rviz的简单介绍及使用
rviz是ROS中一款三维可视化平台,一方面能够实现对外部信息的图形化显示,另外还可以通过 rviz 给对象发布控制信息,从而实现对机器人的监测与控制。
1 rviz的安装及界面简介
在安装ros时,如果执行的完全安装,rviz已经安装好了,您可以直接尝试运行;如果没有完全安装,可单独安装rviz:
# Ubuntu20.04
sudo apt-get install ros-noetic-rviz
安装完成后,请先打开一个新的终端(快捷键Ctrl+Alt+T),输入如下指令:
roscore
然后再打开一个一个新的终端(快捷键Ctrl+Alt+T)输入命令打开rviz
rosrun rviz rviz
# 或
rviz
打开rviz,显示如下界面:
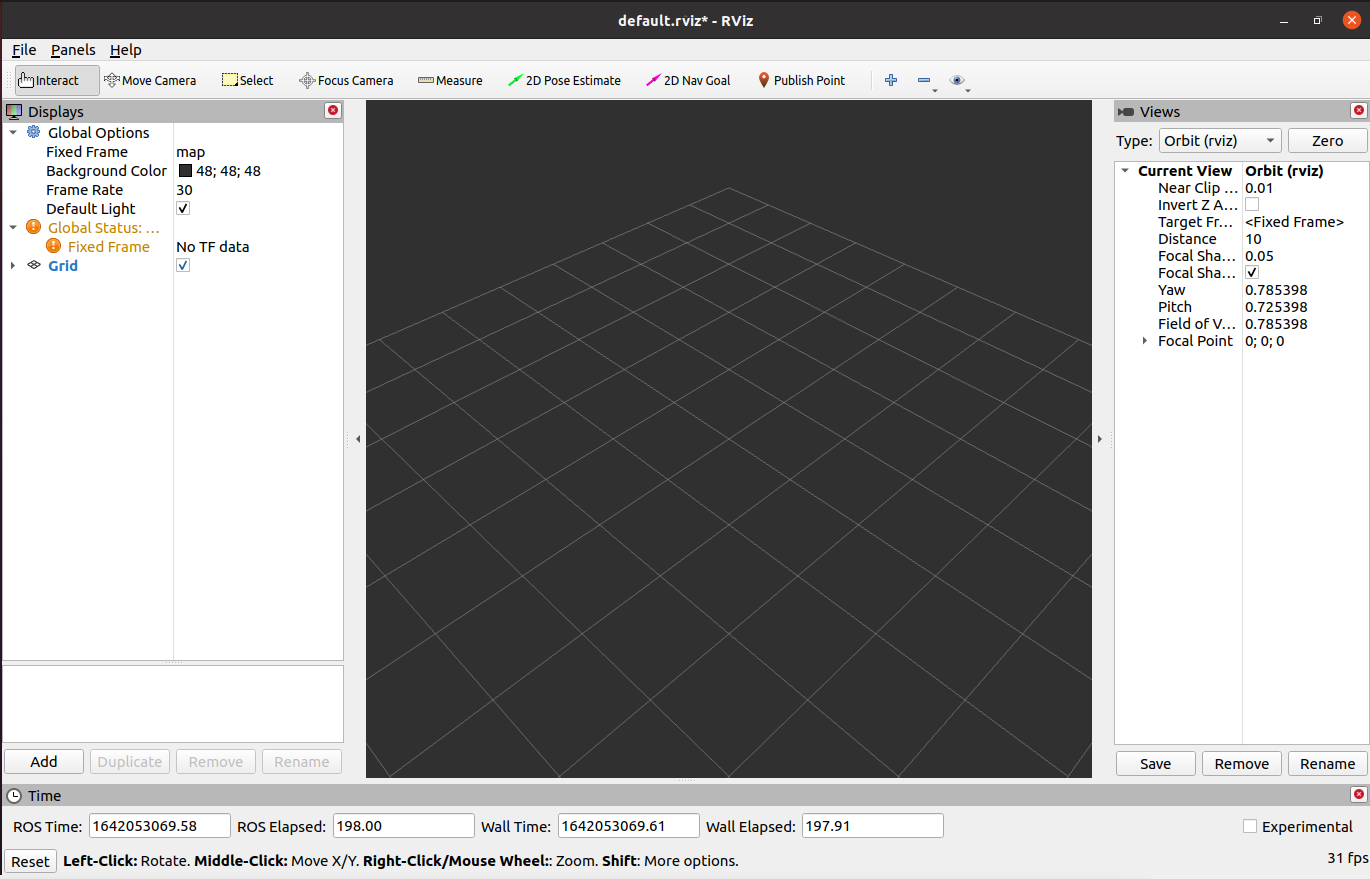
1.1 各个区域介绍
- 左侧为显示器列表,显示器是在3D世界中绘制某些内容的东西,并且可能在显示列表中具有一些可用的选项。
- 上方是工具栏,允许用户用各种功能按键选择多种功能的工具
