Mercury A1_Gitbook
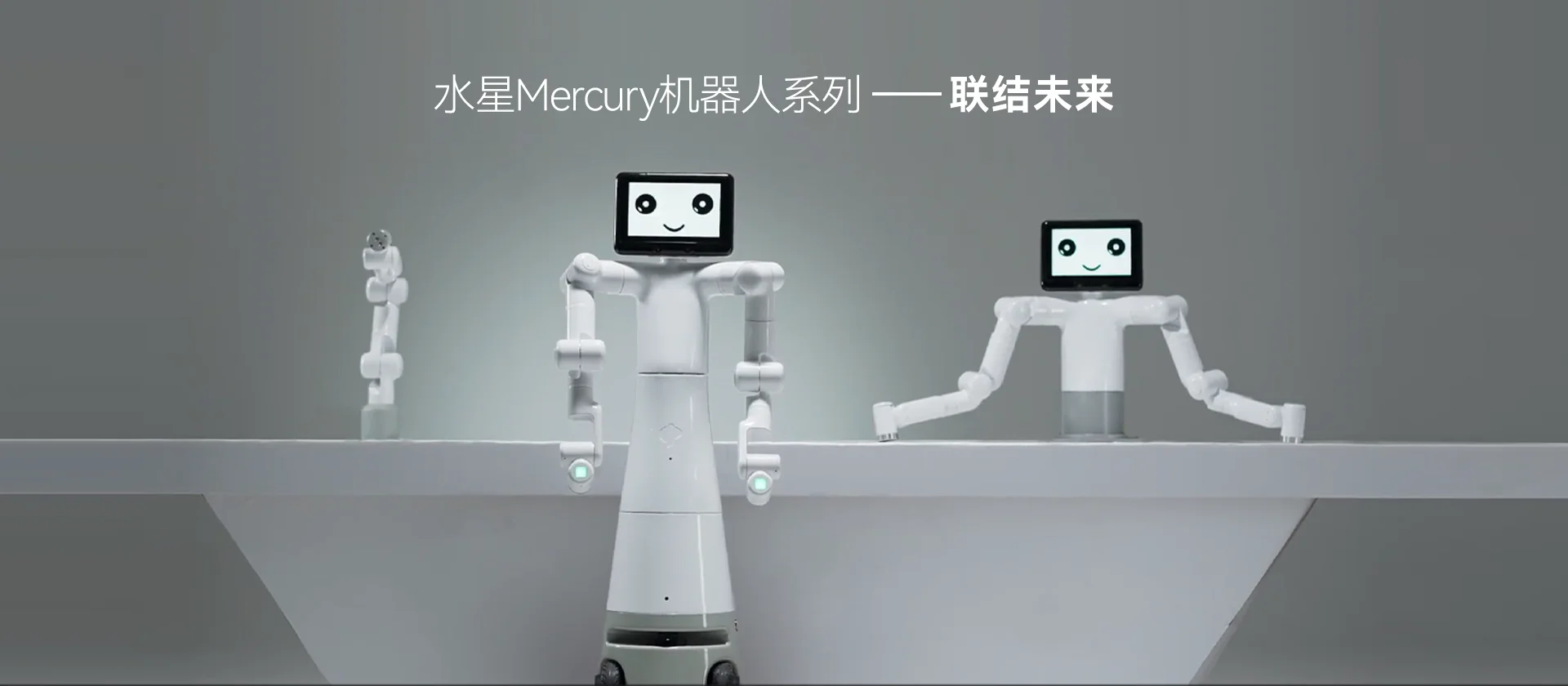
欢迎来到Elephant Robotics水星系列的世界——这里,创新与实用性交织,为具身智能和人形机器人研究提供了一个前所未有的通用硬件平台。我们自豪地呈现三个独特的产品型号,每个都以其卓越的特性,满足您在机器人研究和教育领域的多样化需求。
水星X1轮式人形机器人:整机共19自由度,它结合了高性能移动底座与先进的双臂协同和感知能力,搭载英伟达Jetson边缘计算核心,和3D机器视觉,为机器人学和具身智能研究和开发提供了强大算力和硬件基础。

水星Mercury X1轮式人形机器人
水星B1半人形机器人:拥有17个自由度和双七轴机械臂,搭载英伟达Jetson边缘计算核心,3D机器视觉,和语音交互能力,是人机交互研究和双臂协同控制研究的首选。
水星Mercury B1半人形机器人
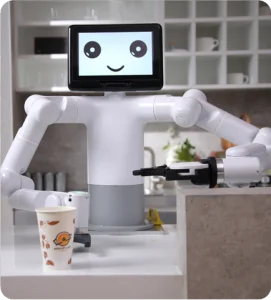
水星A1七轴机械臂:教育者的理想选择,这款7自由度的轻量级谐波关节机械臂,有效载荷1kg,可触摸的快速控制界面和应用软件极大简化了应用部署,无需复杂编程。

水星Mercury A1七轴机械臂
水星系列,不仅是机器人技术的集大成者,更是推动科学探索和教育创新的伙伴。