硬件问题
Q1: myCobot 320 PI 的关节 1 和关节 6 的最大角度是多少?
A1:
| 关节 | mino | maxo | max speedo /s | max accelerationo/s2 |
|---|---|---|---|---|
| J1 | -165 | 165 | 150 | 200 |
| J2 | -165 | 165 | 150 | 200 |
| J3 | -165 | 165 | 150 | 200 |
| J4 | -165 | 165 | 150 | 200 |
| J5 | -165 | 165 | 150 | 200 |
| J6 | -175 | 175 | 150 | 200 |
Q2:六个舵机是由什么控制的?
A2: 舵机是由顶部的 atom 来进行控制的。
Q3: atom 在机械臂中的作用是什么?
A3: 它通过正向、逆向运动学和坐标切换等算法来控制机器人。Atom 暂时没有开源。
有关通信的问题
Q1: 为什么用 HDMI 电缆连接了机械臂,但屏幕却没有显示?是否需要下载端口驱动程序?
A1: 检查连接是否正确,电源是否已打开。尝试使用其他接口并稳定插入接口。无需下载端口驱动程序。
Q2: 不同机械臂支持哪些版本的通信接口?
A2: 基于微处理器的机械臂支持 socket 通信 TCP;基于微控制器的机械臂可以 USB 转串口通信。
Q3: 机械臂的通信频率是多少?
A3: 10-20Hz.
关于参数的问题
Q1: 机械臂的速度单位是什么?
A2: 180°/s.
硬件问题解决方法
如何应对机械臂的抖动?
Step 1: 通过 myStudio 刻录最新版本的 ATOM。
Step 2: 升级 pymycobot。点击 Win+R,然后输入 cmd 进入终端。输入
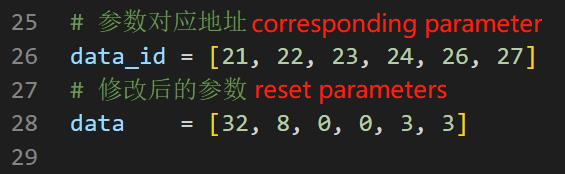
pip install pymycobot --upgrade --user然后按回车键。Step 3: 访问 GitHub 下载 pid_read_write.py。根据提示信息重置转向引擎的各个参数。然后再次运行系统。
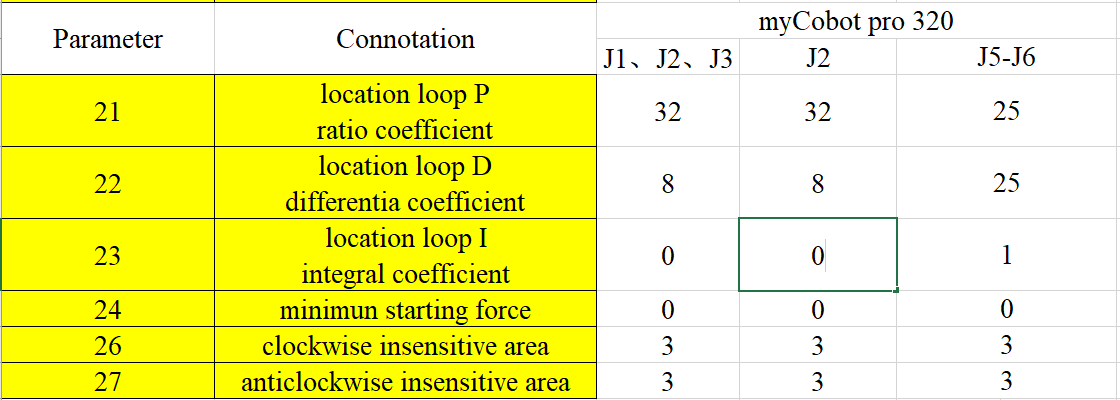
注意根据下图中给出的数据设置参数。
关于末端夹持器
Q1: 自适应夹爪是不能完全闭合吗?
A1: 夹爪本身是会有一定间隙存在,不是完全闭合的,您可以通过增加之间的垫片厚度调节。
Q2: 自适应夹爪是什么通讯?
A2: 是 ttl 通讯。
Q3: mycobot320 末端提供什么通讯?
A3: mycobot320 末端提供 485 通讯接口。
Q4: 如何将 USB 摄像头固定在机械臂末端呢?
A4: 需要使用法兰固定,可以自主进行购买。
其它问题
Q1: 为什么在使用过程中电机电源会关闭?
A1: 因为电机温度太高,无法使用。请等待几分钟后再重新使用。
Q2: 机械臂是否支持基于 Android 的开发?
A2: 我们不支持 Android 开发。如果您想自己开发,我们可以为您提供端口协议。