Mercury Panel 使用指南
1 Mercury Panel简介
Mercury Panel是一款通过触摸机械臂底座的cm4对水星机械臂进行控制的应用。它的功能有坐标控制、角度控制、拖动示教等),便于操作人员与大象机器人进行交互。
适用设备:
-Mercury A1
使用之前请务必下载更新atom和basic固件
2 如何使用
我们已在系统安装好panel,桌面有快捷方式如图所示。

点击图标运行panel,桌面右上角有消息框弹出(若已开启,点击即关闭),

再次点击关闭panel,桌面右上角有消息框弹出。

运行panel时,用户能直观的看到可以点击的按钮以及对应的注释,开机默认为上电状态(上电状态末端rbg灯会亮)。界面左上角的灰色三角为返回上一界面,右上角的×为关闭界面,
2.1 拖动示教
点击主界面的拖动示教进入拖动示教界面。

进入拖动示教界面机械臂整体放松,移动到示教起点。
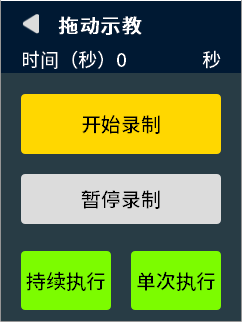
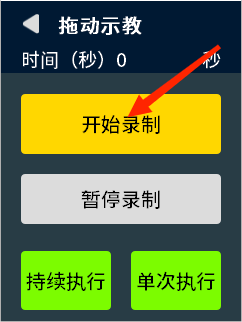
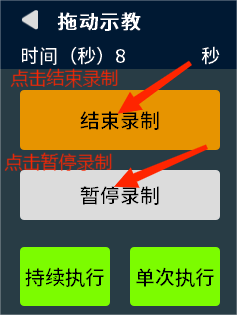
点击开始录制,录制时顶部会实时显示录制时长(录制时长不得超过60秒,否则有弹窗警告,需要退出拖动示教界面重新进入),拖动机械臂录制点位,点击结束录制,机械臂锁紧,录制完成。
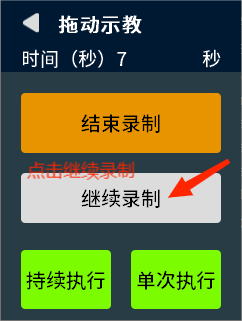
录制过程中点击暂停录制后机械臂整体锁紧,继续录制点位点击继续录制。
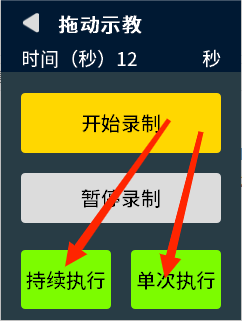
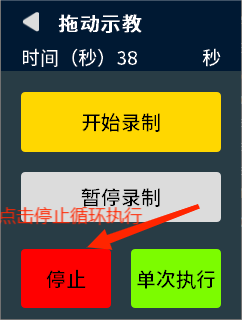
点击单次执行,播放一次录制完成的动作;点击持续执行,循环播放录制动作,点击停止,执行完当前动作后停止播放。
2.2 运动控制
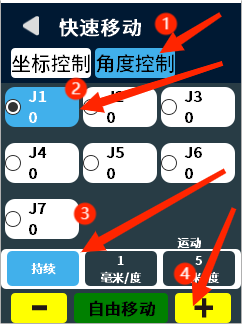
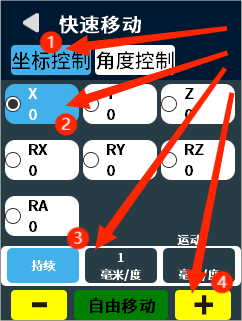
点击主界面的快速移动进入快速移动界面,进入快速移动界面选择角度控制或者坐标控制。

