7.1 myCobot 280-自适应夹爪
安装图示


产品安装教程
第一步:
使用乐高科技件将夹爪固定在机械臂顶部。
第二步:
连接到M5 Basic的末端执行器扩展接口(在安装图示中有标注)。
技巧 可以在夹爪指尖粘贴橡胶,以获得更好的摩擦力。
注意事项
- 请确保产品已经按照说明连接成功
- 请确保产品供电为附带适配器供电
- 请确保电源适配器能正常工作
Arduino 环境下使用夹爪
电气连接
- 夹爪引脚与 Basic的末端执行器扩展接口连接
新建一个Arduino程序,内容如下:
// 此文件用于mycobot设备控制末端夹爪运动,对应烧录设备为Basic
// 烧录前请将夹爪张开至最大角度
//导入相关库:
#include <MycobotBasic.h>
#include <ParameterList.h>
//实例化函数:
MycobotBasic myCobot;
//初始化函数:
//编写setup函数,只在设备打开时执行一次setup函数:
void setup() {
myCobot.setup();
delay(10);
myCobot.powerOn();
delay(10);
myCobot.setGripperIni(); //设定夹爪当前位置电位值为2048
delay(20);
Serial.begin(9600);
}
//主体函数
//编写loop函数,程序循环执行loop函数:
void loop() {
myCobot.setEncoder(7,2048); //设定末端夹爪打开至2048电位值
delay(2000);
Serial.println(myCobot.getGripperValue()); //读取末端夹爪电位值
delay(50);
myCobot.setEncoder(7,1700); //设定末端夹爪打开至1700电位值
delay(2000);
Serial.println(myCobot.getGripperValue()); //读取末端夹爪电位值
delay(50);
}
Python 环境下使用夹爪
一、API 简介
1、 is_gripper_moving()
函数功能:判断夹爪是否正在运行。
返回参数:
1表示正在运行,0 表示没有运行,-1 表示出错
2、 set_encoder(joint_id, encoder)
函数功能:让指定关节点转动到指定位置
参数说明:
joint_id:取值范围 1~7,分别表示 1~6 个关节点以及夹爪。
encoder:取值范围 0~4096,2048 表示角度时的 0。
3、 set_encoders(encoders, sp)
函数功能:让机械臂移动到指定位置。
参数说明:
encoders:六个 int 元素的 list 集合,六个 encoder 数据的顺序分别代表 1~6 个关节点的位置。
sp:表示机械臂转动的速度。
4、 get_encoder(joint_id)
函数功能:获取指定关节点的 encoder 数据。
参数说明:
joint_id:取值范围 1~7,分别表示 1~6 个关节点以及夹爪。
返回值:
encoder:表示该关节的 encoder 数据信息。
5、 set_gripper_value(value, speed)
函数功能:让夹爪以指定的速度转动到指定的位置。
参数说明:
value:表示夹爪所要到达的位置,取值范围 0~4096。
speed:表示以多少的速度转动,取值范围 0~100。
6、 get_gripper_value()
函数功能:获取夹爪的encoder数据信息。
返回值:
encoder:夹爪的数据信息。
7、 set_gripper_state(flag, speed)
函数功能:让夹爪以指定的速度达到指定的状态。
参数说明:
flag:1 表示夹爪合拢,0 表示夹爪打开。
speed:表示以多快的速度达到指定的状态,取值范围 0~100。
二、代码内容
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
from pymycobot.mycobot import MyCobot
import time
def gripper_test(mc):
print("Start check IO part of api\n")
# 检测夹爪是否正在移动
flag = mc.is_gripper_moving()
print("Is gripper moving: {}".format(flag))
time.sleep(1)
# Set the current position to (2048).
# Use it when you are sure you need it.
# Gripper has been initialized for a long time. Generally, there
# is no need to change the method.
# mc.set_gripper_ini()
# 设置关节点1,让其转动到2048这个位置
mc.set_encoder(1, 2048)
time.sleep(2)
# 设置六个关节位,让机械臂以20的速度转动到该位置
mc.set_encoders([1024, 1024, 1024, 1024, 1024, 1024], 20)
time.sleep(3)
# 获取关节点1的位置信息
print(mc.get_encoder(1))
# 设置夹爪转动到2048这个位置
mc.set_encoder(7, 2048)
time.sleep(3)
# 设置夹爪让其转到1300这个位置
mc.set_encoder(7, 1300)
time.sleep(3)
# 以70的速度让夹爪到达2048状态
mc.set_gripper_value(2048, 70)
time.sleep(3)
# 以70的速度让夹爪到达1500状态
mc.set_gripper_value(1500, 70)
time.sleep(3)
# 设置夹爪的状态,让其以70的速度快速打开爪子
mc.set_gripper_state(0, 70)
time.sleep(3)
# 设置夹爪的状态,让其以70的速度快速收拢爪子
mc.set_gripper_state(1, 70)
time.sleep(3)
# 获取夹爪的值
print("")
print(mc.get_gripper_value())
if __name__ == "__main__":
# 初始化一个MyCobot对象
mc = MyCobot(PI_PORT, PI_BAUD)
# 让其移动到零位
mc.set_encoders([2048, 2048, 2048, 2048, 2048, 2048], 20)
time.sleep(3)
gripper_test(mc)
Roboflow 环境下使用夹爪
1、登录RoboFlow
 2、点击创建空项目
2、点击创建空项目
 3、选择基础功能点击夹爪
3、选择基础功能点击夹爪
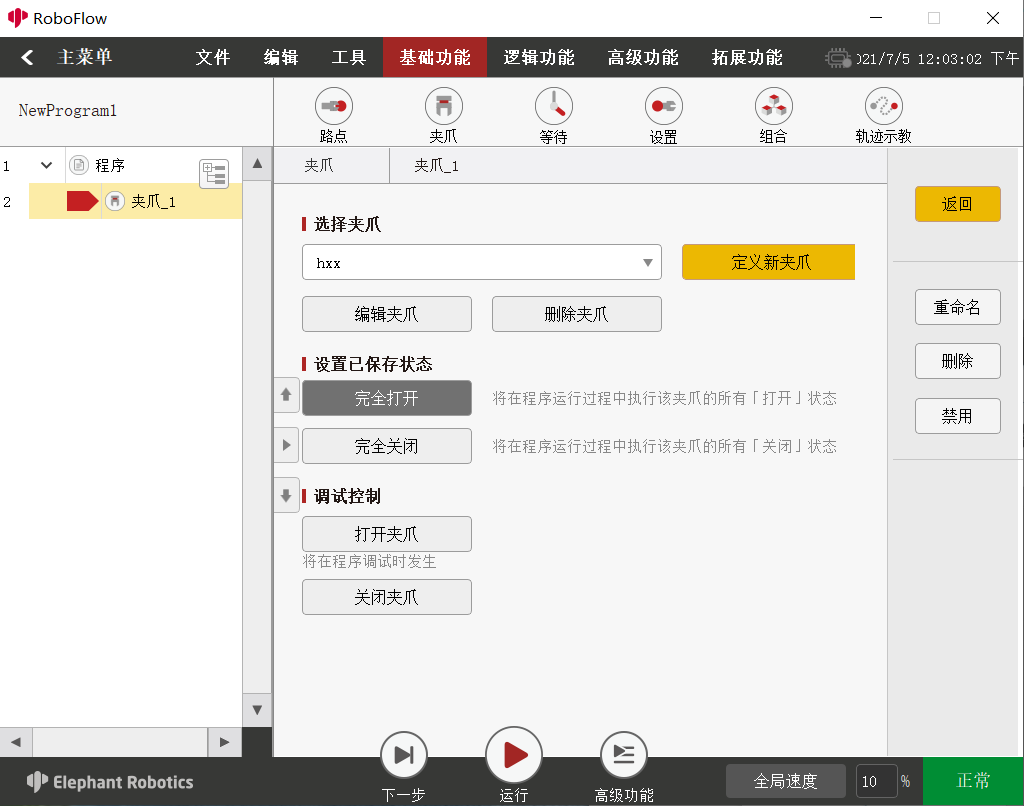
- 用户通过一个简单的功能定义和控制夹爪。
- 选择夹爪
- 设置已存在夹爪
- 选择夹爪,可以对已有夹爪进行编辑或者删除。
- 定义新夹爪如下图所示,可以命名夹爪,同时控制多个输入信号:设置需要控制的输出信号的数量、在“设置”中选择设置第几个信号、设置状态(关系到具体执行时对应“打开”或“关闭”功能)、设置对应输出信号。在设置完成后,还可以选择等待条件。

