设置
1 界面介绍
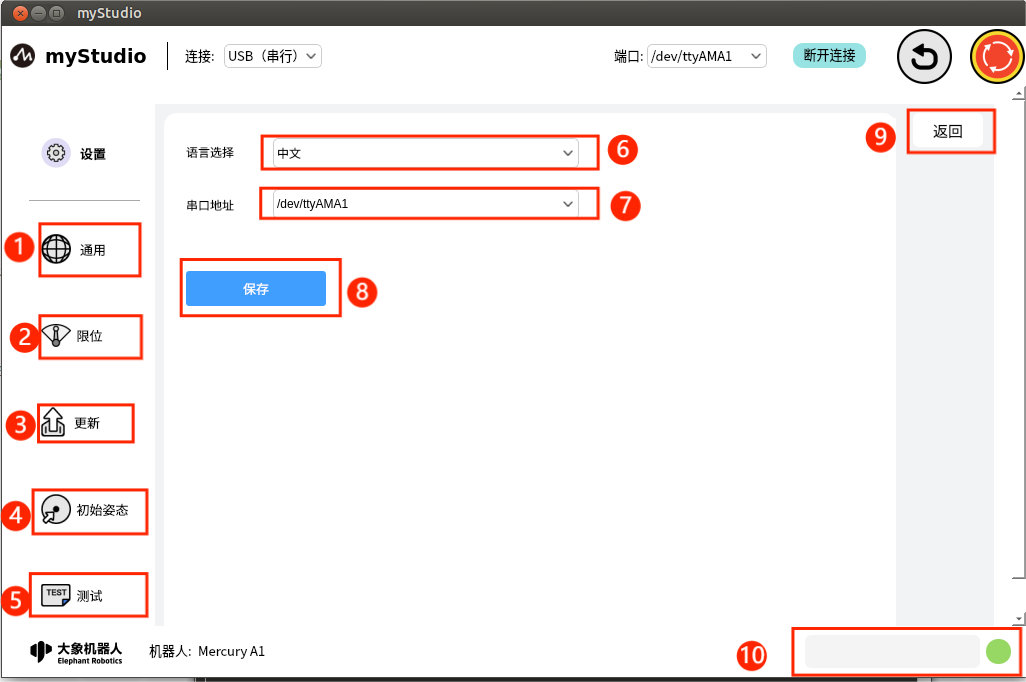
| 序号 | 功能介绍 |
|---|---|
| 1 | 通用设置模块,主要设置语言 |
| 2 | 限位设置模块 |
| 3 | 检查更新模块 |
| 4 | 初始姿态模块 |
| 5 | 测试模块 |
| 6 | 语言选择模块 |
