吸泵连接
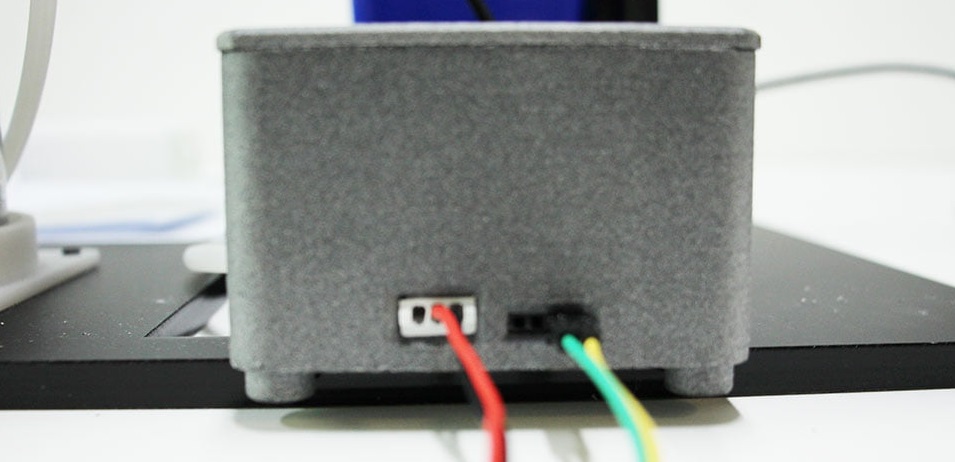
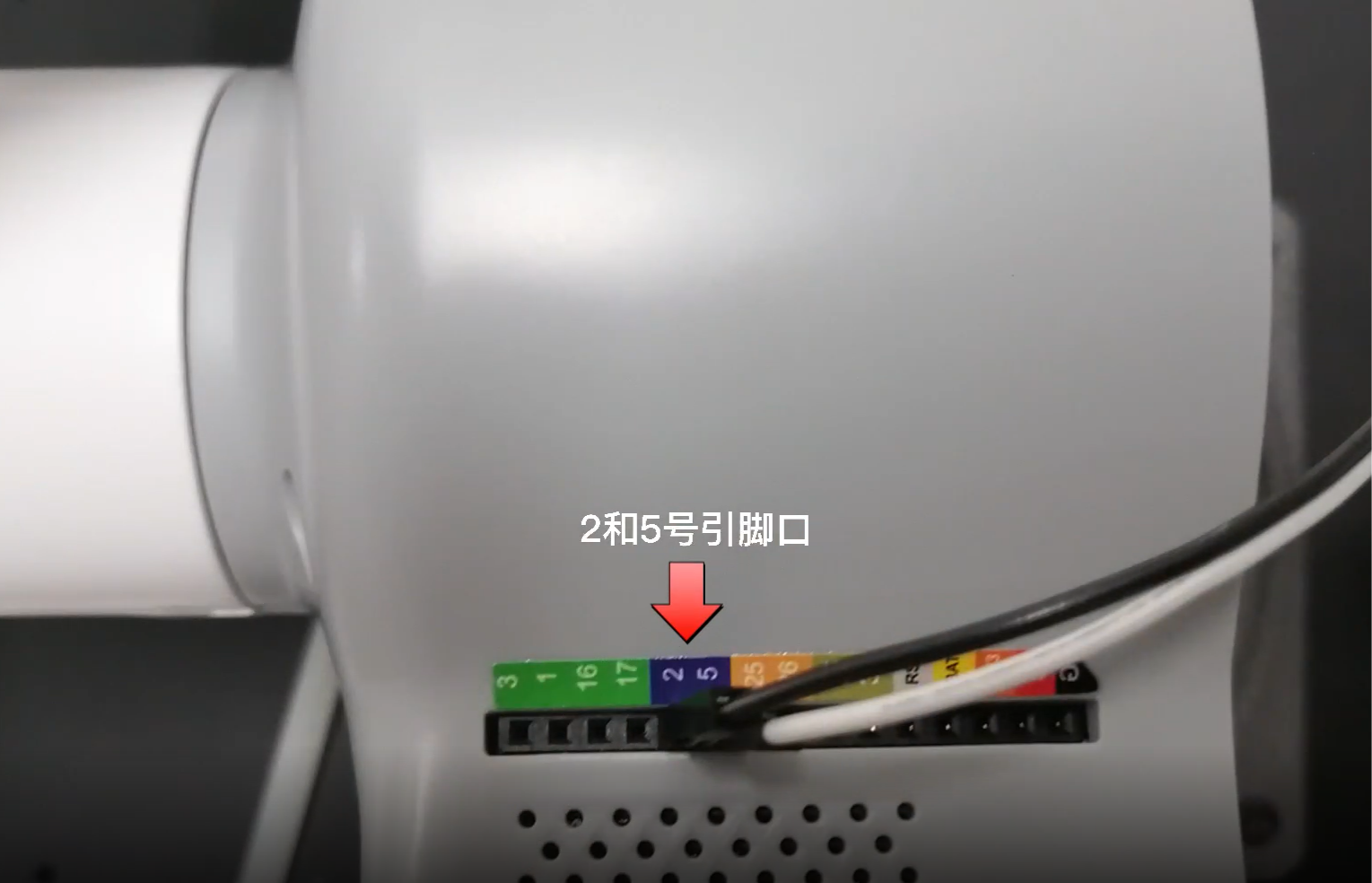
如上图所示,使用积木键将吸泵搭载到机械臂的头部,通过两根杜邦线连接机械臂的底部和吸泵盒。注意:机械臂底部是连接2和5接口,吸泵盒是连接最右边的两个孔。若连接出错很容易引起机械臂底部M5的烧毁!!!
