夹爪的使用
开始之前
1、确保机器已上电
2、确保机器连接正常
本章介绍如何使用 blockly 控制连接到 Mercury A1 机械臂的自适应夹爪(如下图)

API display
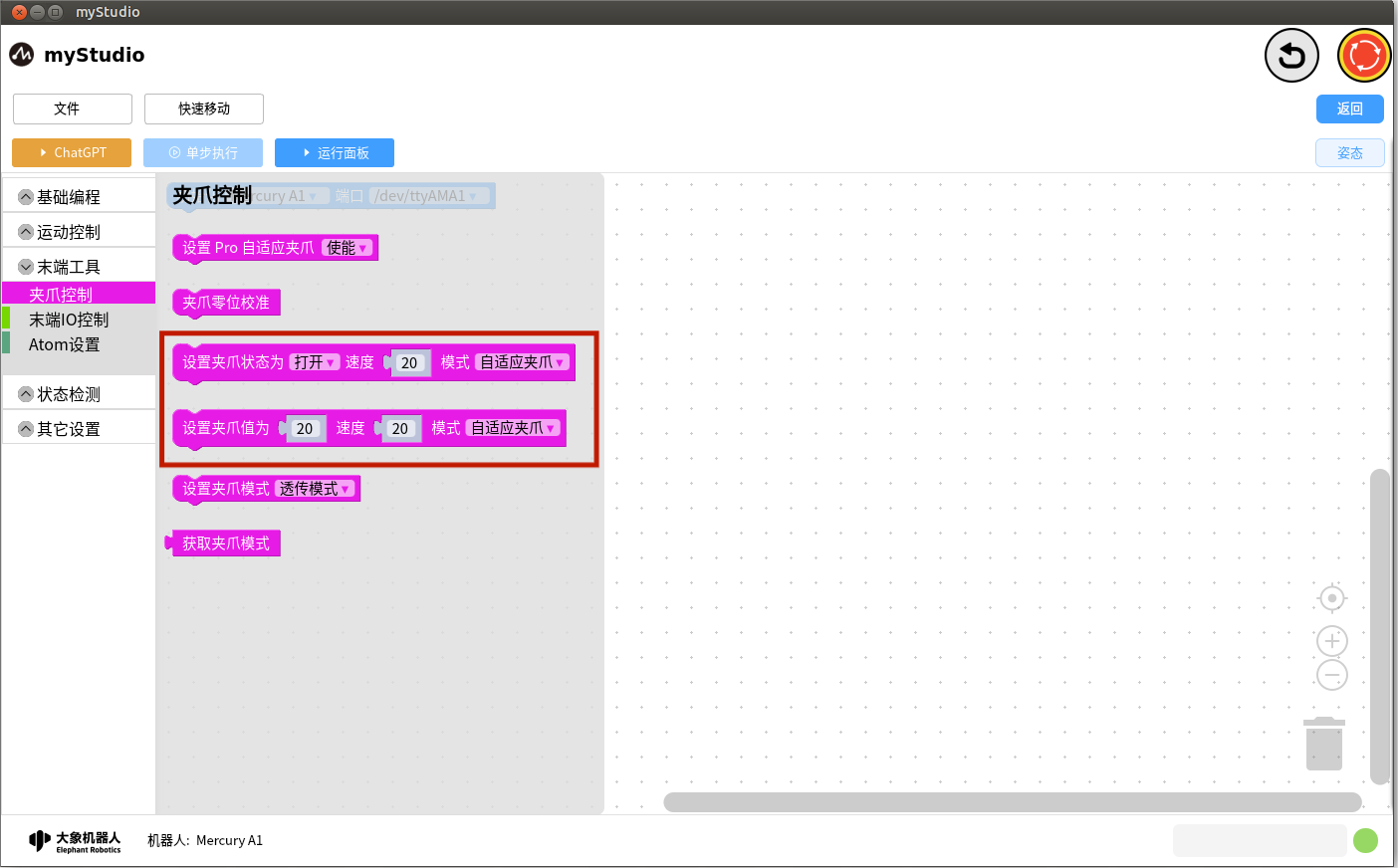
我们将用到以下积木块
1: 设置夹爪状态:使夹爪以指定的速度进入指定的状态(张开或闭合)
参数介绍:
该模块有两个可以调整的参数:
- 夹爪状态参数:闭合状态,打开状态
- 速度参数:表示旋转的速度,取值范围0~100
- 夹具类型参数:此处选择自适应夹爪
2: 设置夹爪值:使夹具以指定的速度到达指定的位置
参数介绍:
该模块有两个可以调整的参数:
- 夹爪值参数:表示夹爪要到达的位置,取值范围为 0~100。
