ROS建立方块模型
在ros中建立方块模型,首先需要开启rviz,并在rviz创建一个marker并设置Marker Topic。在python文件中初始化一个节点以及一个Marker,改变Marker的X,Y值并发布改变后的Marker,就可以实现物块的位移了。
1、启动rviz
启动ros工作目录下的mycobot_ai包内的vision.launch即可启动rviz。具体命令如下:
启动该命令前,请确保vision.launch中的port值与实际机械臂名称保持一致。
roslaunch <ros-workspace>/src/mycobot/mycobot_ai/launch/vision.launch
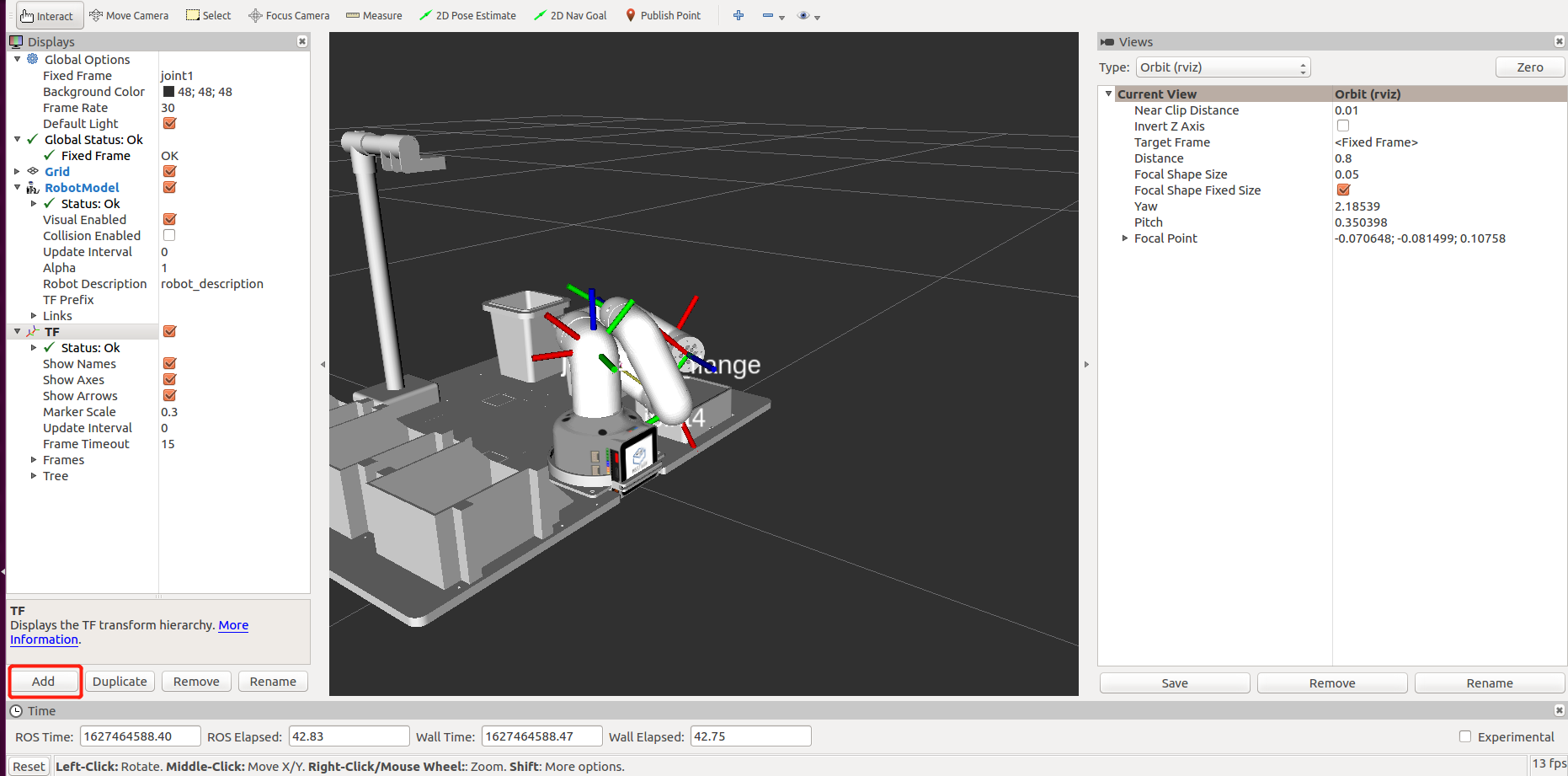
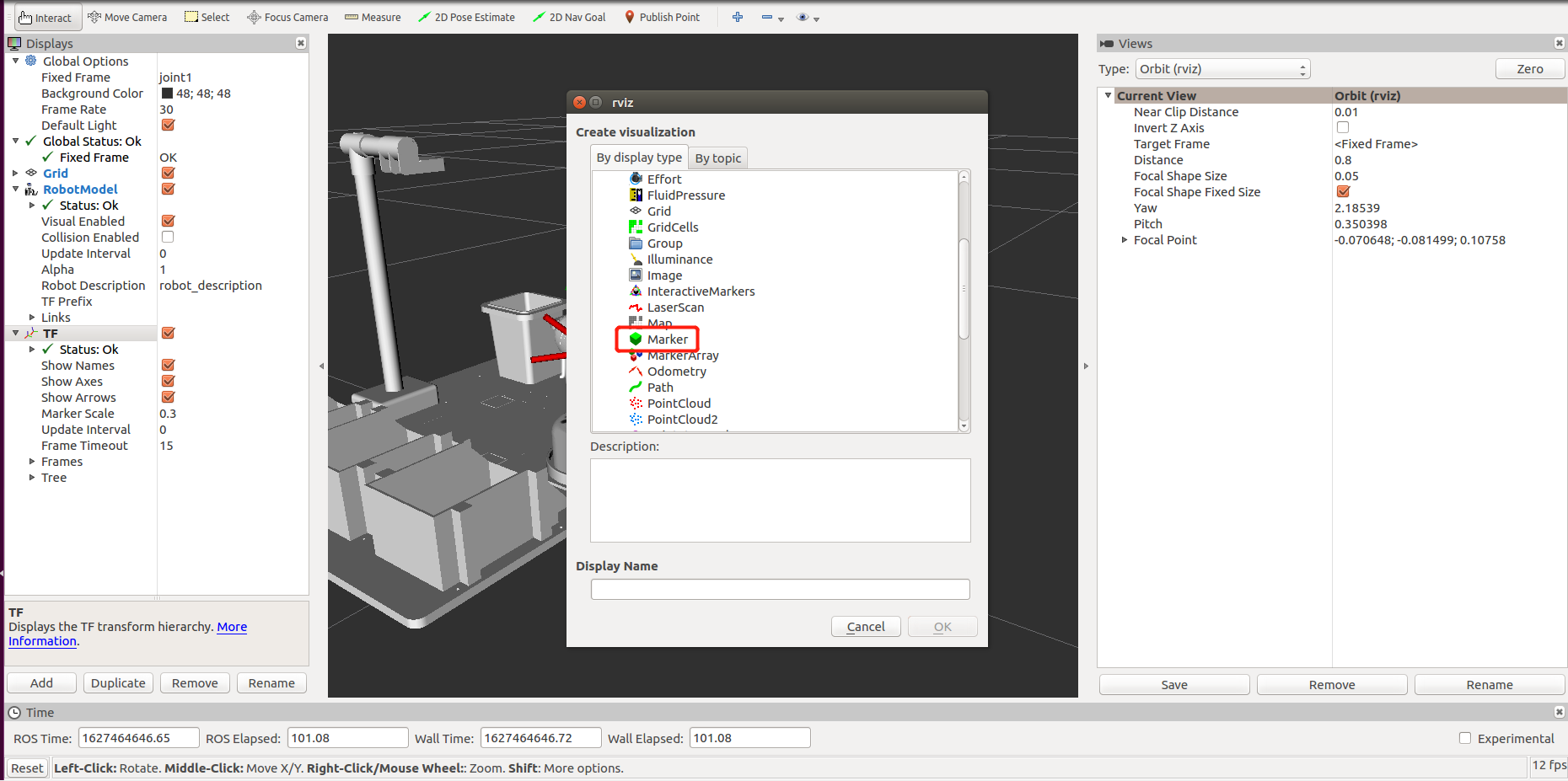
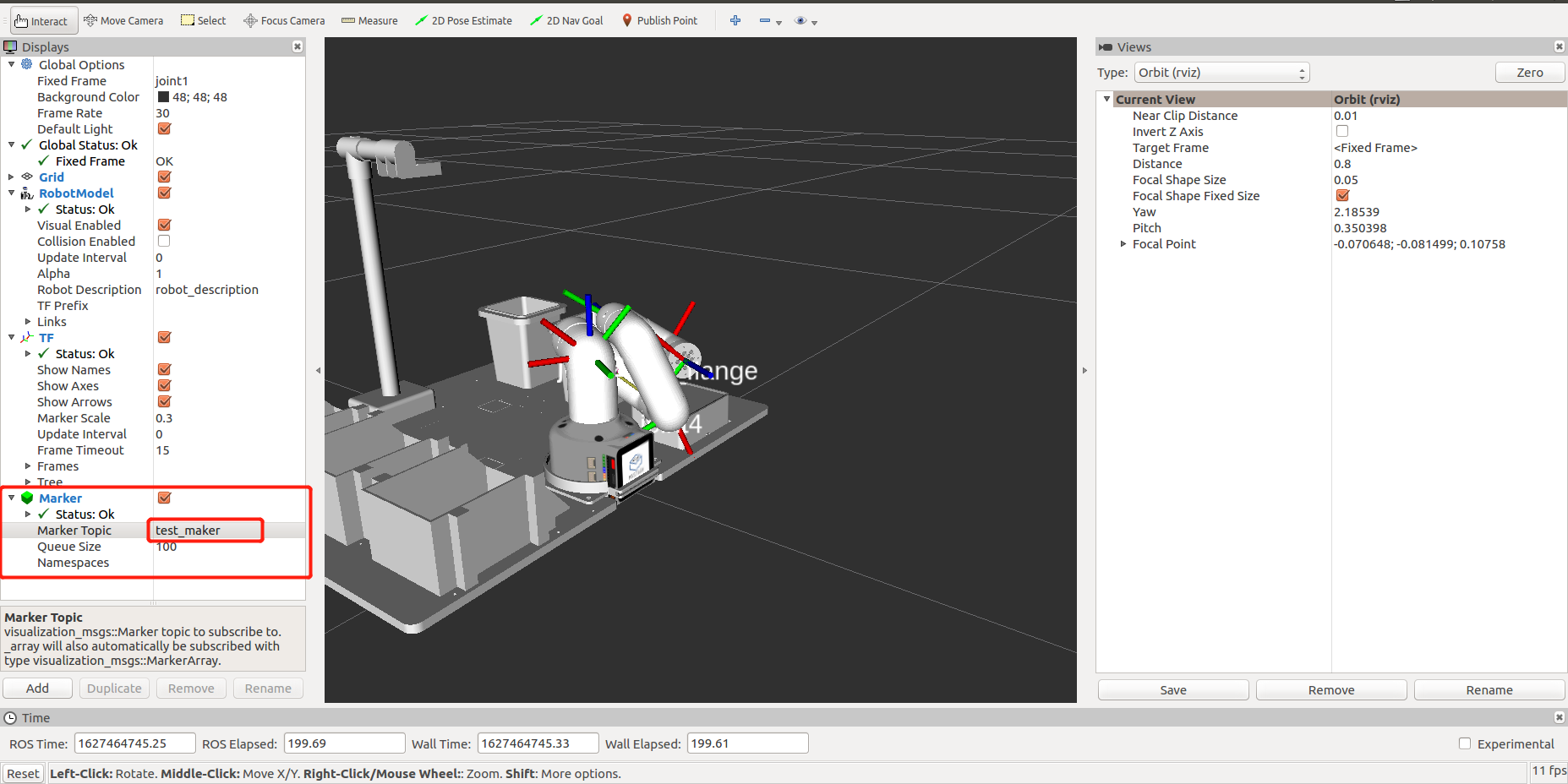
2、创建方块
在rviz界面中点击add添加一个marker,并设置Marker Topic为test_marker。如下图所示。
3、实现方块移动
开启rviz,并创建方块后,打开命令行终端运行以下命令行即可看见黄色物块在模型中运动。
python <ros-workspace>/src/mycobot/mycobot_ai/scripts/send_marker.py
4、代码讲解
