通信与报文命令 环境搭建
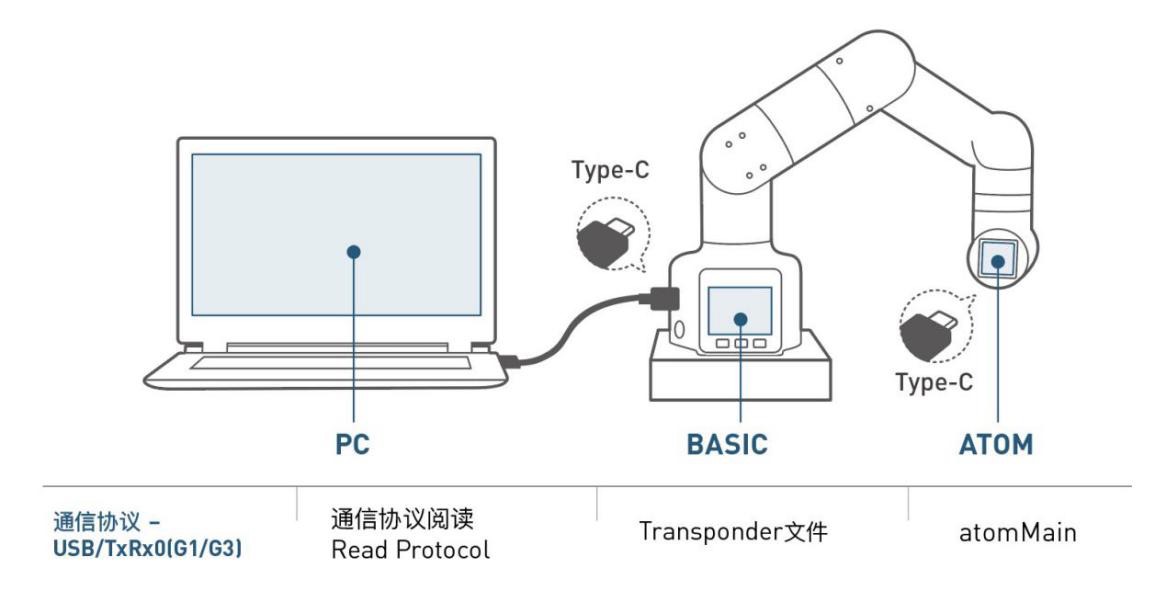
注意:使用通信协议直接通信,通过使用 mystudio 烧录相应的固件。其中,在 Basic 中烧录 Minirobot ,选择 transponder 功能,在 Atom 中烧录最新版的 AtomMain 。烧录相应的固件。
注意:通信与报文命令的适用设备有 myCobot 280-M5、myCobot 320-M5、myPalletizer 260、myCobot 280-Pi 以及 myCobot 320-Pi。
USB通信设置 Communication Settings
请确保您的通信设置如下
- 总线接口: USB Type-C连接
- 波特率: 115200
- 数据位: 8
- 奇偶校验:无
- 停止位: 1

命令帧说明及单一指令解析
主机Basic向从机发送数据,从机接收到数据后进行解析,如包含返回值的指令,从机会在500ms内返回给主机。
命令帧发送与接收格式
所有命令为十六进制,发送与接收格式一致。
每个通信命令必须包含以下5个部分,其中3、4可为空。
- 1 命令针头: 0xFE 0xFE
- 固定
- 必含
- 2 有效命令长度: 0x02 ~ 0x10
- 以下所有命令的长度
- 必含
- 3 命令序号: 00 ~ 8F
- 现已开发了多种命令
- 可为空
- 4 命令内容: 若干
- 可为空
- 5 命令结束: 0XFA
- 固定
- 必含
指令解析
主机Basic向从机发送数据,从机接收到数据后进行解析,如包含返回值的指令,从机会在500ms内返回给主机。
| 类型 | 数据描述 | 数据长度 | 说明 |
|---|---|---|---|
| 命令帧 | 头字节0 | 1 | 帧头识别,0XFE |
| 头字节1 | 1 | 帧头识别,0XFE | |
| 数据长度字节 | 1 | 不同指令对应不同长度数据 | |
| 命令字节 | 1 | 视不同命令而定 | |
| 数据帧 | 数据 | 0-16 | 命令附带数据,视不同命令而定 |
| 结束帧 | 结束字节 | 1 | 停止位,0XFA |