Catalogue
Introduction
1 产品介绍
1.1 设计理念
1.2 应用场景
2 产品特点
2.1 功能参数
2.2 控制器参数
2.3 结构参数
2.4 电子参数
2.5 坐标系
3 用户须知
3.1 安全守则
3.2 运输与储存
3.3 维护和保养
3.4 常见问题解答
4 首次安装及使用
4.1 产品标准表
4.2 产品开箱指南
4.3 上电测试指南
5 基础功能
5.1 系统使用说明
5.2 软件使用说明
1 myPanel
2 myStudio
机型选择
功能选择
blockly
blockly 首次使用
blockly 界面介绍
控制机械臂回零
快速填入积木块数据
学习使用快速移动
学习使用坐标控制
使用 chatGPT 与 blockly 进行交互
单积木块执行
程序控制
自适应夹爪的使用
吸泵的使用
吸泵的使用
积木块 API 详解
快速移动
固件与应用
通用固件
功能应用
文档手册
视频教程
Github
在线商城
联系我们
设置
扩展
网络服务器扩展
6 SDK 开发指南
6.1 Python
1 环境搭建
2 API 说明
3 TCP/IP 控制
4 夹爪的使用
5 机器人异常处理
6.2 机器人操作系统 1 (ROS1)
1 环境搭建
2 ROS 基础
3 Rviz 使用
4 基本功能案例
6.3 机器人操作系统 2 (ROS2)
1 环境搭建
2 ROS2 基础
3 Rviz2 使用
4 基本功能案例
6.4 C plus plus (C++)
1 CPlus 下载
2 构建
3 API
4 使用案例
6.5 基于通信协议包开发
7 场景案例
8 资料下载
8.1 产品信息
8.2 产品图纸
8.3 软件以及开源代码
8.4 系统镜像资料
8.5 宣传材料
9 关于我们
9.1 大象机器人
9.2 如何阅读
9.3 联系我们
Published with GitBook
In this Chapter:
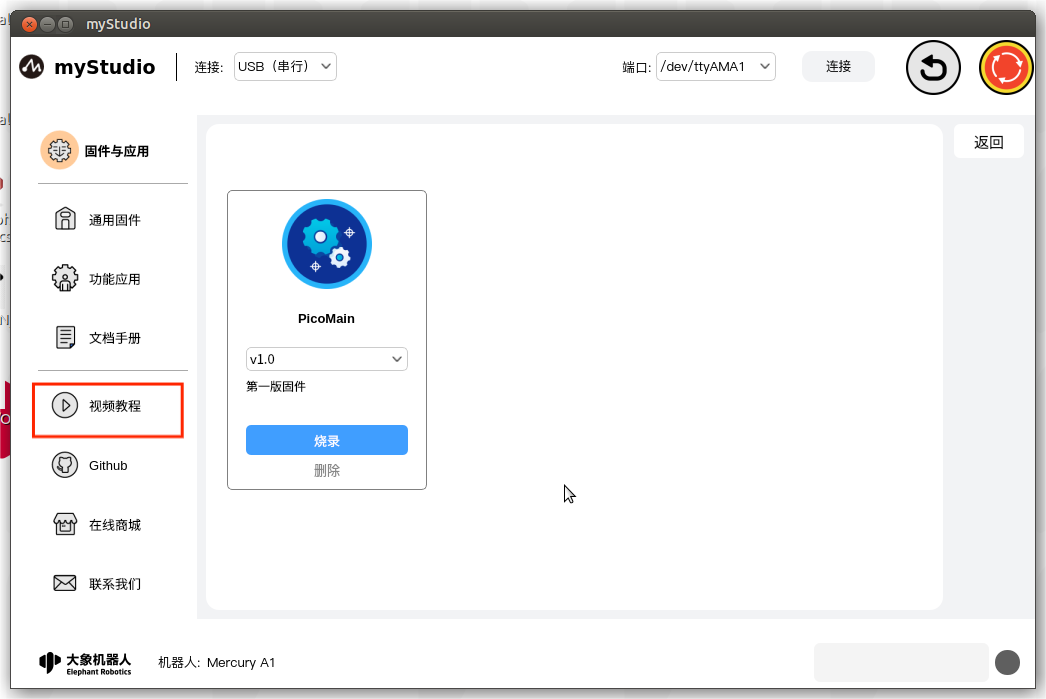
视频教程
固件与应用-视频教程
此功能为网页跳转链接,点击以后,会自动打开默认的浏览器并且打开官方的视频号。英文版本会跳转到YouTube,中文版本会跳转到bilibili。
results matching "
"
No results matching "
"