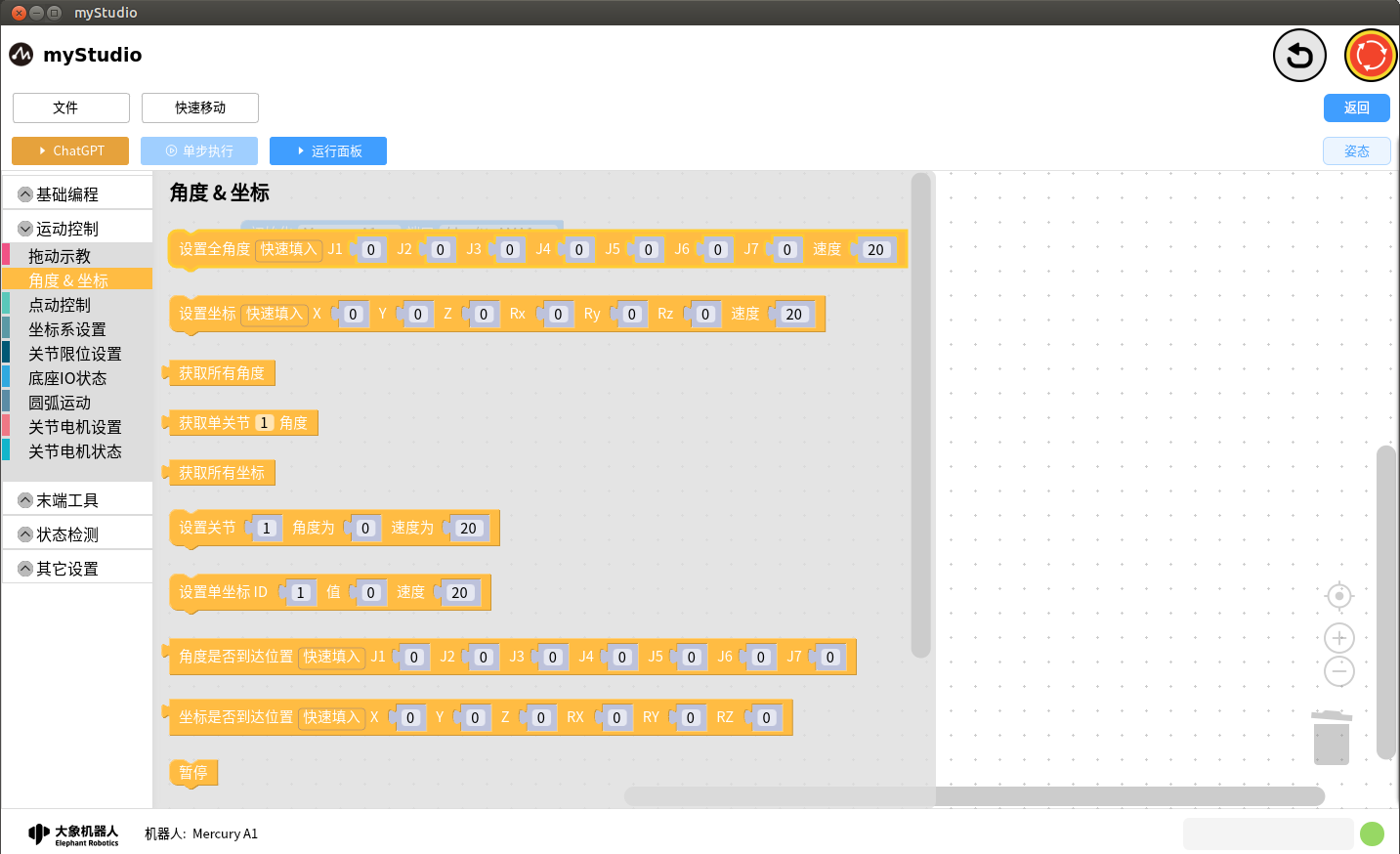

设置全角度
- python接口原型:
send_angles(angles,speed) 接口说明:将所有角度发送至机械臂。
参数
angles:坐标值列表(List[float])速度: (int) 0 ~ 100
设置坐标
python接口原型:
send_coords(coords,speed,mode)接口说明:将所有坐标发送至机械臂。
参数
coords:坐标值列表(List[float])speed: (int) 0 ~ 100
获取所有角度
python接口原型:
get_angles()接口说明:获取所有关节的度数
返回:
- 关节角度值
读取单关节角度
python接口原型:
get_angle(id)接口说明:获取机器人单关节角度控制
参数
id:关节 ID:1-7degree:角度值
获取所有坐标
python接口原型:
get_coords()接口说明:
- 获取笛卡尔坐标
设置单关节角度
python接口原型:
send_angle(id, degree, speed)接口说明:机器人单关节角度控制
参数
id:关节 ID:1-7degree:角度值speed:速度
设置单个坐标
- python接口原型:
send_coord(id, value, speed) 接口说明:机器人单坐标控制
参数
id:坐标:1-6分别对应x、y、z、rx、ry、rzvalue:坐标值speed:速度
角度是否到达位置
python接口原型:
is_in_position([j1,j2,j3,j4,j5,j6,j7],0)接口说明:检查机器角度是否到达指定位置
参数:
j1:j1角度值j2:j2角度值j3:j3角度值j4:j4角度值j5:j5角度值j6:j6角度值j7:j7角度值
返回:
0:未到达指定位置
1:到达指定位置
坐标是否到达位置
python接口原型:
is_in_position([x,y,z,rx,ry,rz],1)接口说明:检查机器角度是否到达指定位置
参数:
x 坐标值
y 坐标值
z 坐标值
rx坐标值
ry坐标值
rz坐标值
返回:
- 0:未到达指定位置
- 1:到达指定位置
暂停
- python接口原型:
pause - 接口说明:进入暂停状态,暂停机器的所有运动。
恢复
- python接口原型:
resume - 接口说明:退出暂停状态,恢复机器运动。
停止
- python接口原型:
stop - 接口说明:停止机器的一切运动。
是否已暂停
- python接口原型:
is_paused - 接口说明:检测机器是否处于暂停状态。
- 返回:
- 0:不处于暂停状态
- 1:处于暂停状态
- -1:错误
检测是否在运动
- python接口原型:
is_moving(id, value, speed) - 接口说明:检测机器是否在移动。
- 返回:
- 0:机器不运转
- 1:机器正在运转
- -1:机器数据错误
点动控制 分类
所谓点动控制即控制机械臂往正或反方向运动,知道运动到限位为止

点动控制关节
python接口原型:
jog_angle(joint_id,direction,speed)接口说明:点动控制角度。控制关节往正或反方向运动,直到运动到关节限位。
参数
joint_id: (int) 关节id:1 ~ 7direction:方向:1 / 0speed: 速度:0 ~ 100
点动控制坐标
python接口原型:
jog_coord(coord_id,direction,speed)接口说明:点动控制坐标。控制坐标往正或反方向运动,直到运动到关节限位。
参数
coord_id: 坐标id:1 ~ 6(对应 X、Y、Z、RX、RY、RZ)direction:0- 减少,1- 增加speed: 速度0 ~ 100
角度步进模式
python接口原型:
jog_increment_angle(joint_id,value,speed)接口说明:角度步进模式。控制关节在当前角度值下再加上给定的 value 值
参数
joint_id: (int) 关节id:1 ~ 7value:增量值speed: 速度:0 ~ 100
坐标步进模式
python接口原型:
jog_increment_coord(coord_id,value,speed)接口说明:坐标步进模式。控制坐标在当前值下再加上给定的 value 值
参数
coord_id: 坐标id:1 ~ 6(对应 X、Y、Z、RX、RY、RZ)value: 增量值speed: 速度0 ~ 100
坐标系设置分类
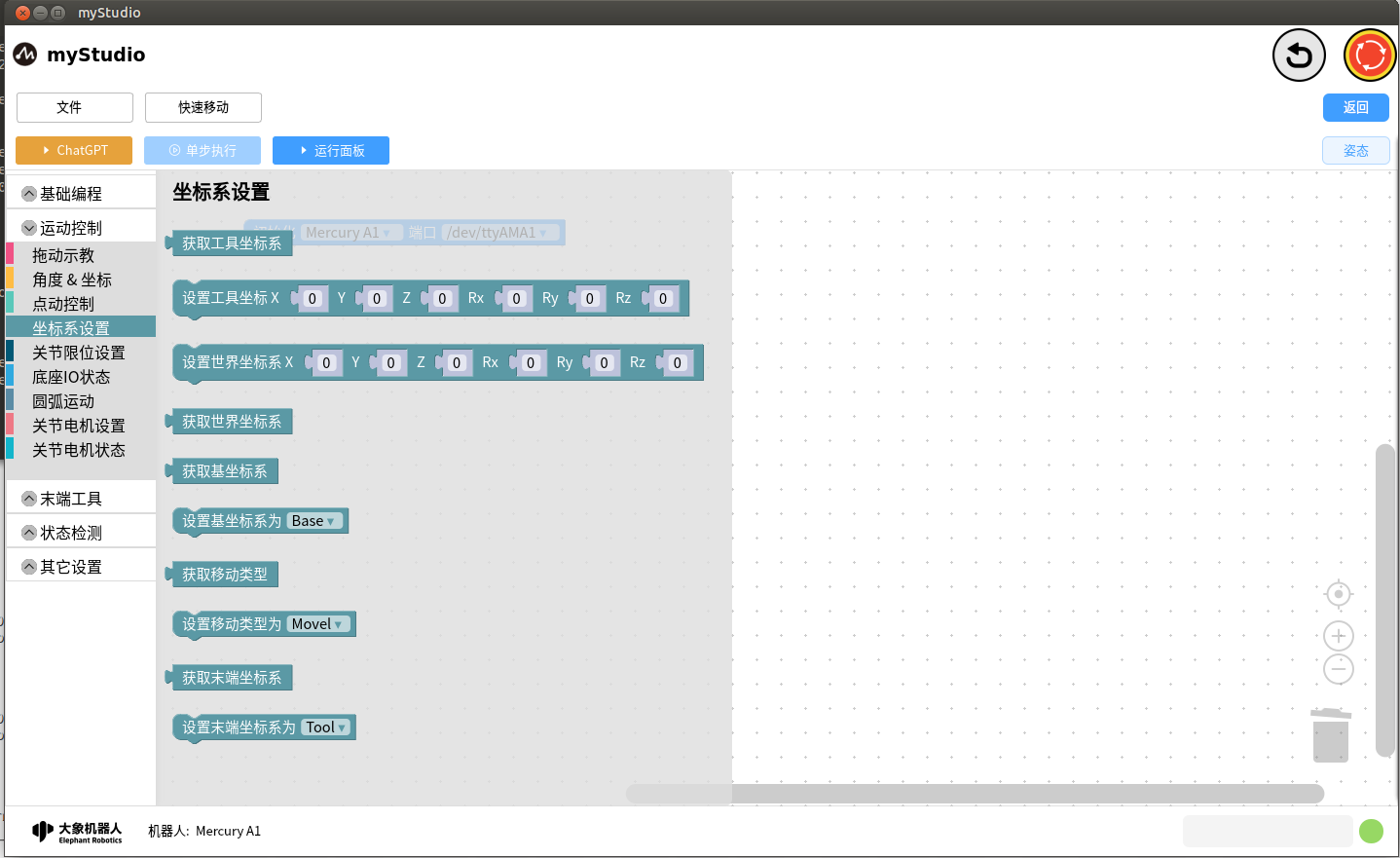
获取工具坐标系
- python接口原型:
get_tool_reference() - 接口说明:获取工具坐标系。
- 返回:
(list)[x,y,z,rx,ry,rz]
设置工具坐标系
- python接口原型:
set_tool_reference(coords) - 接口说明:设置工具坐标系。
- 参数:
(list)[x, y, z, rx, ry, rz]。
获取世界坐标系
- python接口原型:
get_world_reference() - 接口说明:获取世界坐标系。
- 返回:
(list)[x, y, z, rx, ry, rz]。
设置世界坐标系
python接口原型:
set_world_reference(coords)接口说明:设置世界坐标系。
参数:
coords: (list) [x, y, z, rx, ry, rz]。
获取基坐标系
- python接口原型:
get_reference_frame() - 接口说明:获取基础坐标系。
- 返回:
- 0 - 基础
- 1 - 工具。
设置基坐标系
python接口原型:
set_reference_frame(rftype)接口说明:设置基础坐标系。
参数:
rftype:0 - 基础 1 - 工具。
获取移动类型
- python接口原型:
get_movement_type() - 接口说明:获取运动类型。
- 返回:1 - movel,0 - moveJ。
设置移动类型
python接口原型:
set_movement_type(move_type)接口说明:设置运动类型。
参数:
move_type:1 - movel,0 - moveJ。
获取末端坐标系
- python接口原型:
get_end_type() - 接口说明:获取末端坐标系。
- 返回:0 - 法兰,1 - 工具。
设置末端坐标系
python接口原型:
set_end_type(end)接口说明:设置结束坐标系。
参数:
end:0 - 法兰,1 - 工具。
关节限位设置 分类
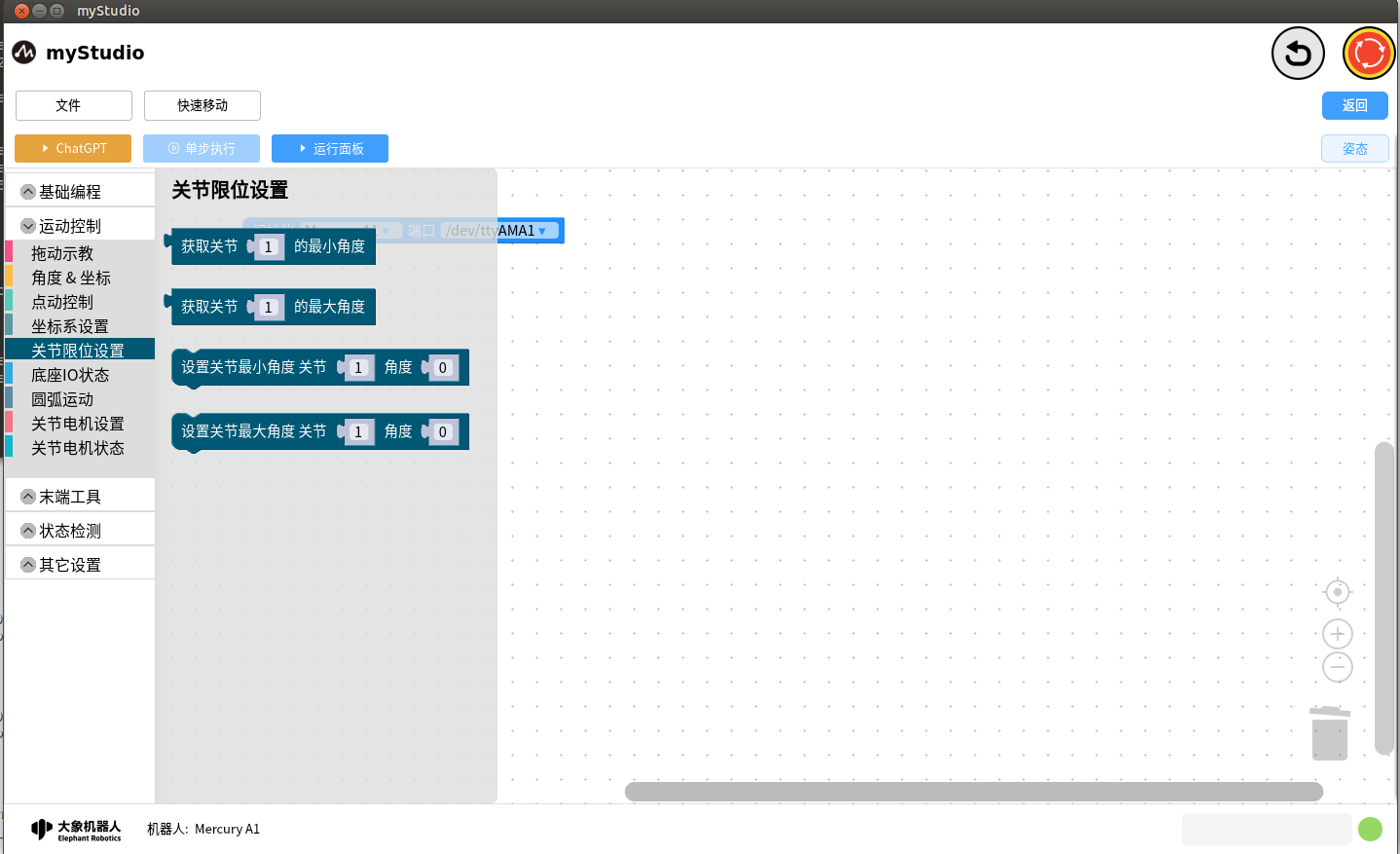
获取关节最小角度
- python接口原型:
get_joint_min_angle(joint_id) - 接口说明:获取指定关节的最小运动角度
- 参数:
joint_id:(int) - 返回:
- 角度值(
float)
- 角度值(
获取关节最大角度
- python接口原型:
get_joint_max_angle(joint_id) - 接口说明:获取指定关节的最大运动角度
- 参数:
joint_id:(int) - 返回:
- 角度值(
float)
- 角度值(
设置关节最小值角度
- python接口原型:
set_joint_min(id, angle) 接口说明:设置指定关节的最小角度。
参数:
关节id角度
设置关节最大角度
- python接口原型:
set_joint_max(id, angle) 接口说明:设置指定关节的最大角度。
参数:
关节id角度
设置底座IO状态分类
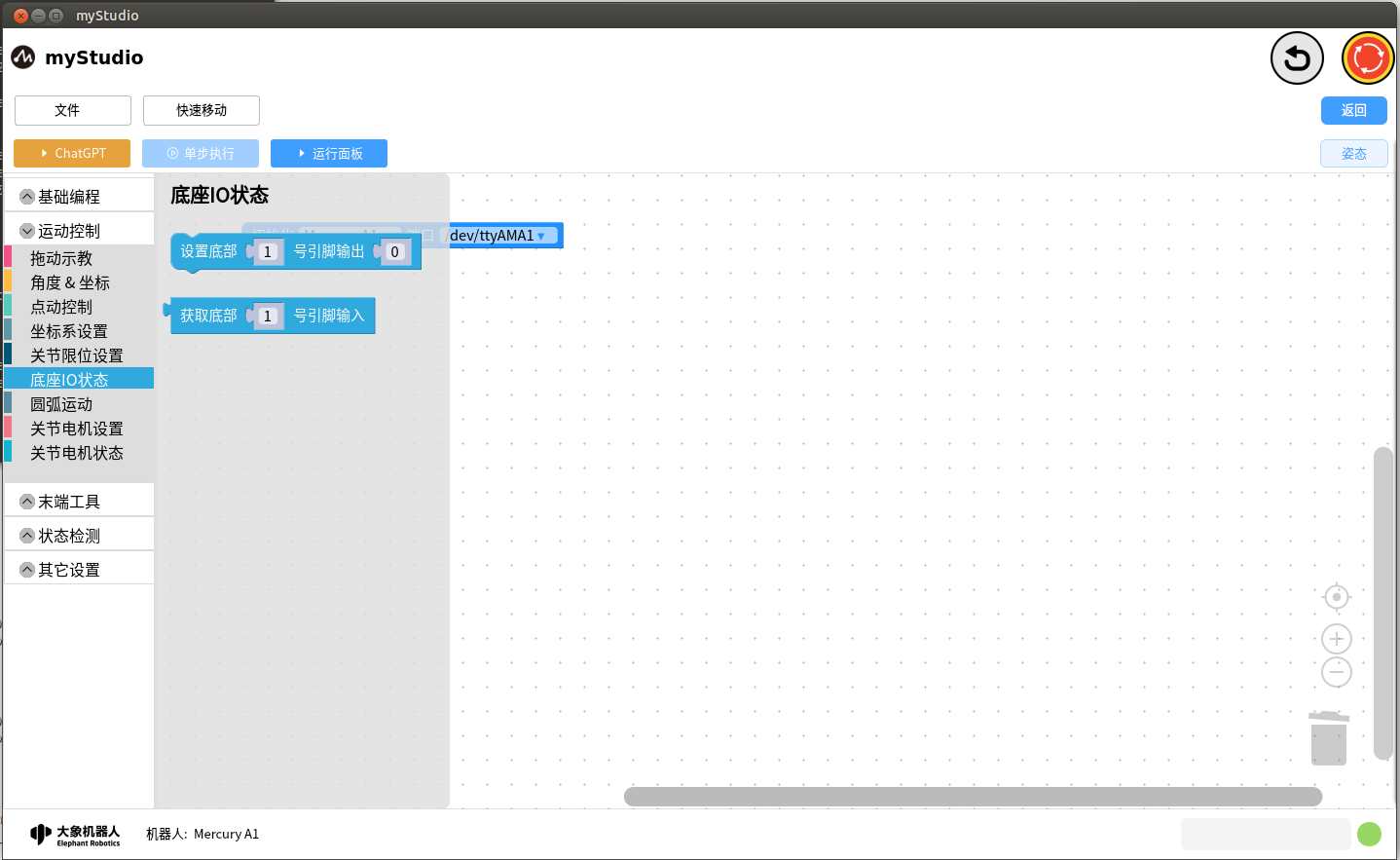
设置底座引脚输出
- python接口原型:
set_basic_output(id,state) - 接口说明:设置底座引脚输出
- 参数:
id:引脚号state:选择输出状态
获取底座引脚输入
- python接口原型:
set_basic_output(id) - 接口说明:获取底座引脚输入
- 参数:
id:引脚号
- 返回:
- 引脚输入状态
圆弧运动 分类
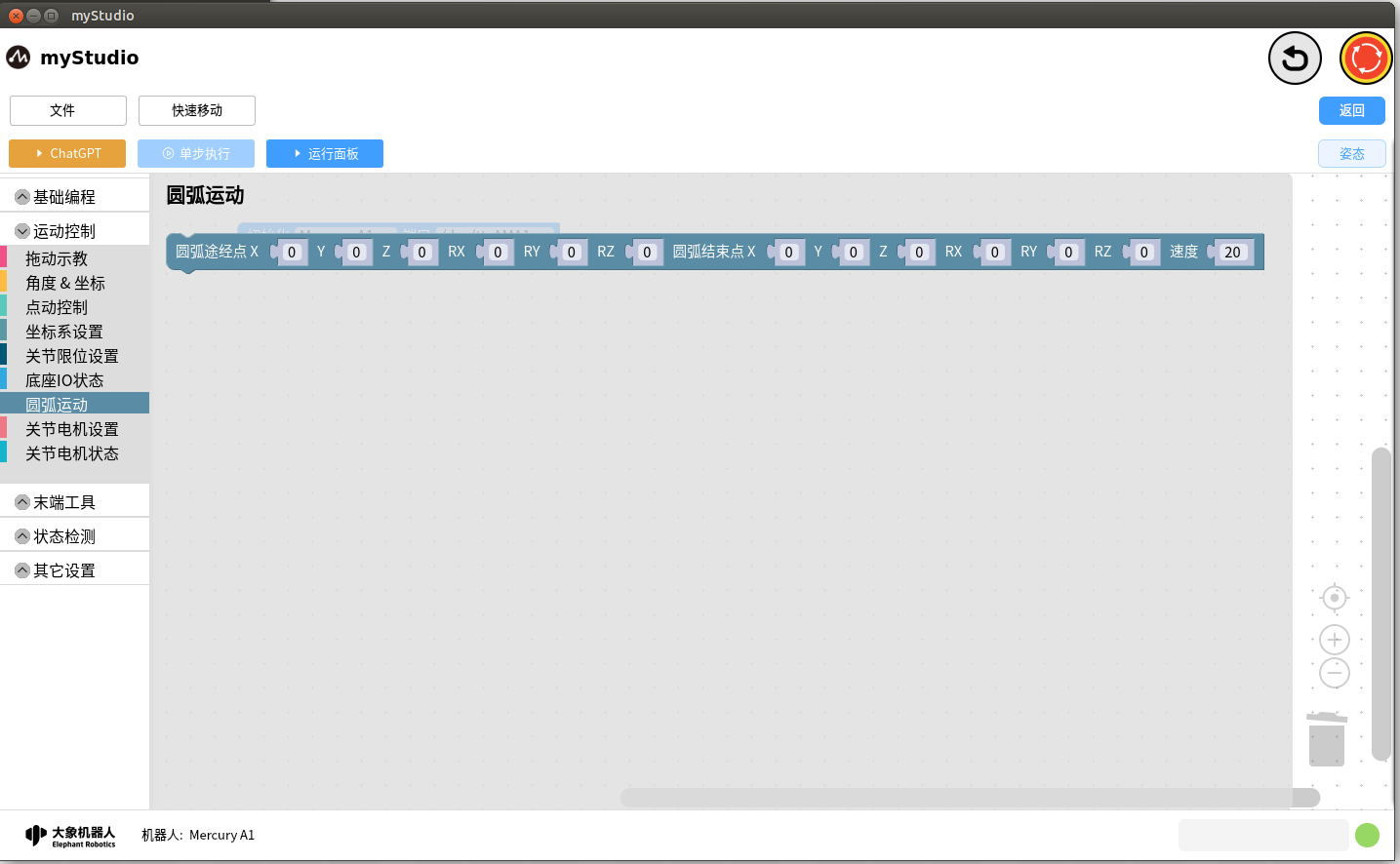
圆弧轨迹运动
python接口原型:
write_move_c(transpoint,endpoint,speed)接口说明:圆弧轨迹运动
参数:
transpoint:圆弧途径点(list):[x,y,z,rx,ry,rz]endpoint:圆弧结束点(list):[x,y,z,rx,ry,rz]
关节电机设置 分类
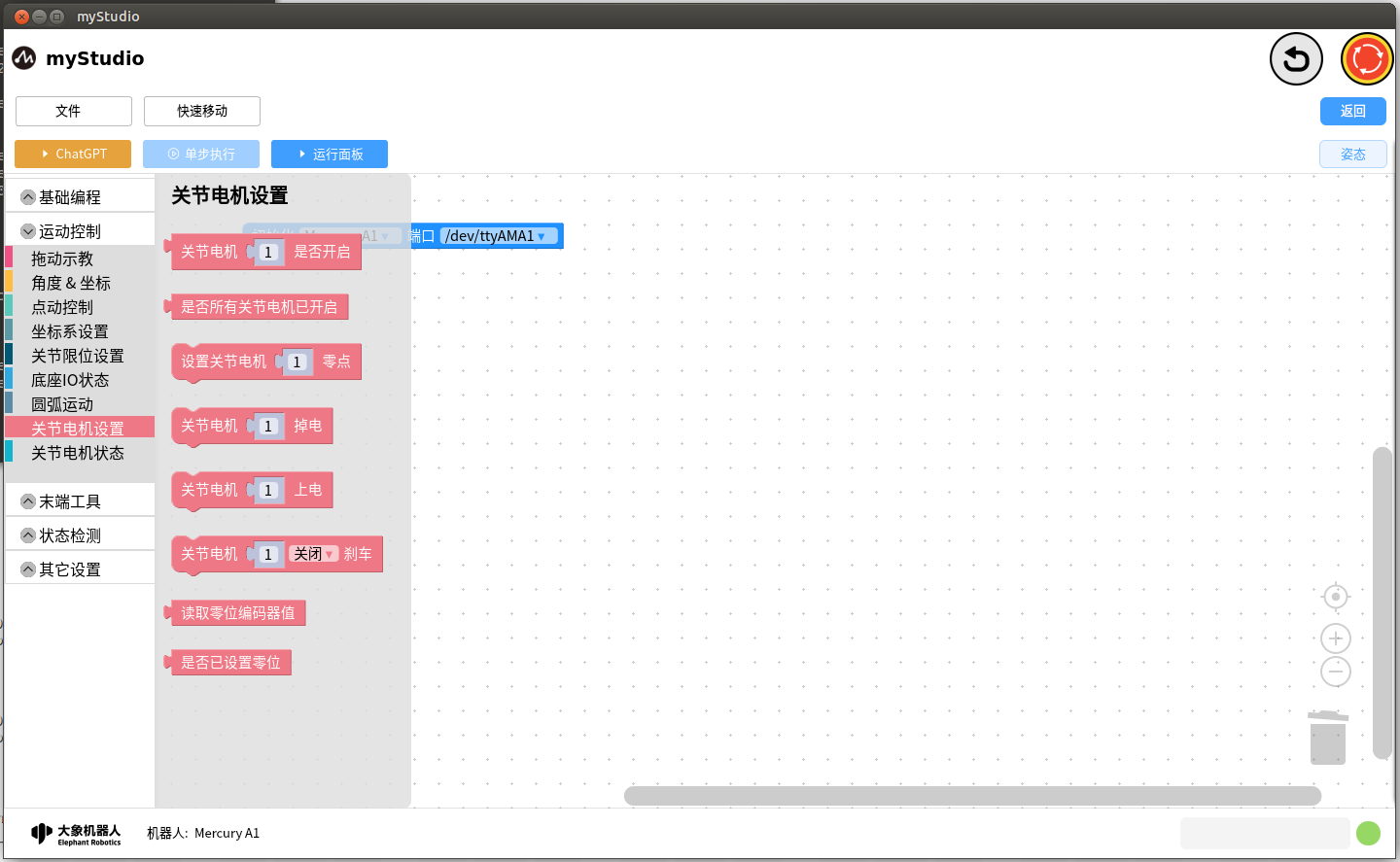
关节电机是否开启
python接口原型:
is_servo_enable(servo_id)接口说明:判断舵机是否已开启
参数:
servo_id(int) 1 ~ 7返回:
0:未开启1:已启用-1: 错误
是否所有关节已开启
python接口原型:
is_all_servo_enable()接口说明:判断所有舵机是否已开启
返回:
0:非都已开启1:都已启用-1:错误
设置关节电机零点
- python接口原型:
set_servo_calibration(servo_no) 接口说明:校准关节执行器以当前位置为角度零点。
参数:
servo_no:舵机序号,1 - 7。
关节电机掉电
- python接口原型:
release_servo(servo_id) - 接口说明:指定关节电机断电
- 参数:
servo_id:1 ~ 7
关节电机上电
- python接口原型:
focus_servo(servo_id) - 接口说明:指定关节电机上电
- 参数:
servo_id:1 ~ 7
关节电机打开/关闭刹车
- python接口原型:
joint_brake(servo_id,status) - 接口说明:设置指定关节电机刹车状态
- 参数:
servo_id:关节电机 1 ~ 7status:打开/关闭
读取零位编码器值
- python接口原型:
get_zero_pos - 接口说明:读取零位编码器值
- 返回:
- 零位编码器值
是否已设置零位
- python接口原型:
is_init_calibrated - 接口说明:判断是否已设置零位
- 返回:
True:已设置零位False:未设置零位
关节电机状态 分类
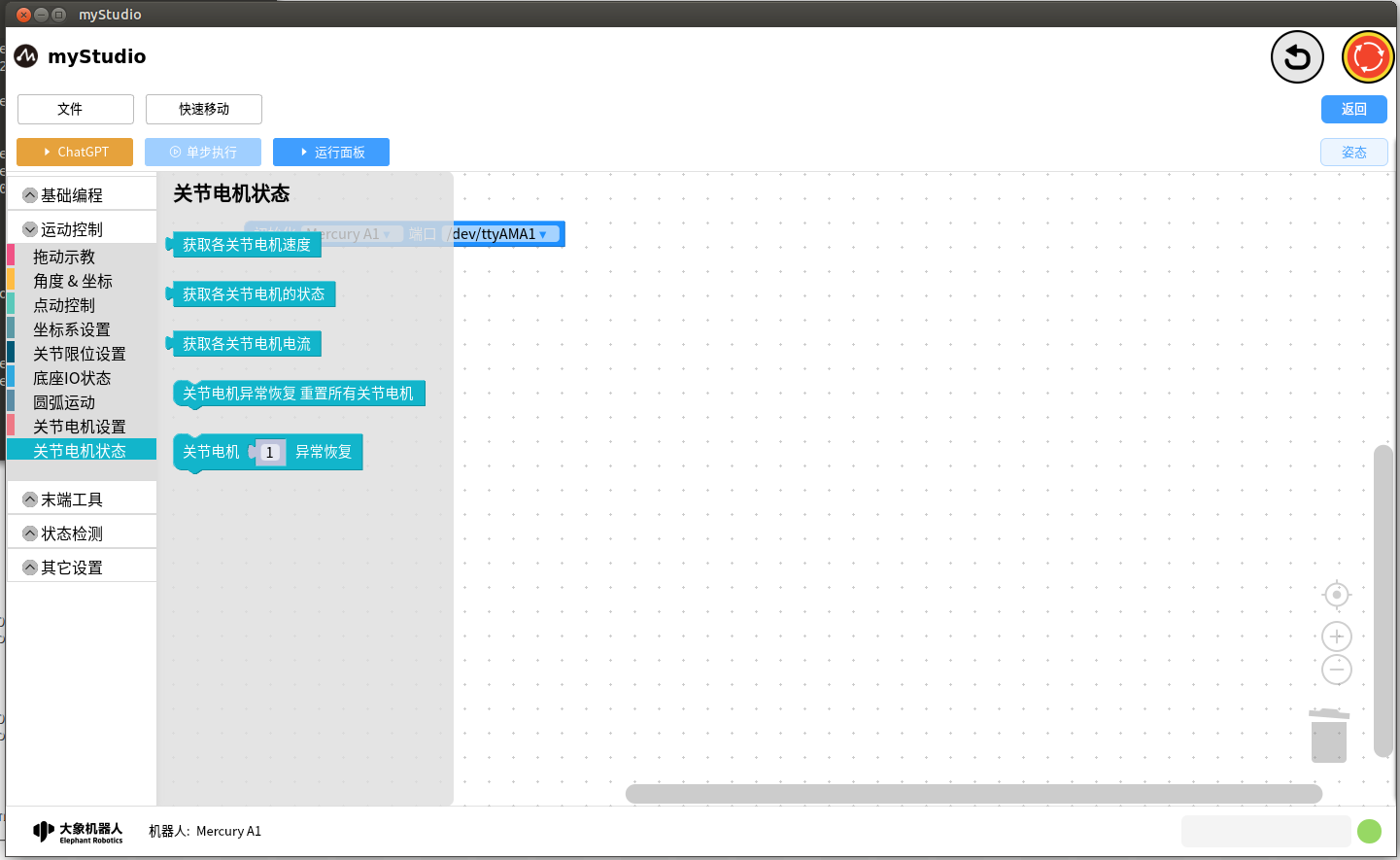
获取各关节电机速度
