7.5 吸泵
安装图示

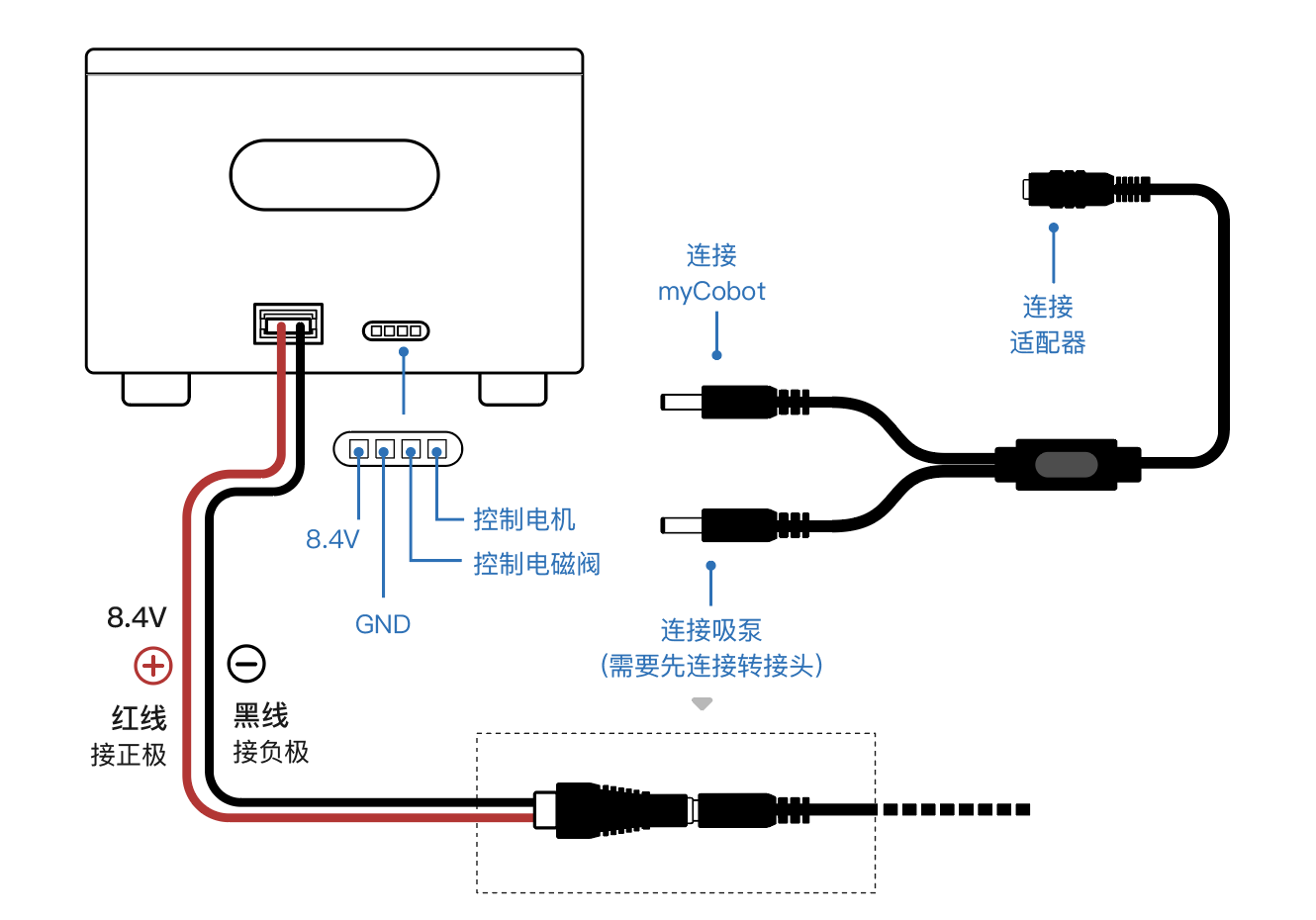
接线示意图
产品安装教程文字
第一步:
母头线--电源线端连接吸泵左边的端口,另一端连接一入两出线出口端,另外出口端连接机械臂电源口,入口端连接电源适配器。
- 第二步: 杜邦线的插针端连接(接线示意图)注释的控制电机和电磁阀的接口,另一端连接机械臂G2、G5引脚(M5)20、21引脚(Pi)。
第三步:
使用乐高科技件将吸泵头固定在机械臂末端。
产品安装教程视频
无法观看请点击安装教程观看
注意事项
- 请确保产品已经按照说明连接成功
- 请确保产品供电为附带适配器供电
- 请确保电源适配器能正常工作
- 请确保正负极的接入方向
Arduino 环境下使用吸泵
电气连接
- 将吸泵的引脚与Baisc引脚连接到一起
- 电磁阀控制引脚连接 Baisc - G2 引脚
- 泵机控制引脚连接 Basic - G5 引脚
新建一个Arduino程序,内容如下:
//导入所需库:
//Arduino默认库,无需导入其他库。·1
//setup函数,只在设备打开时执行一次setup函数:
#include <MycobotBasic.h>
#include <ParameterList.h>
// 请确认电磁阀连接G2引脚,泵机链接G5引脚
// 连接完成后,高电平关闭,低电平打开
void setup() {
// put your setup code here, to run once:
Serial.begin(9600);//打开串口,波特率9600
pinMode(2,OUTPUT); //设定引脚G2为输出状态
pinMode(5,OUTPUT); //设定引脚G5为输出状态
delay(100);
digitalWrite(2,1);//将引脚2设为高电平,关闭电磁阀
digitalWrite(5,1);//将引脚5设为高电平,关闭泵机
}
//loop函数,程序循环执行loop函数:
void loop() {
// 使用时按照需求控制电磁阀与泵机
digitalWrite(5,0);//将引脚5设为低电平,打开泵机
delay(200);//延时200ms
digitalWrite(2,0);//将引脚2设为低电平,打开电磁阀
delay(2000);//延时2000ms,松开吸住的物体
digitalWrite(2,1);//将引脚2设为高电平,关闭电磁阀
delay(200);//延时200ms
digitalWrite(5,1);//将引脚5设为高电平,关闭泵机
delay(200);//延时200ms
}
Python 环境下使用吸泵
电气连接
- 将吸泵的引脚与Baisc引脚连接到一起
- 电磁阀控制引脚连接 Baisc - G2 引脚
- 泵机控制引脚连接 Basic - G5 引脚
新建一个Python程序,内容如下:
from pymycobot.mycobot import MyCobot