| 7 | 串口地址模块,默认无需设置 |
| 8 | 设置保存按钮 |
| 9 | 退出设置 |
| 10 | 实时检测机器人状态的安全模块 |
2 通用设置
点击 通用 图标按钮,将进入语言设置页面,语言选择支持中文和英文。
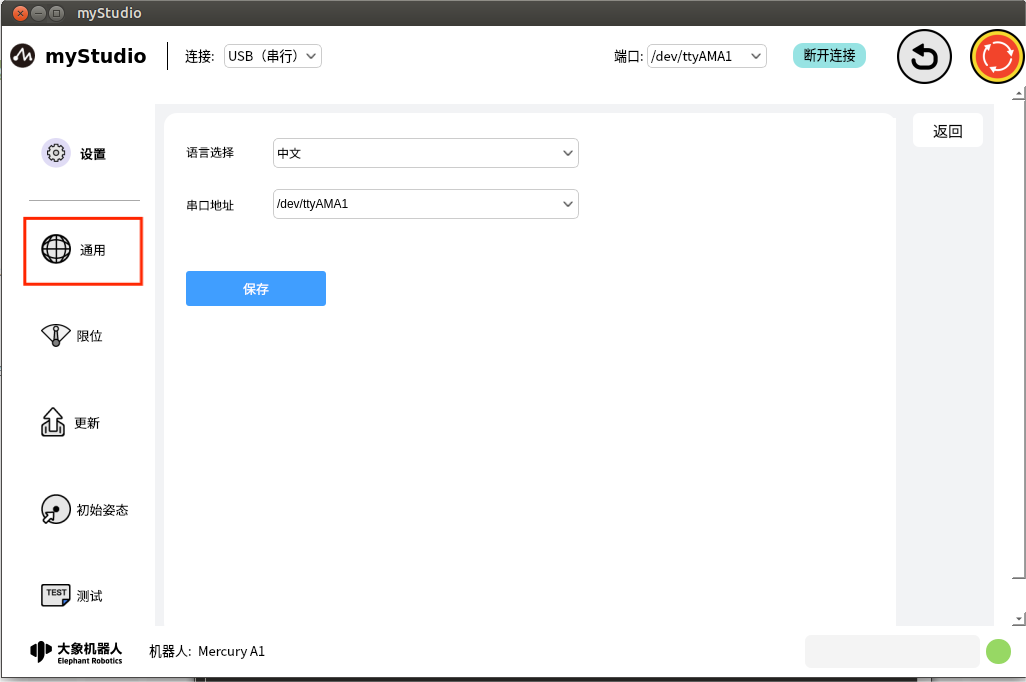
选择对应语言之后,点击 保存 按钮,即可成功设置语言。