- python接口原型:
get_servo_speeds() - 接口说明:获取各关节电机速度
- 返回:
- 各关节电机速度
获取各关节电机的状态
- python接口原型:
get_servo_status() - 接口说明:获取各关节电机的状态
- 返回:
- 各关节电机状态
获取各关节电机电流
- python接口原型:
get_servo_currents() - 接口说明:获取各关节电机电流
- 返回:
- 各关节电机电流
关节电机异常恢复 重置所有关节电机
- python接口原型:
servo_restore(254) - 接口说明:关节异常恢复 重置所有关节电机
关节电机异常恢复
- python接口原型:
servo_restore(joint_id) - 接口说明:关节电机异常恢复
- 参数:
joint_id:关节id:1-7
末端工具
夹爪控制 分类
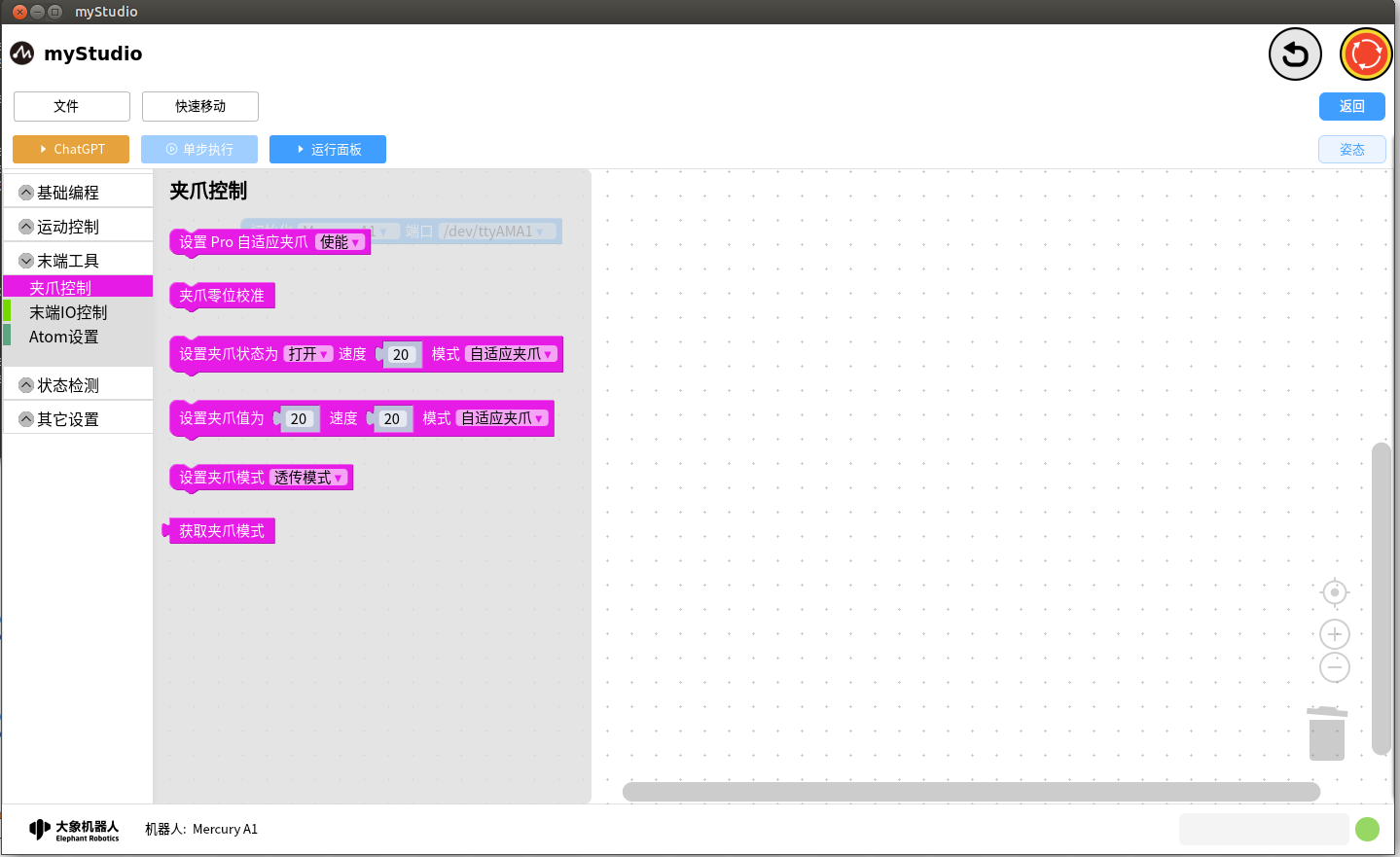
设置 Pro 自适应夹爪
- python接口原型:
set_gripper_enabled(flag) - 接口说明:设置 Pro 自适应夹爪
- 参数:
flag:使能 / 释放
夹爪零位校准
python接口原型:
set_gripper_calibration()接口说明:将当前位置设置为零,设置当前位置值为
2048。
设置夹爪状态
python接口原型:
set_gripper_state(flag, speed, mode)接口说明:设置夹爪开关状态
参数
flag:状态:打开 /关闭speed:速度: 0 ~ 100mode:夹爪类型
设置夹爪值
python接口原型:
set_gripper_value(值,速度,模式)接口说明:设置夹爪值
参数
value:值:0 ~ 100speed:速度:0 ~ 100mode:夹爪类型
设置夹爪模式
- python接口原型:
set_gripper_mode(status) - 接口说明:设置夹爪模式。
- 参数:
status:透传模式 / 端口模式。
获取夹爪模式
python接口原型:
get_gripper_mode()接口说明:获取夹爪模式
返回:
0:透传模式1:端口模式
末端 IO 控制 分类
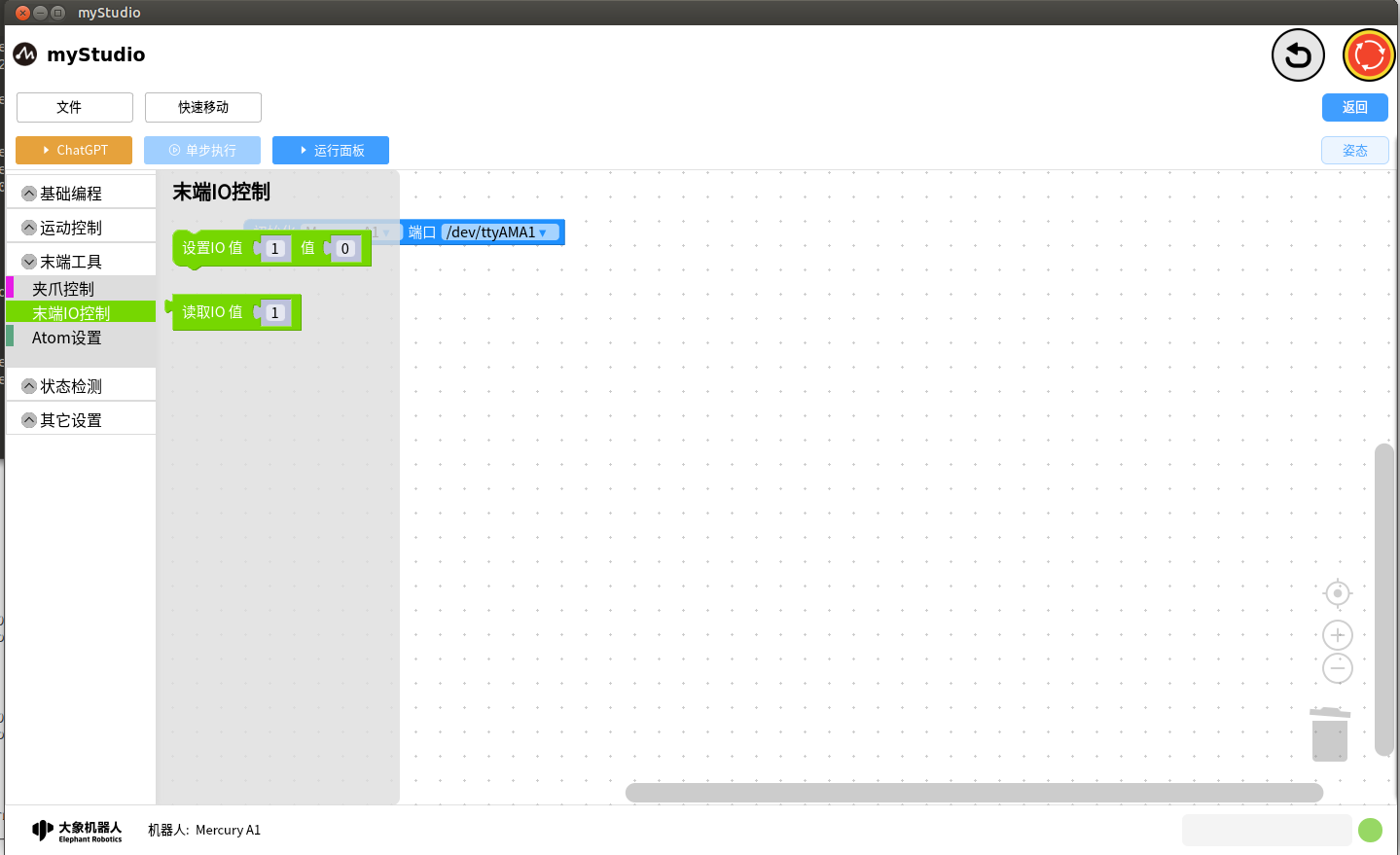
设置IO值
- python接口原型:
set_digital_output(id,state) - 接口说明:设置IO值
参数
id:io序列号state:选择状态0或1
读取IO值
- python接口原型:
get_digital_input(id) - 接口说明:读取IO值
- 参数
id:io序列号
Atom 设置

设置颜色
- python接口原型:
set_color(red=0,green=0,blue=0) - 接口说明:设置末端LED灯的颜色
- 参数:
red:红色值 0 - 255green:绿色值 0 -255blue:蓝色值 (0- 255)
状态检测
设备运行状态
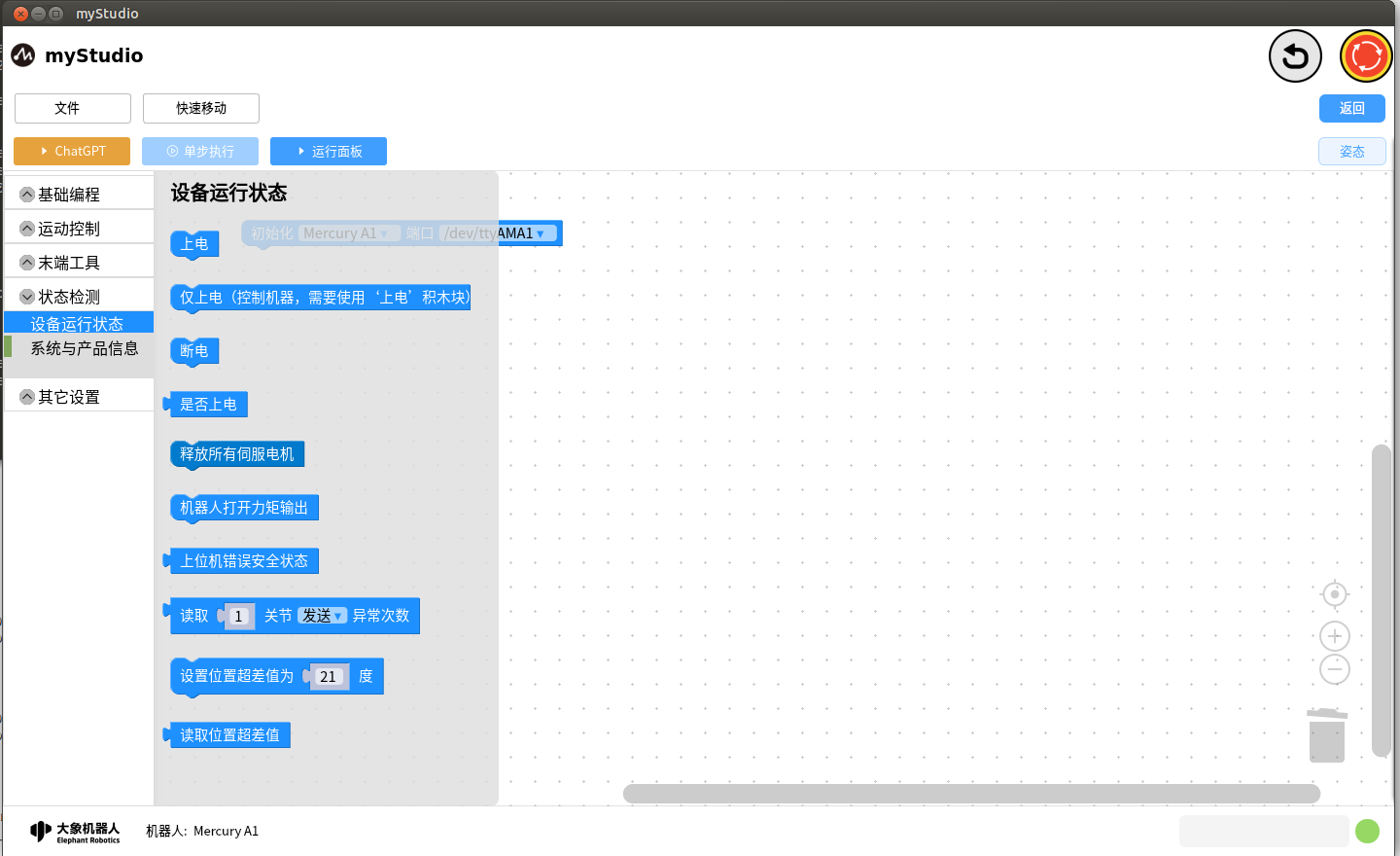
上电
- python接口原型:
power_on() - 接口说明:机器上电,可以控制机器
仅上电
- python接口原型:
power_on_only() - 接口说明:机器上电,机器不可控
断电
- python接口原型:
power_off() - 接口说明:机器断电
是否上电
- python接口原型:
is_power_on() 接口说明:检查机械臂是否已上电
返回:
1: 开机0:关闭电源-1: 错误
释放所有舵机
python接口原型:
release_all_servos()接口说明:设置机械臂为自由运动模式
机器人打开力矩输出
- python接口原型:
focus_all_servos() - 接口说明:设置机械臂打开力矩输出
上位机错误安全状态
python接口原型:
get_robot_status()接口说明:获取上位机错误安全状态
返回:
- 状态信息
读取关节异常次数
- python接口原型:
get_comm_error_counts(joint_id,type) - 接口说明:获取关节异常次数
- 参数:
joint_id:关节id:1-7type:异常类型
- 返回:
- 异常次数
设置位置超差值
python接口原型:
set_pos_over_shoot(value)接口说明:设置位置超差值
参数:
value:超差值
读取位置超差值
- python接口原型:
get_pos_over_shoot - 接口说明:读取位置超差值
- 返回:
- 位置超差值
系统与产品信息
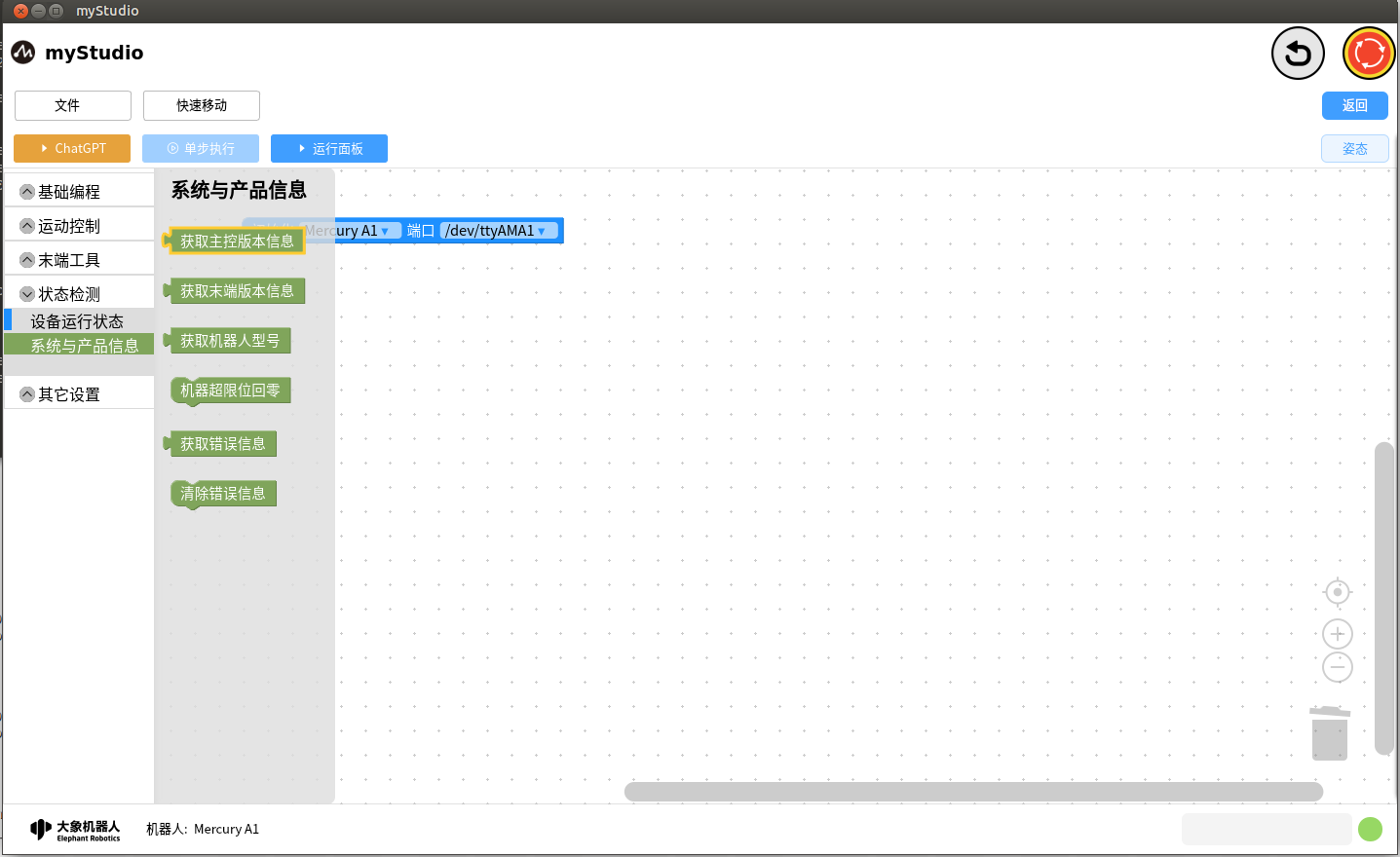
获取主控信息
- python接口原型:
get_system_version() - 接口说明:获取主控版本信息
- 返回:
- 返回主控版本信息
获取末端固件版本
- python接口原型:
get_atom_version() - 接口说明:获取末端固件版本
- 返回:
- 返回末端固件版本
获取机器人型号
- python接口原型:
get_robot_type() - 接口说明:获取机器人型号
- 返回:
- 获取机器人型号
机器超限位回零
- python接口原型:
over_limit_return_zero - 接口说明:机器超限位回零
获取错误信息
- python接口原型:
get_error_information() - 接口说明:获取错误信息
- 返回:
- 获取错误信息
清除错误信息
- python接口原型:
clear_error_information() - 接口说明:清除错误信息
其它设置
零空间偏转角
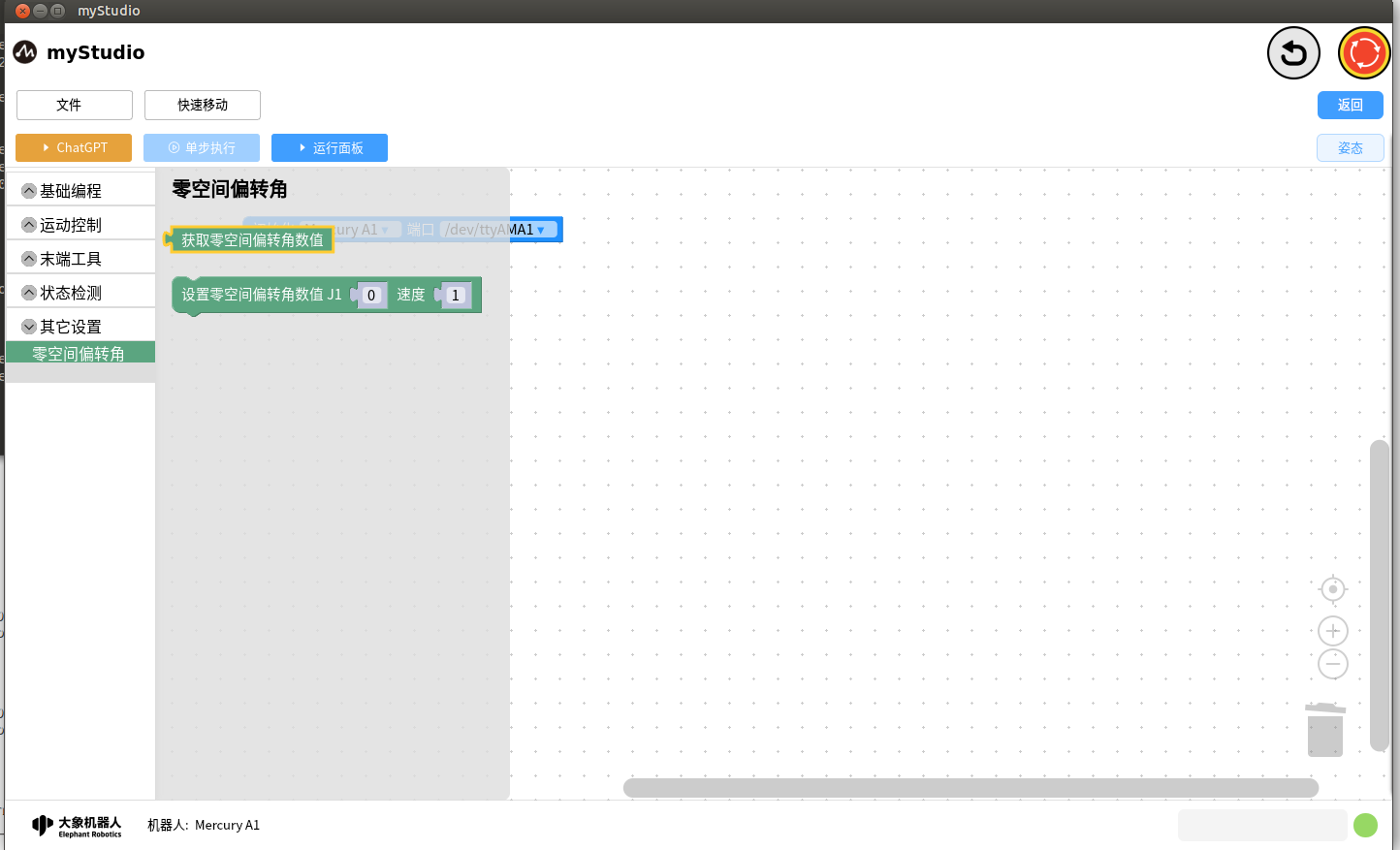
获取零空间偏转角数值
- python接口原型:
get_solution_angles() - 接口说明:获取零空间偏转角数值
- 返回值:
J1_angle_low:-90 ~ +90J1_angle_high:-90 ~ +90
设置零空间偏转角数值
- python接口原型:
set_solution_angles(J1_angle,speed) - 接口说明:获取零空间偏转角数值
- 参数:
J1_angle:-90 ~ +90speed:1-100