- 设置已保存状态
- 完全打开:执行夹爪定义中为“打开”状态的选项。
- 完全关闭:执行夹爪定义中为“关闭”状态的选项。 调试控制
- 打开夹爪:手动操作执行夹爪定义中为“打开”状态的选项。
- 关闭夹爪:手动操作执行夹爪定义中为“关闭”状态的选项。
4、设置对应参数

- 1.设置程序数量
- 2.设置程序ID
- 3.设置夹爪打开或者关闭
- 4.设置运行模式KEEP保持在设置状态
- 5.执行后等待时间,建议设置在2s-5s
5、点击关闭切换到关闭的设置
 6、等待
6、等待
- 如下图所示,等待指令一共有四种模式。
- 等待时间:可以设置延时时间,单位为秒。
- 等待输入信号:对输入信号的状态进行判断,除非符合已设置的输入信号状态条件,否则一直等待。
- 等待输出信号:对输出信号的状态进行判断,除非符合已设置的输出信号状态条件,否则一直等待。
- 等待条件:可以自定义等待条件,除非符合等待条件,否则一直等待。

7、设置
- 如下图所示,设置指令有四种模式的选择。
- 设置PIN:设置输出信号的状态,除了选择设置的输出信号,确定其是打开或关闭的状态,还可以设置该信号保持的时间。
- 设置条件:自定义设置的内容。
- 设置TCP(即工具中心点)。
- 设置载荷。

