步骤 1: 为Atom刻录最新版本的atomMain。(最新固件已在出厂时刻录)。
第 2 步: 在桌面上打开 myBlockly 图形软件
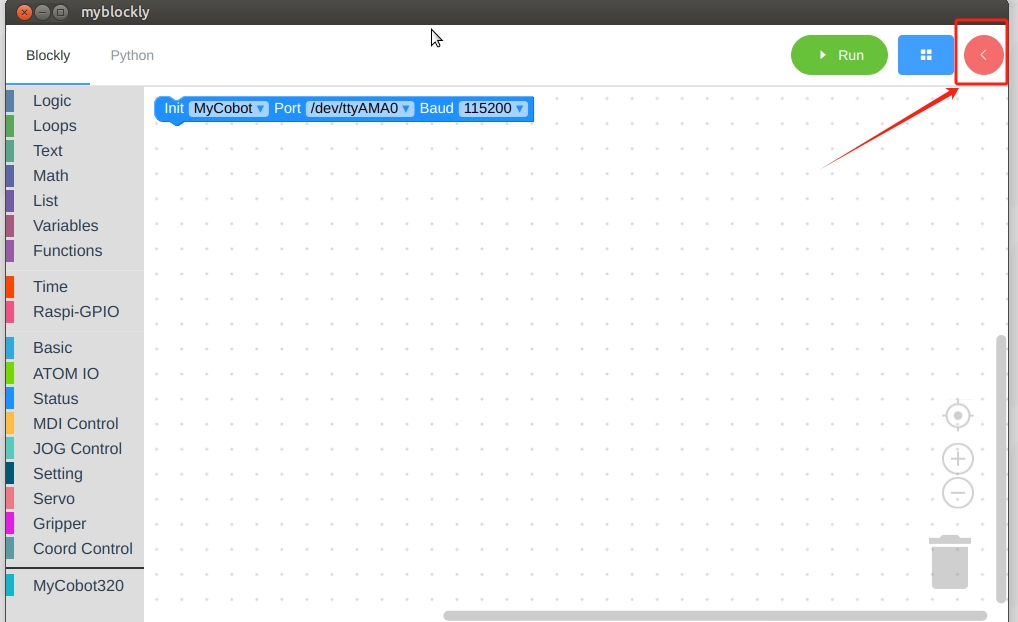
步骤 3: 在 myBlockly 软件中打开右侧控制栏
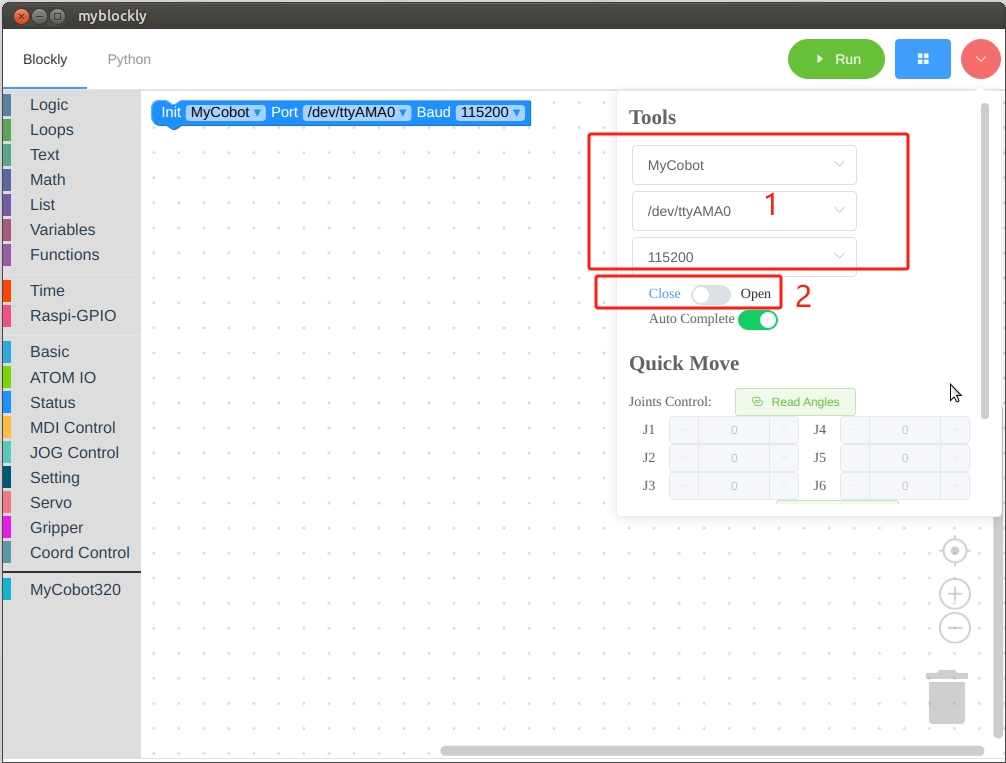