M5版本:连接机械左侧的2,5引脚接口。
树莓派:版本连接20,21引脚,实际位置靠近电源接口的第一排最边上两个口。

代码实现
接下来我们将使用代码来感受下吸泵的使用吧。
在 mycobot_ros 项目中,有一个 mycobot_ai 包,在包中的script中已将机械臂的一些动作封装了起来,其中包括了吸泵的使用。所以,只需在创建见类的时候继承它即可。在 mycobot_ros 项目中有给出一个吸泵使用案例,只需将所需的设备连接好后运行即可实现吸泵的使用。设备的连接请自行完成,接下来将简述如何运行案例。
M5版本
ls /dev/ttyUSB* # 查看机械臂设备名称
sudo chmod 777 /dev/ttyUSB0 # 给查看的设备赋予权限(这里假设查看到的设备名称为/dev/ttyUSB0)
roslaunch <ros-workspace>/src/mycobot/mycobot_ai/launch/vision.launch # 在启动该文件前需要修改该文件内的port值
python <ros-workspace>/src/mycobot/mycobot_ai/script/pump.py # 运行吸泵程序
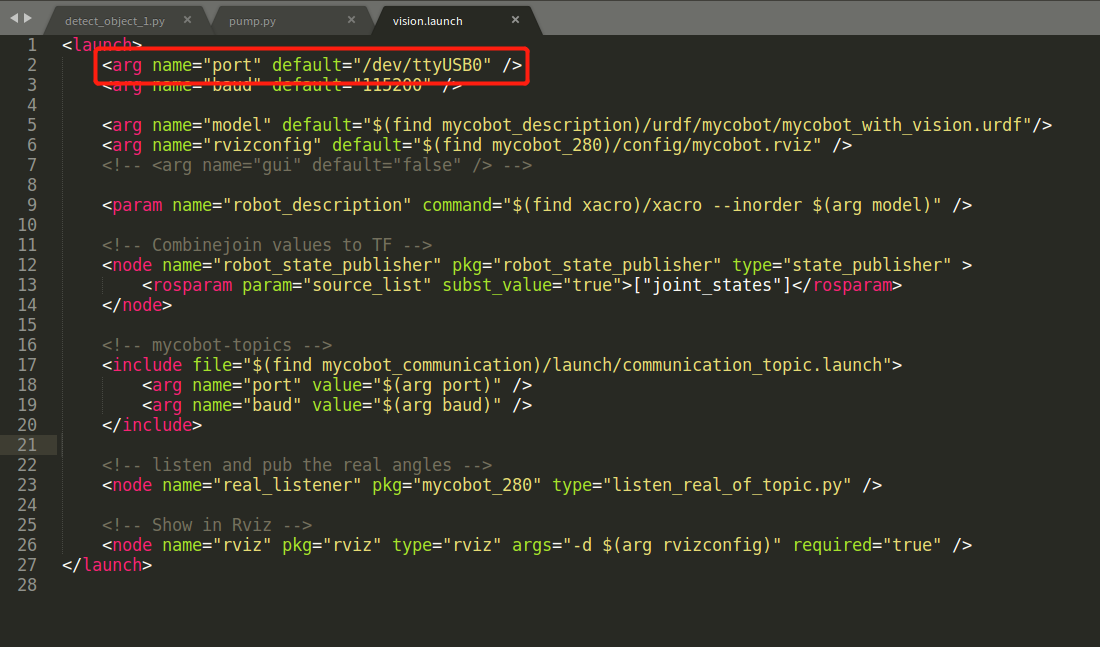
修改 vision.launch 中的内容,如下图所示,修改 port 的 default 值与查看到的机械臂设备名称保持一致。若不修改,可能会导致 vision.launch 启动失败。
树莓派版本
吸泵控制:
# python3
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(20, GPIO.OUT)
GPIO.setup(21, GPIO.OUT)
# 打开吸泵
GPIO.output(20, 0)
GPIO.output(21, 0)
# 关闭吸泵
GPIO.output(20, 1)
GPIO.output(21, 1)