from pymycobot import PI_PORT, PI_BAUD # 当使用树莓派版本的mycobot时,可以引用这两个变量进行MyCobot初始化
import time
# 初始化一个MyCobot对象
mc = MyCobot(PI_PORT, PI_BAUD)
# 开启吸泵
def pump_on():
# 让2号位工作
mc.set_basic_output(2, 0)
# 让5号位工作
mc.set_basic_output(5, 0)
# 停止吸泵
def pump_off():
# 让2号位停止工作
mc.set_basic_output(2, 1)
# 让5号位停止工作
mc.set_basic_output(5, 1)
pump_off()
time.sleep(3)
pump_on()
time.sleep(3)
pump_off()
time.sleep(3)
Seria 环境下使用吸泵
1、通信协议与数据结构
注意:使用通信协议直接通信,需要在basic中烧录transponder,在atom中烧录最新版的atomMain
- 设置底座IO输出
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X04 |
| Data[3] | 指令帧 | 0Xa0 |
| Data[4] | 引脚序号 | Pin_no |
| Data[5] | 电平信号 | 0X00/0X01 |
| Data[6] | 结束帧 | 0XFA |
设置引脚2为高电平
串口发送示例:FE FE 04 a0 02 01 FA
无返回值
- 读取底座IO输出
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X03 |
| Data[3] | 指令帧 | 0Xa1 |
| Data[4] | 引脚序号 | Pin_no |
| Data[5] | 结束帧 | 0XFA |
串口发送示例:FE FE 03 a1 02 FA
返回数据结构
| 数据域 | 说明 | 数据 |
|---|---|---|
| Data[0] | 识别帧 | 0XFE |
| Data[1] | 识别帧 | 0XFE |
| Data[2] | 数据长度帧 | 0X04 |
| Data[3] | 指令帧 | 0Xa1 |
| Data[4] | 引脚序号 | Pin_no |
| Data[5] | 电平信号 | 0X00/0X01 |
| Data[6] | 结束帧 | 0XFA |
2、具体使用
- 吸泵吸取物品
- 将引脚5设为低电平,打开泵机
- 串口发送:FE FE 04 a0 05 00 FA
- 将引脚2设为低电平,打开电磁阀
- 串口发送:FE FE 04 a0 02 00 FA
- 吸泵松开物品
- 将引脚5设为高电平,关闭泵机
- 串口发送:FE FE 04 a0 05 01 FA
- 将引脚2设为高电平,关闭电磁阀
- 串口发送:FE FE 04 a0 02 01 FA