学习使用坐标控制
开始之前
1、确保机器已上电
2、确保机器连接正常
3、确保机器处于零位
本章介绍如何使用坐标来控制机械臂。
主要涉及到的API:
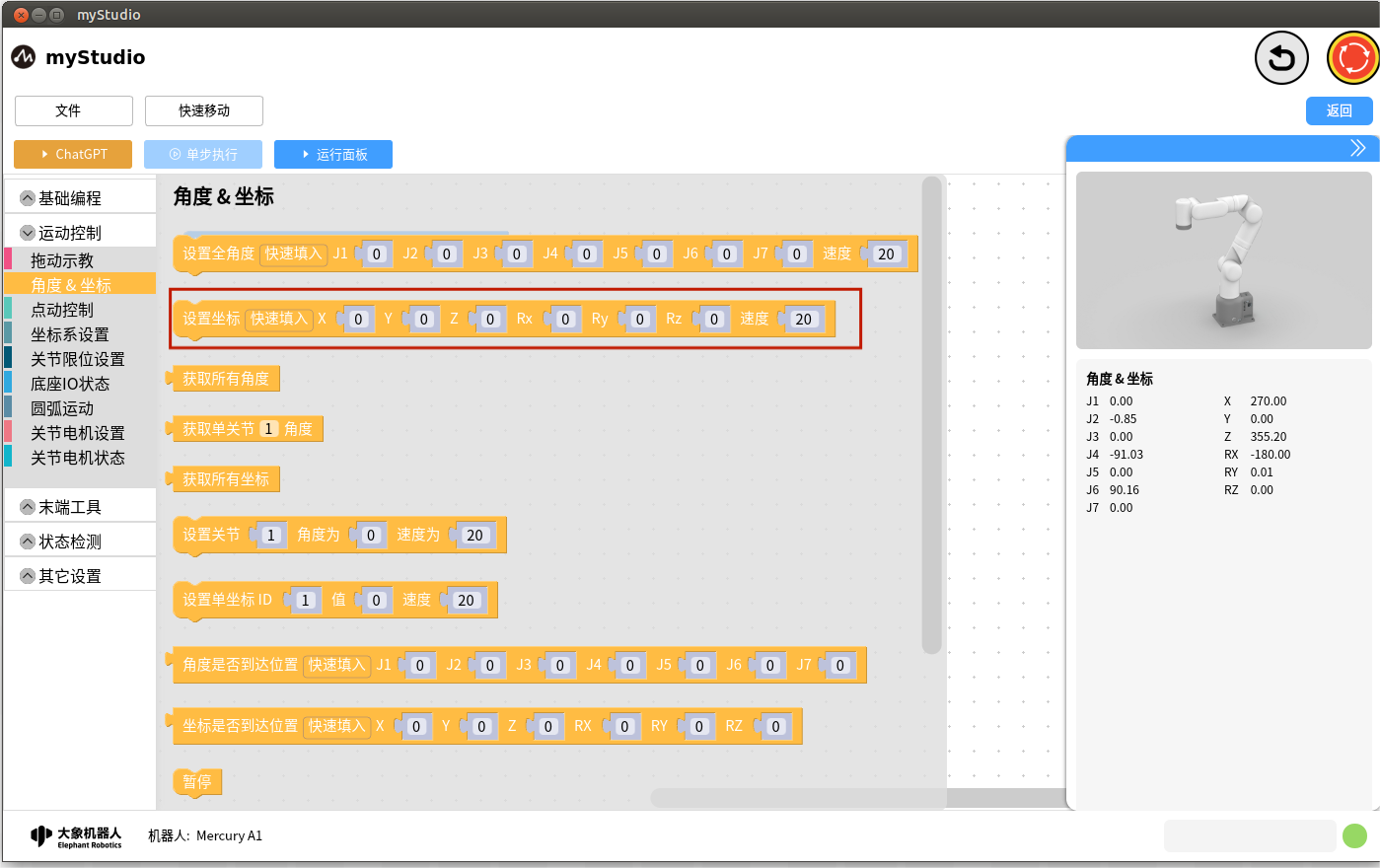
设置坐标
- 原型:
send_coords(values,speed) - 接口说明:设置机械臂多坐标
- 参数:
- values:[X,Y,Z,RX,RY,RZ]
- speed:速度,范围为 1-100
小案例
首次使用坐标移动前,需要执行的一些操作:
机械臂回到零位,可参考控制机械臂回零
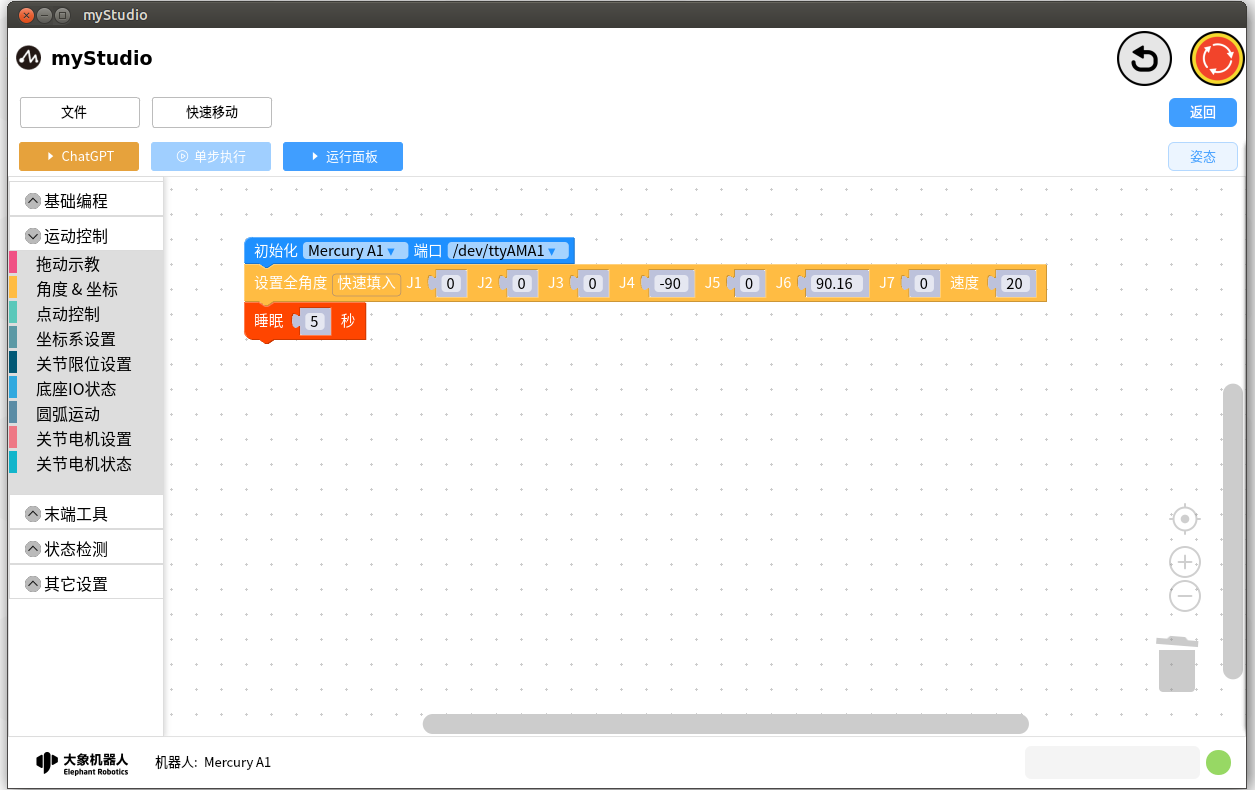
设置机械臂坐标运动的初始姿态(机器
J7需要与地面平行)如下图代码所示:
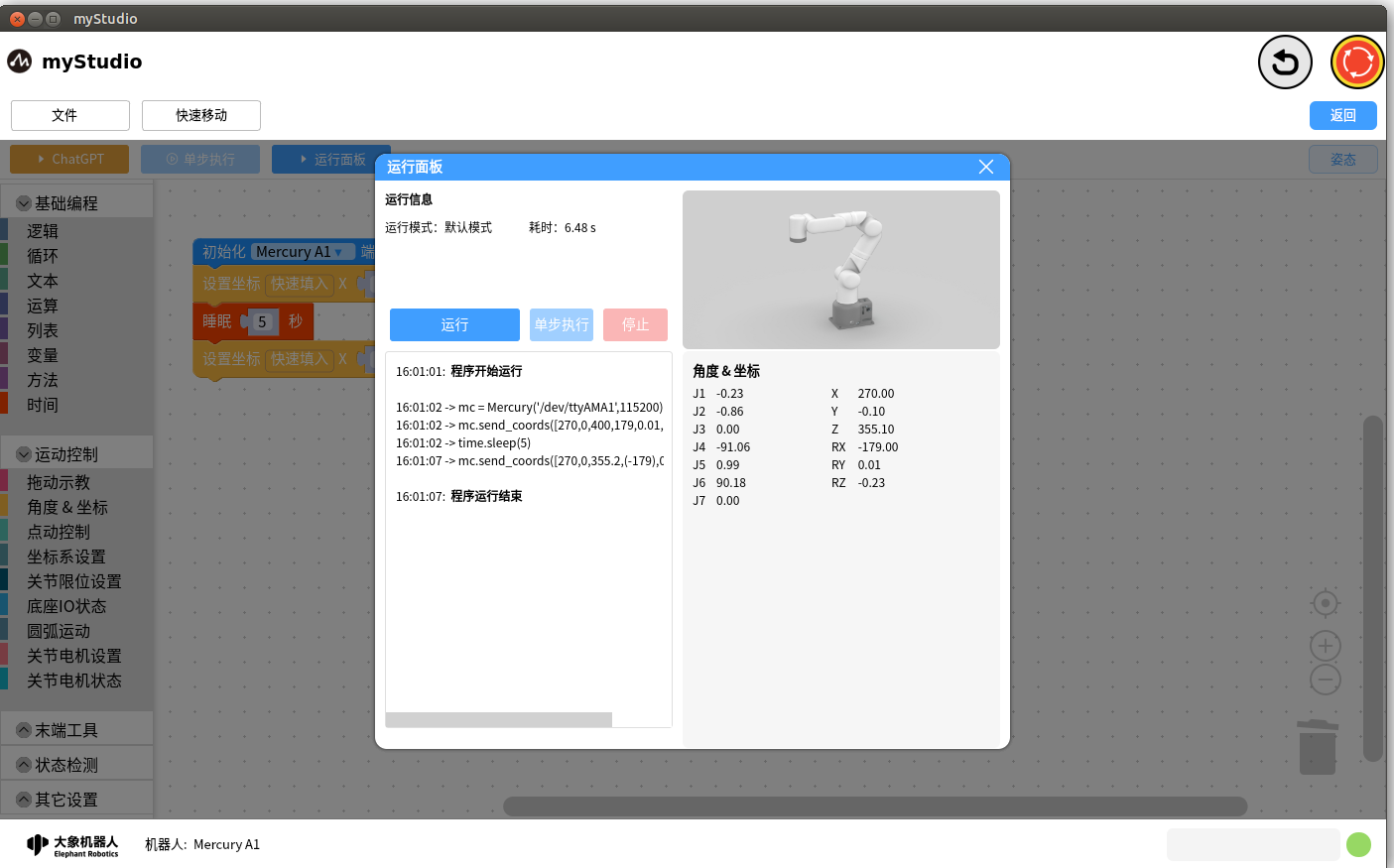
打开`运行面板`,运行代码。
坐标移动
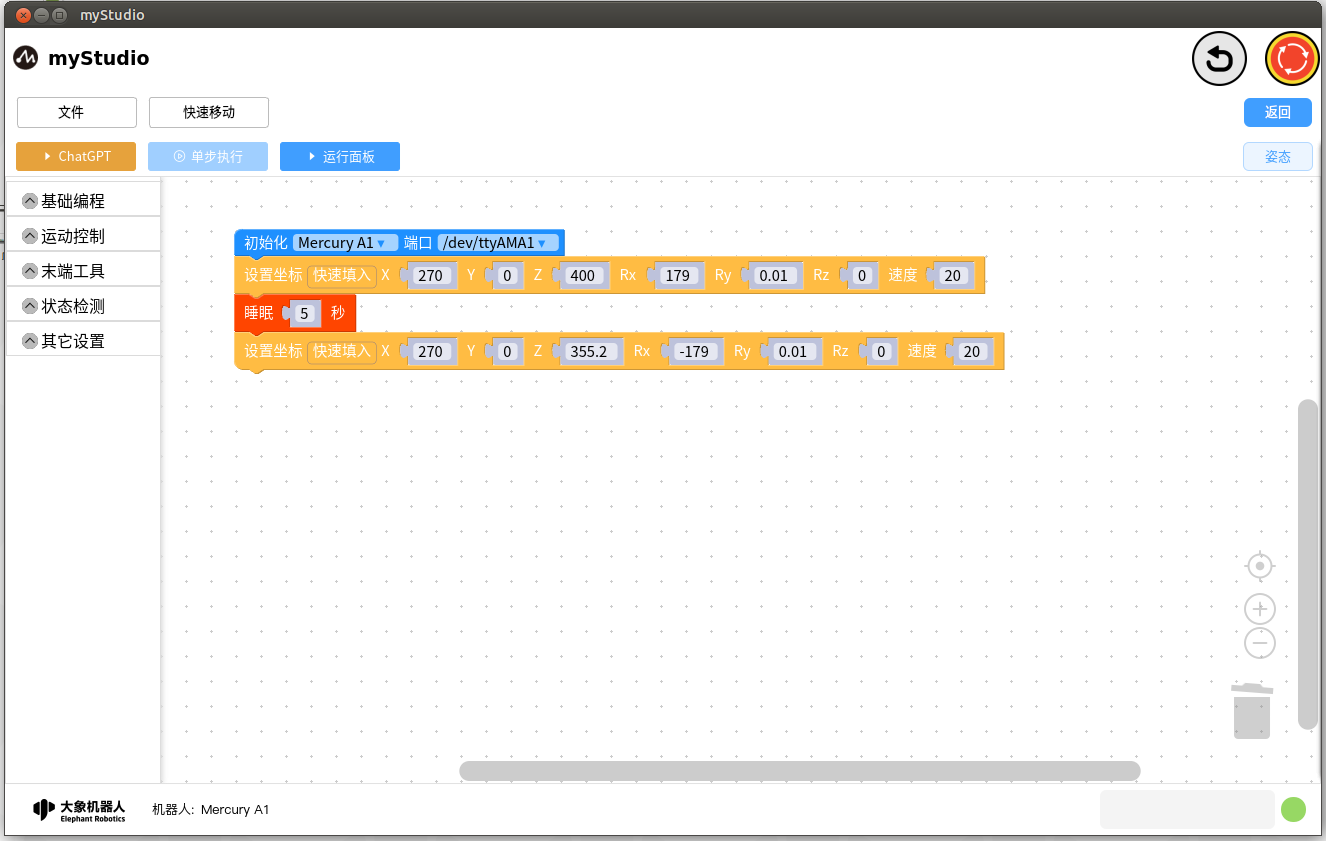
拖动一个设置坐标积木块到工作区,并点击积木块中的快速填入按钮填入数据,并将 Z 轴数据修改为 400

完整代码如下:
执行代码,整个过程观察到机械臂在上下移动