文档目录
1 大象机器人
1.1 公司简介
1.2 my系列发展历程
1.3 如何阅读
1.4 如何优雅地提问
2 设备选购指南
2.1 myCobot 280
2.1.1 280-M5
2.1.2 280-Pi
2.2 myCobot 320
2.2.1 320-M5
2.2.2 320-Pi
2.3 myCobot Pro 600
2.4 myPalletizer 260
2.5 myAGV
2.6 配件
2.6.1 平面底座
2.6.2 G型底座
2.6.3 吸盘底座
2.6.4 吸泵
2.6.5 自适应夹爪
2.6.6 摄像头法兰
2.6.7 模块吸盘
2.6.8 电动夹爪
2.6.9 气动夹爪
2.7 高级套装
2.7.1 人工智能套装
3 简单上手
3.1 拖动示教
3.1.1 微控制器
3.1.2 微处理器
3.2 机械臂校准
3.2.1 微控制器
3.2.2 微处理器
3.3 通讯转发
3.3.1 微控制器
3.3.2 微处理器
3.4 连接检测
3.4.1 微控制器
3.4.2 微处理器
4 开发前的准备
4.1 MyStudio
4.1.1 环境搭建
4.1.2 简单使用
4.2 RoboFlow
4.2.1 环境搭建
4.2.2 简单使用
4.3 Myblockly
4.3.1 环境搭建
4.3.2 简单使用
4.4 Python
4.4.1 环境搭建
4.4.2 简单使用
4.5 Arduino
4.5.1 环境搭建
4.5.2 简单使用
4.6 C++
4.6.1 环境搭建
4.6.2 简单使用
4.7 ROS
4.7.1 环境安装
4.7.2 简单使用
4.8 通信与报文命令
4.8.1 环境搭建
4.8.2 简单使用
5 进阶教程
5.1 关节控制
5.1.1 通用库
5.1.2 非通用库
5.2 坐标控制
5.2.1 通用库
5.2.2 非通用库
5.3 IO控制
5.3.1 通用库
5.3.2 非通用库
5.4 设备通讯
5.4.1 串口通讯
5.4.2 网络通讯
5.5 微控制器
5.5.1 开关力矩
5.5.2 屏幕显示
5.6 LED灯
5.6.1 通用库
5.6.2 非通用库
5.7 myAGV快速开始
5.7.1 VNC设置
5.7.2 实时建图
5.7.3 地图导航
5.7.4 ps4手柄控制
5.7.5 屏幕连接
5.7.6 myAGV与机械臂联动
5.7.7 摄像头精准定位
5.7.8 myAGV与机械臂连接
6 API手册
6.1 arduino库
6.1.1 产品通用
6.1.2 区别
6.2 python库
6.2.1 产品通用
6.2.2 区别
6.3 C/C++库
6.3.1 产品通用
6.3.2 区别
6.4 串口通信
6.4.1 通用指令
6.4.2 区别
7 末端执行器选型
7.1 myCobot 280-自适应夹爪
7.2 myCobot 320-自适应夹爪
7.3 气动夹爪
7.4 电动夹爪
7.5 吸泵
7.6 模块吸盘
7.7 摄像头法兰
8 高级套装
8.1 人工智能套装
8.1.1 知识准备
8.1.1.1 吸泵搭建
8.1.1.2 校准摄像头
8.1.1.3 ROS建立方块模型
8.1.2 识别颜色物块
8.1.2.1 识别颜色物块实现
8.1.3 识别图像物块
8.1.3.1 识别图像物块实现
8.1.4 识别aruco码物块
8.1.4.1 识别aruco码物块实现
8.2 工业套装4.0
9 FAQ
9.1 驱动相关
9.2 软件问题
9.3 硬件问题
Published with GitBook
在这篇文章中:
4.3.2 简单使用
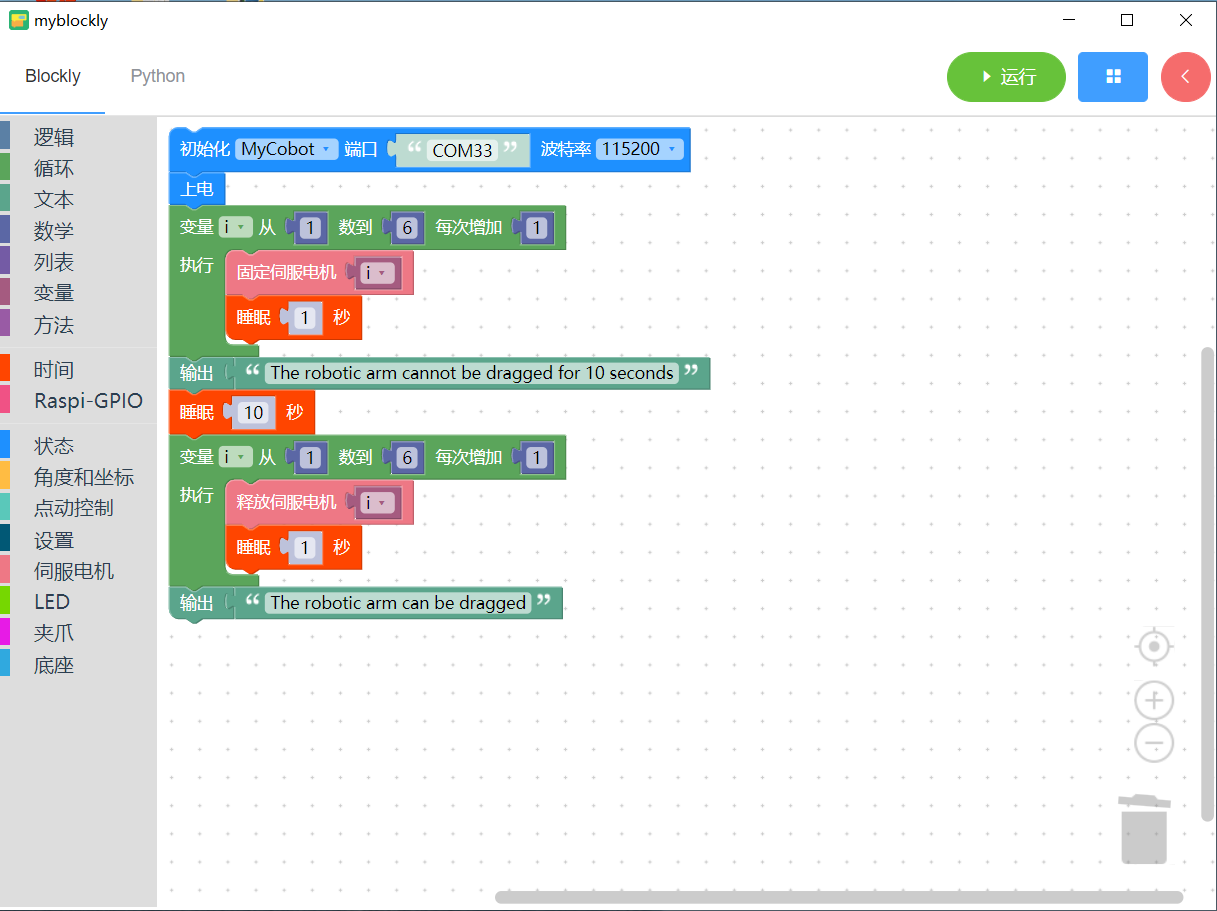
Myblockly 简单使用
机械臂放松以及固定
本案里通过循环对六个关节点进行固定,并其固定十秒,最后通过循环分别让六个关节点放松。
demo内容
**此 demo 也可以通过点击
此地址:
查看查看。
results matching "
"
No results matching "
"