8、组合
- 如下图所示,组合指令提供了常用组合模板,例如抓取和放置组合。

- 用户使用组合模板时,例如使用抓取和放置模板,可以直接在模板程序的基础上修改参数、示教路点等,也可以根据需求自由增删指令。 使用组合模板可以简化用户查找指令的过程,更方便快捷完成对应项目的编程。
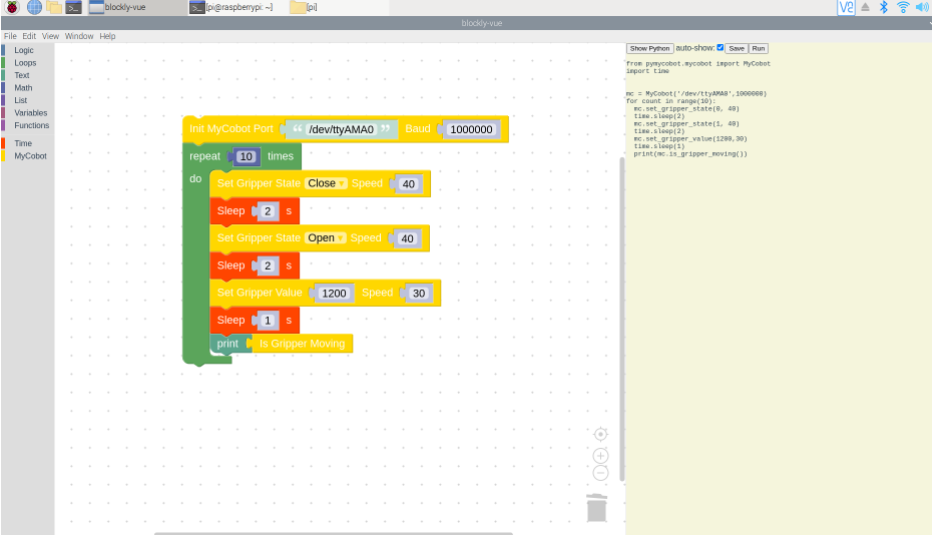
Myblockly 环境下使用夹爪
案例介绍
- 通过调用mycobot的Set_Gripper_State函数分别让夹爪进行10次张开收拢操作,并且在每组张开收拢后对其进行角度调位。
demo内容
Seria 环境下使用夹爪
1、通信协议与数据结构
- 读取夹爪角度
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X02 |
| Data[3] | 指令帧 | 0X65 |
| Data[4] | 结束帧 | 0XFA |
串口发送实例:FE FE 02 65 FA
返回数据结构
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 返回识别帧 | 0XFE |
| Data[1] | 返回识别帧 | 0XFE |
| Data[2] | 返回数据长度帧 | 0X04 |
| Data[3] | 指令帧 | 0X65 |
| Data[4] | 角度值高位 | Value_high |
| Data[5] | 角度值低位 | Value_low |
| Data[6] | 结束帧 | 0XFA |
- 设置夹爪模式
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X04 |
| Data[3] | 指令帧 | 0X66 |
| Data[4] | 夹爪开合 | 0X00/0X01 |
| Data[5] | 速度 | Sp |
| Data[6] | 结束帧 | 0XFA |
设置夹爪以20的速度张开
串口发送示例:FE FE 04 66 00 20 FA
无返回值
- 设置夹爪角度
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X05 |
| Data[3] | 指令帧 | 0X67 |
| Data[4] | 角度值高位 | Angle_high |
| Data[5] | 角度值低位 | Angle_low |
| Data[6] | 速度 | Sp |
| Data[7] | 结束帧 | 0XFA |
串口发送示例:FE FE 05 67 00 00 60 FA
Gripper_data:数据类型byte 取值范围0-1
无返回值
- 夹爪设置零点
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X02 |
| Data[3] | 指令帧 | 0X68 |
| Data[4] | 结束帧 | 0XFA |
设置夹爪当前位置为零点
串口发送示例:FE FE 02 68 FA
- 检测夹爪是否运动
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X02 |
| Data[3] | 指令帧 | 0X69 |
| Data[4] | 结束帧 | 0XFA |
串口发送示例:FE FE 02 69 FA
返回数据结构
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 返回识别帧 | 0XFE |
| Data[1] | 返回识别帧 | 0XFE |
| Data[2] | 返回数据长度帧 | 0X03 |
| Data[3] | 指令帧 | 0X69 |
| Data[4] | 静止/运动 | 0X00/0X01 |
| Data[5] | 结束帧 | 0XFA |
2、具体使用
设置夹爪零位
- 串口发送:FE FE 02 68 FA
设置夹爪模式
设置夹爪处于张开状态
串口发送:FE FE 04 66 00 70 FA
设置夹爪处于收拢状态
串口发送:FE FE 04 66 01 70 FA
读取夹爪角度
- 串口发送:FE FE 02 65 FA