步骤 4: 确认机器人手臂的串行端口和波特率后,点击打开连接按钮
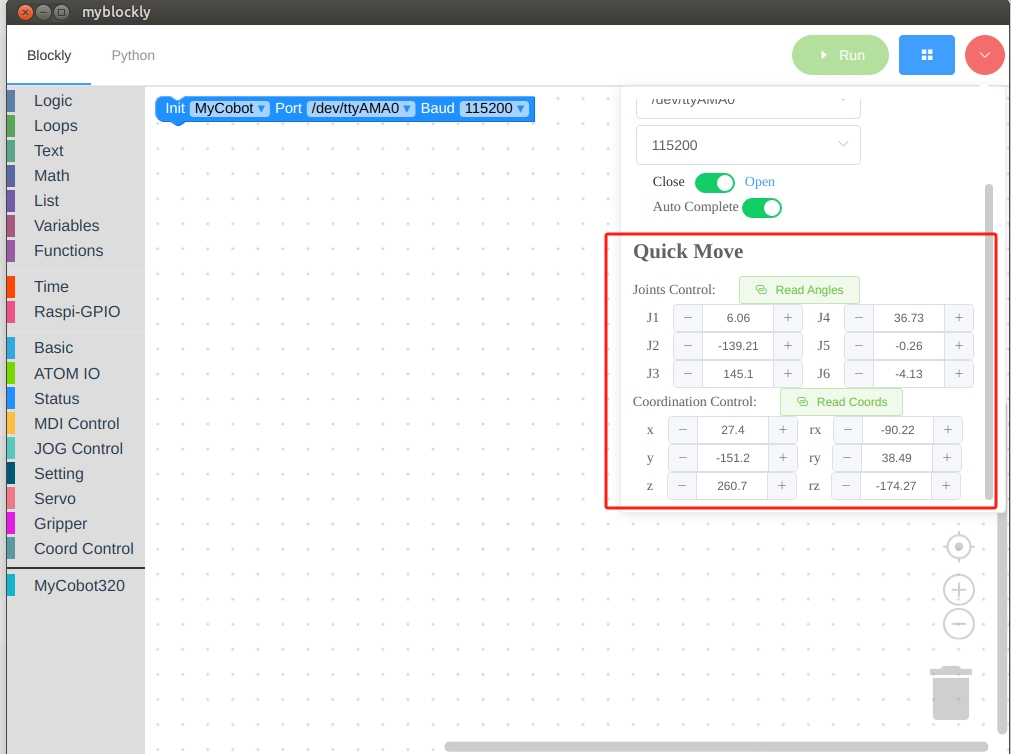
步骤 5: 完成步骤 4 后,下方的快速运动模块将实时显示机械臂的角度信息和坐标信息。您可以通过点击加号和减号按钮对机械臂进行简单控制。
← 上一页 | 下一章