ROS2 介绍
ROS2 的前身是 ROS,ROS 即机器人操作系统(Robot Operating System)。但 ROS 本身并不是操作系统,而是一个软件库和工具集。 Ros 的出现解决了机器人各个组件的通信问题。后来,越来越多的机器人算法被集成到 ROS 中。ROS2 继承了 ROS,比 ROS 更强大、更优秀。
1 ROS2 的设计目标和特点
ROS2 肩负着改变智能机器人时代的历史使命。在设计之初,它就考虑到要满足各种机器人应用的需求。
多机器人系统: 未来机器人不再是独立的个体,机器人之间也需要交流和协作。 ROS2 为多机器人系统的应用提供了标准的方法和通信机制。
跨平台: 机器人应用场景不同,使用的控制平台也会有很大差异。 为了让所有的机器人都能运行 ROS2,ROS2 可以跨平台运行在 Linux、Windows、MacOS、RTOS 上。
实时: 机器人运动控制和许多行为策略都要求机器人是实时的。 例如,机器人必须在 100 毫秒内可靠地检测到前方的行人,或在 1 毫秒内完成运动学和动力学计算。 ROS2 是像这样实时提供基本要求的。
产品化: 大量的机器人已经进入我们的生活,未来还会越来越多,ROS2 不仅可以用于机器人研发阶段,还可以直接安装在 产品并进入消费市场。 这也对 ROS2 的稳定性和鲁棒性提出了巨大的挑战。
项目管理: 机器人开发是一项复杂的系统工程。 设计、开发、调试、测试、部署全过程的项目管理工具和机制也将在 ROS2 中得到体现,方便我们开发机器人。
2 发行版本
ROS2 和 Ubuntu 对应的发行版本和维护周期。
| ROS2 版本 | 发布日期 | 维护期限 | Ubuntu 版本 |
|---|---|---|---|
| Dashing | 2019.5 | 2021.5 | Ubuntu 18.04 (Bionic Beaver) |
| Eloquent | 2019.11 | 2020.11 | Ubuntu 18.04 (Bionic Beaver) |
| Foxy | 2020.6 | 2023.5 | Ubuntu 20.04(Focal Fossa) |
| Galactic | 2021.5 | 2022.11 | Ubuntu 20.04(Focal Fossa) |
| Humble | 2022.5 | 2027.5 | Ubuntu 22.04(Jammy Jellyfish) |
3 ROS 和 ROS2 的比较
ROS2 重新设计了系统架构。两代 ROS 之间的架构变化如下:
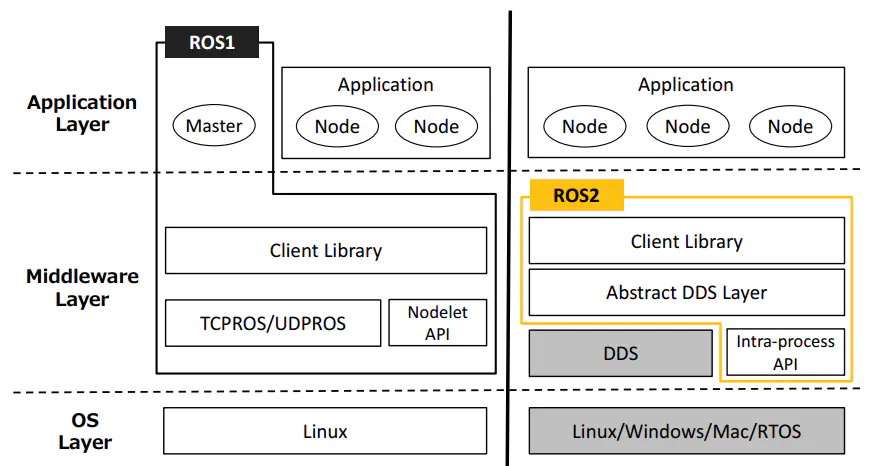
OS Layer: OS 层。在 ROS2 中,它可以构建在 linux 或其他系统上,甚至是没有操作系统的裸机。
Middleware Layer: 中间件层。ROS1 的通信系统基于 TCPROS/UDPROS,而 ROS2 的通信系统基于 DDS。 DDS 是分布式实时系统中数据发布/订阅的标准解决方案。
Application Layer: 应用层。ROS1 依赖于 ROS Master,而在 ROS2 中,节点之间使用了一种名为“Discovery”的发现机制来帮助彼此建立连接。
ROS 设计了一套完整的通信机制(主题、服务、参数、动作)来简化机器人开发。 通过这种机制,可以连接机器人的各个部件。 这种机制设计了一个叫做 Ros Master 的节点,所有其他组件的通信都必须经过 master 节点。 一旦主节点挂掉,就会导致整个机器人系统的通信崩溃! 所以不能利用 Ros 的不稳定性来做一些自动驾驶等高风险的机器人。 此外,还有以下缺点:
- 基于 TCP 的通信实时性差,系统开销大
- 对 python3 支持不友好
- 消息机制不兼容
- 无加密机制,安全性低
ROS2 首先移除 ROS 中存在的 master 节点。 去掉主节点后,各个节点可以通过 DDS 节点相互发现,各个节点是平等的,可以实现一对一、一对多、多对多的通信。 使用 DDS 进行通信后,可靠性和稳定性得到了增强。
与只支持 Linux 系统的 ROS 相比,ROS2 还支持 windows、mac 甚至 RTOS 平台。