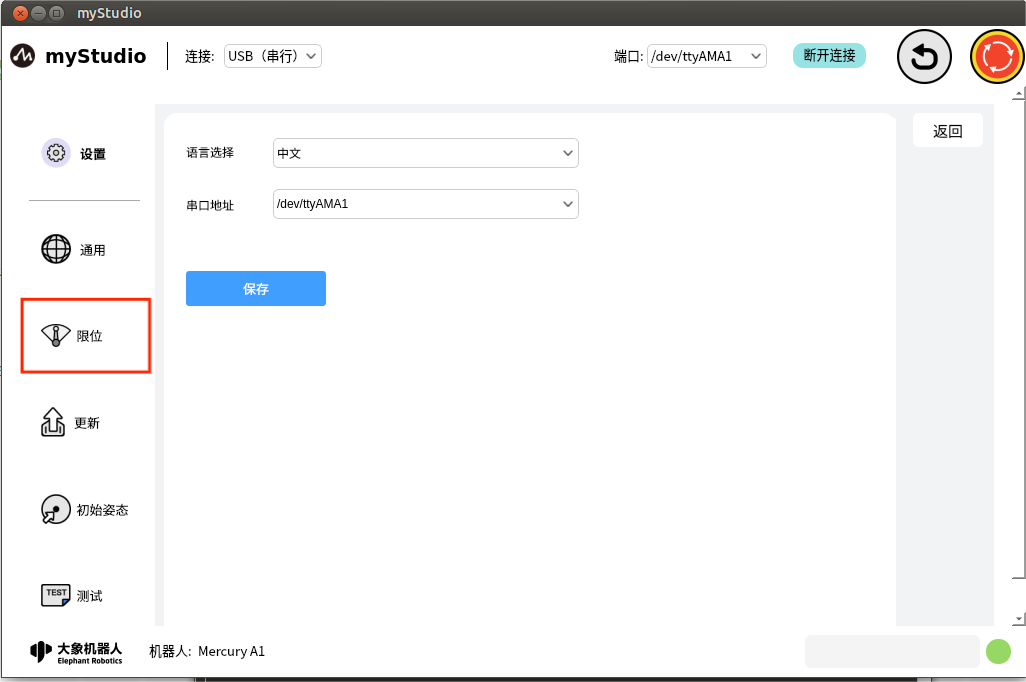
3 限位设置
注意:限位参数修改仅支持关节的最小角度和最大角度,其它参数均不支持修改。
点击 限位 图标按钮,将进入关节限位设置页面。
限位设置 界面默认显示当前机械臂的关节限位和坐标限位的相关参数。
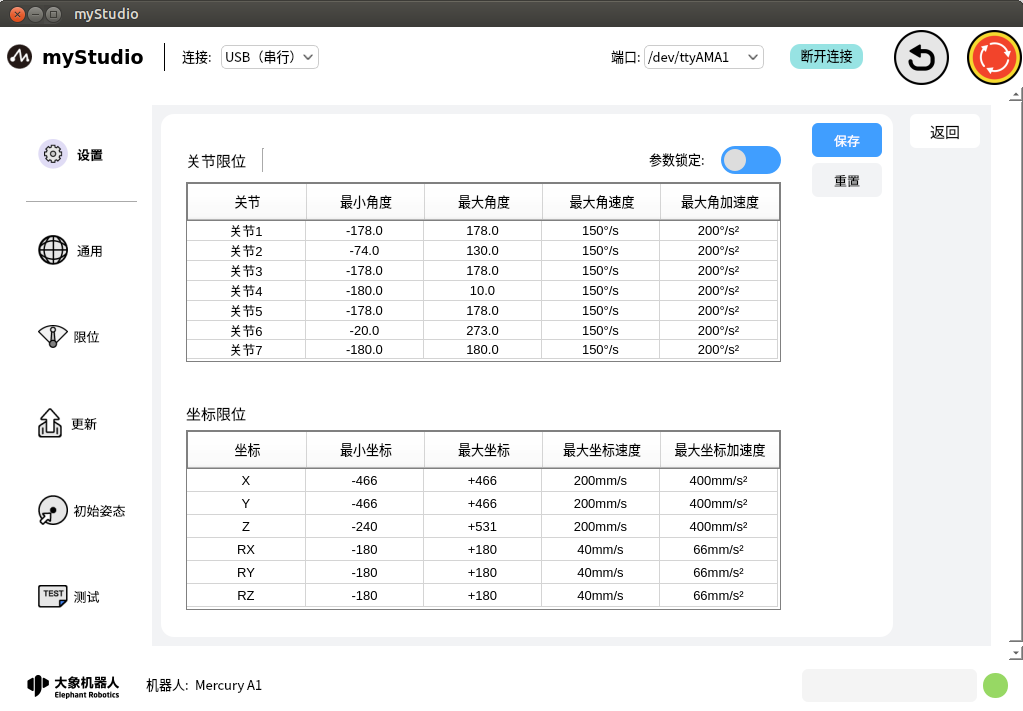
参数锁定 按钮默认处于锁定状态,按钮颜色为蓝色,代表不能修改限位参数。

