1 .下载
MercuryCpp 编译运行
1.1源代码下载
在github上下载MycobotCpp。
1.2 动态库下载
Dependency library download(如需下载最新版本,请选择“Windows”或“Linux”,Windows操作系统需下载后缀。zip, Linux操作系统需下载。tar.gz)
2 在Linux上运行
将serial文件夹和mercurylib文件夹拷贝到er/目录下。Serial是串行通信库,mercurylib是c++库。我自己的代码是用main.cpp编写的。
2.1编译和构建
- mkdir build && cd build
- cmake ..
cmake --build .
2.2 运行
命令行运行:。/MercuryLIB(在本例中,从构建目录)
注意
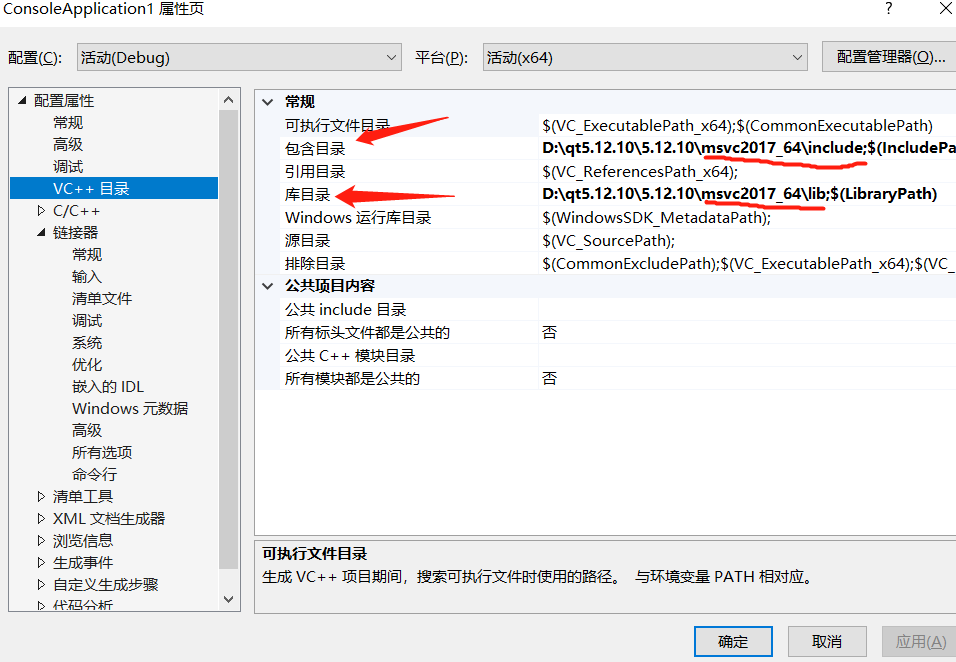
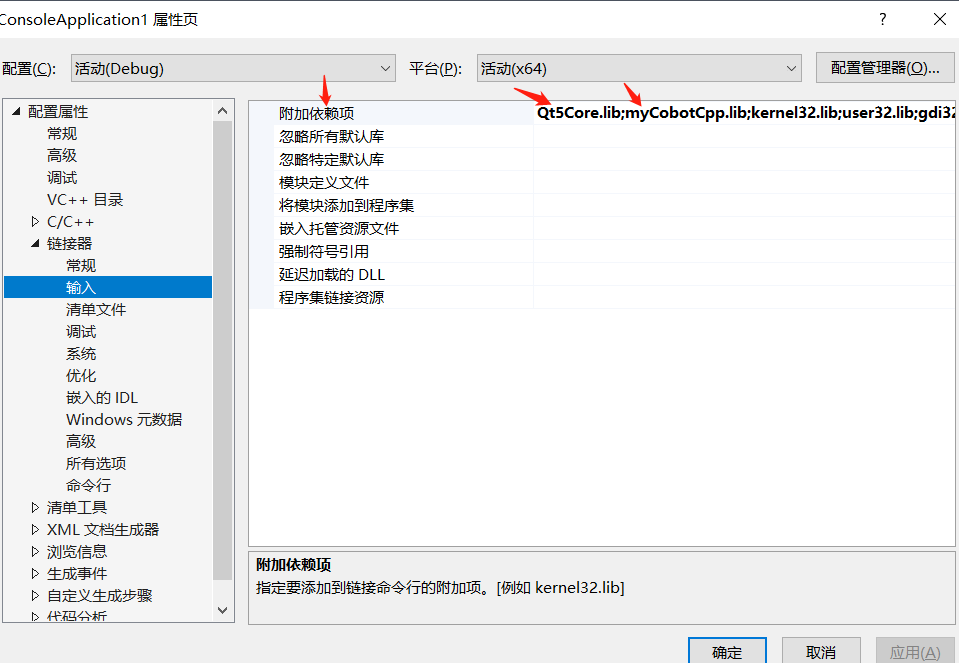
如果你不使用cmake编译,就像你直接在MFC中使用它一样,按照如下所示进行配置: