网络服务器
1 界面介绍
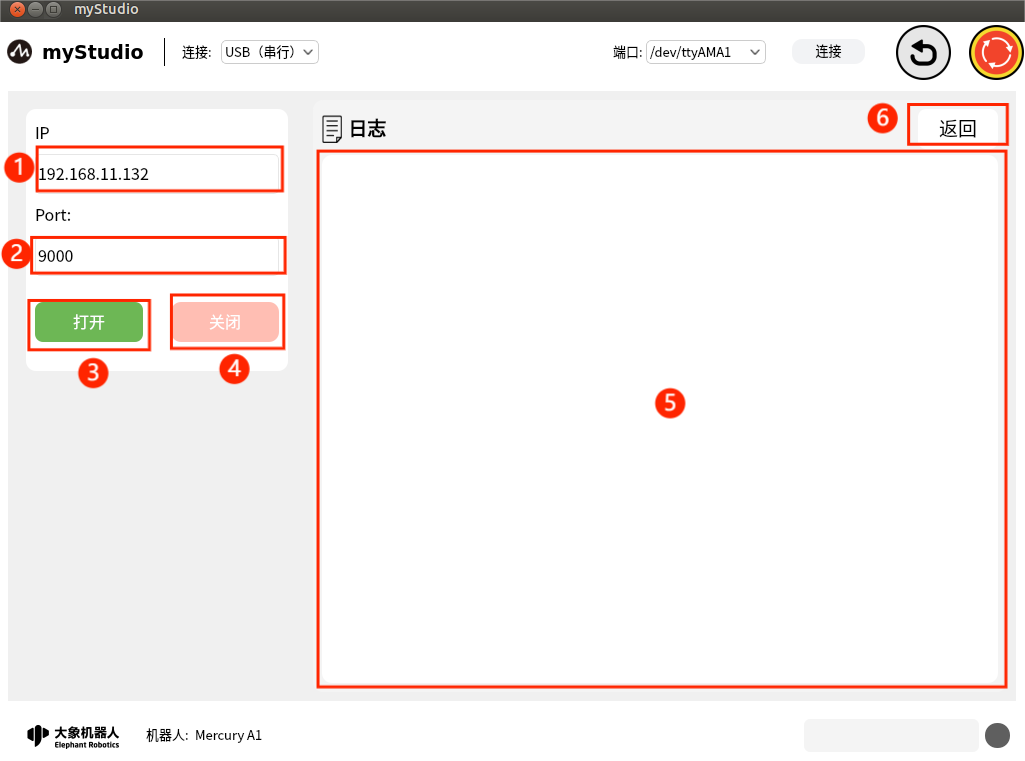
| 序号 | 功能介绍 |
|---|---|
| 1 | 机械臂系统网络的IP地址 |
| 2 | 网络端口号 |
| 3 | 打开socket服务,开启远程连接 |
| 4 | 关闭socket服务,关闭远程连接 |
| 5 | 日志信息输出区域 |
| 6 | 退出网络服务端 |
2 开启服务
注意:在开启服务之前要断开设备通信
点击 打开 按钮,开启Socket服务。
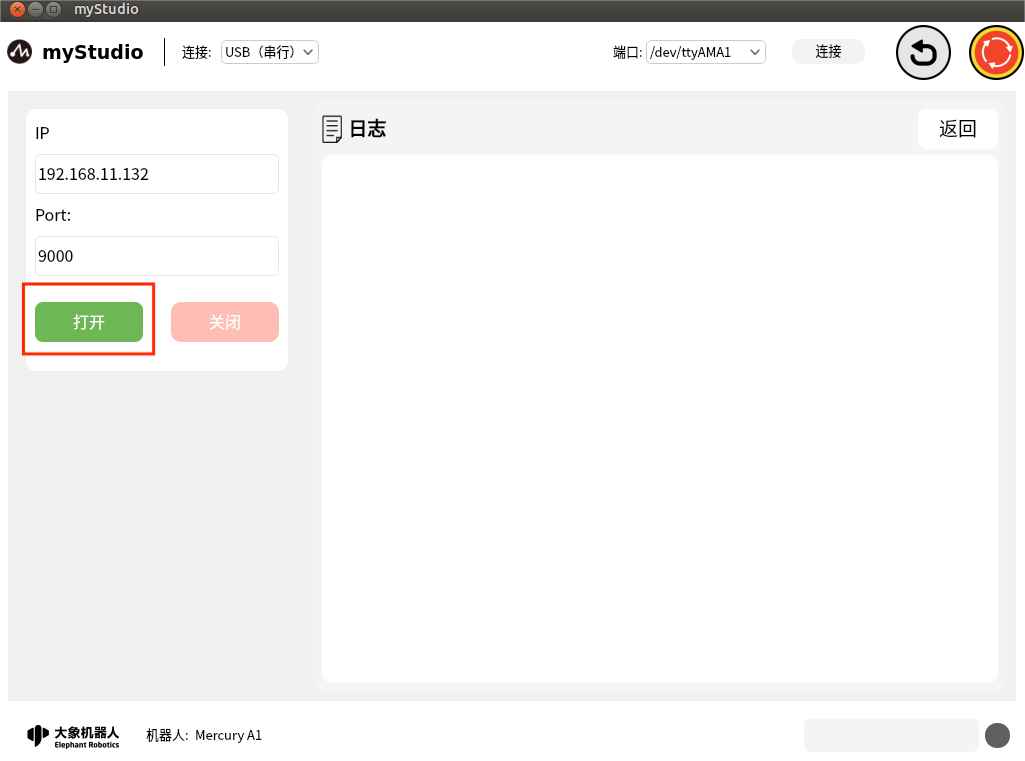
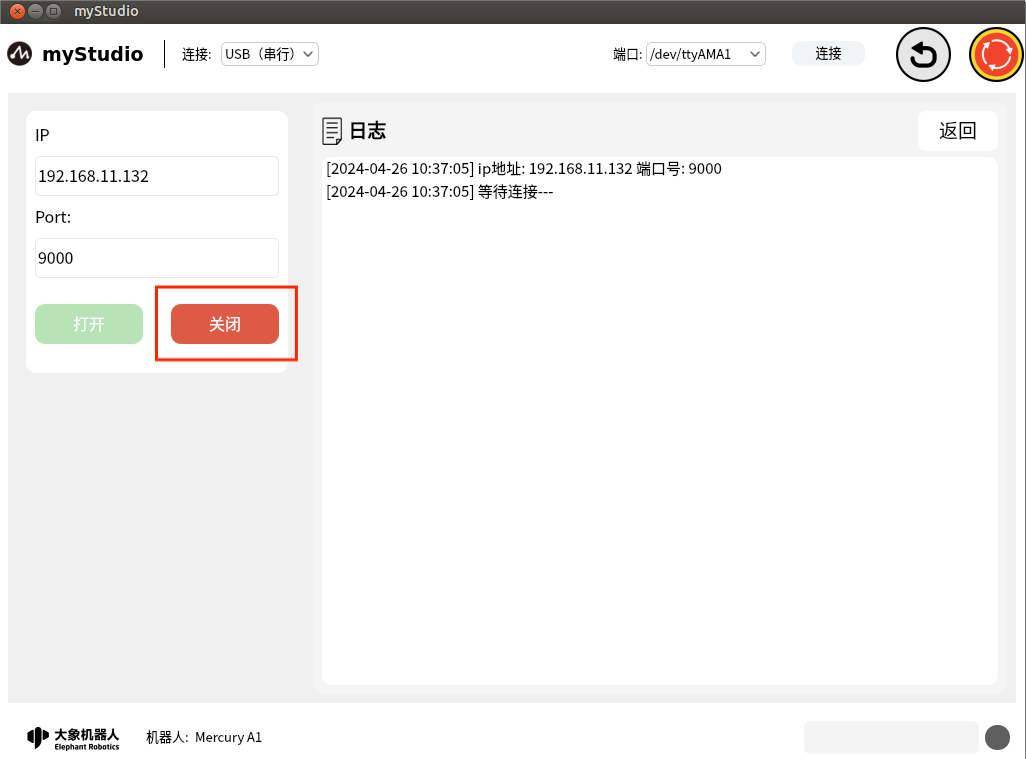
成功开启Socket服务:

3 关闭服务
注意:当关闭服务后,再次开启服务时,需要更换其他端口号,否则会提示端口被占用。
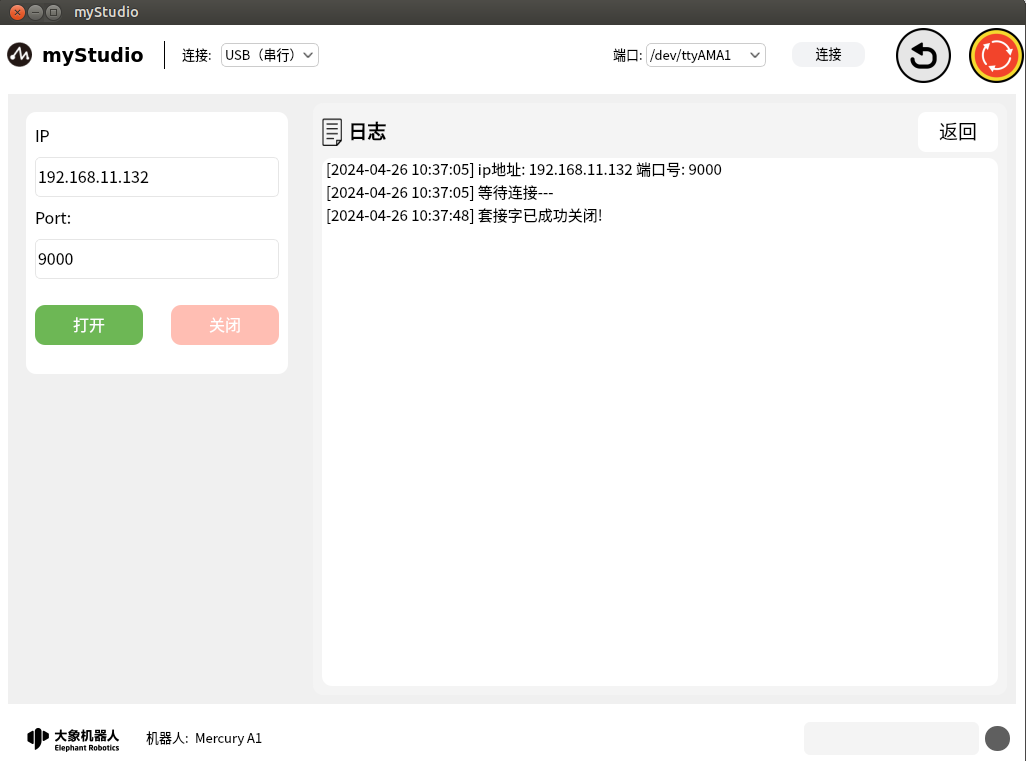
点击 关闭 按钮,关闭Socket服务。
成功关闭Socket服务:
4 远程连接-1
注意:PC端的网络需要与机械臂系统的网络使用同一网段,即使用相同网络连接。
在PC端打开myStudio软件,完成机型选择之后,选择网络通信,输入网络服务端的IP地址以及端口号。

点击 连接 按钮

点击 快速移动 图标按钮,进入快速移动页面。
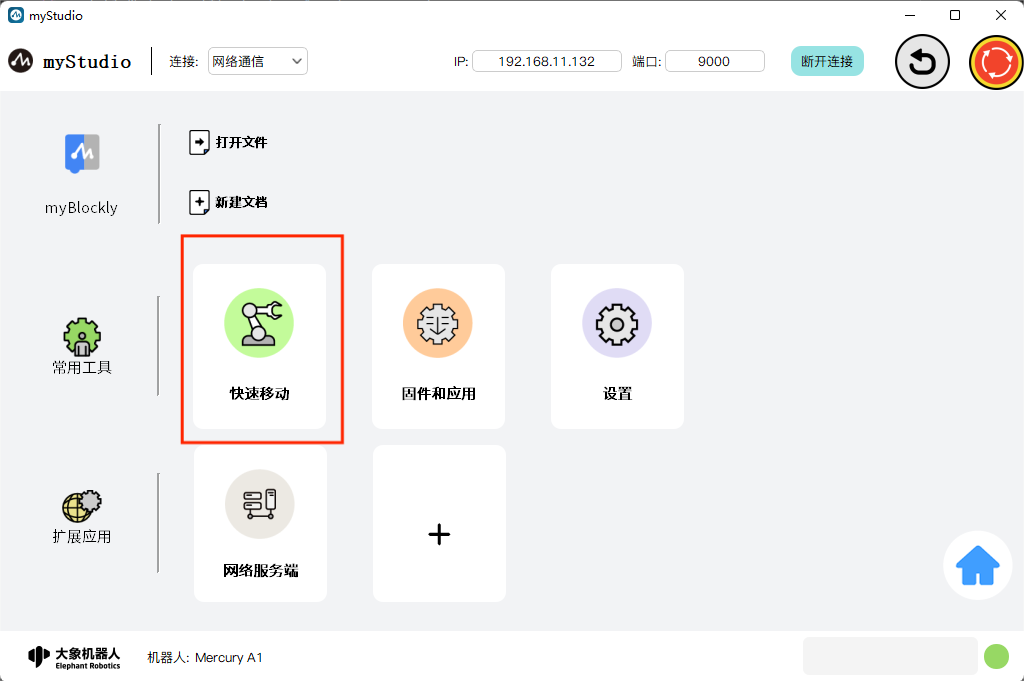
快速移动页面:根据对应的操作,实现对机械臂的运动控制。

5 远程连接-2
注意:PC端的网络需要与机械臂系统的网络使用同一网段,即使用相同网络连接。
MercurySocket类实例化
# 从pymycobot库导入MercurySocket类
from pymycobot import MercurySocket
# 连接机器人服务器
mercury_client = MercurySocket("192.168.11.132", 9000)
简单角度控制
# 从pymycobot库导入MercurySocket类
from pymycobot import MercurySocket
# 连接机器人服务器
mercury_client = MercurySocket("192.168.11.132", 9000)
# 关节1转动50度
mercury_client.send_angle(1, 50, 50)
注意: 使用代码编程连接方式,PC端需要有Python以及pymycobot的环境,具体安装方式请查看对应的gitbook教程文档。环境安装教程