ROS 简单使用
滑块控制
打开一个命令行,运行:
roslaunch mycobot_280 slider_control.launch
它将打开 rviz 和一个滑块组件,你将看到如下画面:
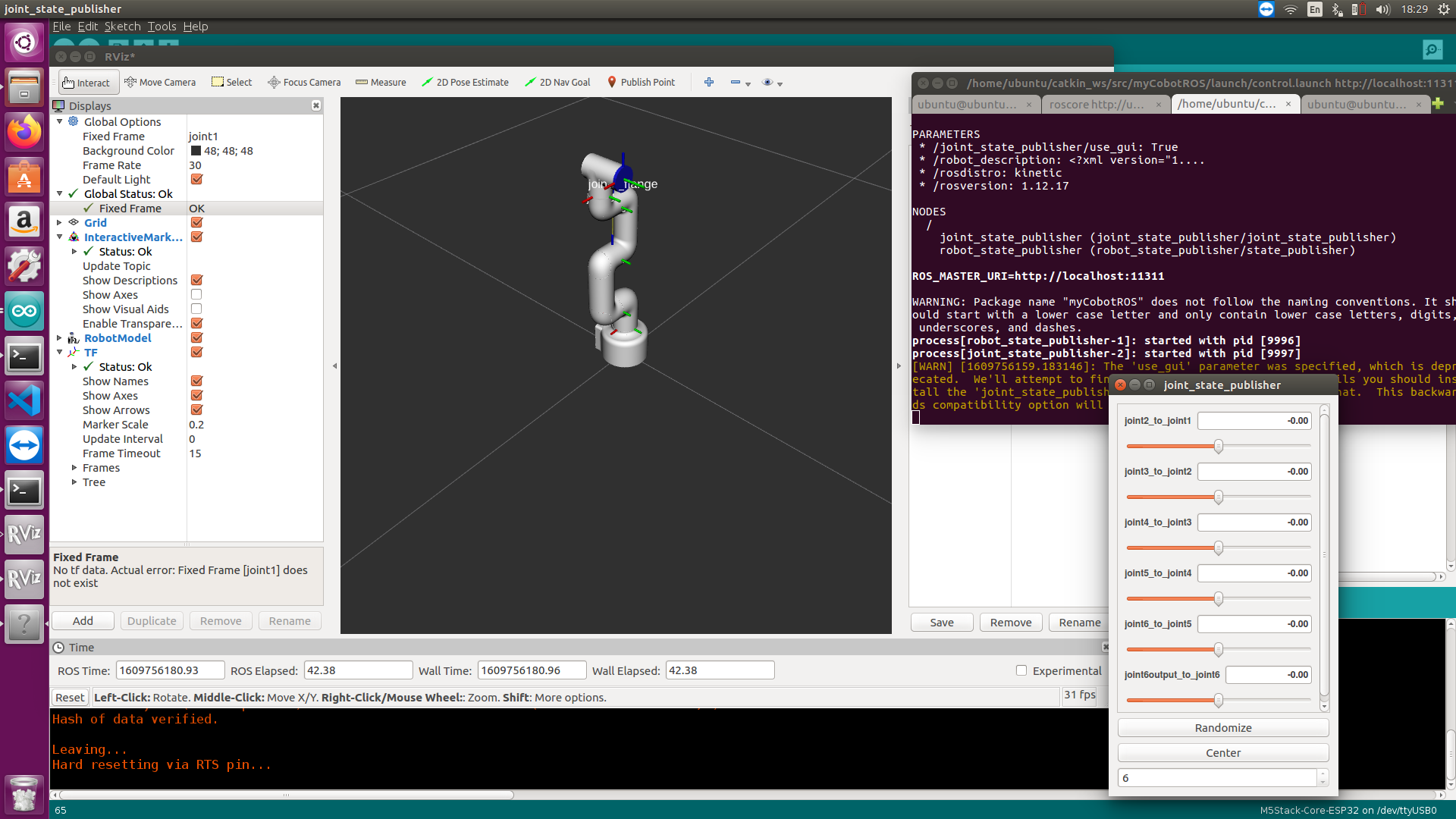
接着你可以通过拖动滑块来控制 rviz 中的模型移动。如果你想让真实的 mycobot 跟着一起运动,需要再打开一个命令行,运行:
rosrun mycobot_280 slider_control.py
#或者
rosrun mycobot_280 slider_control.py _port:=/dev/ttyUSB0 _baud:=115200
它将实时将角度发布给 mycobot。该脚本支持设置连接 mycobot 的端口号和波特率,默认为"/dev/ttyUSB0"和115200。
模型跟随
除了上面的控制,我们也可以让模型跟随真实的机械臂运动。打开一个命令行运行:
rosrun mycobot_280 follow_display.py
#或者
rosrun mycobot_280 follow_display.py _port:=/dev/ttyAMA0 _baud:=10000
它将发布真实机械臂的角度。该脚本支持设置端口号和波特率,默认为"/dev/ttyUSB0"和115200, 以上"/dev/ttyAMA0"和100000为 myCobot 280-Pi 所对应的端口号和波特率。
然后打开另一个命令行,运行:
roslaunch mycobot_280 mycobot_follow.launch
它将打开 rviz 展示模型跟随效果。