- 速度参数:表示旋转的速度,取值范围0~100。
- 夹具类型参数:此处选择自适应夹爪
小案例
图形代码如下:
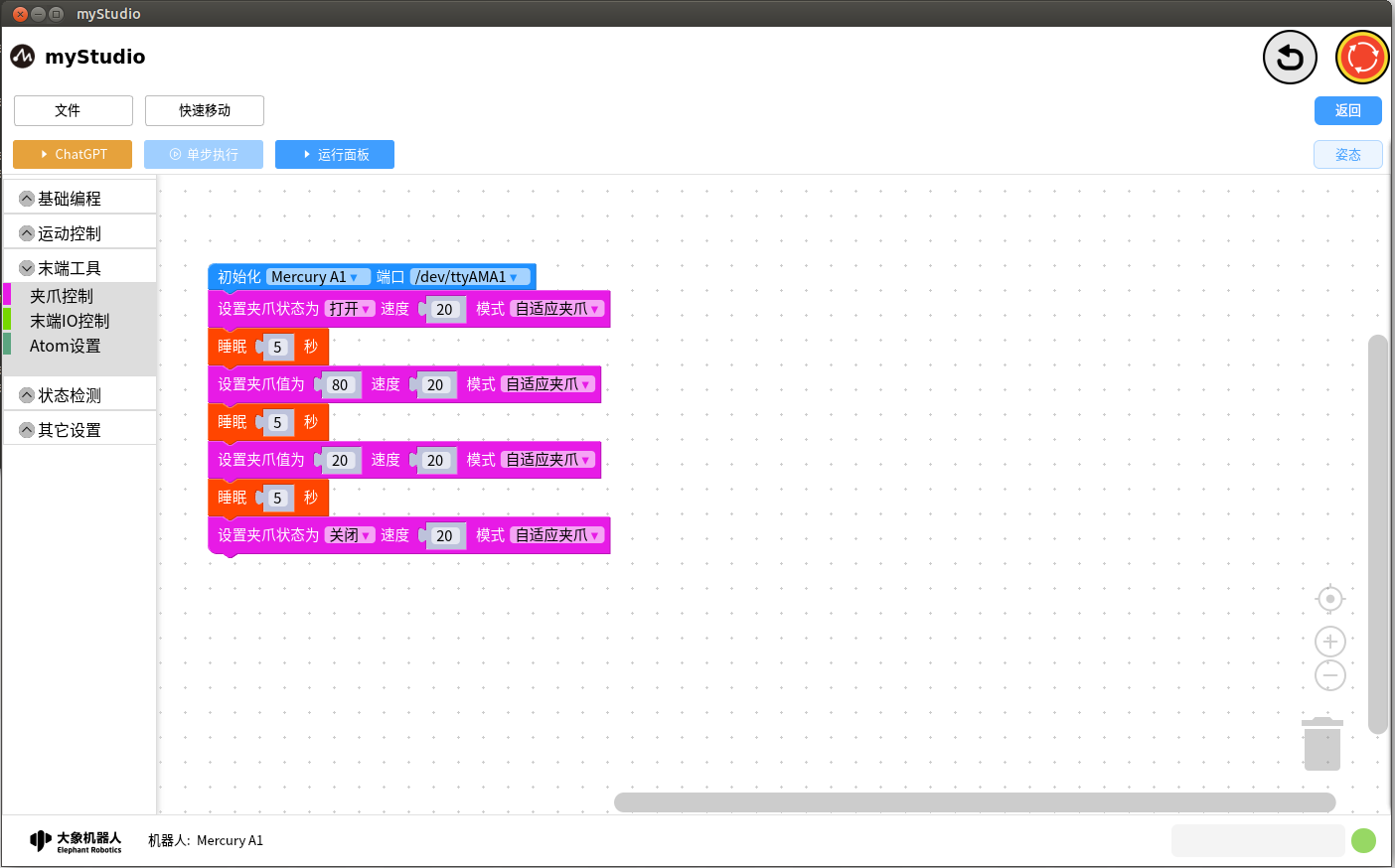
代码的执行效果:
- 控制自适应夹爪以 20 的速度打开
- 等待 5 秒
- 控制自适应夹爪以 20 的速度 到达 值 为 80 的位置
- 等待 5 秒
- 控制自适应夹爪以 20 的速度 到达 值 为 20 的位置
- 等待 5 秒
- 关闭夹爪
注意:
如果您无法从上面的示例中控制夹爪,也许您需要将夹爪模式设置为 透传模式
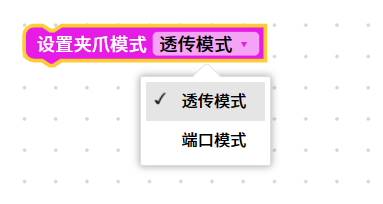
设置完后,然后再次运行小案例代码。