角度控制:选择要操作的关节,控制分为连续运动和步进运动。选择run下的持续,此时为连续运动,按下按钮后,直到释放按钮才会停止(达到限位后也会停止);选择run下的1毫米/度或者5毫米/度(步进值),此时为步进运动,点击+增加对应的步进值,点击-减少对应的步进值,步进运动到达点位就会停止(比如关节1现在角度30,增量值50,按下减号这边按钮,那么机械臂运动到-20就会停止)。
坐标控制:在使用坐标控制之前,需要将机械臂调整到合适的姿态(例如关节4:-90°)。选择要操作的坐标轴,控制分为连续运动和步进运动。选择run下的持续,此时为连续运动,按下按钮后,直到释放按钮才会停止(达到限位后也会停止);选择run下的1毫米/度或者5毫米/度(步进值),此时为步进运动,点击+增加对应的步进值,点击-减少对应的步进值,步进运动到达点位就会停止(比如X轴现在坐标30,增量值50,按下加号这边按钮,那么机械臂运动到80就会停止)。RA为冗余臂角。
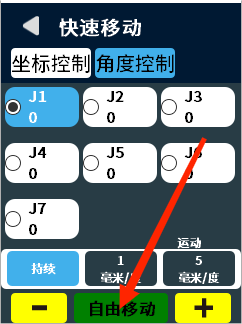
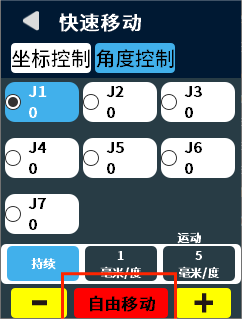
自由移动:按下自由移动按钮进入自由移动模式,atom的rgb灯变色,持续按下末端的rgb按钮机械臂整体放松,可对机械臂整体进行自由移动,松开末端的rgb按钮机械臂整体锁紧。再次点击自由移动退出自由移动模式。
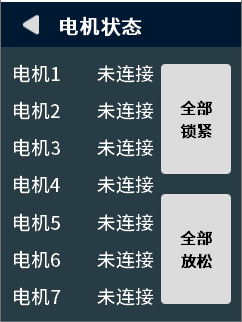
2.3 整机运行状态
点击主界面的电机状态进入电机状态界面,查看电机连接状态,通过全部锁紧和全部放松可以对机械臂整体进行放松和锁紧操作。

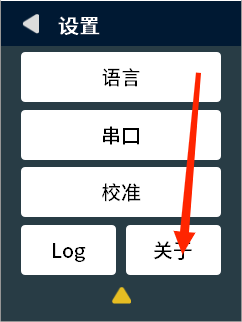
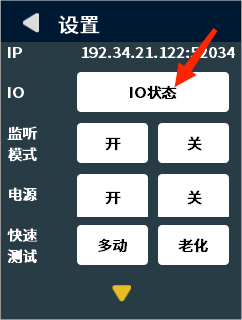
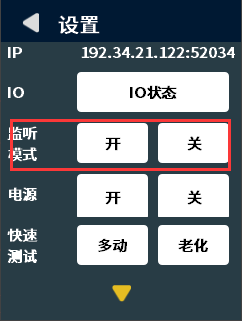
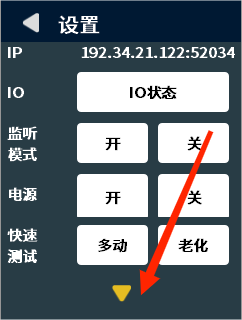
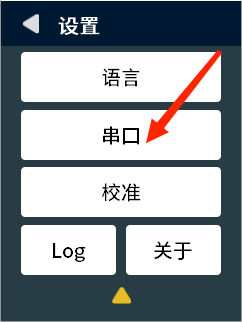
点击主界面的设置进入设置界面。

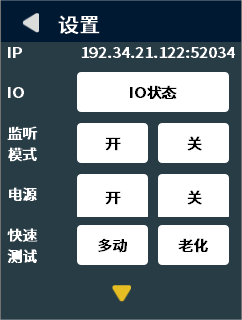
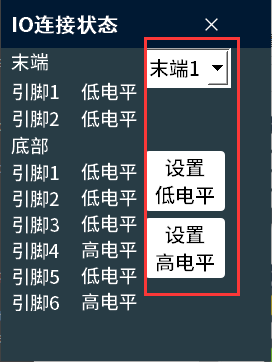
在此界面你可以点击IO状态查看atom和basic对应的IO状态。
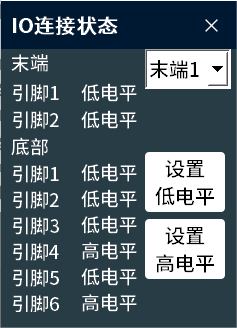
IO状态界面设置引脚高低电平暂未开发。
监听模式暂未开发。
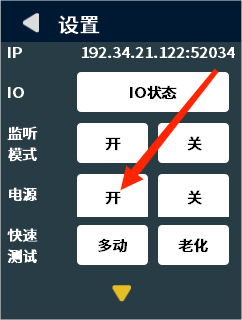
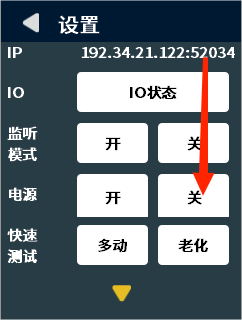
点击电源->开,上电,上电过程需等待7s;点击电源->关,掉电,掉电过程需等待3秒。
点击快速测试->多动,机械臂开始一轮多个点位的运动;点击快速测试->老化,机械臂开始循环一组大幅度点位的运动,再次点击老化,机械臂进行完当前这轮动作后停止。
点击黄色小三角,翻页。
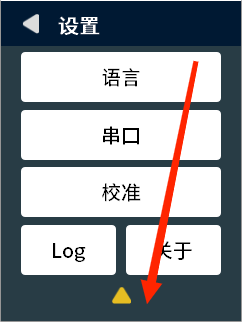
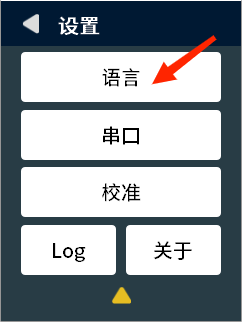
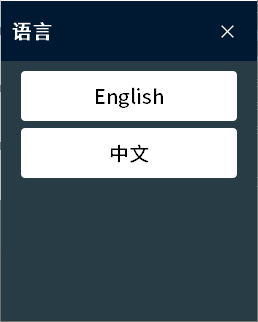
点击语言进入语言设置界面,可以选择应用程序的主题语言。
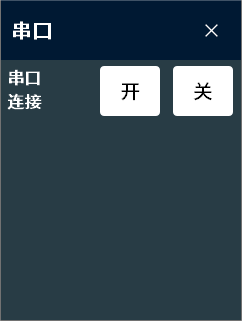
点击串口进入串口控制界面。点击串口连接->开,打开串口;串口连接->关,关闭串口。
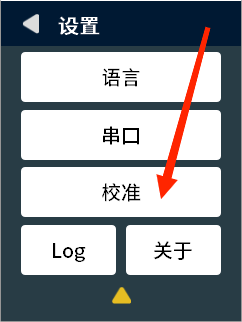
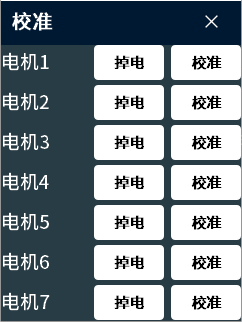
点击校准进入校准界面。可以对每个电机进行灵位校准:点击掉电放松机械臂对应关节,拖动对应关节到达新的零位,点击校准对应关节锁紧,校准完成。
Log界面暂未开发。
点击关于进入关于界面,查看应用版本。