首先,导入一些必要的ros依赖库。其次创建一个自定义类,在类的初始化函数中初始化一个节点、一个发布者对象以及一个Marker类。最后,为方块设置一些三维空间角度,让其在模型中移动。
这里详细讲解以下Marker对象的一些属性值:type表示类型;action表示这个Marker的一个动作;ns表示这个Marker的名称;scale表示物块的实际大小x、y、z分别表示其长、宽、高单位是米;color表示物块的颜色a表示透明度、r、g、b分别对应颜色的RGB;pose.position表示实际位置的坐标,x、y、z分别表示三维坐标的长宽高;pose.orientation表示一个四维向量;对于四维向量,如果没有特别的需求对其不了解也没有关系。
# encoding: utf-8
import rospy
import time
from visualization_msgs.msg import Marker
class Send_marker(object):
def __init__(self):
# 继承object类对象
super(Send_marker, self).__init__()
# 初始化一个节点,如果没有创建节点会导致无法发布信息
rospy.init_node("send_marker", anonymous=True)
# 创建一个发布者,用来发布marker
self.pub = rospy.Publisher("/test_marker", Marker, queue_size=1)
# 创建一个marker用来创建方块模型
self.marker = Marker()
# 配置其所属关系,其坐标均是相对于/joint1而言的。
# /joint1在模型中代表机械臂的底部
self.marker.header.frame_id = "/joint1"
# 设置marker的名称
self.marker.ns = "test_marker"
# 设置marker的类型是方块
self.marker.type = self.marker.CUBE
# 设置marker的动作为添加(没有这个名称的marker就为其添加一个)
self.marker.action = self.marker.ADD
# 设置marker的实际大小情况,单位为m
self.marker.scale.x = 0.04
self.marker.scale.y = 0.04
self.marker.scale.z = 0.04
# 设置marker的颜色,1.0表示255(这表示着一种比率换算)
self.marker.color.a = 1.0
self.marker.color.g = 1.0
self.marker.color.r = 1.0
# 初始化marker的位置以及其四维姿态
self.marker.pose.position.x = 0
self.marker.pose.position.y = 0
self.marker.pose.position.z = 0.03
self.marker.pose.orientation.x = 0
self.marker.pose.orientation.y = 0
self.marker.pose.orientation.z = 0
self.marker.pose.orientation.w = 1.0
# 修改坐标并发布marker
def pub_marker(self, x, y, z=0.03):
# 设置marker的时间戳
self.marker.header.stamp = rospy.Time.now()
# 设置marker的空间坐标
self.marker.pose.position.x = x
self.marker.pose.position.y = y
self.marker.pose.position.z = z
# 发布marker
self.pub.publish(self.marker)
# 让marker发生y
def run(self):
time.sleep(1)
self.pub_marker(0.1, -0.1)
time.sleep(1)
self.pub_marker(0.15, 0)
time.sleep(1)
self.pub_marker(0.15, -0.1)
time.sleep(1)
self.pub_marker(0.2, -0.1)
time.sleep(1)
self.pub_marker(0.15, -0.05)
time.sleep(1)
if __name__ == '__main__':
marker = Send_marker()
marker.run()