当处于参数锁定状态时,点击 参数锁定 按钮,按钮颜色变成灰色,此时处于开锁状态,代表可以修改限位参数(仅能修改最小角度和最大角度的数值)。

点击 保存 按钮,即可将当前限位页面的参数保存到本地文件(json文件),并且设置机械臂的关节限位。

根据弹窗的提示选择文件保存路径。
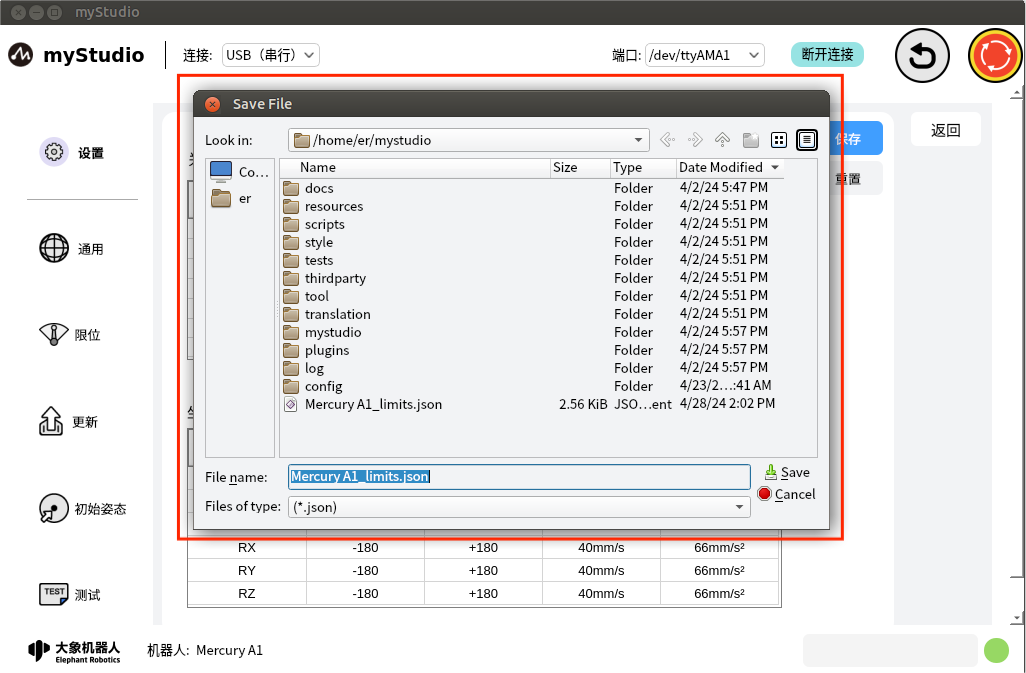
保存成功。

限位数据设置成功。

点击 重置 按钮,即可对机械臂设置默认限位参数。
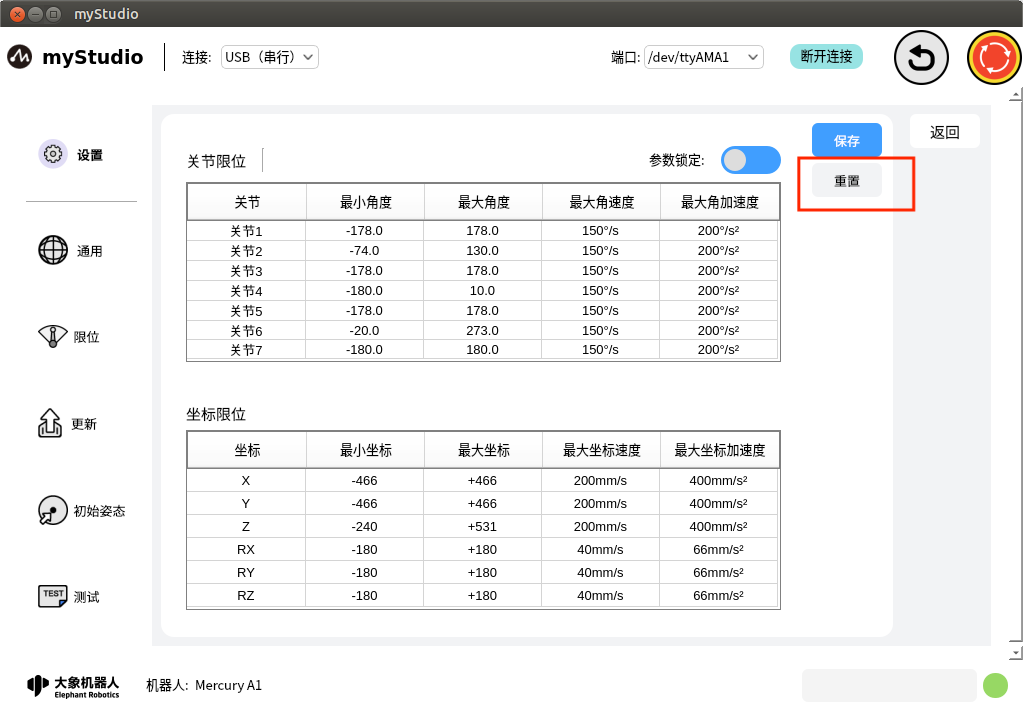
确认重置限位数据。

