基础功能使用

 |
本章主要解释产品的基本功能用法和基本软件的使用。本章至关重要,应仔细阅读。在实际应用机器人之前,请确保正确理解所述操作。 |
|---|---|
针对 myCobot 系列产品,我们推出了专门用于机器人应用和维护的软件,供用户使用。其中,miniRoboflow、myBlockly 和 myStudio 是用户使用机器人的必备工具。本章将详细介绍这三款软件的使用方法。
功能说明
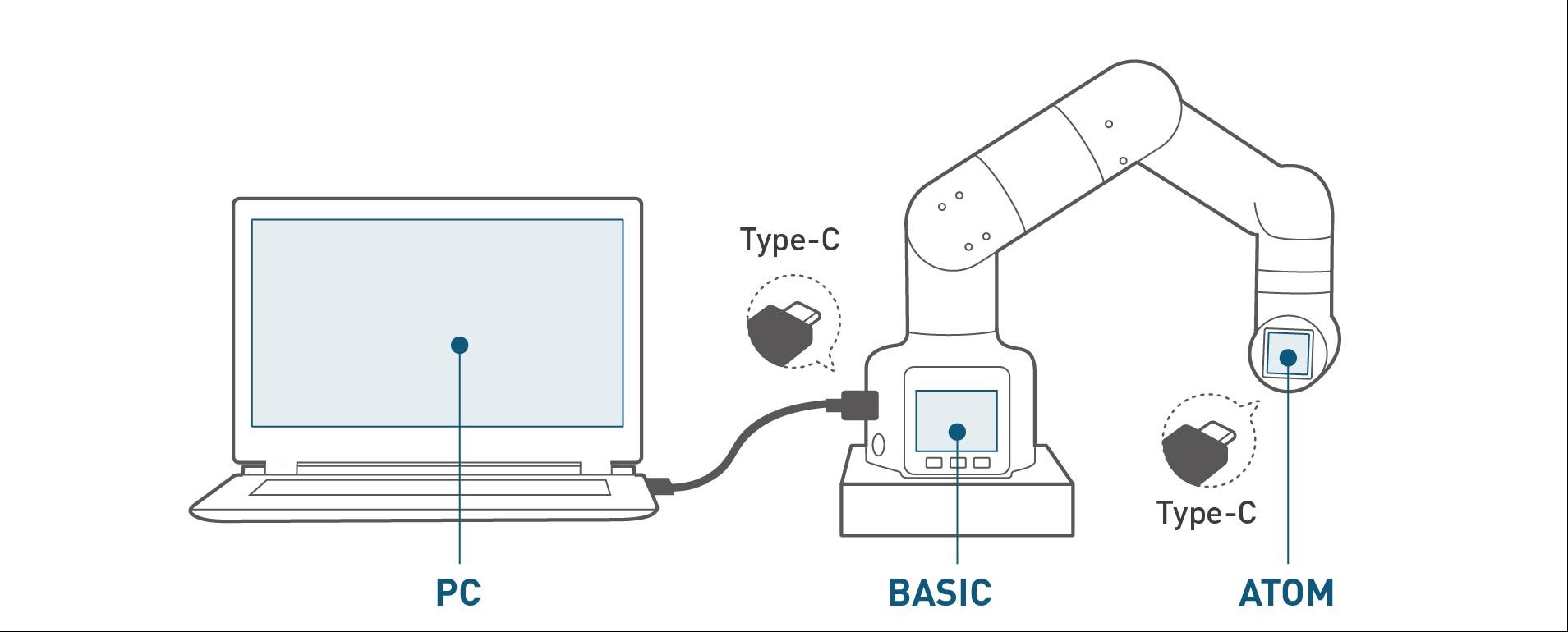
myCobot 320 机器人由三个控制器部件组成:Basic(底座上带有按钮的小屏幕,PI 版本没有)、Pico(底座上平面 Type-C 接口内的芯片)和 Atom(机器人末端执行器上的 LED 灯板)。
基本控制器负责处理外部交互,将数据转换为机器人可以识别的信息。因此,您可以通过 Basic Type-C 端口使用 USB 线路连接电脑。(在屏幕左侧)。
Pico 控制器管理机器人运动算法、关节控制和底部 IO 控制。(正常使用时无需连接)。
Atom 控制器负责处理来自工具接口和 IO 控制的数据信息。这三个组件共同协作,确保机器人正常运行。(正常使用时无需连接)。
小节跳转
5.1 系统使用说明
本节介绍开发之前所要具备掌握的 Linux 操作系统基础知识,远程连接系统的网络配置和提供刷镜像系统操作的使用说明。5.2 软件使用说明
本节说明机器内置提供的软件(myBlockly、myStudio),并且提供使用要求、软件更新和卸载的使用教程,提供软件用户界面的介绍和使用教程,并且说明使用场景。5.3 固件功能说明
本节提供固件更新日表格,说明改动后的提升效果,提供刷写固件的使用教程。