- 中间部分为3D视图: 它是可以用三维方式查看各种数据的主屏幕。3D视图的背景颜色、固定框架、网格等可以在左侧显示的全局选项(Global Options)和网格(Grid)项目中进行详细设置。
- 下方为时间显示区域,包括系统时间和ROS时间等。
- 右侧为观测视角设置区域,可以设置不同的观测视角。
本部分我们只进行粗略的介绍,如果您想了解更多详细的内容,可以前往用户指南进行查看。
2 简单使用
通过launch文件启动
本例子建立在您已经完成环境搭建,并成功将本公司的代码从GitHub上复制下来的基础上。
点击桌面上的ROS1 Shell图标或者桌面下方栏的对应图标,打开ROS1环境终端:



然后运行命令:进行ROS的环境配置。
cd ~/catkin_ws/
source devel/setup.bash
再输入:
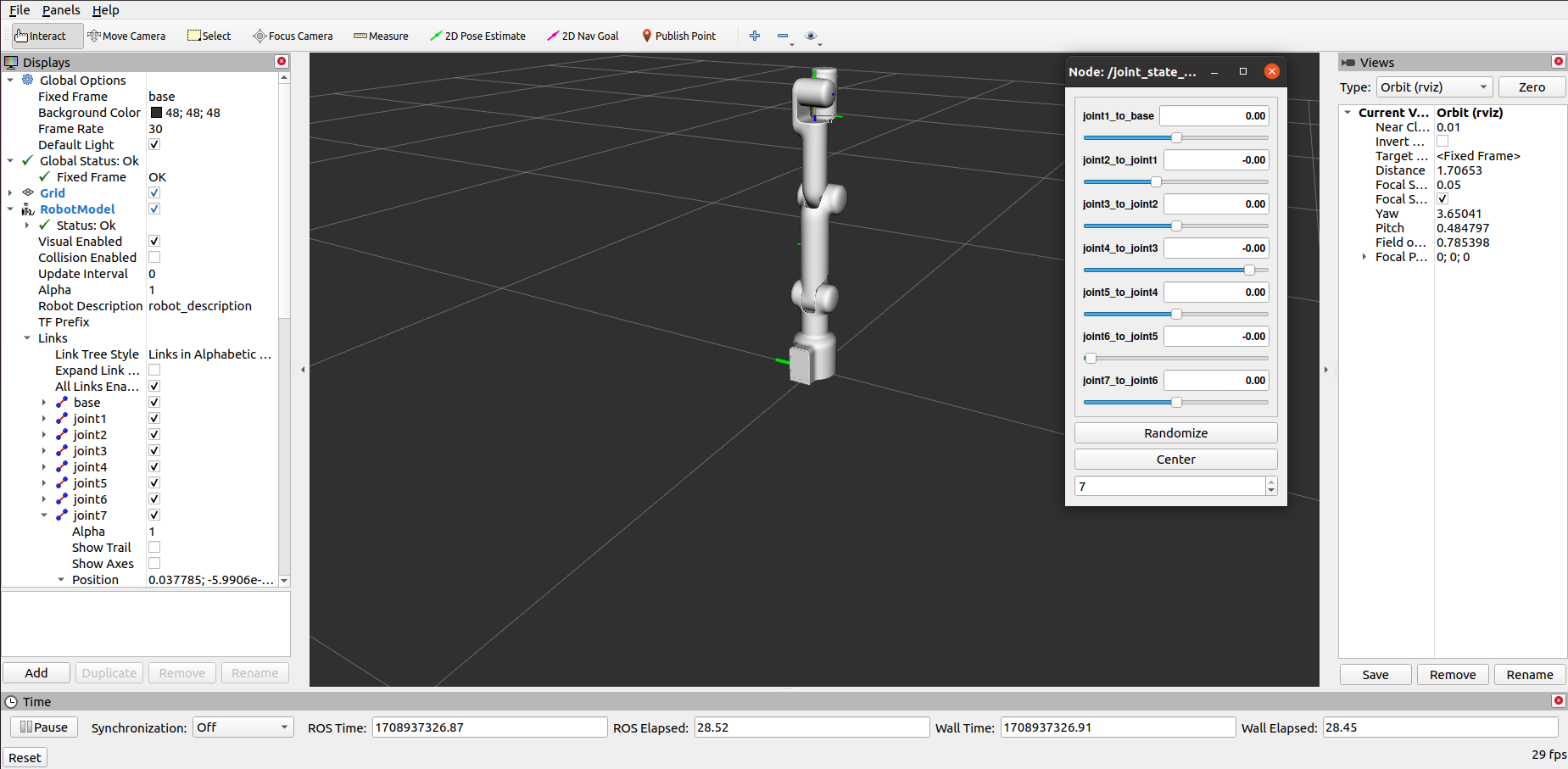
roslaunch mercury_a1 test.launch
打开rviz,并得到如下结果:
如果您想了解更多rviz的相关资料信息,您可以前往官方文档进行查看