限位数据设置已成功重置。
4 检查更新
点击 更新 图标按钮,将进入检查更新状态页面。
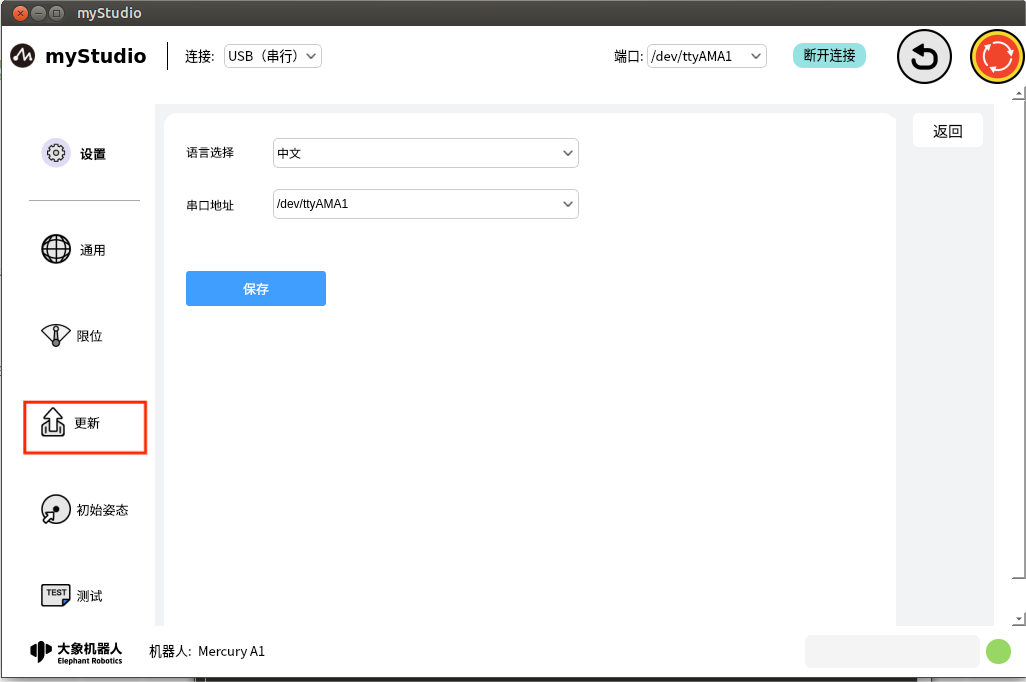
更新页面主要检查myStudio的版本以及机械臂的Pico固件版本状态。

如果检查到机械臂的Pico固件不是最新版本时,将会提示需要更新固件信息。

5 初始和打包姿态
点击 初始姿态 图标按钮,将进入初始姿态页面。
初始姿态页面:显示机械臂的初始姿态模型图、关节角度信息和坐标姿态信息。

点击 打包 按钮,将进入打包姿态页面。(仅对Mercury A1有效)

打包姿态页面:显示机械臂的打包姿态模型图、打包的关节角度信息。

点击 打包 按钮,机械臂将缓慢运动到打包姿态。

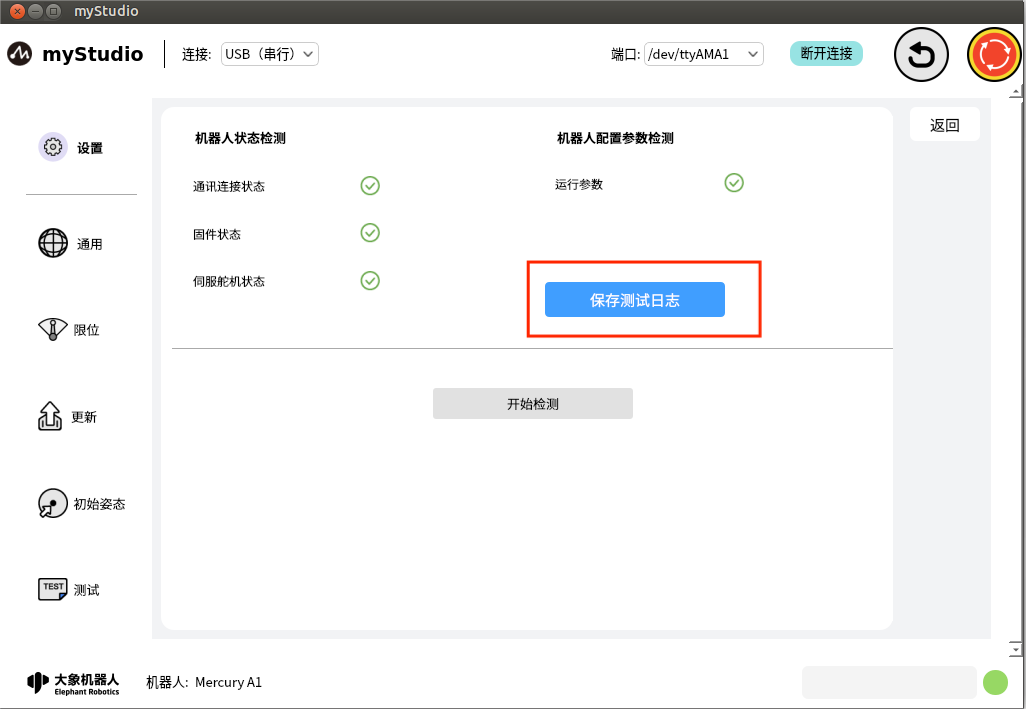
6 测试
点击 测试 图标按钮,将进入测试页面。
测试 页面:主要测试机械臂的通讯连接、固件、舵机、运行参数等状态。
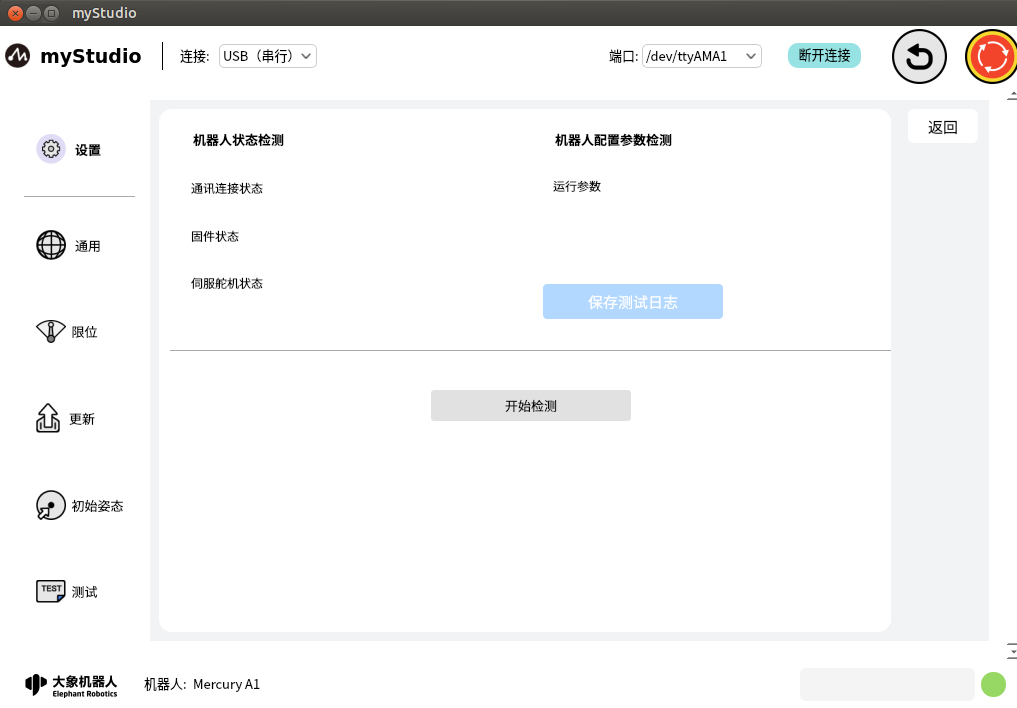
点击 开始检测 按钮,即可开始进行测试。

测试完成后,点击 保存测试日志 按钮,根据弹窗提示信息,即可将测试结果保存到本地日志文件。